- EV3 Мастер класс «Робот исследователь»

Содержание
- 2. EV3 Мастер класс «Робот исследователь»
- 3. Правила Соблюдаем тишину, когда преподаватель говорит Непонятно – спроси! Наборы не смешивать, все складывать на место
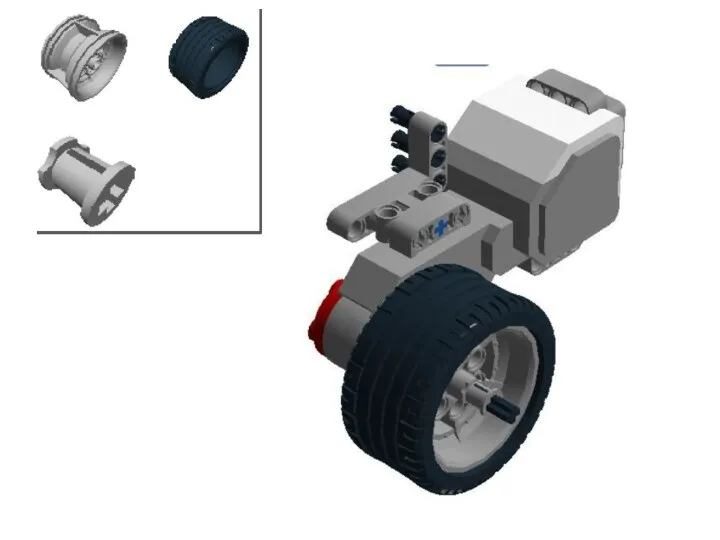
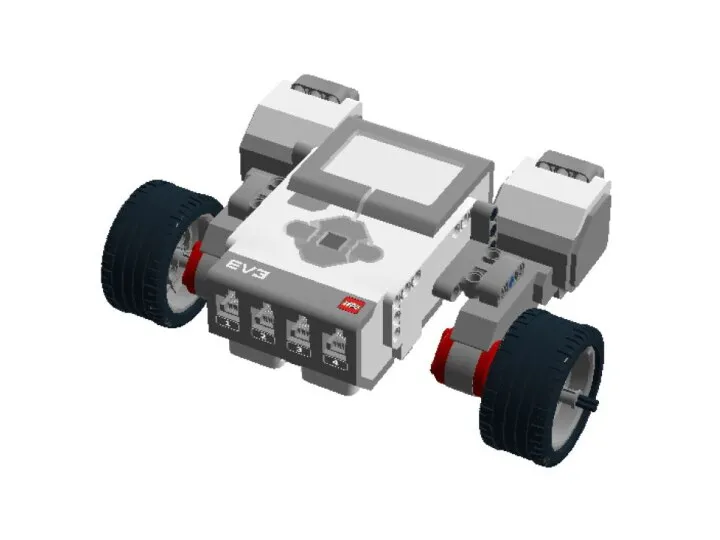
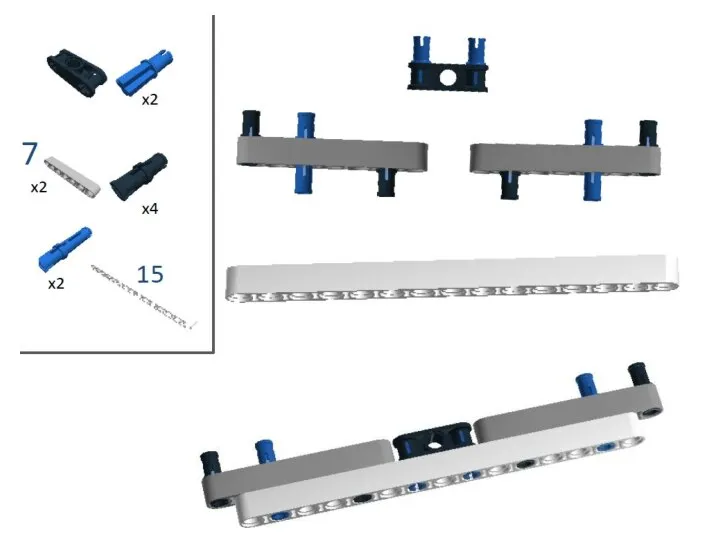
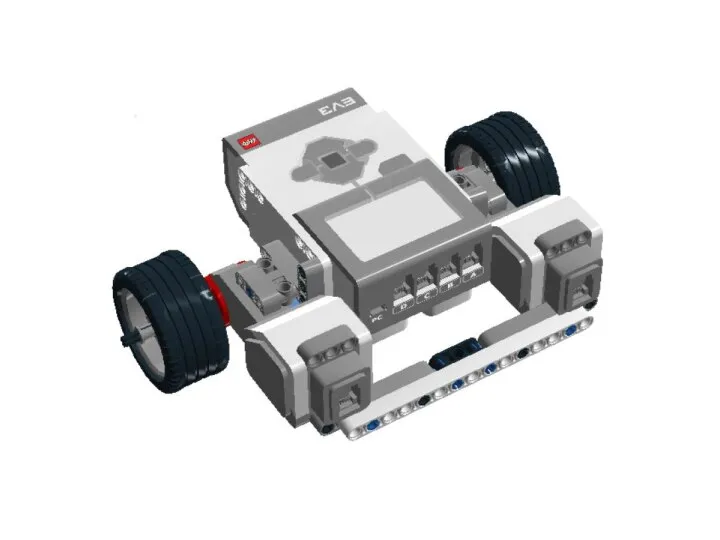
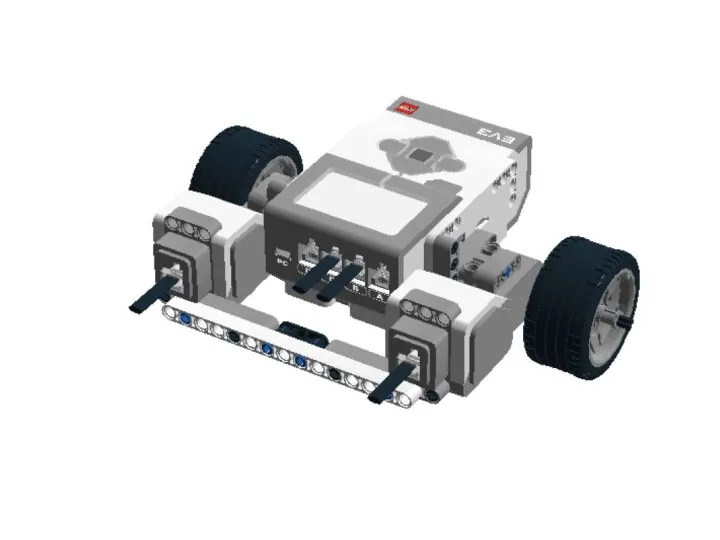
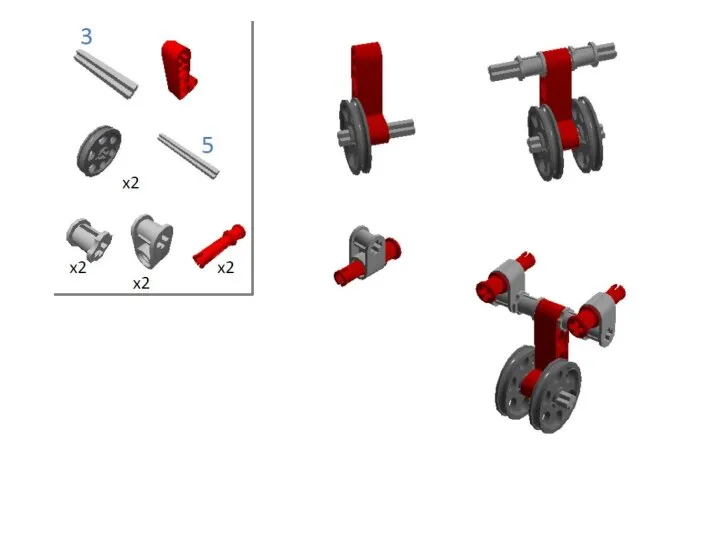
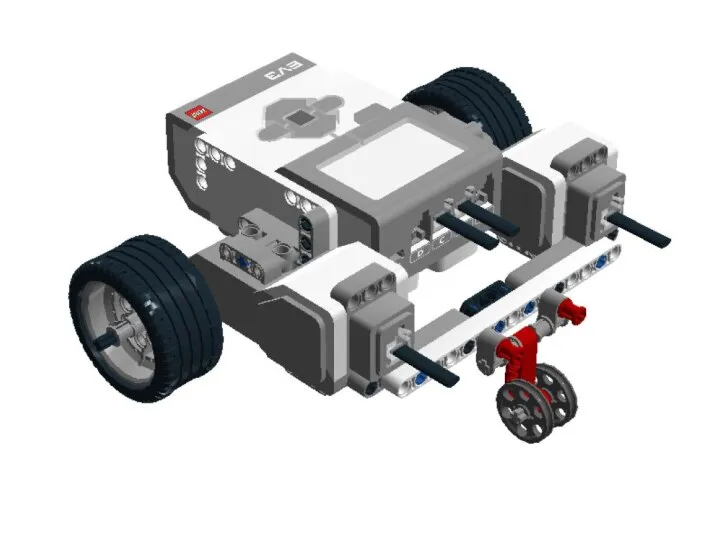
- 5. Сборка
- 16. Программирование Управление моторами:
- 17. В чем разница между блоками «Рулевое управление» и «Независимое управление моторами» ?
- 18. Задача: Проехать вперед в течении 3 секунд. Программирование 1) Самостоятельная задача: Проехать вперед в течении 2
- 19. Решение: Программирование 2) Самостоятельная задача: Ездить по квадрату бесконечно.
- 20. Программирование Решение: Параметры блоков не отрегулированы, для езды именно по квадрату необходимо их подбирать опытным путем.
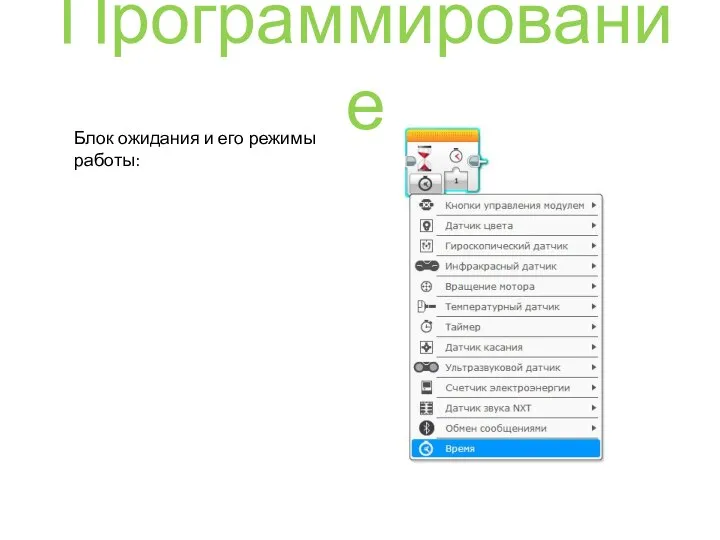
- 21. Программирование Блок ожидания и его режимы работы:
- 22. Программирование
- 23. Задача: ждать пока не появится препятствие на расстоянии Программирование 3) Самостоятельная задача : запрограммировать «любопытного робота»
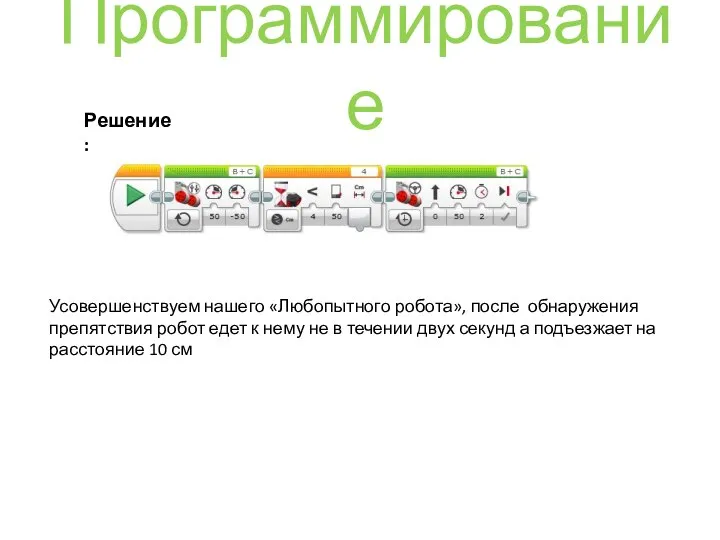
- 24. Программирование Усовершенствуем нашего «Любопытного робота», после обнаружения препятствия робот едет к нему не в течении двух
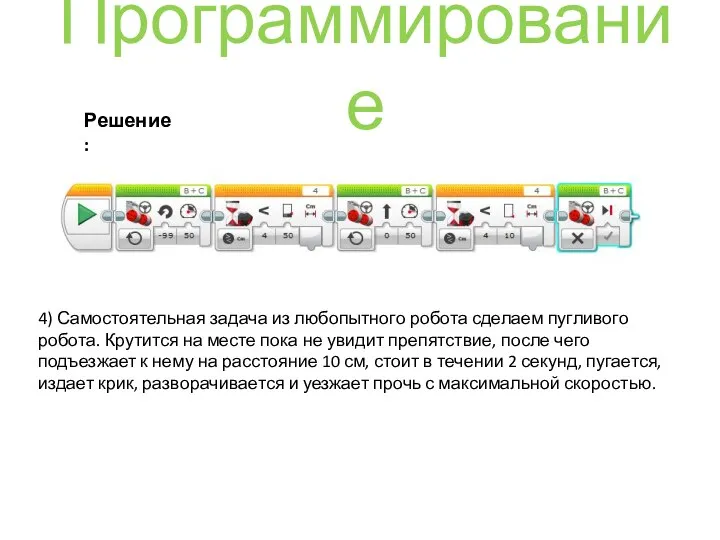
- 25. Программирование Решение: 4) Самостоятельная задача из любопытного робота сделаем пугливого робота. Крутится на месте пока не
- 26. Программирование Решение: 4) Самостоятельная задача из любопытного робота сделаем пугливого робота. Крутится на месте пока не
- 27. Программирование Решение:
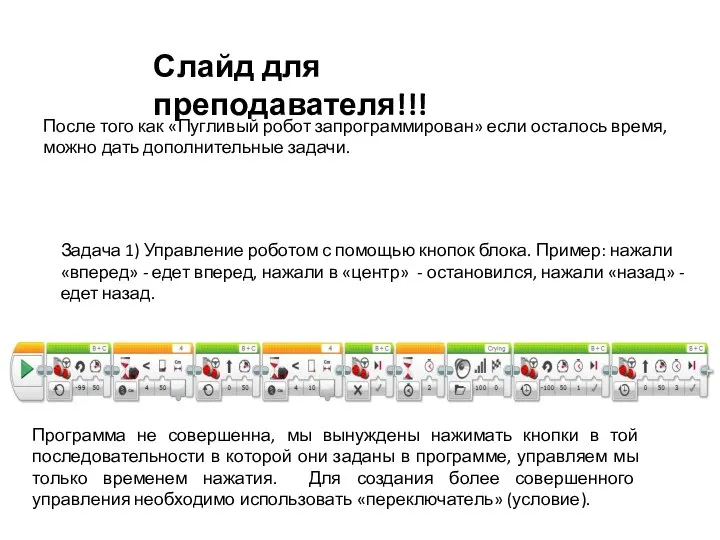
- 28. Слайд для преподавателя!!! После того как «Пугливый робот запрограммирован» если осталось время, можно дать дополнительные задачи.
- 30. Скачать презентацию
EV3
Мастер класс
«Робот исследователь»
EV3
Мастер класс
«Робот исследователь»
Правила
Соблюдаем тишину, когда преподаватель говорит
Непонятно – спроси!
Наборы не смешивать, все складывать
Правила
Соблюдаем тишину, когда преподаватель говорит
Непонятно – спроси!
Наборы не смешивать, все складывать


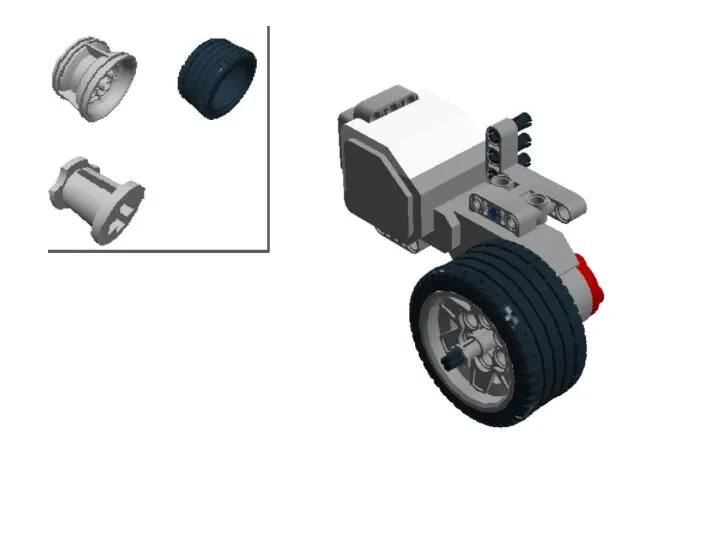
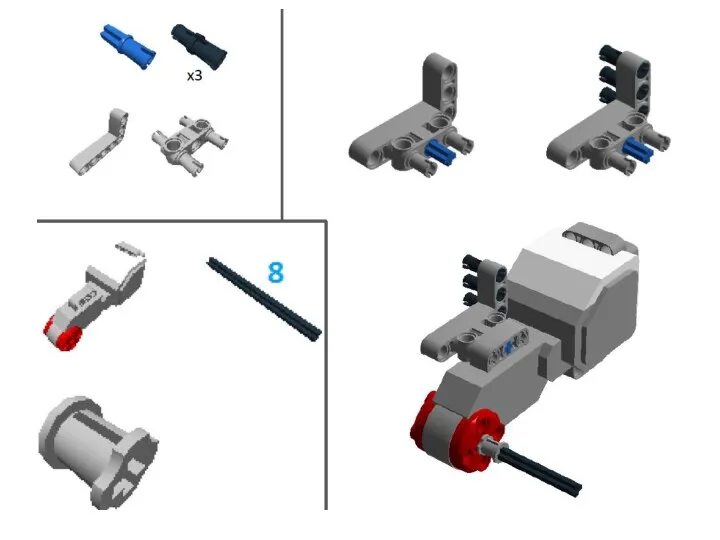
Сборка
Сборка

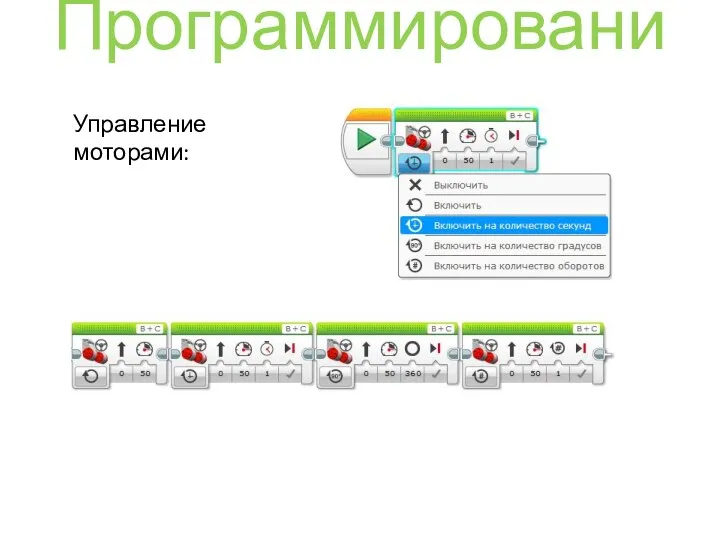
Программирование
Управление моторами:
Программирование
Управление моторами:
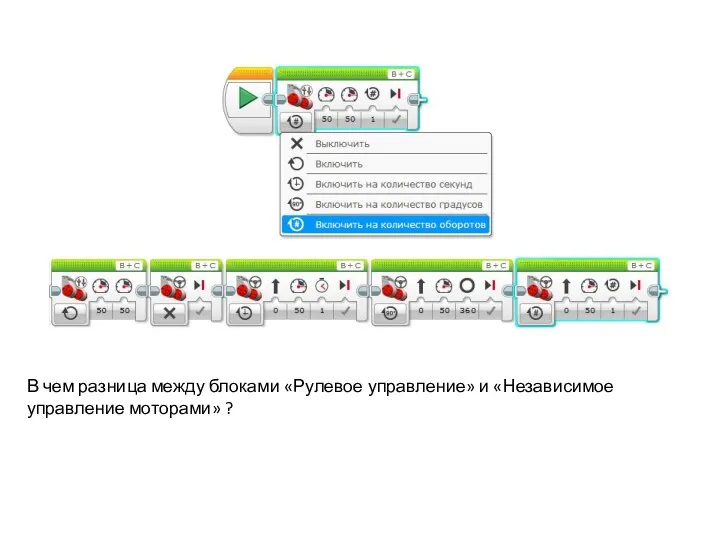
В чем разница между блоками «Рулевое управление» и «Независимое управление моторами»
В чем разница между блоками «Рулевое управление» и «Независимое управление моторами»
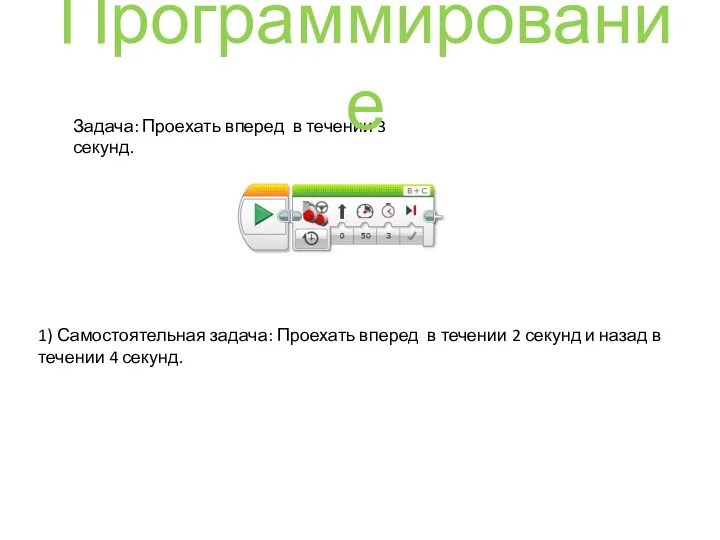
Задача: Проехать вперед в течении 3 секунд.
Программирование
1) Самостоятельная задача: Проехать вперед
Задача: Проехать вперед в течении 3 секунд.
Программирование
1) Самостоятельная задача: Проехать вперед
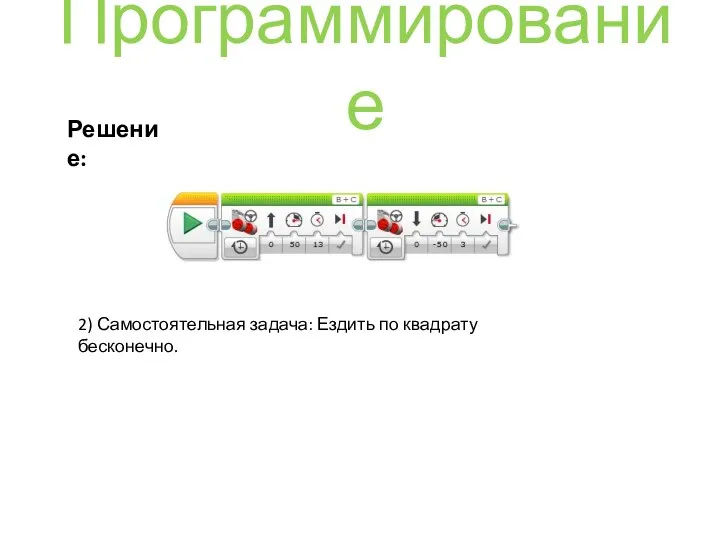
Решение:
Программирование
2) Самостоятельная задача: Ездить по квадрату бесконечно.
Решение:
Программирование
2) Самостоятельная задача: Ездить по квадрату бесконечно.
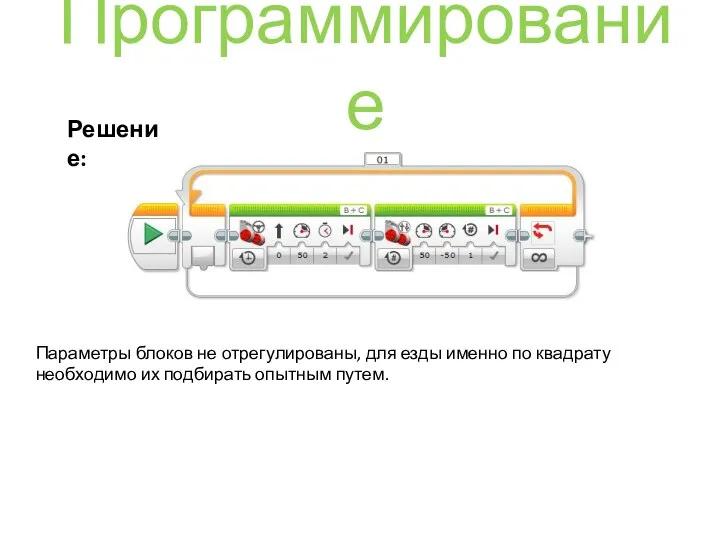
Программирование
Решение:
Параметры блоков не отрегулированы, для езды именно по квадрату необходимо их
Программирование
Решение:
Параметры блоков не отрегулированы, для езды именно по квадрату необходимо их
Программирование
Блок ожидания и его режимы работы:
Программирование
Блок ожидания и его режимы работы:
Программирование
Программирование
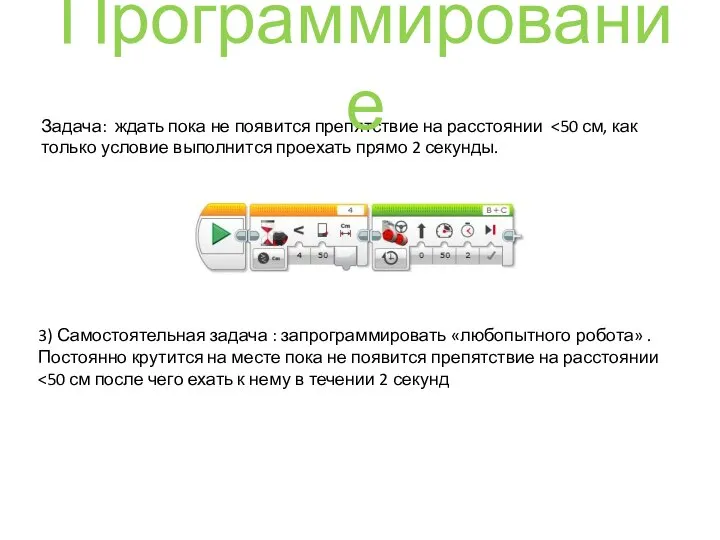
Задача: ждать пока не появится препятствие на расстоянии <50 см, как
Задача: ждать пока не появится препятствие на расстоянии <50 см, как
Программирование
Усовершенствуем нашего «Любопытного робота», после обнаружения препятствия робот едет к нему
Программирование
Усовершенствуем нашего «Любопытного робота», после обнаружения препятствия робот едет к нему
Программирование
Решение:
4) Самостоятельная задача из любопытного робота сделаем пугливого робота. Крутится
Программирование
Решение:
4) Самостоятельная задача из любопытного робота сделаем пугливого робота. Крутится
Программирование
Решение:
4) Самостоятельная задача из любопытного робота сделаем пугливого робота. Крутится
Программирование
Решение:
4) Самостоятельная задача из любопытного робота сделаем пугливого робота. Крутится

Программирование
Решение:
Программирование
Решение:
Слайд для преподавателя!!!
После того как «Пугливый робот запрограммирован» если осталось время,
Слайд для преподавателя!!!
После того как «Пугливый робот запрограммирован» если осталось время,
 P9X79 Series Confidential
P9X79 Series Confidential Электрооборудование. Электроснабжение бортовой сети
Электрооборудование. Электроснабжение бортовой сети Бережливое производство в практике российских предприятий Бизнес-форум 28.02.2012. Пермь Ведущий: А.Б.Семенцов
Бережливое производство в практике российских предприятий Бизнес-форум 28.02.2012. Пермь Ведущий: А.Б.Семенцов Статистические свойства системы
Статистические свойства системы «Поведение потребителей автомобилей» Бондарева Лидия Гавриш Кристина Житкова Екатерина Пономарева Виктория
«Поведение потребителей автомобилей» Бондарева Лидия Гавриш Кристина Житкова Екатерина Пономарева Виктория Биография Д.И. Менделеева в датах
Биография Д.И. Менделеева в датах Тестирование и отладка программного обеспечения. Нормативно-правовая база
Тестирование и отладка программного обеспечения. Нормативно-правовая база 1. К участковому стоматологу обратилась бабушка ребенка 2 мес. с незарощением верхней губы. 1. К участковому стоматологу обратил
1. К участковому стоматологу обратилась бабушка ребенка 2 мес. с незарощением верхней губы. 1. К участковому стоматологу обратил Передачи. Ременные, цепные, фрикционные передачи
Передачи. Ременные, цепные, фрикционные передачи Жанна д’Арк Национальная героиня Франции
Жанна д’Арк Национальная героиня Франции Миграция и религия
Миграция и религия ЕИТКС МВД России. Интегрированный банк данных «ИБД-Регион»
ЕИТКС МВД России. Интегрированный банк данных «ИБД-Регион» Патристика IV - VIII веков. Греческая патристика
Патристика IV - VIII веков. Греческая патристика Млечный путь
Млечный путь Лекция 5. Тип Круглые черви Nemathelminthes – паразиты человека и животных.
Лекция 5. Тип Круглые черви Nemathelminthes – паразиты человека и животных.  Традиции народа Африки. "Бушмены"
Традиции народа Африки. "Бушмены" Операции и выражения. Операторы
Операции и выражения. Операторы Государство как универсальный политический институт Кучеров Илья Колосков Игорь
Государство как универсальный политический институт Кучеров Илья Колосков Игорь Государственная политика в сфере физической культуры и спорта в условиях становления социального государства
Государственная политика в сфере физической культуры и спорта в условиях становления социального государства Понятие «физическая готовность» в структуре общей готовности человека к профессиональной деятельности
Понятие «физическая готовность» в структуре общей готовности человека к профессиональной деятельности Презентация Пряжа и нити текстильные
Презентация Пряжа и нити текстильные Роль религии в жизни общества
Роль религии в жизни общества Необычные материалы для скульптуры Выполнила студентка 3Б группы Зубкова Д.А.
Необычные материалы для скульптуры Выполнила студентка 3Б группы Зубкова Д.А.  Гимнастические залы и площадки
Гимнастические залы и площадки Рождение ислама
Рождение ислама Гигиена труда в механических цехах
Гигиена труда в механических цехах Презентация Анализ форм занятости населения, видов трудоустройства
Презентация Анализ форм занятости населения, видов трудоустройства  Україна – це моя Батьківщина
Україна – це моя Батьківщина