- Электроприводы с синхронными двигателями

Содержание
- 2. Типовые узлы схем автоматического управления синхронными двигателями Для синхронных двигателей всегда применяют асинхронный пуск. Таким образом,
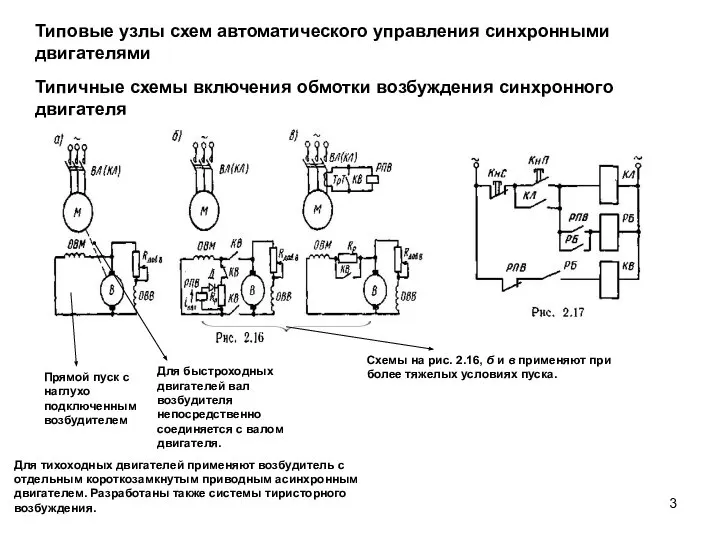
- 3. Типовые узлы схем автоматического управления синхронными двигателями Типичные схемы включения обмотки возбуждения синхронного двигателя Прямой пуск
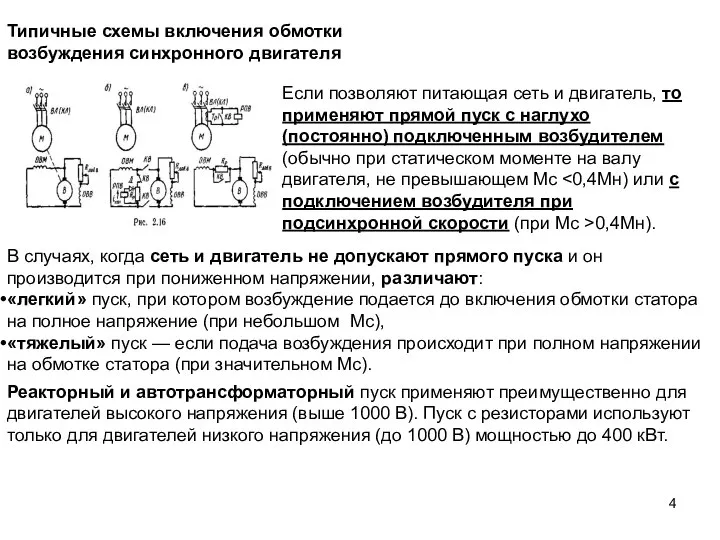
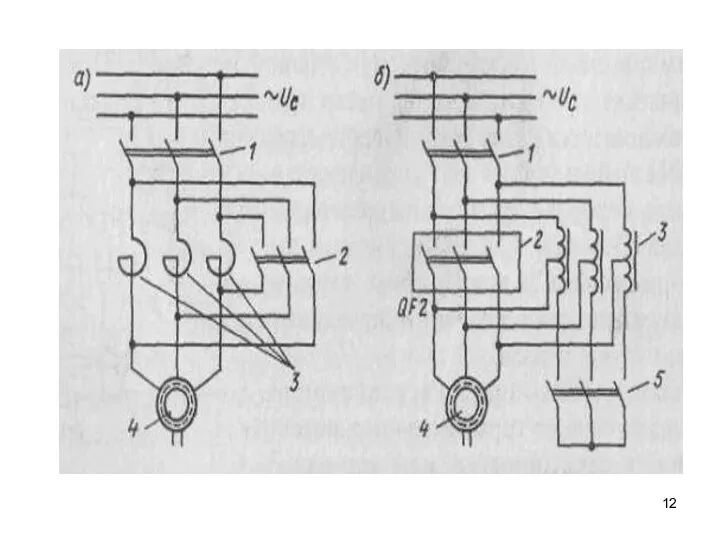
- 4. Типичные схемы включения обмотки возбуждения синхронного двигателя Если позволяют питающая сеть и двигатель, то применяют прямой
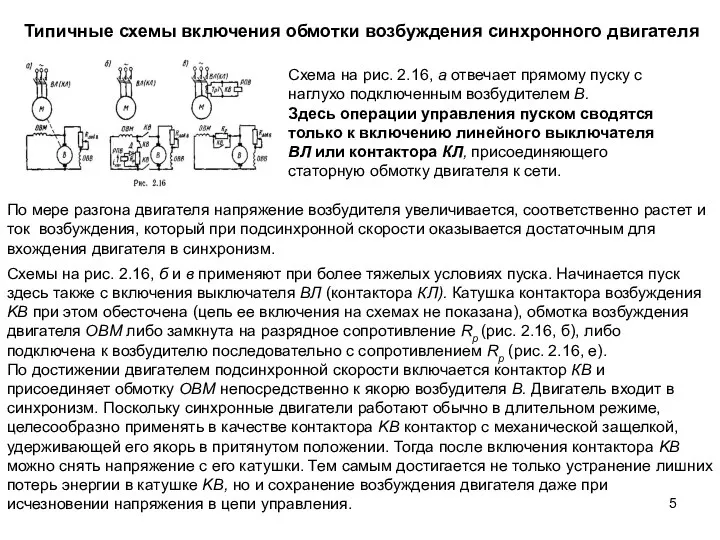
- 5. Типичные схемы включения обмотки возбуждения синхронного двигателя Схема на рис. 2.16, а отвечает прямому пуску с
- 6. Подачей возбуждения можно управлять в функции скорости (скольжения) или тока статора двигателя. Первый способ реализуют при
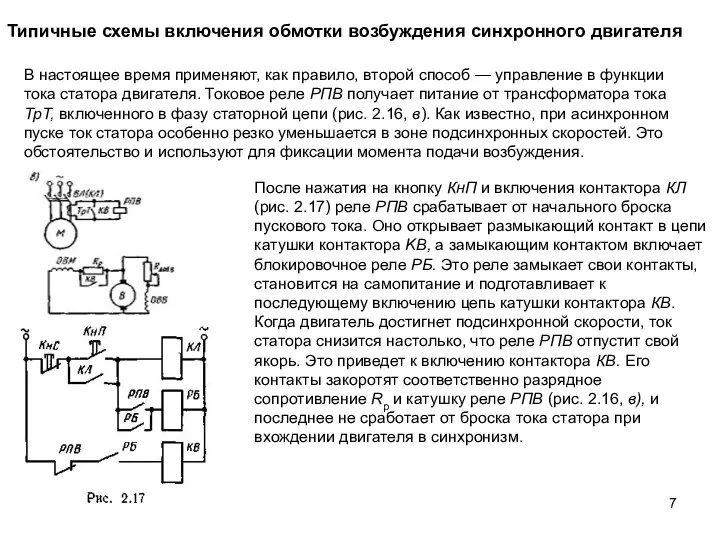
- 7. Типичные схемы включения обмотки возбуждения синхронного двигателя После нажатия на кнопку КнП и включения контактора КЛ
- 8. Схема включения, статические характеристики и режимы работы СД Вращающий момент СД обусловлен взаимодействием вращающегося магнитного поля,
- 9. Для определения максимального момента нагрузки Мmax, до которого сохраняется синхронная работа двигателя с сетью, служит угловая
- 10. Пуск синхронного двигателя Первая схема
- 11. Вторая схема
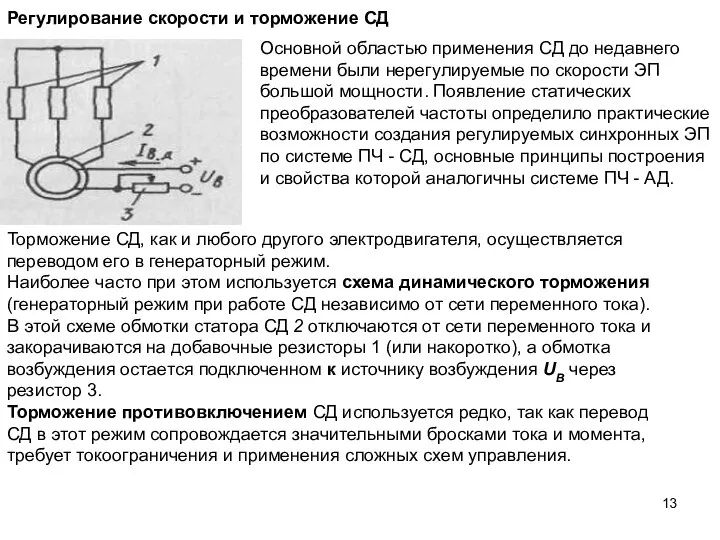
- 13. Регулирование скорости и торможение СД Основной областью применения СД до недавнего времени были нерегулируемые по скорости
- 14. I1(Iв) – ток статора в зависимости от тока возбуждения возбудителя ; 1, 2 – графики I1(Iв)
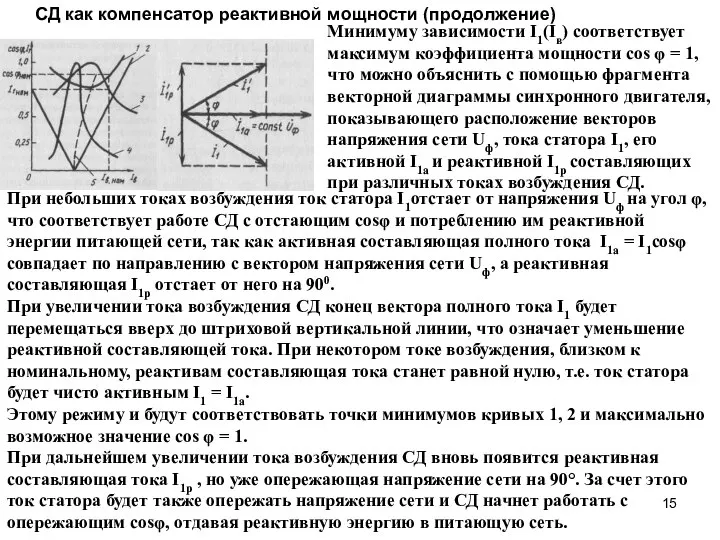
- 15. СД как компенсатор реактивной мощности (продолжение) Минимуму зависимости I1(Iв) соответствует максимум коэффициента мощности cos φ =
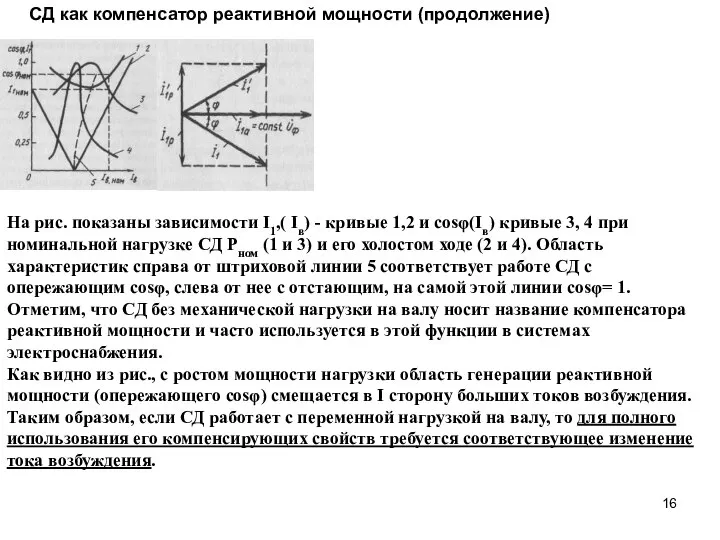
- 16. СД как компенсатор реактивной мощности (продолжение) На рис. показаны зависимости I1,( Iв) - кривые 1,2 и
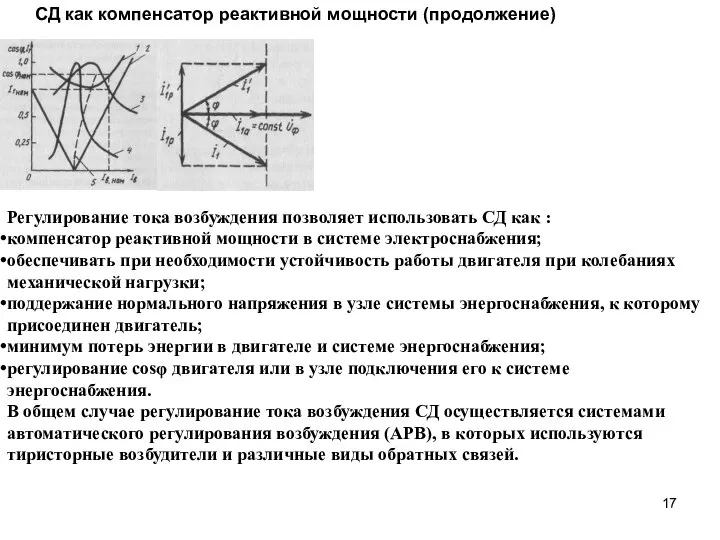
- 17. СД как компенсатор реактивной мощности (продолжение) Регулирование тока возбуждения позволяет использовать СД как : компенсатор реактивной
- 18. Переходные процессы СД
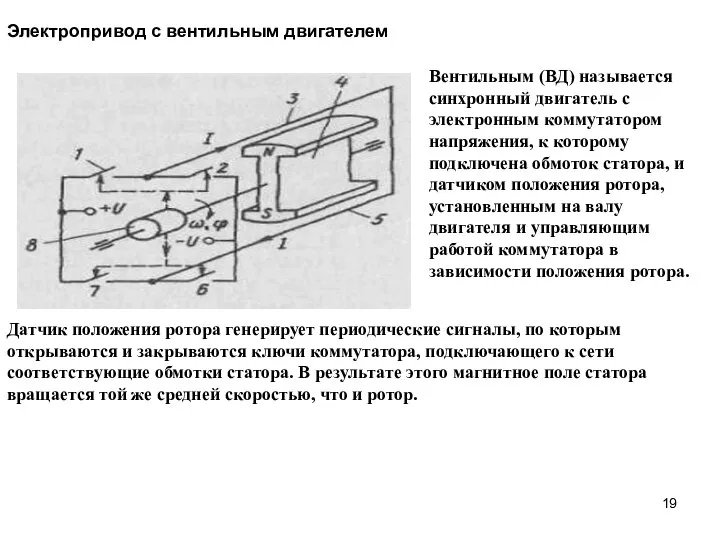
- 19. Вентильным (ВД) называется синхронный двигатель с электронным коммутатором напряжения, к которому подключена обмоток статора, и датчиком
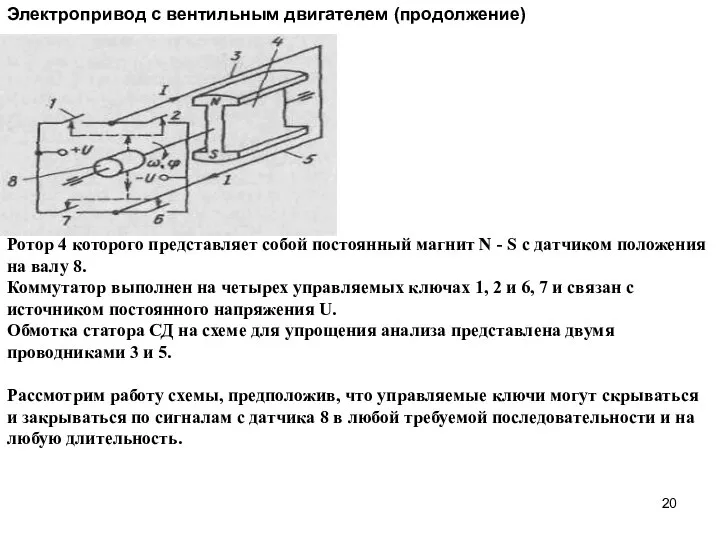
- 20. Рассмотрим принцип действия ВД. Ротор 4 которого представляет собой постоянный магнит N - S с датчиком
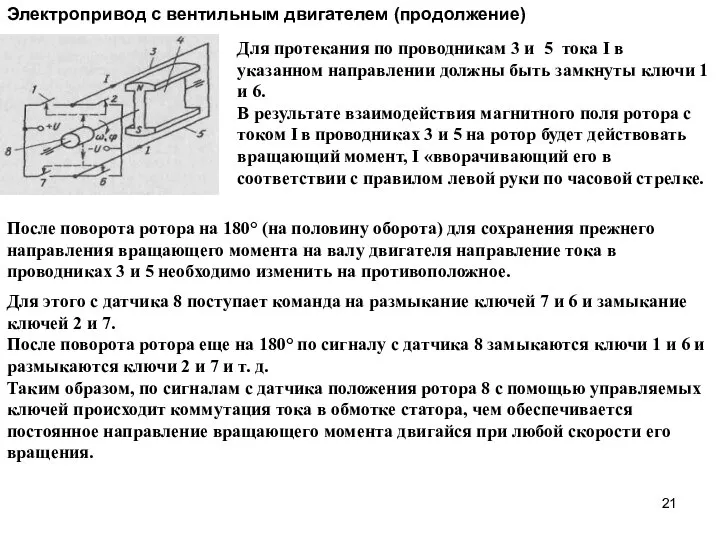
- 21. Для этого с датчика 8 поступает команда на размыкание ключей 7 и 6 и замыкание ключей
- 22. Электропривод с вентильным двигателем (продолжение) Нетрудно заметить, что ВД по принципу своего действия аналогичен двигателю постоянного
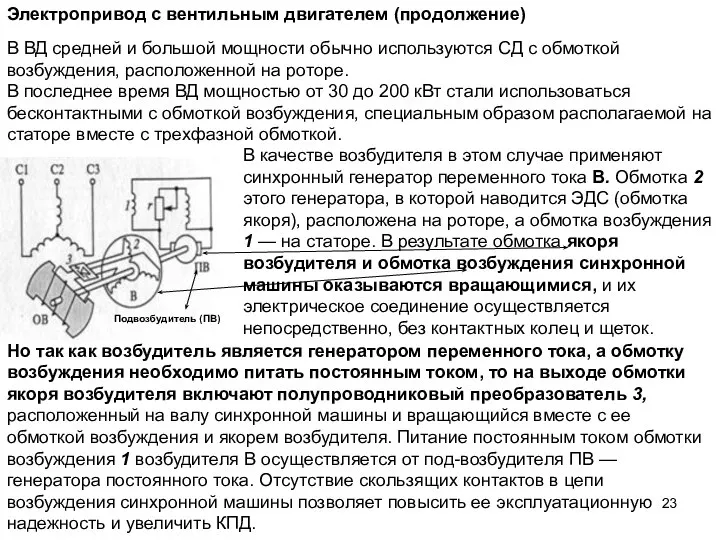
- 23. Электропривод с вентильным двигателем (продолжение) В ВД средней и большой мощности обычно используются СД с обмоткой
- 24. Обмотка возбуждения в этом случае усиливает магнитный поток и тем самым увеличивает вращающий момент двигателя. Коммутатор
- 25. ВД с искусственной коммутацией
- 26. ЭП с шаговым двигателем
- 27. Переходный процесс при отработке трех импульсов управления
- 28. Схемы управления
- 30. Скачать презентацию
Типовые узлы схем автоматического управления синхронными двигателями
Для синхронных двигателей всегда применяют
Типовые узлы схем автоматического управления синхронными двигателями
Для синхронных двигателей всегда применяют
Типовые узлы схем автоматического управления синхронными двигателями
Типичные схемы включения обмотки
Типовые узлы схем автоматического управления синхронными двигателями
Типичные схемы включения обмотки
Типичные схемы включения обмотки возбуждения синхронного двигателя
Если позволяют питающая сеть
Типичные схемы включения обмотки возбуждения синхронного двигателя
Если позволяют питающая сеть
Типичные схемы включения обмотки возбуждения синхронного двигателя
Схема на рис. 2.16,
Типичные схемы включения обмотки возбуждения синхронного двигателя
Схема на рис. 2.16,
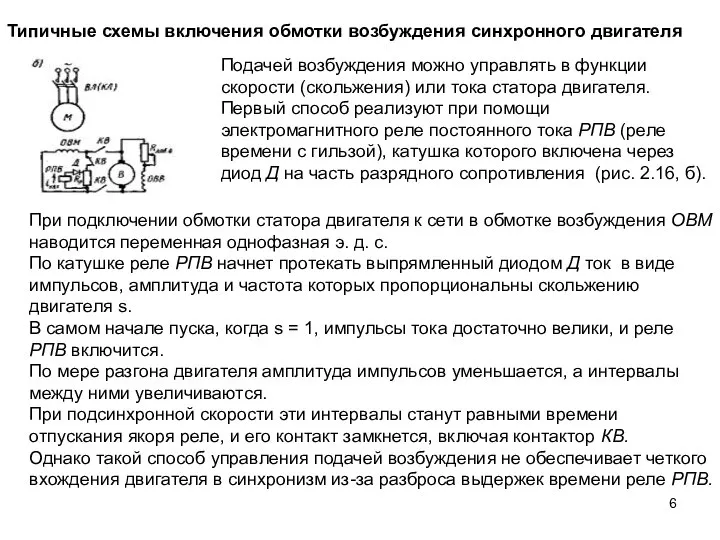
Подачей возбуждения можно управлять в функции скорости (скольжения) или тока статора
Подачей возбуждения можно управлять в функции скорости (скольжения) или тока статора
Типичные схемы включения обмотки возбуждения синхронного двигателя
После нажатия на кнопку
Типичные схемы включения обмотки возбуждения синхронного двигателя
После нажатия на кнопку
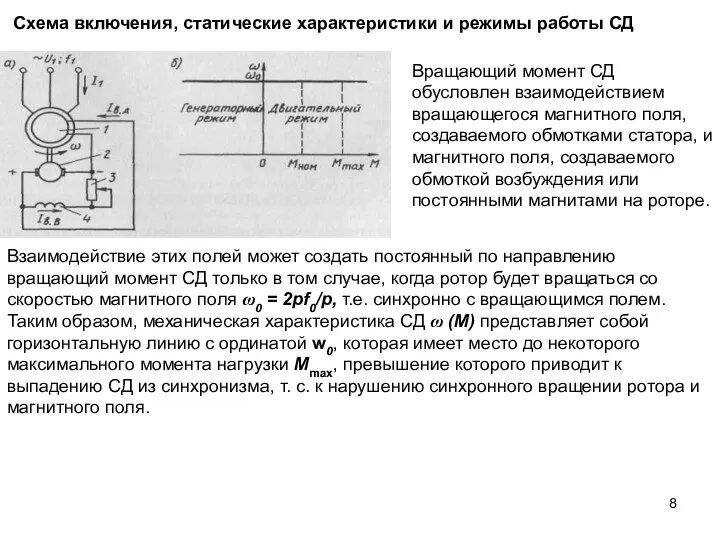
Схема включения, статические характеристики и режимы работы СД
Вращающий момент СД обусловлен
Схема включения, статические характеристики и режимы работы СД
Вращающий момент СД обусловлен
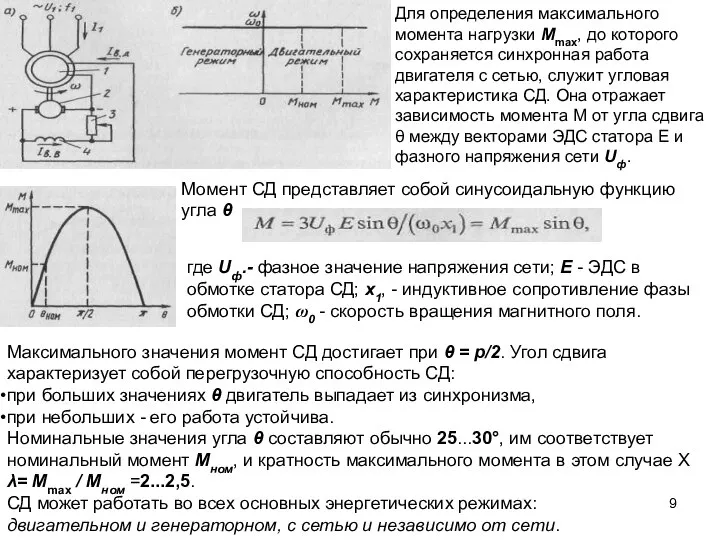
Для определения максимального момента нагрузки Мmax, до которого сохраняется синхронная работа
Для определения максимального момента нагрузки Мmax, до которого сохраняется синхронная работа
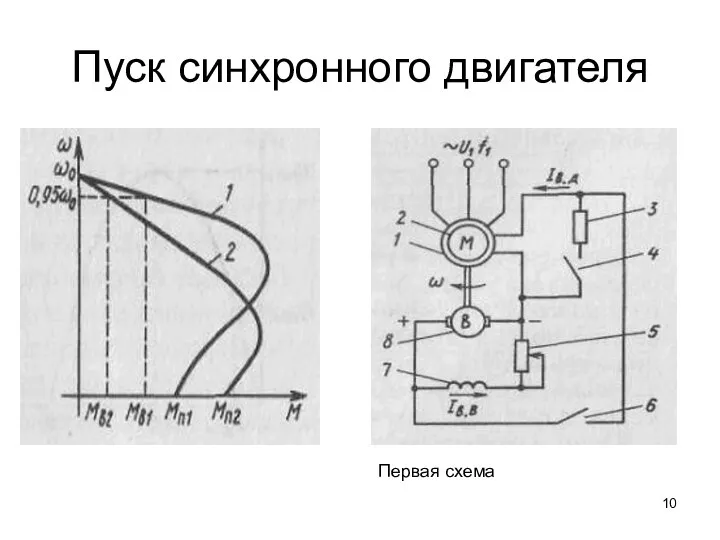
Пуск синхронного двигателя
Первая схема
Пуск синхронного двигателя
Первая схема
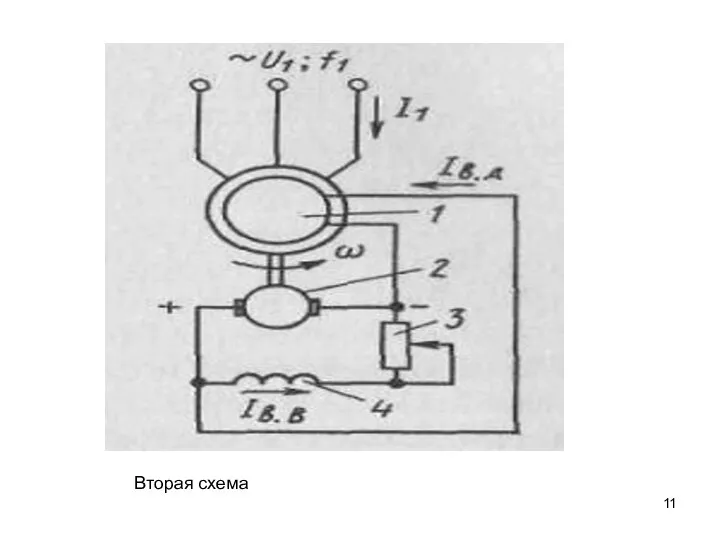
Вторая схема
Вторая схема
Регулирование скорости и торможение СД
Основной областью применения СД до недавнего времени
Регулирование скорости и торможение СД
Основной областью применения СД до недавнего времени
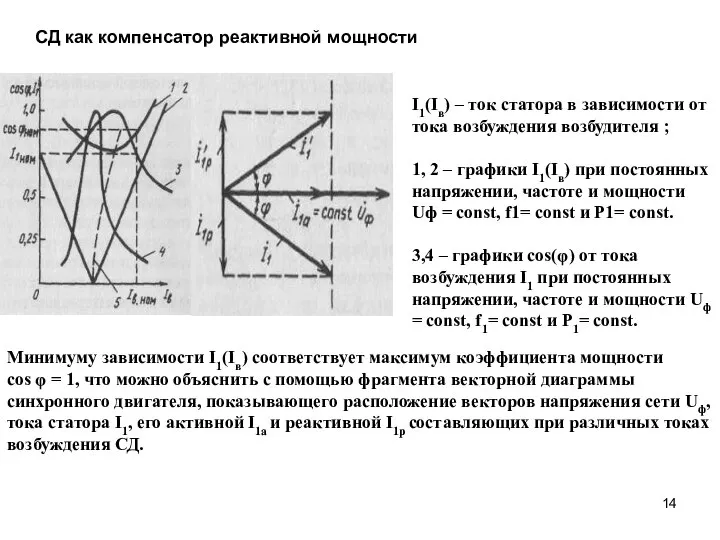
I1(Iв) – ток статора в зависимости от тока возбуждения возбудителя ;
1,
I1(Iв) – ток статора в зависимости от тока возбуждения возбудителя ;
1,
СД как компенсатор реактивной мощности (продолжение)
Минимуму зависимости I1(Iв) соответствует максимум коэффициента
СД как компенсатор реактивной мощности (продолжение)
Минимуму зависимости I1(Iв) соответствует максимум коэффициента
СД как компенсатор реактивной мощности (продолжение)
На рис. показаны зависимости I1,( Iв)
СД как компенсатор реактивной мощности (продолжение)
На рис. показаны зависимости I1,( Iв)
СД как компенсатор реактивной мощности (продолжение)
Регулирование тока возбуждения позволяет использовать СД
СД как компенсатор реактивной мощности (продолжение)
Регулирование тока возбуждения позволяет использовать СД

Переходные процессы СД
Переходные процессы СД
Вентильным (ВД) называется синхронный двигатель с электронным коммутатором напряжения, к которому
Вентильным (ВД) называется синхронный двигатель с электронным коммутатором напряжения, к которому
Рассмотрим принцип действия ВД.
Ротор 4 которого представляет собой постоянный магнит
Рассмотрим принцип действия ВД.
Ротор 4 которого представляет собой постоянный магнит
Для этого с датчика 8 поступает команда на размыкание ключей 7
Для этого с датчика 8 поступает команда на размыкание ключей 7
Электропривод с вентильным двигателем (продолжение)
Нетрудно заметить, что ВД по принципу своего
Электропривод с вентильным двигателем (продолжение)
Нетрудно заметить, что ВД по принципу своего
Электропривод с вентильным двигателем (продолжение)
В ВД средней и большой мощности обычно
Электропривод с вентильным двигателем (продолжение)
В ВД средней и большой мощности обычно
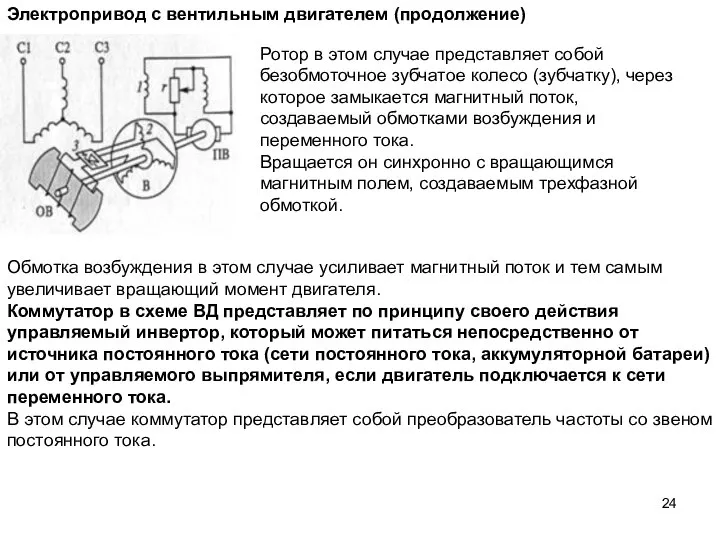
Обмотка возбуждения в этом случае усиливает магнитный поток и тем самым
Обмотка возбуждения в этом случае усиливает магнитный поток и тем самым
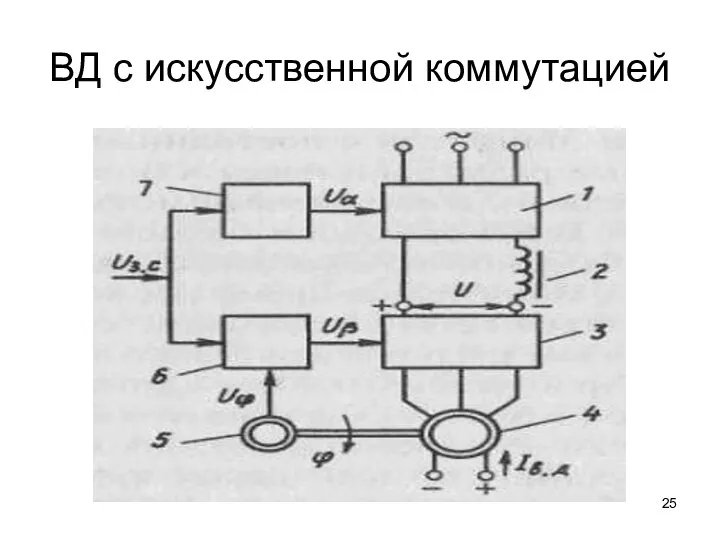
ВД с искусственной коммутацией
ВД с искусственной коммутацией
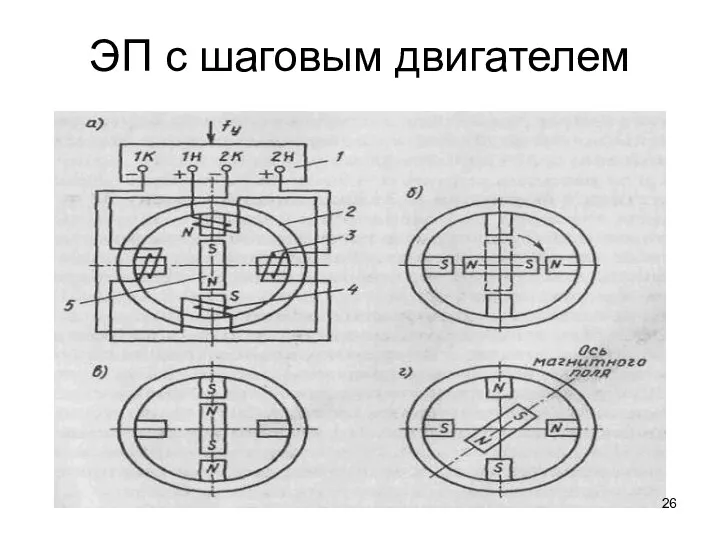
ЭП с шаговым двигателем
ЭП с шаговым двигателем
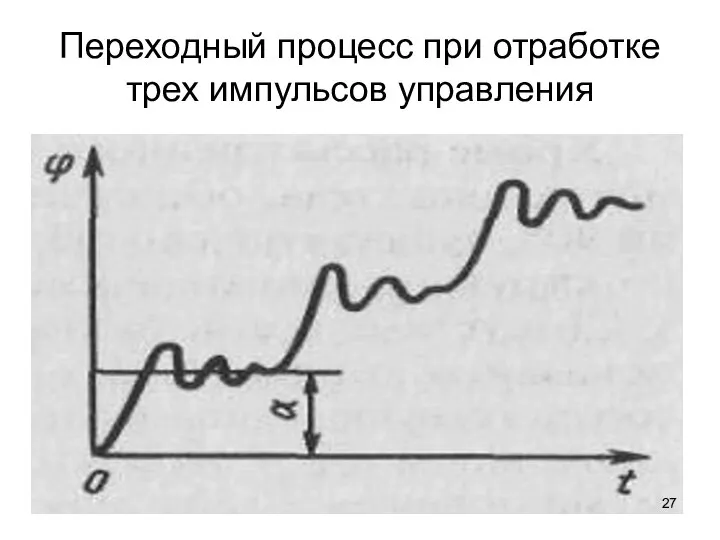
Переходный процесс при отработке трех импульсов управления
Переходный процесс при отработке трех импульсов управления
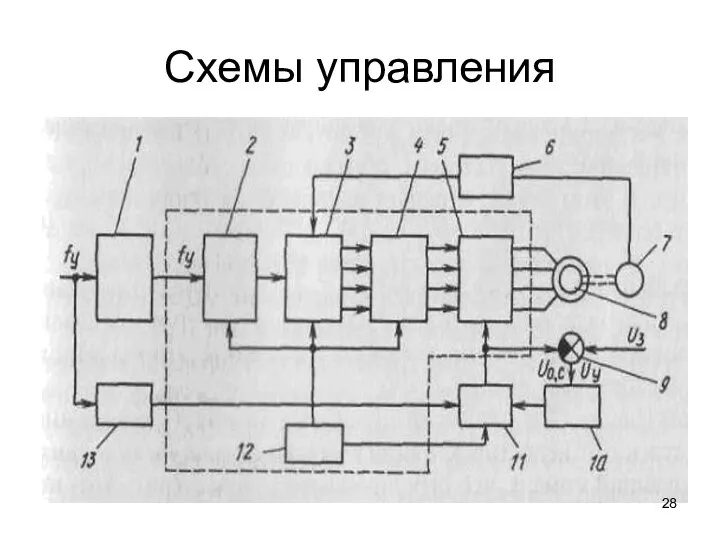
Схемы управления
Схемы управления
 Художественная культура России в XVII веке
Художественная культура России в XVII веке Загальні відомості про доїння
Загальні відомості про доїння Технология создания Web-страниц. Интернет и WWW. Язык HTML. Выход
Технология создания Web-страниц. Интернет и WWW. Язык HTML. Выход Рак прямой кишки
Рак прямой кишки Відновлення деталей спеціальними способами зварювання і наплавлення
Відновлення деталей спеціальними способами зварювання і наплавлення Однофазные цепи синусоидального тока
Однофазные цепи синусоидального тока Презентация ИСТОРИЯ КОСТЮМА
Презентация ИСТОРИЯ КОСТЮМА  Рефлексия в обучении. Лекция 17
Рефлексия в обучении. Лекция 17 Размещение, укладка и крепление скоропортящихся грузов в вагонах и контейнерах
Размещение, укладка и крепление скоропортящихся грузов в вагонах и контейнерах  АКТИВНЫЙ ТРАНСПОРТ
АКТИВНЫЙ ТРАНСПОРТ Презентация на тему "Система работы с одарёнными детьми" - скачать презентации по Педагогике
Презентация на тему "Система работы с одарёнными детьми" - скачать презентации по Педагогике Бершадська загальноосвітня школа І-ІІІ ступенів №3 Початкова школа
Бершадська загальноосвітня школа І-ІІІ ступенів №3 Початкова школа Командная игра ринго
Командная игра ринго Пересечение поверхности плоскостью
Пересечение поверхности плоскостью «Особенности деятельности психологической службы образования образовательного учреждения, направленной на профилактику праона
«Особенности деятельности психологической службы образования образовательного учреждения, направленной на профилактику праона Виды передач в робототехнике
Виды передач в робототехнике Дизайн спортивных автомобилей
Дизайн спортивных автомобилей Раскрытие творческого потенциала для поиска и самовыражения одаренных детей .
Раскрытие творческого потенциала для поиска и самовыражения одаренных детей . Приоритетные задачи ГТО
Приоритетные задачи ГТО Suomen kielen tunnit 6 а
Suomen kielen tunnit 6 а Планшетные сканеры. Устройство, работа, характеристики
Планшетные сканеры. Устройство, работа, характеристики Организация системы ПОД/ФТ в банке
Организация системы ПОД/ФТ в банке грудная кл
грудная кл Bars-prodaction
Bars-prodaction Визитка - презентация для начальной школы_
Визитка - презентация для начальной школы_ Массивы (язык C, лекция 5)
Массивы (язык C, лекция 5) Типология культуры
Типология культуры Кроссворд на тему Средневековая Философия
Кроссворд на тему Средневековая Философия