- ДИСКРЕТНЫЕ САУ Понятие дискретной САУ.

Содержание
- 3. При квантовании по уровню дискретный сигнал принимает значения непрерывного сигнала, соответствующие заданным уровням Реализуется в релейных
- 4. При квантовании по времени дискретный сигнал принимает значения непрерывного в определенные, равно отстоящие друг от друга
- 5. Квантование по времени осуществляется в импульсных системах Процесс формирования непрерывного сигнала в последовательность импульсов называется модуляцией.
- 6. Широтно-импульсная модуляция (ШИМ) При ней амплитуда импульсов всегда постоянна а их длительность изменяется в зависимости от
- 7. Время- импульсная модуляция (ВИМ). При ней значению модулируемого сигнала в дискретные равнооотстоящие моменты времени соответствует временной
- 8. Различают: фазо-импульсную модуляцию (ФИМ) частотно-импульсную модуляцию (ЧИМ) Если при изменении полярности модулирующего сигнала может изменяться полярность
- 9. Импульсные системы бывают линейными и нелинейными. В линейных импульсных САУ линейными уравнениями описывается как непрерывная часть,
- 10. Сигнал, квантованный по времени и уровню, принимает значения уровня непрерывного сигнала в дискретные, равно отстоящие друг
- 11. ОСНОВЫ МАТЕМАТИЧЕСКОГО ОПИСАНИЯ САУ С АИМ Понятие решетчатой функции. Разности решетчатых функций и разностные уравнения Функция,
- 12. Любой непрерывной функции f(t) будет соответствовать единственная решетчатая функция , но одной решетчатой функции может соответствовать
- 13. Такие решетчатые функции называют смещёнными. Смещённые решетчатые функции позволяют путём изменения смещения оценить поведение непрерывной функции
- 14. Ей будет соответствовать решетчатая функция Аналогично для относительного смещения непрерывной функции будет соответствовать смещённая решетчатая функция
- 15. Соотношение между решетчатой функцией и ее разностями различных порядков определяет разностное уравнение. Если эти соотношения линейны,
- 16. Дискретное преобразование Лапласа Дискретное преобразование Лапласа является функциональным преобразованием решетчатых функций и определяется соотношением или где
- 17. Символьная запись дискретного преобразования Лапласа Дискретное преобразование Лапласа устанавливает соответствие между решетчатой функцией и функцией комплексной
- 18. Изображения, полученные с помощью дискретного преобразования Лапласа, будут содержать трансцендентный множитель – функцию вида Если r
- 19. Обратное дискретное преобразование Лапласа
- 20. Если особые точки изображения расположены правее прямой L, то вычисление интеграла можно произвести через вычеты: Свойства
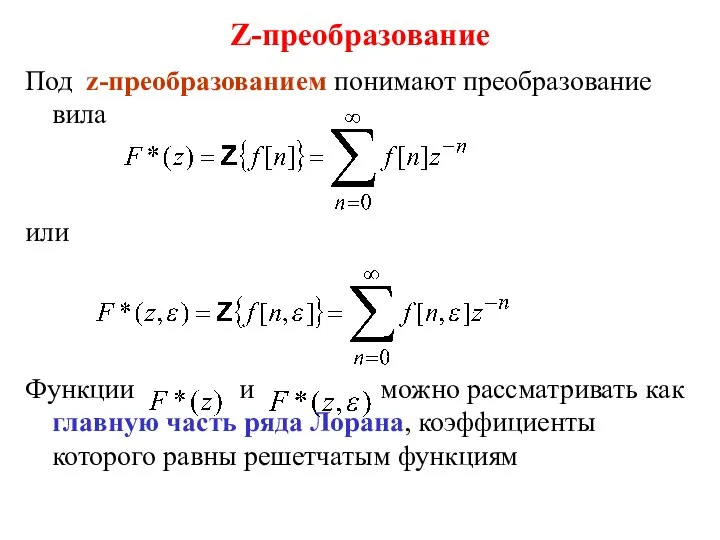
- 21. Z-преобразование Под z-преобразованием понимают преобразование вила или Функции и можно рассматривать как главную часть ряда Лорана,
- 22. Z-преобразование получается из дискретного преобразования Лапласа путем замены множителя на Обратное Z-преобразование Здесь Г –окружность единичного
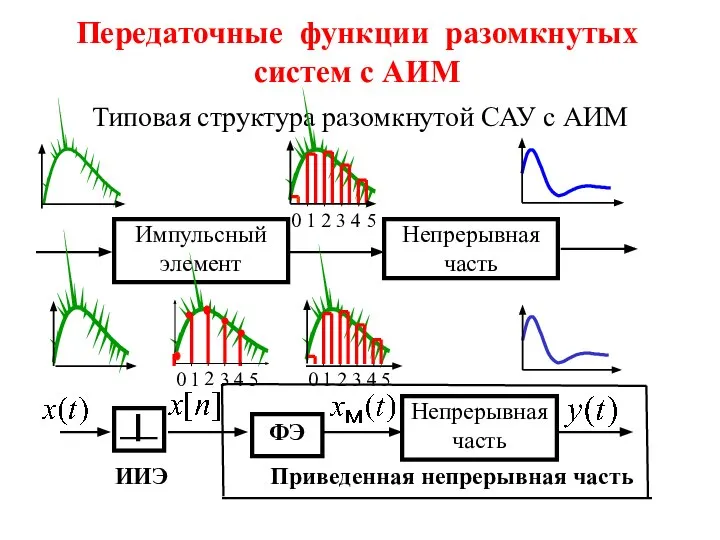
- 23. Передаточные функции разомкнутых систем с АИМ Типовая структура разомкнутой САУ с АИМ
- 24. Здесь: ИИЭ – идеальный импульсный элемент ФЭ – формирующий элемент На выходе ИИЭ в моменты времени
- 25. Импульсная переходная характеристика такого формирующего элемента а его передаточная функция Такой формирующий элемент, называется фиксатором (экстраполятором)
- 26. Структурная схема фиксатора нулевого порядка Поскольку передаточные функции формирующего элемента и непрерывной части описываются обычным преобразование
- 27. Передаточная функция разомкнутой САУ с АИМ В то же время, если – передаточная функция приведённой непрерывной
- 28. Таким образом, передаточная функция разомкнутой системы с АИМ равна передаточной функции ее приведенной непрерывной части в
- 29. Замкнутые импульсные системы можно привести к системе, состоящей из идеального импульсного элемента и приведенной непрерывной части
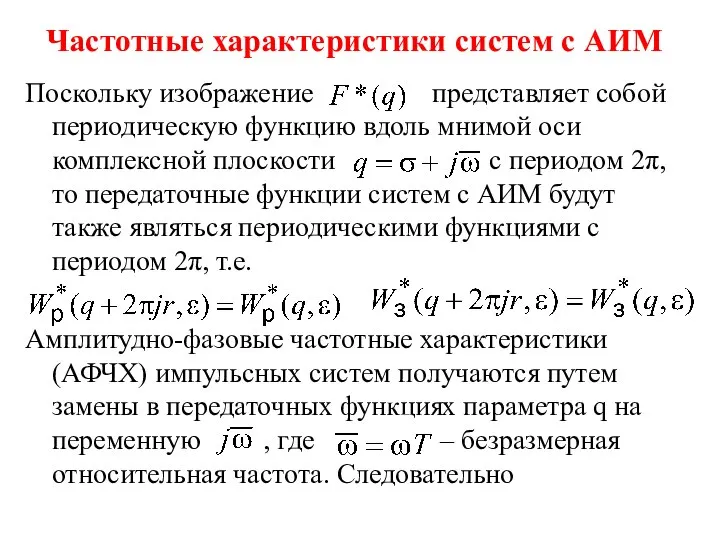
- 30. Частотные характеристики систем с АИМ Поскольку изображение представляет собой периодическую функцию вдоль мнимой оси комплексной плоскости
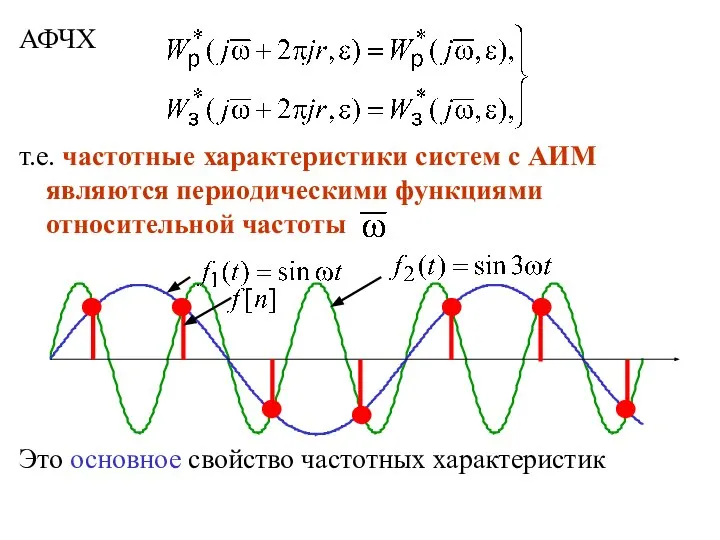
- 31. АФЧХ т.е. частотные характеристики систем с АИМ являются периодическими функциями относительной частоты Это основное свойство частотных
- 32. Другие свойства частотных характеристик САУ с АИМ: Зависимость частотных характеристик от , обычно строят характеристики для
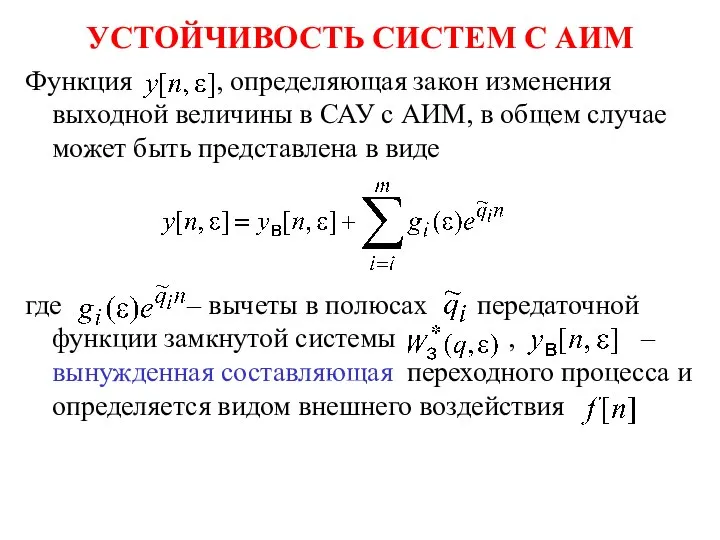
- 33. УСТОЙЧИВОСТЬ СИСТЕМ С АИМ Функция , определяющая закон изменения выходной величины в САУ с АИМ, в
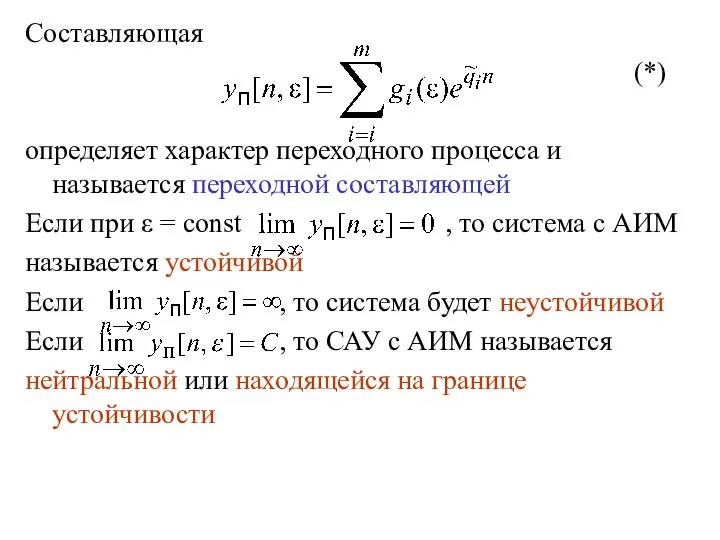
- 34. Составляющая (*) определяет характер переходного процесса и называется переходной составляющей Если при ε = const ,
- 35. Очевидно, что, если полюсы передаточной функции замкнутой системы будут иметь отрицательные вещественные части, то при все
- 36. Таким образом, для того чтобы САУ с АИМ была устойчива, необходимо и достаточно, чтобы все полюсы
- 37. Если САУ описано с помощью модифицированного z-преобразования путём замены , т.е. передаточная функция замкнутой системы принимает
- 38. Поэтому для устойчивой САУ с АИМ необходимо и достаточно, чтобы все полюсы передаточной функции располагались бы
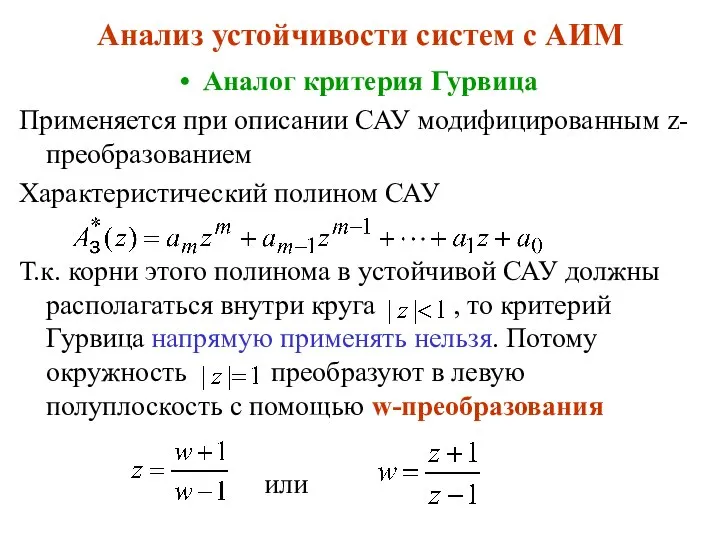
- 39. Анализ устойчивости систем с АИМ Аналог критерия Гурвица Применяется при описании САУ модифицированным z-преобразованием Характеристический полином
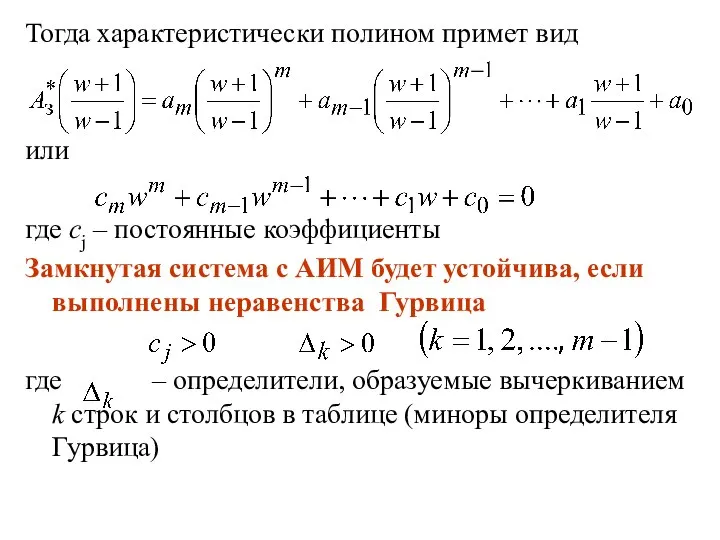
- 40. Тогда характеристически полином примет вид или где cj – постоянные коэффициенты Замкнутая система с АИМ будет
- 41. Миноры определителя Гурвица На границе устойчивости Пример: пусть , тогда , причём
- 42. Условия устойчивости САУ: Аналог критерия Михайлова При исследовании устойчивости САУ с АИМ с помощью аналога критерия
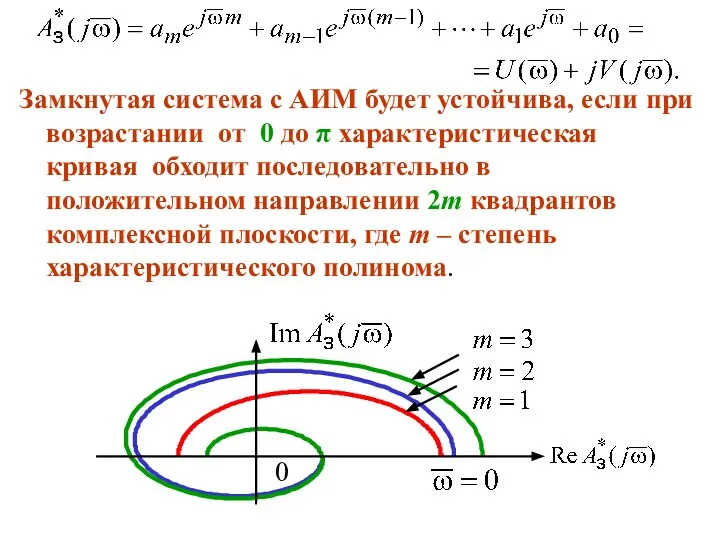
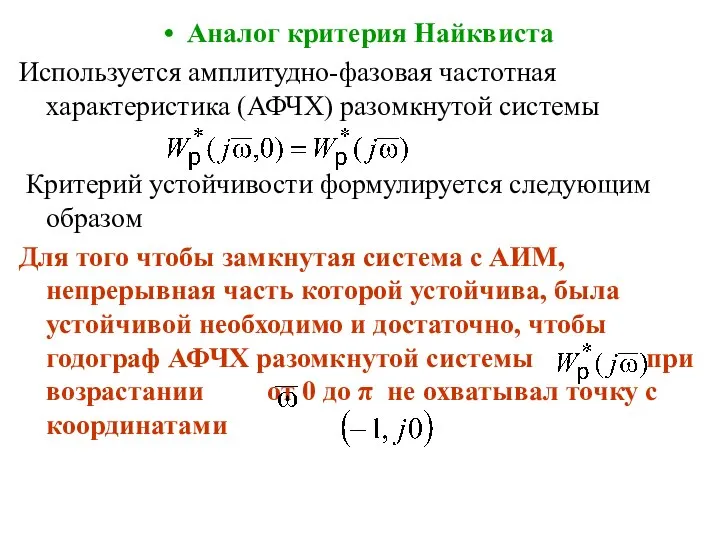
- 43. Замкнутая система с АИМ будет устойчива, если при возрастании от 0 до π характеристическая кривая обходит
- 44. Граница устойчивости системы определяется совокупностью параметров, при которых характеристическая кривая проходит через начало координат, т.е. на
- 45. Аналог критерия Найквиста Используется амплитудно-фазовая частотная характеристика (АФЧХ) разомкнутой системы Критерий устойчивости формулируется следующим образом Для
- 46. Годограф АФЧХ устойчивой САУ На границе устойчивости
- 47. Удаление годографа от точки характеризует запасы устойчивости по фазе и амплитуде (модулю, усилению). Запас устойчивости по
- 49. Скачать презентацию

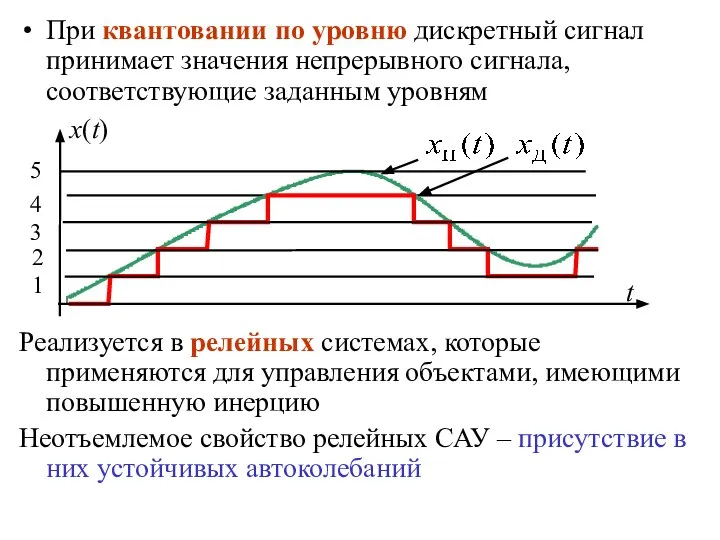
При квантовании по уровню дискретный сигнал принимает значения непрерывного сигнала, соответствующие
При квантовании по уровню дискретный сигнал принимает значения непрерывного сигнала, соответствующие
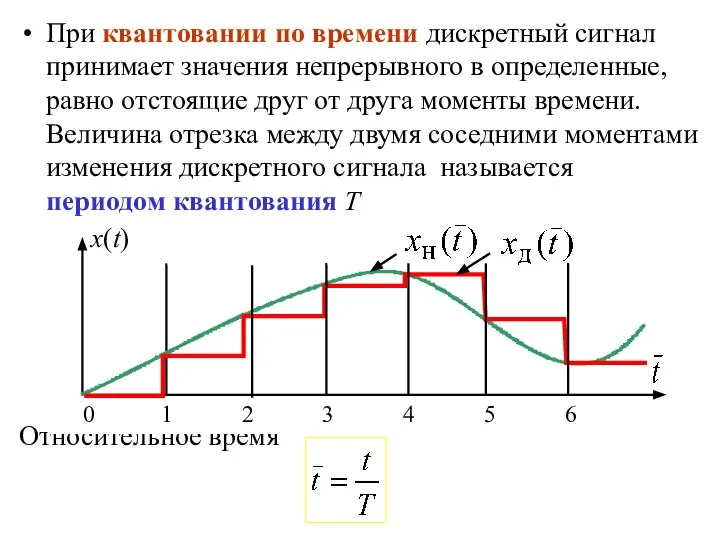
При квантовании по времени дискретный сигнал принимает значения непрерывного в определенные,
При квантовании по времени дискретный сигнал принимает значения непрерывного в определенные,
Квантование по времени осуществляется в импульсных системах
Процесс формирования непрерывного сигнала в
Квантование по времени осуществляется в импульсных системах
Процесс формирования непрерывного сигнала в

Широтно-импульсная модуляция (ШИМ)
При ней амплитуда импульсов всегда постоянна
а их длительность
Широтно-импульсная модуляция (ШИМ)
При ней амплитуда импульсов всегда постоянна
а их длительность
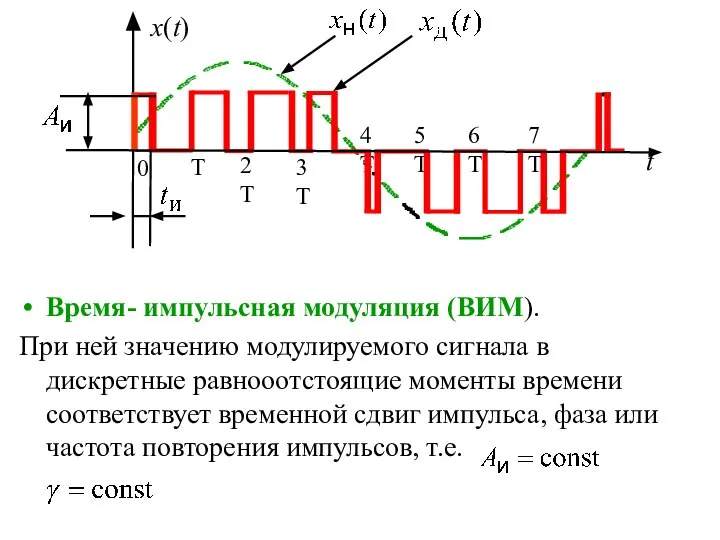
Время- импульсная модуляция (ВИМ).
При ней значению модулируемого сигнала в дискретные равнооотстоящие
Время- импульсная модуляция (ВИМ).
При ней значению модулируемого сигнала в дискретные равнооотстоящие
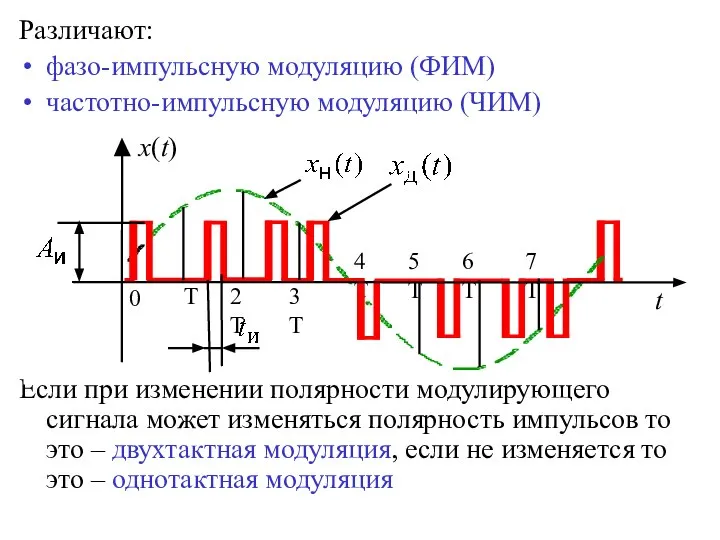
Различают:
фазо-импульсную модуляцию (ФИМ)
частотно-импульсную модуляцию (ЧИМ)
Если при изменении полярности модулирующего сигнала может
Различают:
фазо-импульсную модуляцию (ФИМ)
частотно-импульсную модуляцию (ЧИМ)
Если при изменении полярности модулирующего сигнала может
Импульсные системы бывают линейными и нелинейными. В линейных импульсных САУ линейными
Импульсные системы бывают линейными и нелинейными. В линейных импульсных САУ линейными
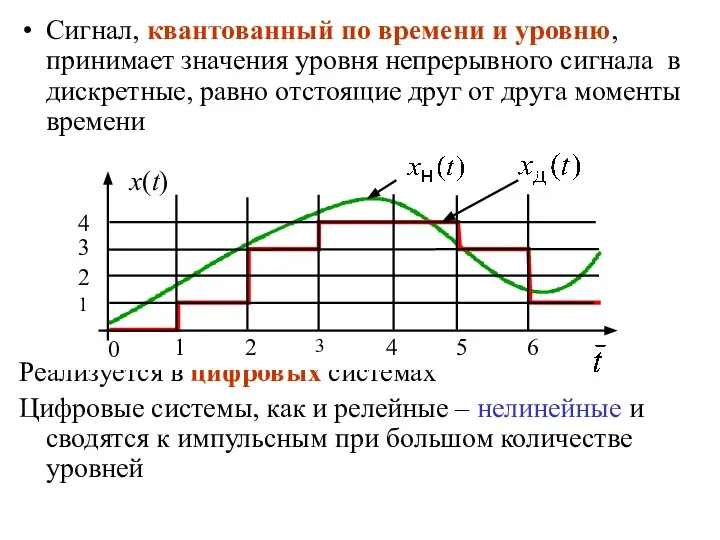
Сигнал, квантованный по времени и уровню, принимает значения уровня непрерывного сигнала
Сигнал, квантованный по времени и уровню, принимает значения уровня непрерывного сигнала
ОСНОВЫ МАТЕМАТИЧЕСКОГО ОПИСАНИЯ САУ С АИМ
Понятие решетчатой функции. Разности
решетчатых функций
ОСНОВЫ МАТЕМАТИЧЕСКОГО ОПИСАНИЯ САУ С АИМ
Понятие решетчатой функции. Разности
решетчатых функций
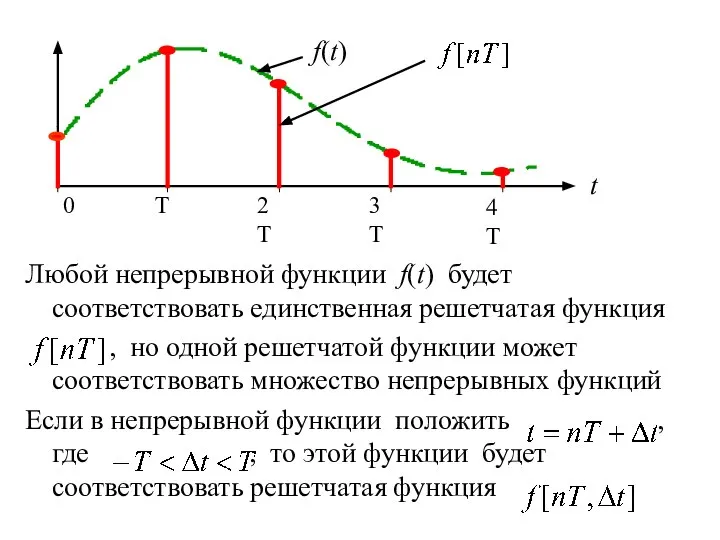
Любой непрерывной функции f(t) будет соответствовать единственная решетчатая функция
,
Любой непрерывной функции f(t) будет соответствовать единственная решетчатая функция
,
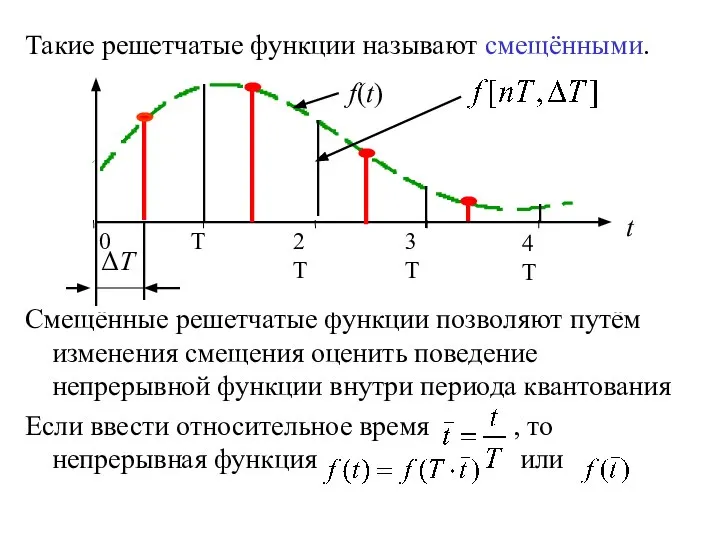
Такие решетчатые функции называют смещёнными.
Смещённые решетчатые функции позволяют путём изменения смещения
Такие решетчатые функции называют смещёнными.
Смещённые решетчатые функции позволяют путём изменения смещения
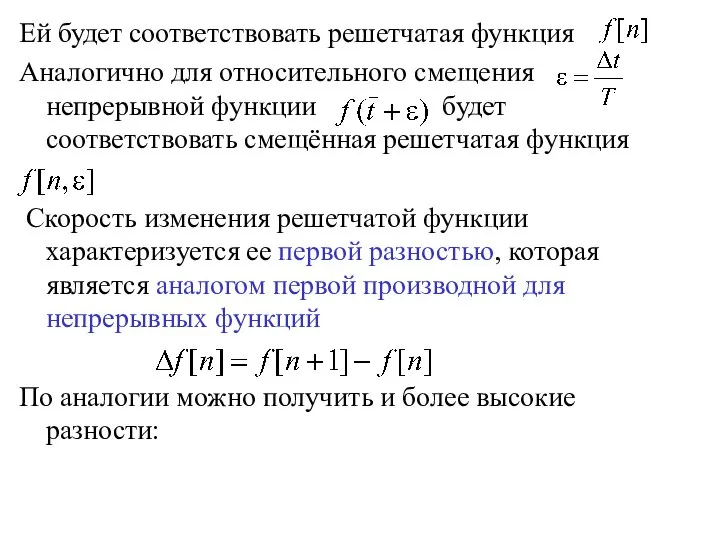
Ей будет соответствовать решетчатая функция
Аналогично для относительного смещения непрерывной функции будет
Ей будет соответствовать решетчатая функция
Аналогично для относительного смещения непрерывной функции будет
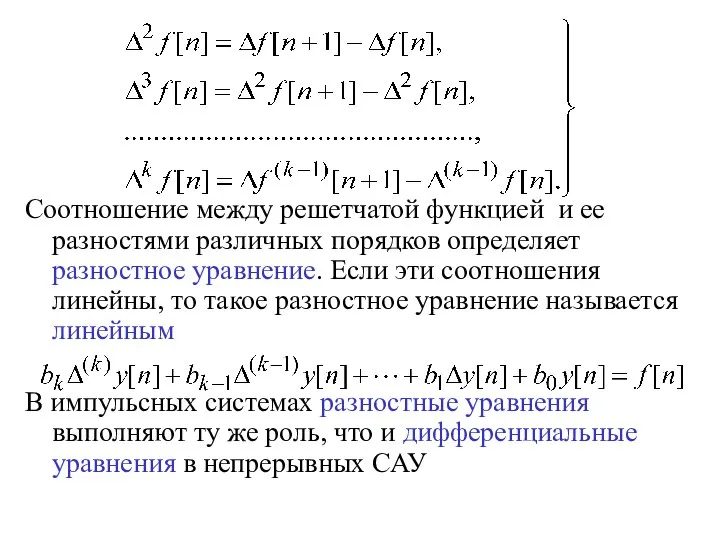
Соотношение между решетчатой функцией и ее разностями различных порядков определяет разностное
Соотношение между решетчатой функцией и ее разностями различных порядков определяет разностное
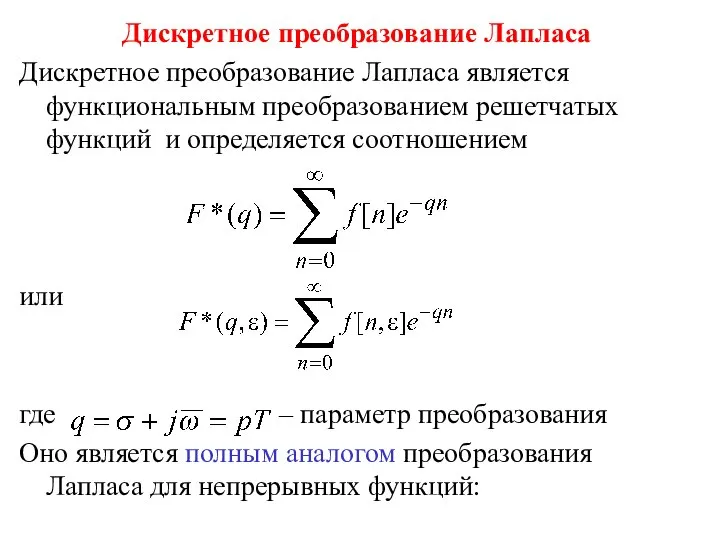
Дискретное преобразование Лапласа
Дискретное преобразование Лапласа является функциональным преобразованием решетчатых функций и
Дискретное преобразование Лапласа
Дискретное преобразование Лапласа является функциональным преобразованием решетчатых функций и
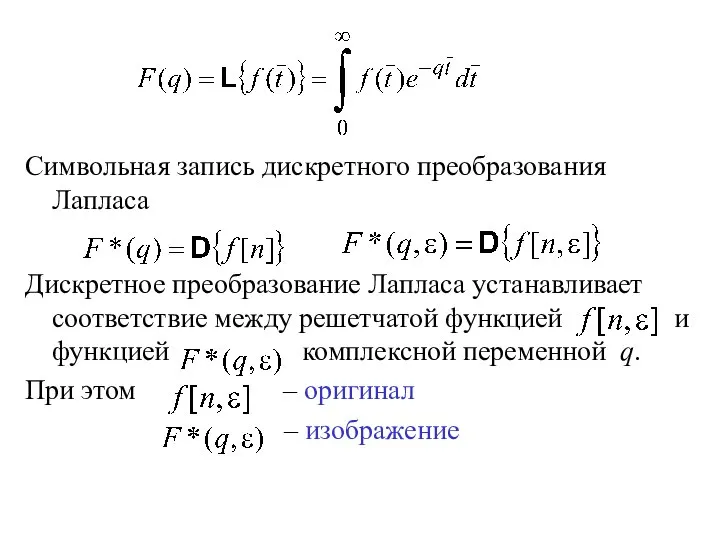
Символьная запись дискретного преобразования Лапласа
Дискретное преобразование Лапласа устанавливает соответствие между решетчатой
Символьная запись дискретного преобразования Лапласа
Дискретное преобразование Лапласа устанавливает соответствие между решетчатой
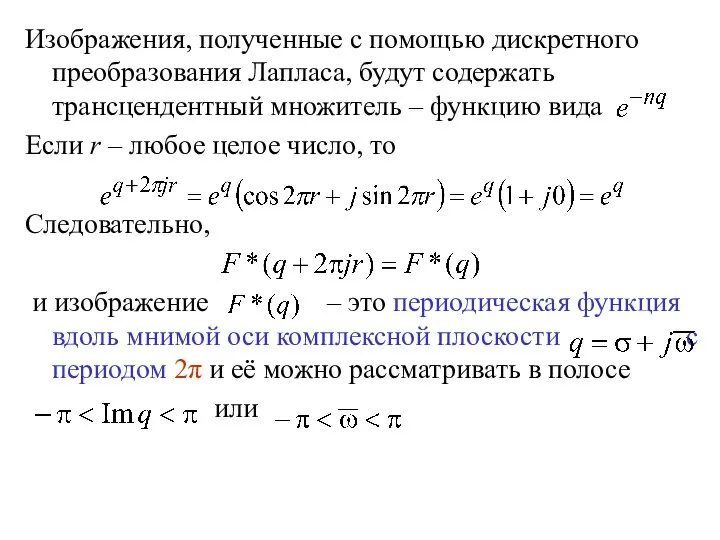
Изображения, полученные с помощью дискретного преобразования Лапласа, будут содержать трансцендентный множитель
Изображения, полученные с помощью дискретного преобразования Лапласа, будут содержать трансцендентный множитель
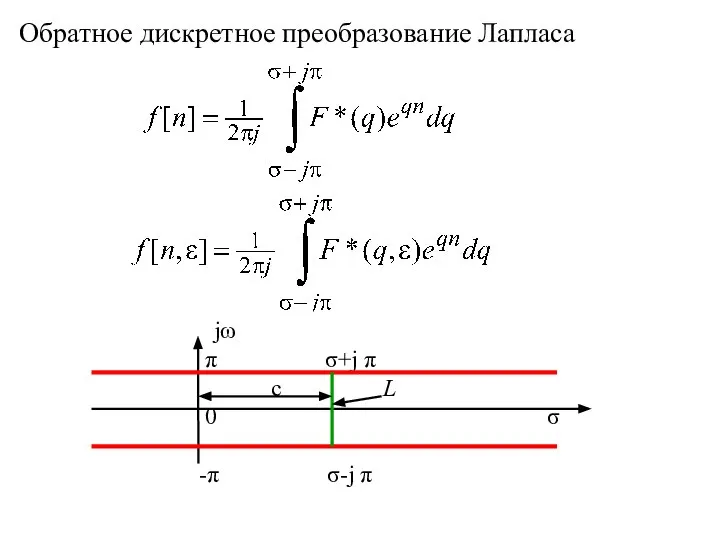
Обратное дискретное преобразование Лапласа
Обратное дискретное преобразование Лапласа
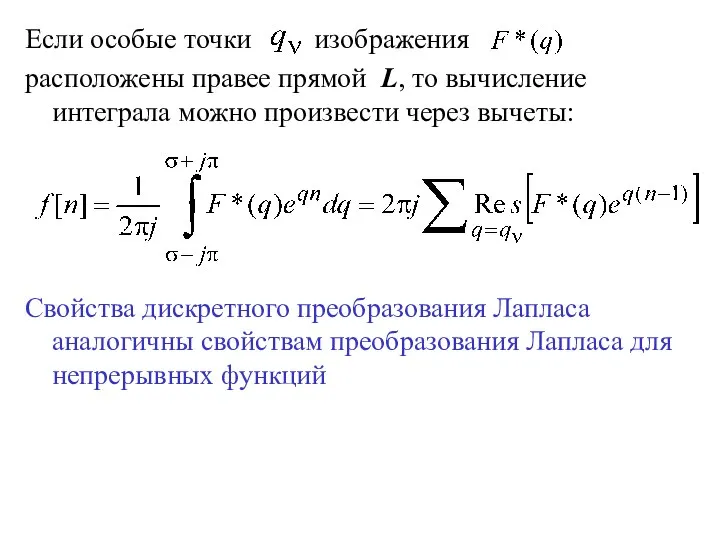
Если особые точки изображения
расположены правее прямой L, то вычисление интеграла
Если особые точки изображения
расположены правее прямой L, то вычисление интеграла
Z-преобразование
Под z-преобразованием понимают преобразование вила
или
Функции и можно рассматривать как главную
Z-преобразование
Под z-преобразованием понимают преобразование вила
или
Функции и можно рассматривать как главную
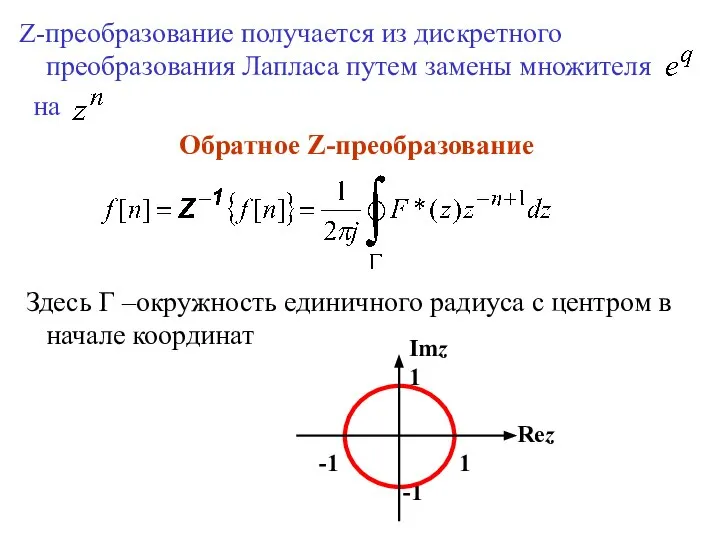
Z-преобразование получается из дискретного преобразования Лапласа путем замены множителя
на
Обратное Z-преобразование
Здесь
Z-преобразование получается из дискретного преобразования Лапласа путем замены множителя
на
Обратное Z-преобразование
Здесь
Передаточные функции разомкнутых систем с АИМ
Типовая структура разомкнутой САУ с
Передаточные функции разомкнутых систем с АИМ
Типовая структура разомкнутой САУ с
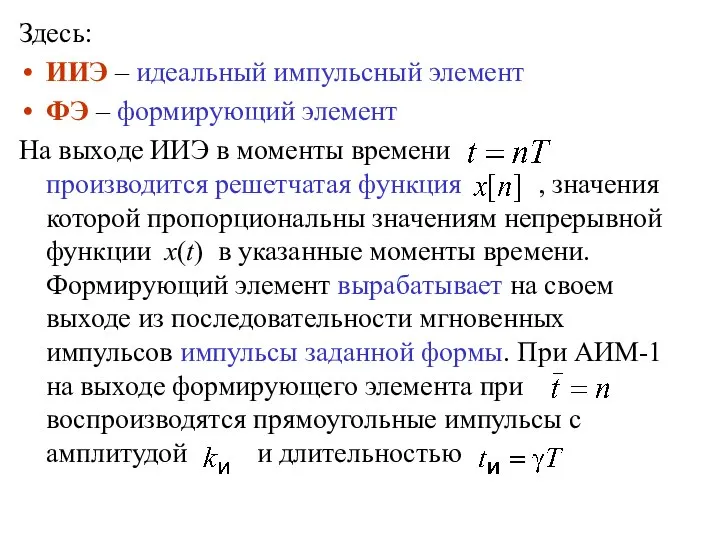
Здесь:
ИИЭ – идеальный импульсный элемент
ФЭ – формирующий элемент
На выходе ИИЭ в
Здесь:
ИИЭ – идеальный импульсный элемент
ФЭ – формирующий элемент
На выходе ИИЭ в
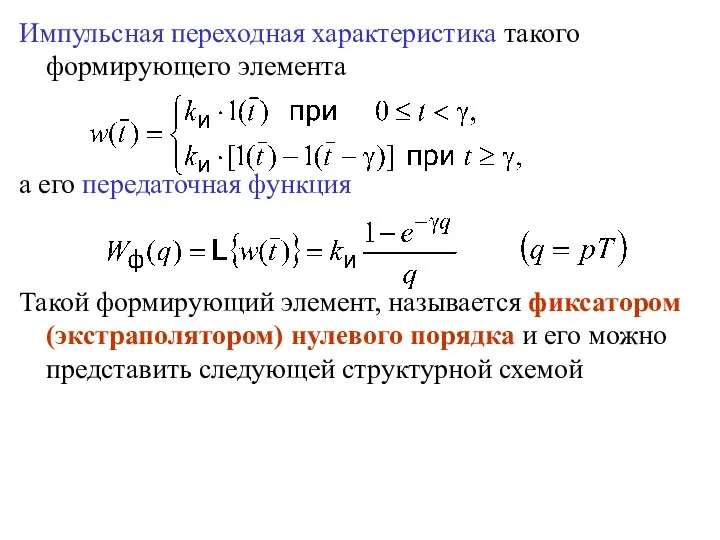
Импульсная переходная характеристика такого формирующего элемента
а его передаточная функция
Такой формирующий
Импульсная переходная характеристика такого формирующего элемента
а его передаточная функция
Такой формирующий
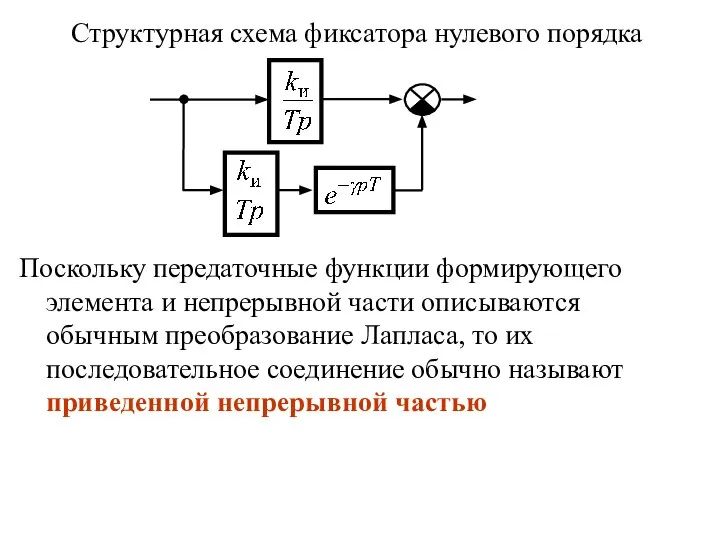
Структурная схема фиксатора нулевого порядка
Поскольку передаточные функции формирующего элемента и непрерывной
Структурная схема фиксатора нулевого порядка
Поскольку передаточные функции формирующего элемента и непрерывной
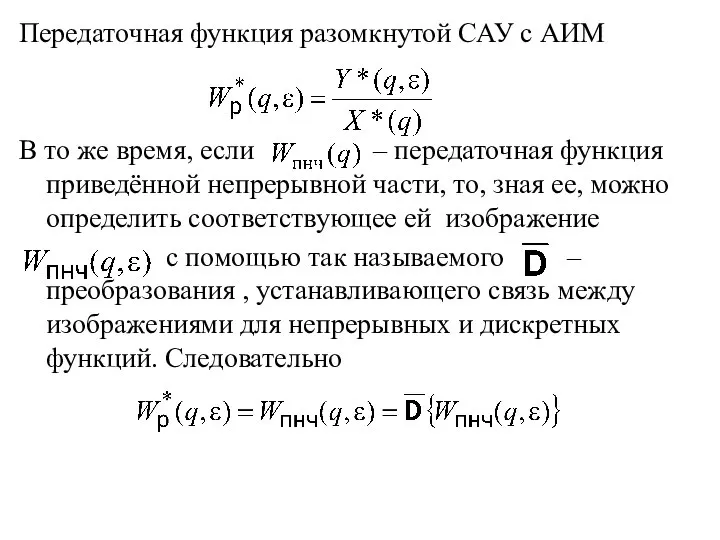
Передаточная функция разомкнутой САУ с АИМ
В то же время, если –
Передаточная функция разомкнутой САУ с АИМ
В то же время, если –
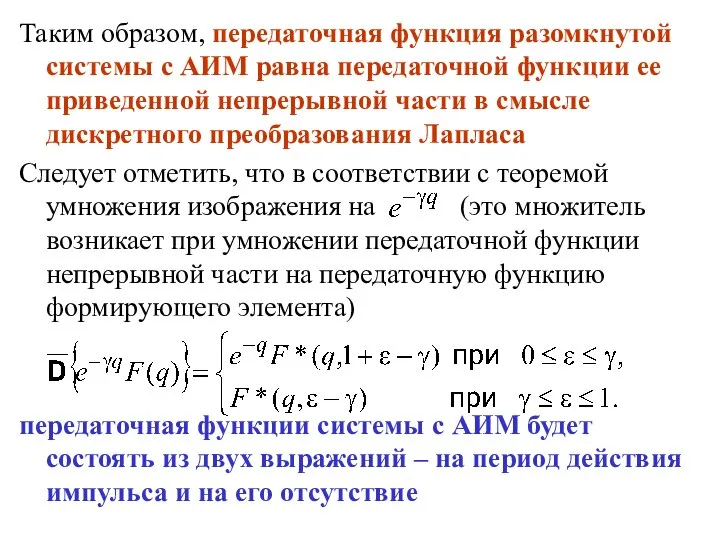
Таким образом, передаточная функция разомкнутой системы с АИМ равна передаточной функции
Таким образом, передаточная функция разомкнутой системы с АИМ равна передаточной функции
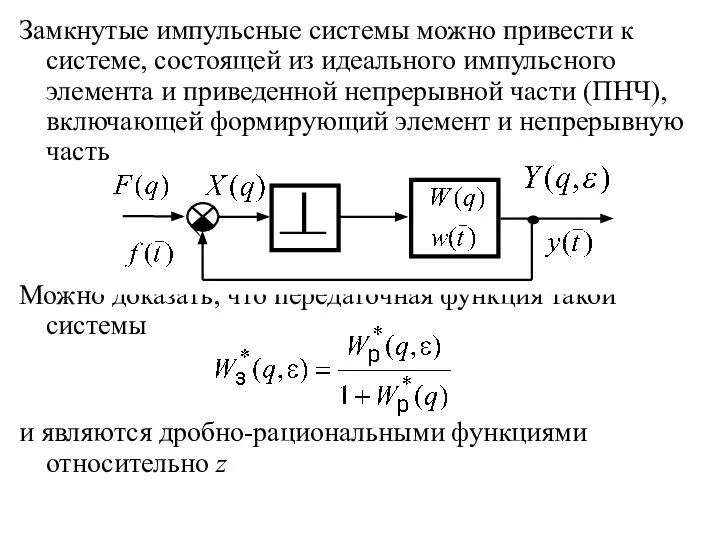
Замкнутые импульсные системы можно привести к системе, состоящей из идеального импульсного
Замкнутые импульсные системы можно привести к системе, состоящей из идеального импульсного
Частотные характеристики систем с АИМ
Поскольку изображение представляет собой периодическую функцию
Частотные характеристики систем с АИМ
Поскольку изображение представляет собой периодическую функцию
АФЧХ
т.е. частотные характеристики систем с АИМ являются периодическими функциями относительной частоты
АФЧХ
т.е. частотные характеристики систем с АИМ являются периодическими функциями относительной частоты
Другие свойства частотных характеристик САУ с АИМ:
Зависимость частотных характеристик от ,
Другие свойства частотных характеристик САУ с АИМ:
Зависимость частотных характеристик от ,
УСТОЙЧИВОСТЬ СИСТЕМ С АИМ
Функция , определяющая закон изменения выходной величины
УСТОЙЧИВОСТЬ СИСТЕМ С АИМ
Функция , определяющая закон изменения выходной величины
Составляющая
(*)
определяет характер переходного процесса и называется переходной составляющей
Если при
Составляющая
(*)
определяет характер переходного процесса и называется переходной составляющей
Если при
Очевидно, что, если полюсы передаточной функции замкнутой системы будут иметь отрицательные
Очевидно, что, если полюсы передаточной функции замкнутой системы будут иметь отрицательные
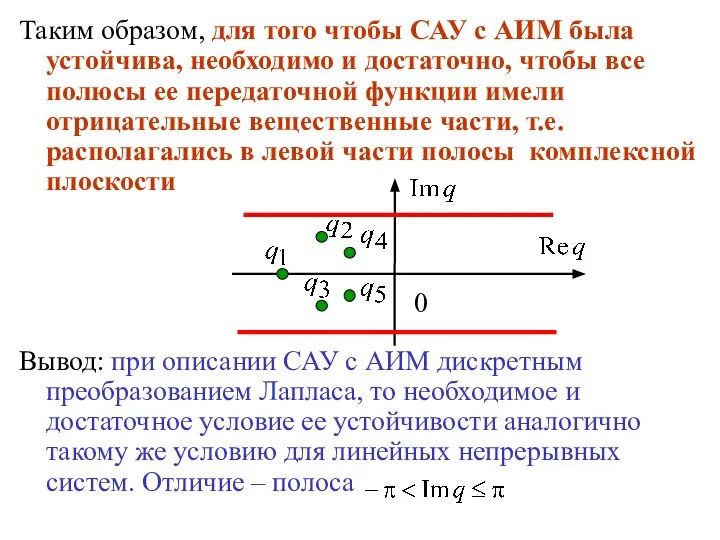
Таким образом, для того чтобы САУ с АИМ была устойчива, необходимо
Таким образом, для того чтобы САУ с АИМ была устойчива, необходимо
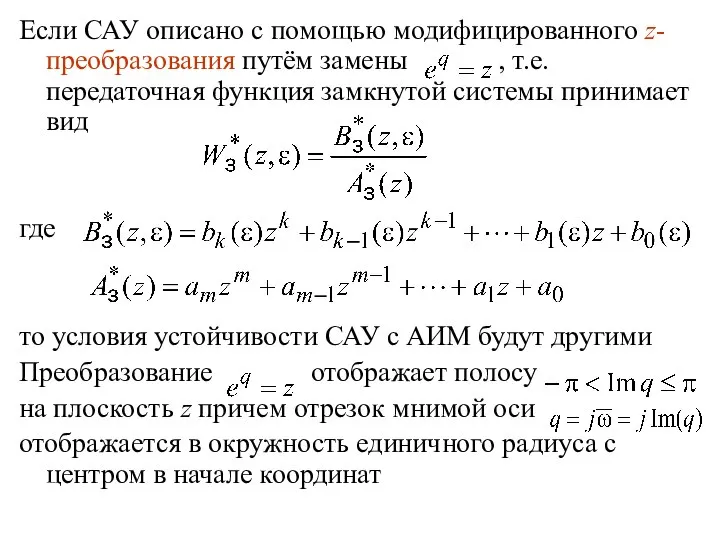
Если САУ описано с помощью модифицированного z-преобразования путём замены , т.е.
Если САУ описано с помощью модифицированного z-преобразования путём замены , т.е.
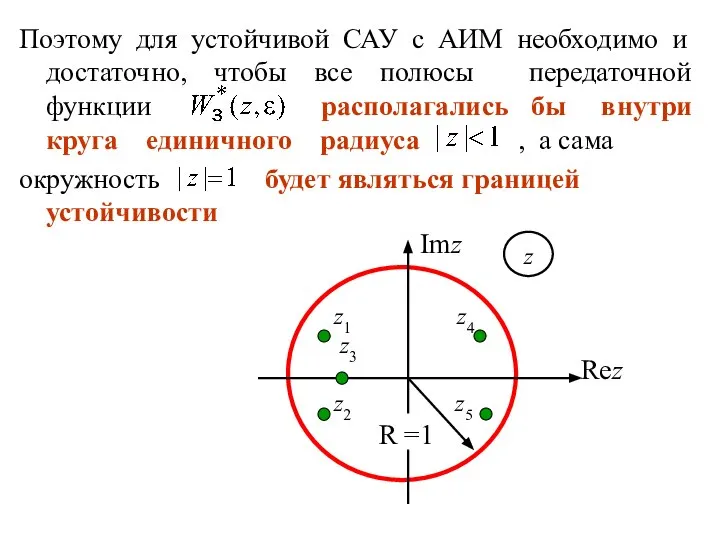
Поэтому для устойчивой САУ с АИМ необходимо и достаточно, чтобы все
Поэтому для устойчивой САУ с АИМ необходимо и достаточно, чтобы все
Анализ устойчивости систем с АИМ
Аналог критерия Гурвица
Применяется при описании САУ
Анализ устойчивости систем с АИМ
Аналог критерия Гурвица
Применяется при описании САУ
Тогда характеристически полином примет вид
или
где cj – постоянные коэффициенты
Замкнутая система с
Тогда характеристически полином примет вид
или
где cj – постоянные коэффициенты
Замкнутая система с
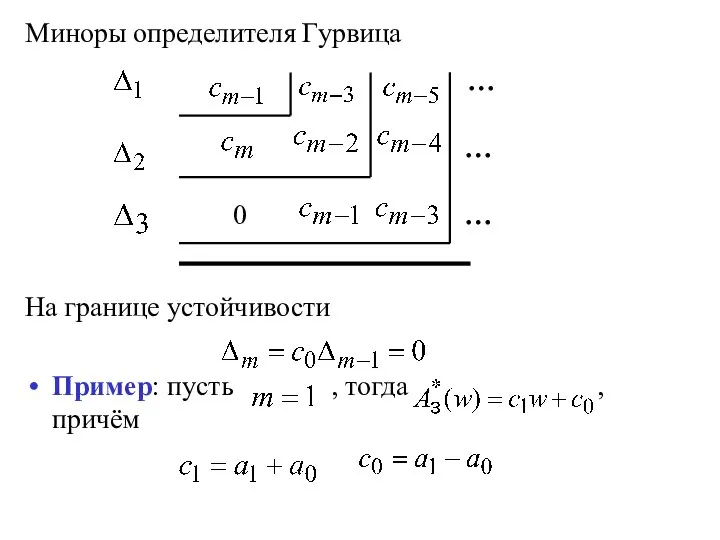
Миноры определителя Гурвица
На границе устойчивости
Пример: пусть , тогда , причём
Миноры определителя Гурвица
На границе устойчивости
Пример: пусть , тогда , причём
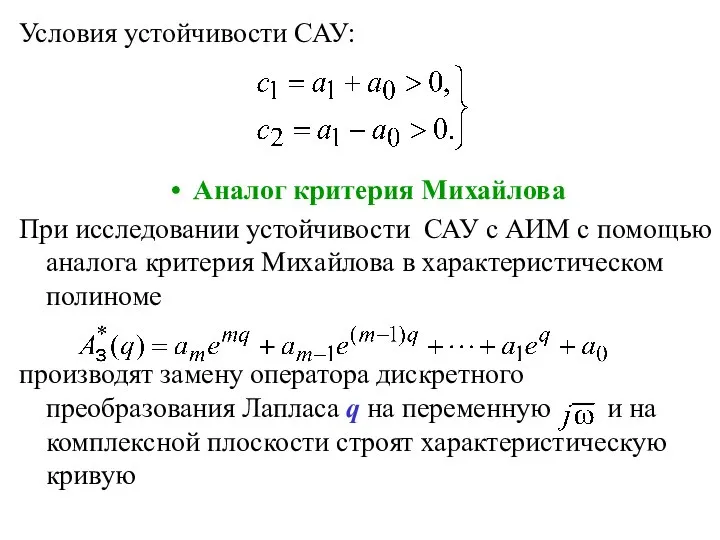
Условия устойчивости САУ:
Аналог критерия Михайлова
При исследовании устойчивости САУ с АИМ с
Условия устойчивости САУ:
Аналог критерия Михайлова
При исследовании устойчивости САУ с АИМ с
Замкнутая система с АИМ будет устойчива, если при возрастании от 0
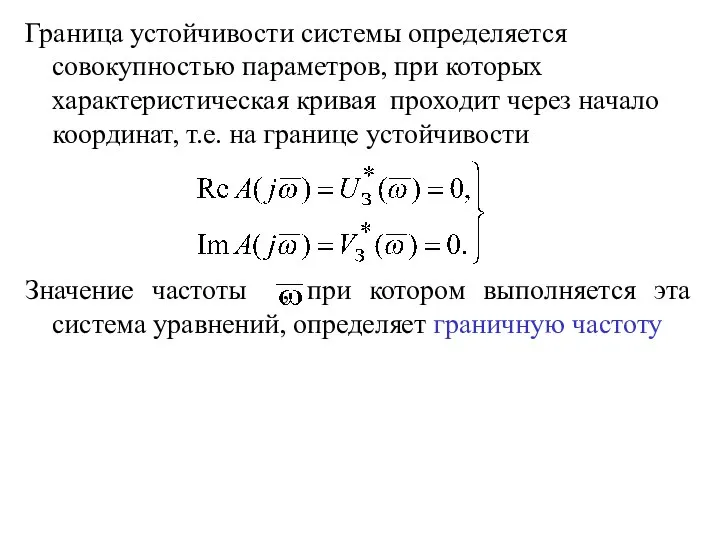
Граница устойчивости системы определяется совокупностью параметров, при которых характеристическая кривая проходит
Граница устойчивости системы определяется совокупностью параметров, при которых характеристическая кривая проходит
Аналог критерия Найквиста
Используется амплитудно-фазовая частотная характеристика (АФЧХ) разомкнутой системы
Критерий устойчивости
Аналог критерия Найквиста
Используется амплитудно-фазовая частотная характеристика (АФЧХ) разомкнутой системы
Критерий устойчивости
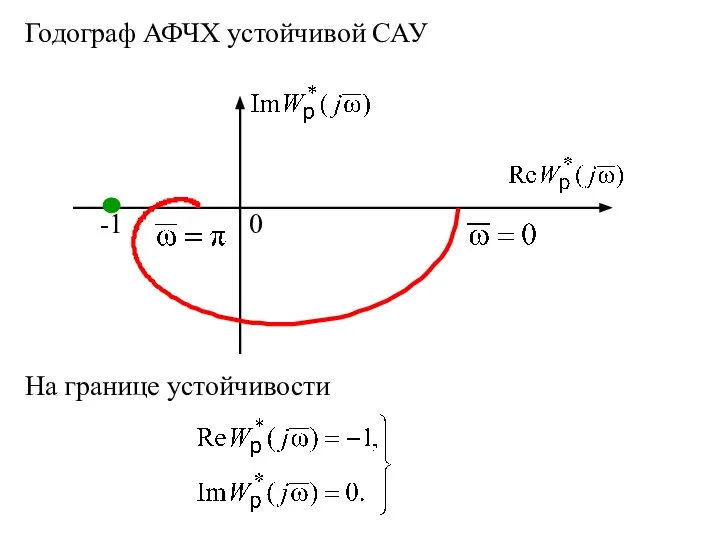
Годограф АФЧХ устойчивой САУ
На границе устойчивости
Годограф АФЧХ устойчивой САУ
На границе устойчивости
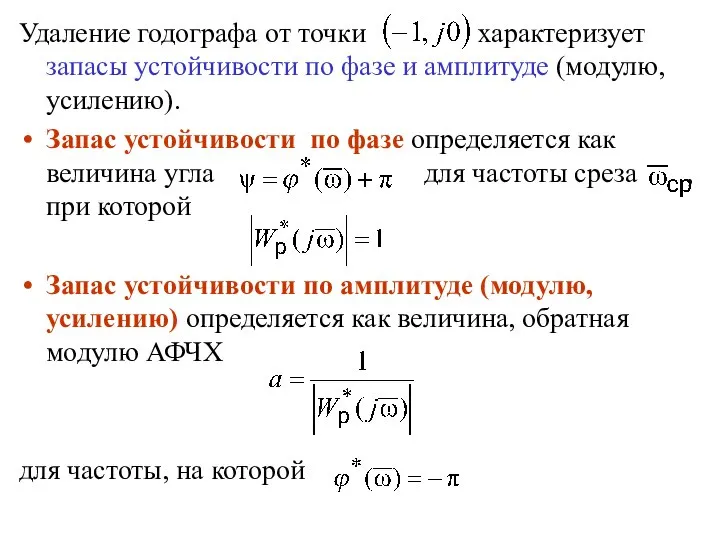
Удаление годографа от точки характеризует запасы устойчивости по фазе и амплитуде
Удаление годографа от точки характеризует запасы устойчивости по фазе и амплитуде
 VENTURE BUSINESS
VENTURE BUSINESS  Стекло
Стекло Педагогический совет 29.12.2007 Творчески работающий учитель-…
Педагогический совет 29.12.2007 Творчески работающий учитель-… Медицинская информатика и медицинская информация
Медицинская информатика и медицинская информация Антибиотика терапия грибковых заболеваний (на примере кандидамикоза)
Антибиотика терапия грибковых заболеваний (на примере кандидамикоза)  Энзиология
Энзиология  Правописание безударных личных окончаний глаголов - презентация для начальной школы
Правописание безударных личных окончаний глаголов - презентация для начальной школы Решение о стране происхождения товара Выполнили студенты ФТД-5 группы ДС-06 Лепичева Наталия Арутюнян Левон
Решение о стране происхождения товара Выполнили студенты ФТД-5 группы ДС-06 Лепичева Наталия Арутюнян Левон Презентация Приемы работы с пластилином
Презентация Приемы работы с пластилином  ВКР «Влияние занятий гимнастикой пилатес на развитие физических качеств, гибкости и силы у подростков 12-14 лет»
ВКР «Влияние занятий гимнастикой пилатес на развитие физических качеств, гибкости и силы у подростков 12-14 лет» Квазигеострофическая модель умеренных широт
Квазигеострофическая модель умеренных широт Концертная программа
Концертная программа Методы на языке С#
Методы на языке С# Презентация на тему "Современный УМК как средство опережающего развития школьников в условиях обновления содержания образован
Презентация на тему "Современный УМК как средство опережающего развития школьников в условиях обновления содержания образован Внеклассное занятие Внеклассное занятие Любимые сказки о животных.
Внеклассное занятие Внеклассное занятие Любимые сказки о животных. Щелочно-кислотное равновесие. Биохимия мочи.
Щелочно-кислотное равновесие. Биохимия мочи. Русский бидермейер
Русский бидермейер Партийная система Китайской Народной Республики
Партийная система Китайской Народной Республики Презентация ФСКН РФ
Презентация ФСКН РФ АЛГЕБРА 7 КЛАСС Решение систем линейных уравнений
АЛГЕБРА 7 КЛАСС Решение систем линейных уравнений Юридическая техника в Финляндии
Юридическая техника в Финляндии Либерализм, консерватизм, марксизм
Либерализм, консерватизм, марксизм Создание консольного приложения с текстовым меню
Создание консольного приложения с текстовым меню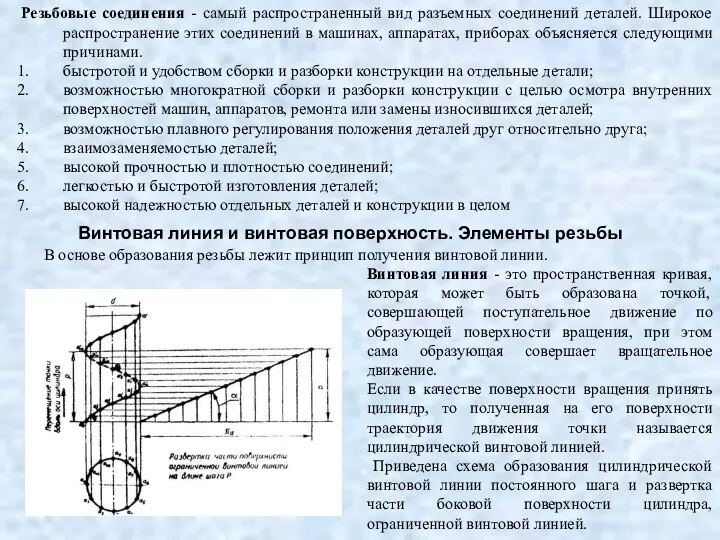 Резьбы
Резьбы Успешная рекомендация Вэлнэс
Успешная рекомендация Вэлнэс Система знаний о мире (в гипотезах, аксиомах, теоремах, законах, принципах, понятиях, теориях) Система знаний о мире (в гипотезах, ак
Система знаний о мире (в гипотезах, аксиомах, теоремах, законах, принципах, понятиях, теориях) Система знаний о мире (в гипотезах, ак Национальные символы весенних праздников
Национальные символы весенних праздников Иммунитет и здоровье
Иммунитет и здоровье