- Искусственный интеллект

Содержание
- 2. Глава 11: Искусственный интеллект 11.1 Машины и интеллект 11.2 Распознавание изображений 11.3 Способность к рассуждению 11.4
- 3. 0- Интеллектуальный агент Агент: “Устройство”, которое реагирует на раздражители из окружающей среды Датчики(Sensors) Актюаторы(Actuators) Большая часть
- 4. Уровни интеллектуального поведения Рефлекс: действие предопределенное реакцией на входные данные Более интеллектуальное поведение требует знания окружающей
- 5. Рисунок 11.1 Головоломка "Восьмерка" с расположением фишек, соответствующим правильному решению
- 6. Рисунок 11.2 Машина для решения головоломки "Восьмерка"
- 7. Подходы к исследованию в искусственном интеллекте Технический путь Результативно-ориентированный Теоретический путь Имитационно-ориентированный
- 8. Тест Тьюринга Тест: Опросчик общается с испытуемым посредством терминала. Суть теста: Сможет ли опросчик определить кем
- 9. Распознавание изображений Сравнение с эталоном Обработка изображений Коррекция контуров Нахождение областей Сглаживание Анализ изображений
- 10. Обработка языка Синтаксический анализ Семантический анализ Контекстный анализ
- 11. Рисунок 11.3 Семантическая сеть
- 12. Компоненты порождающей системы 1. Набор состояний Стартовое (или начальное) состояние Целевое состояние 2. Набор порождений: правила
- 13. Рассуждения для поиска Граф состояний: Все состояния и порождения Дерево поиска: Запись переходов состояний при поиске
- 14. Рисунок 11.4 Небольшая часть графа состояний для головоломки "Восьмерка"
- 15. Рисунок 11.5 Дедуктивные рассуждения, представленные в контексте порождающей системы
- 16. Рисунок 11.6 Головоломка в промежуточном состоянии
- 17. Рисунок 11.7 Пример дерева поиска
- 18. Рисунок 11.8 Последовательность порождений записанная в стек для следующего выполнения
- 19. 0- Эвристические методы Эвристика: Практическое правило для принятия решений Требования для хорошей эвристики Должно быть легче
- 20. Рисунок 11.9 Еще один вариант смешанного состояния головоломки
- 21. Рисунок 11.10 Алгоритм работы системы контроля , использующий эвристический метод
- 22. Рисунок 11.11 Начало эвристического метода
- 23. Рисунок 11.12 Дерево поиска после двух проходов цикла
- 24. Рисунок 11.13 Дерево поиска после трёх проходов цикла
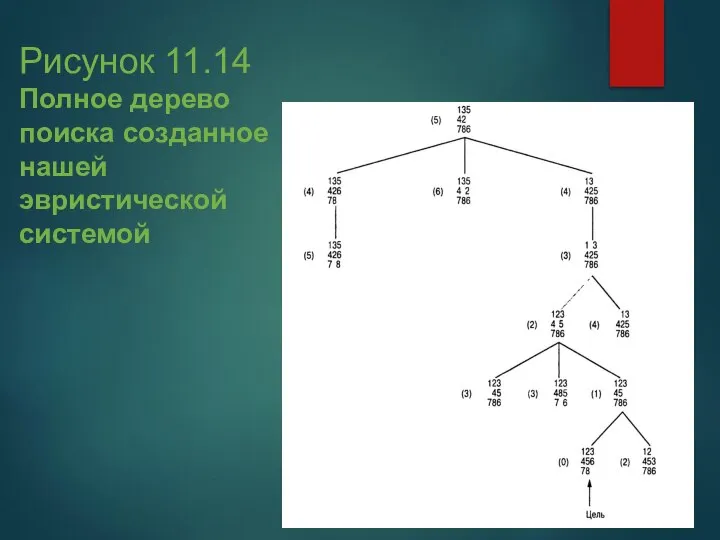
- 25. 0- Рисунок 11.14 Полное дерево поиска созданное нашей эвристической системой
- 26. Обработка практических знаний Представление и хранение Доступ к релевантной информации Метаосмысление Необоснованное предположение Фрейм задачи
- 27. Обучение Имитация Обучение с учителем Набор тренировок Представление
- 28. Генетические алгоритмы Начинается с генерации случайных объединений пробных решений: Каждое решение это хромосома Каждый компонент хромосомы
- 29. Искусственные нейронные сети Искусственные нейроны Каждый вход умножается на весовой коэффициент. Выход равен 1, если сумма
- 30. Рисунок 11.15 Нейрон живой биологической системы
- 31. Рисунок 11.16 Процессы происходящие в блоке обработки
- 32. Рисунок 11.17 Графическое представление блока обработки
- 33. Рисунок 11.18 Нейронная сеть с двумя различными программами
- 34. Рисунок 11.20 Структура ALVINN
- 35. Ассоциативная память Ассоциативная память: Поиск информации, относящейся к информации под рукой Одно направление исследования стремится построить
- 36. Рисунок 11.21 Искусственная нейронная сеть, осуществляющая ассоциативную память
- 37. Рисунок 11.22 Шаги, приводящие к стабильной конфигурации
- 38. Робототехника Действительно автономные роботы требуют прогресса в восприятия и рассуждения. Важные шаги, сделаны в подвижности Разработка
- 40. Скачать презентацию
Глава 11: Искусственный
интеллект
11.1 Машины и интеллект
11.2 Распознавание изображений
Глава 11: Искусственный
интеллект
11.1 Машины и интеллект
11.2 Распознавание изображений
0-
Интеллектуальный агент
Агент: “Устройство”, которое реагирует на раздражители из окружающей среды
Датчики(Sensors)
Актюаторы(Actuators)
Большая часть
0-
Интеллектуальный агент
Агент: “Устройство”, которое реагирует на раздражители из окружающей среды
Датчики(Sensors)
Актюаторы(Actuators)
Большая часть
Уровни интеллектуального поведения
Рефлекс: действие предопределенное реакцией на входные данные
Более интеллектуальное
Уровни интеллектуального поведения
Рефлекс: действие предопределенное реакцией на входные данные
Более интеллектуальное
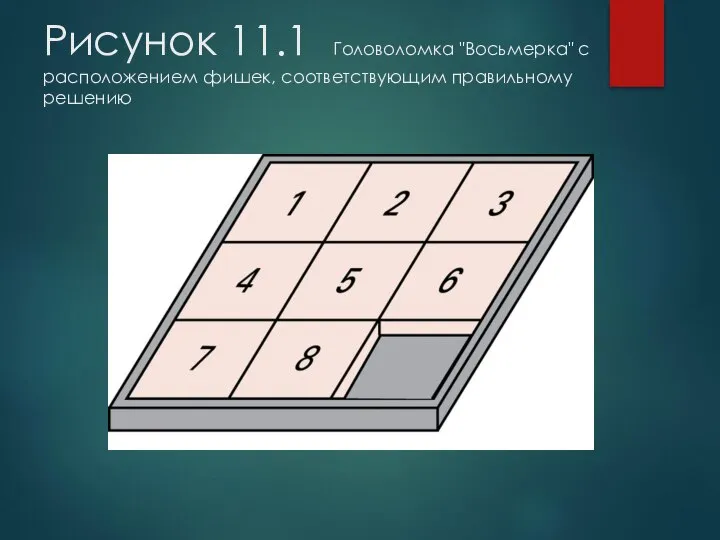
Рисунок 11.1 Головоломка "Восьмерка" с расположением фишек, соответствующим правильному
решению
Рисунок 11.1 Головоломка "Восьмерка" с расположением фишек, соответствующим правильному
решению

Рисунок 11.2 Машина для
решения головоломки "Восьмерка"
Рисунок 11.2 Машина для
решения головоломки "Восьмерка"
Подходы к исследованию в искусственном интеллекте
Технический путь
Результативно-ориентированный
Теоретический путь
Имитационно-ориентированный
Подходы к исследованию в искусственном интеллекте
Технический путь
Результативно-ориентированный
Теоретический путь
Имитационно-ориентированный
Тест Тьюринга
Тест: Опросчик общается с испытуемым посредством терминала.
Суть теста: Сможет ли
Тест Тьюринга
Тест: Опросчик общается с испытуемым посредством терминала.
Суть теста: Сможет ли
Распознавание
изображений
Сравнение с эталоном
Обработка изображений
Коррекция контуров
Нахождение областей
Сглаживание
Анализ изображений
Распознавание
изображений
Сравнение с эталоном
Обработка изображений
Коррекция контуров
Нахождение областей
Сглаживание
Анализ изображений
Обработка языка
Синтаксический анализ
Семантический анализ
Контекстный анализ
Обработка языка
Синтаксический анализ
Семантический анализ
Контекстный анализ
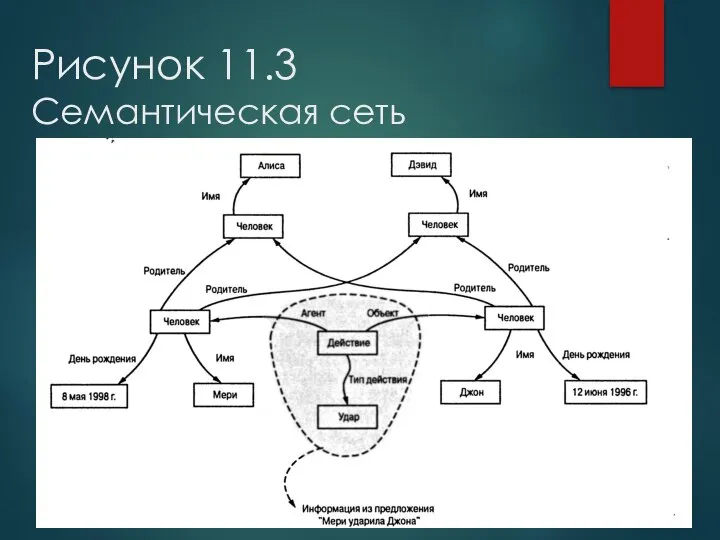
Рисунок 11.3 Семантическая сеть
Рисунок 11.3 Семантическая сеть
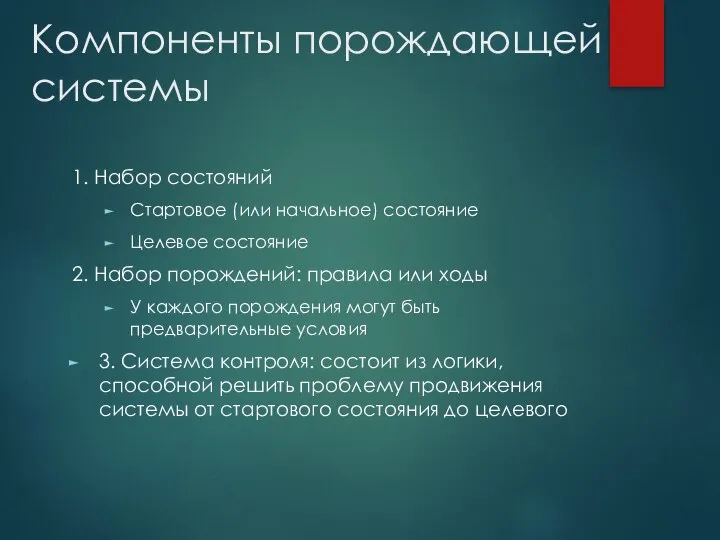
Компоненты порождающей системы
1. Набор состояний
Стартовое (или начальное) состояние
Целевое состояние
2. Набор
Компоненты порождающей системы
1. Набор состояний
Стартовое (или начальное) состояние
Целевое состояние
2. Набор
Рассуждения для поиска
Граф состояний: Все состояния и порождения
Дерево поиска: Запись переходов
Рассуждения для поиска
Граф состояний: Все состояния и порождения
Дерево поиска: Запись переходов
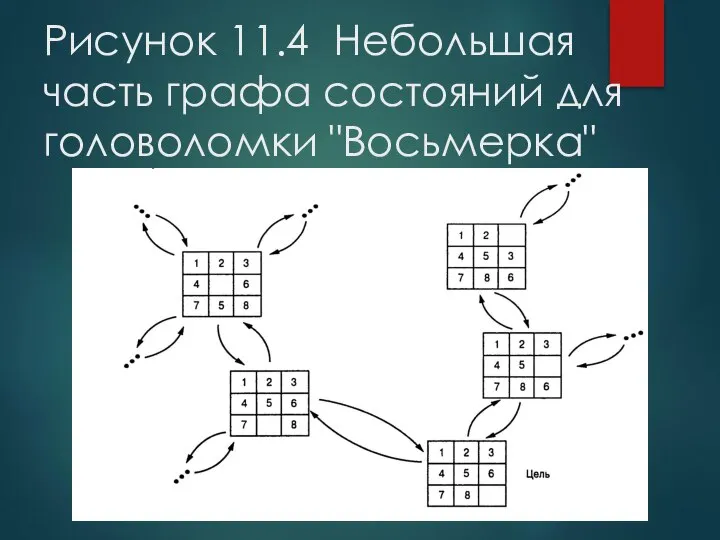
Рисунок 11.4 Небольшая часть графа состояний для головоломки "Восьмерка"
Рисунок 11.4 Небольшая часть графа состояний для головоломки "Восьмерка"
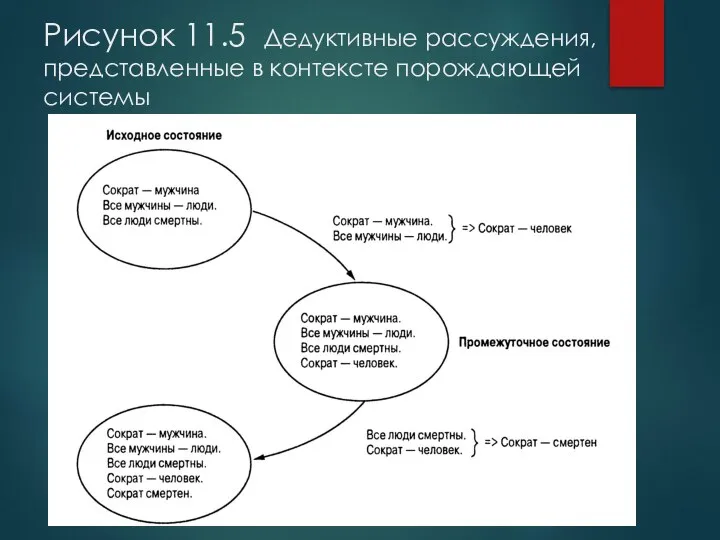
Рисунок 11.5 Дедуктивные рассуждения, представленные в контексте порождающей системы
Рисунок 11.5 Дедуктивные рассуждения, представленные в контексте порождающей системы
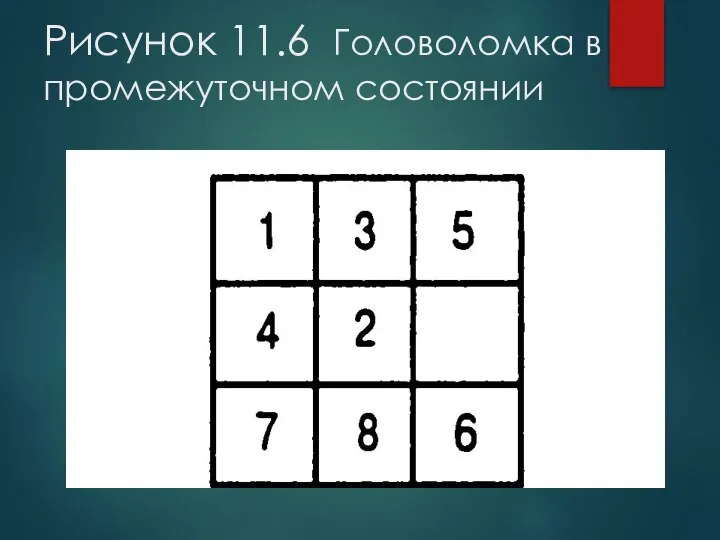
Рисунок 11.6 Головоломка в промежуточном состоянии
Рисунок 11.6 Головоломка в промежуточном состоянии
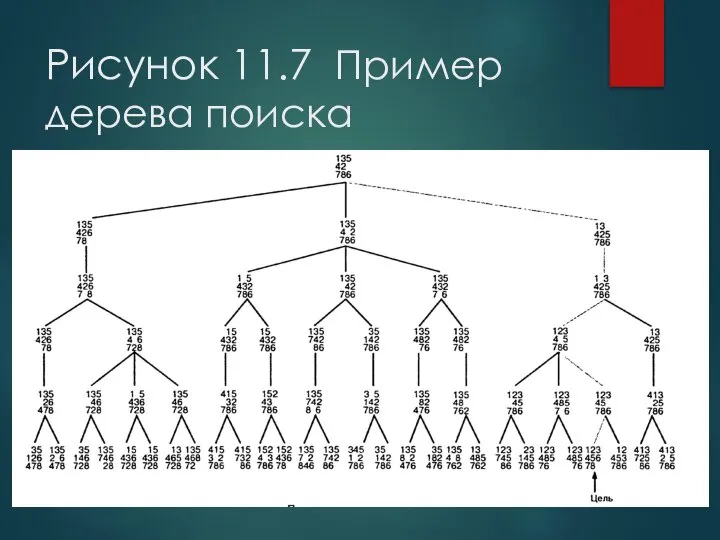
Рисунок 11.7 Пример дерева поиска
Рисунок 11.7 Пример дерева поиска
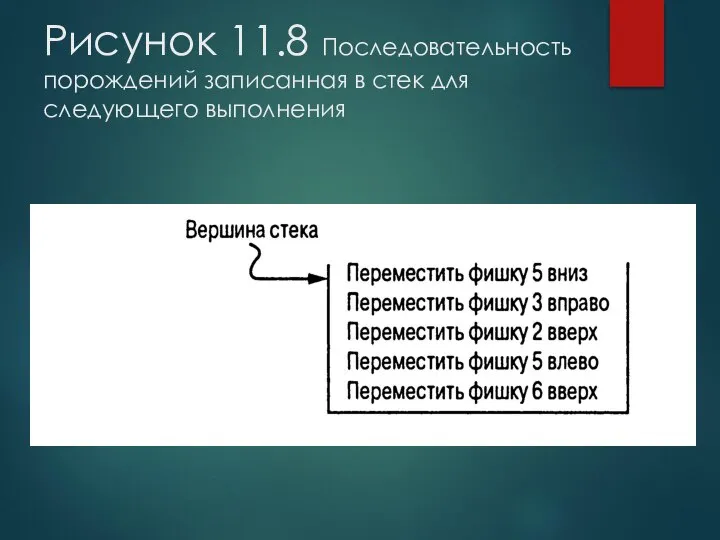
Рисунок 11.8 Последовательность порождений записанная в стек для
следующего выполнения
Рисунок 11.8 Последовательность порождений записанная в стек для
следующего выполнения
0-
Эвристические методы
Эвристика: Практическое правило для принятия решений
Требования для хорошей эвристики
Должно
0-
Эвристические методы
Эвристика: Практическое правило для принятия решений
Требования для хорошей эвристики
Должно
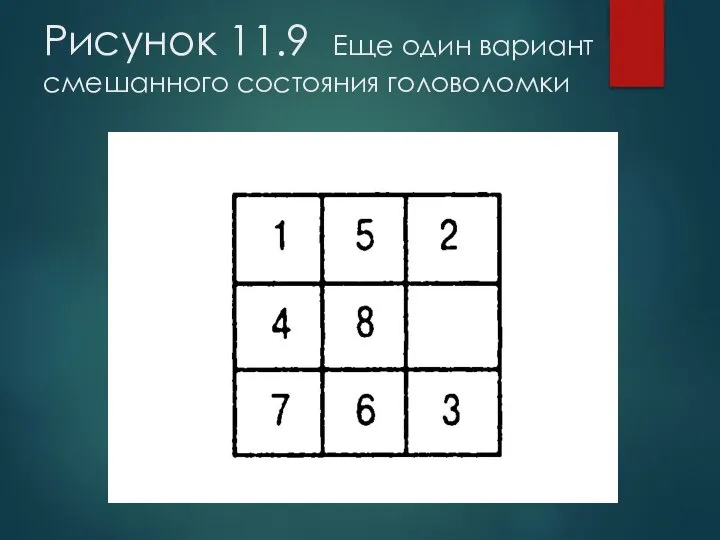
Рисунок 11.9 Еще один вариант смешанного состояния головоломки
Рисунок 11.9 Еще один вариант смешанного состояния головоломки
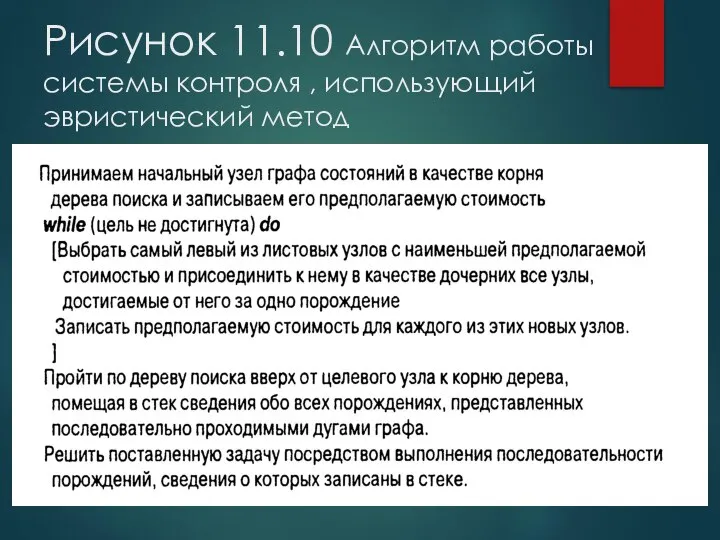
Рисунок 11.10 Алгоритм работы системы контроля , использующий эвристический метод
Рисунок 11.10 Алгоритм работы системы контроля , использующий эвристический метод
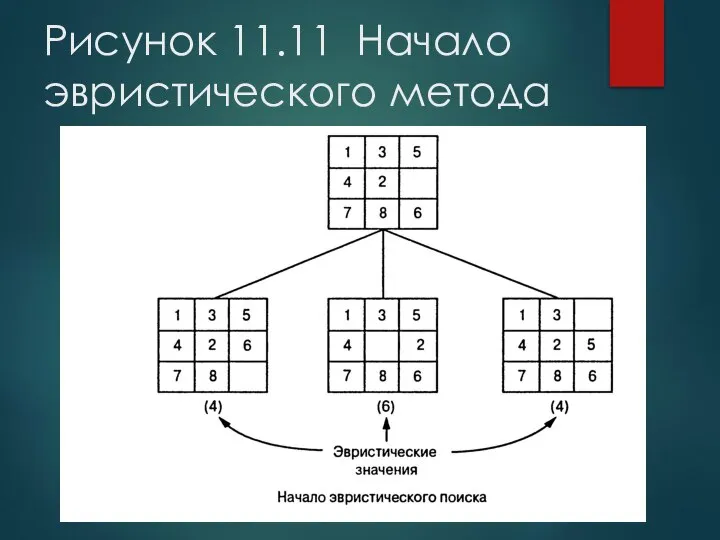
Рисунок 11.11 Начало эвристического метода
Рисунок 11.11 Начало эвристического метода
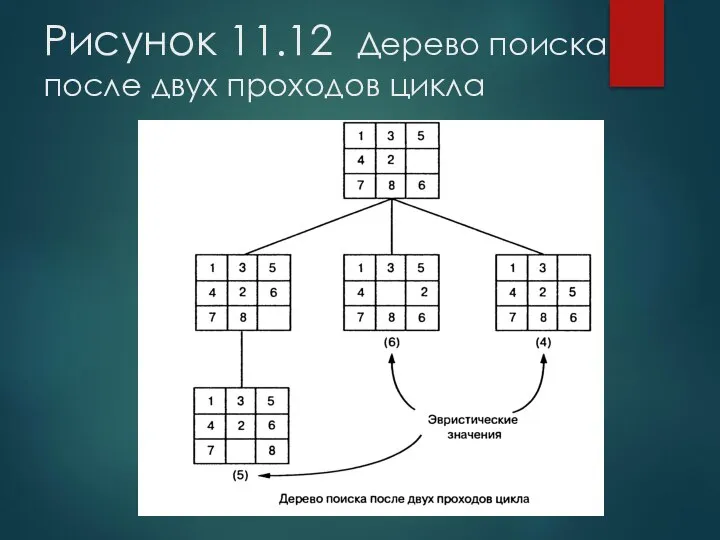
Рисунок 11.12 Дерево поиска после двух проходов цикла
Рисунок 11.12 Дерево поиска после двух проходов цикла
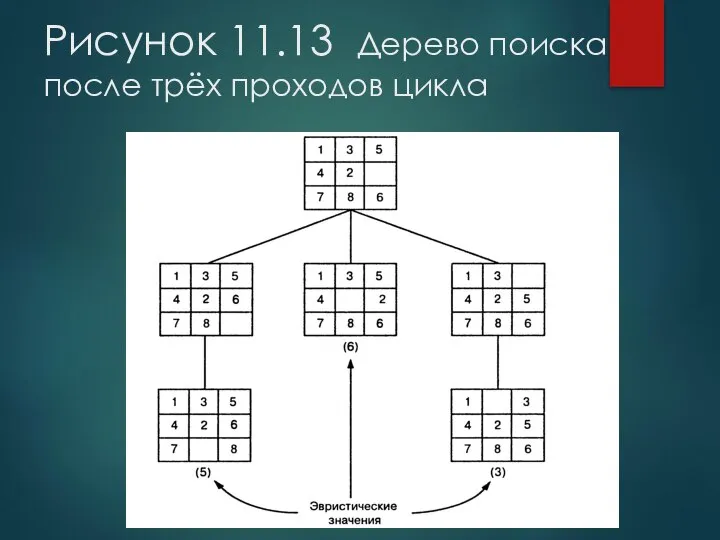
Рисунок 11.13 Дерево поиска после трёх проходов цикла
Рисунок 11.13 Дерево поиска после трёх проходов цикла
0-
Рисунок 11.14 Полное дерево поиска созданное нашей эвристической системой
0-
Рисунок 11.14 Полное дерево поиска созданное нашей эвристической системой

Обработка практических знаний
Представление и хранение
Доступ к релевантной информации
Метаосмысление
Необоснованное предположение
Фрейм задачи
Обработка практических знаний
Представление и хранение
Доступ к релевантной информации
Метаосмысление
Необоснованное предположение
Фрейм задачи
Обучение
Имитация
Обучение с учителем
Набор тренировок
Представление
Обучение
Имитация
Обучение с учителем
Набор тренировок
Представление
Генетические алгоритмы
Начинается с генерации случайных объединений пробных решений:
Каждое решение это
Генетические алгоритмы
Начинается с генерации случайных объединений пробных решений:
Каждое решение это
Искусственные нейронные сети
Искусственные нейроны
Каждый вход умножается на весовой коэффициент.
Выход равен 1,
Искусственные нейронные сети
Искусственные нейроны
Каждый вход умножается на весовой коэффициент.
Выход равен 1,
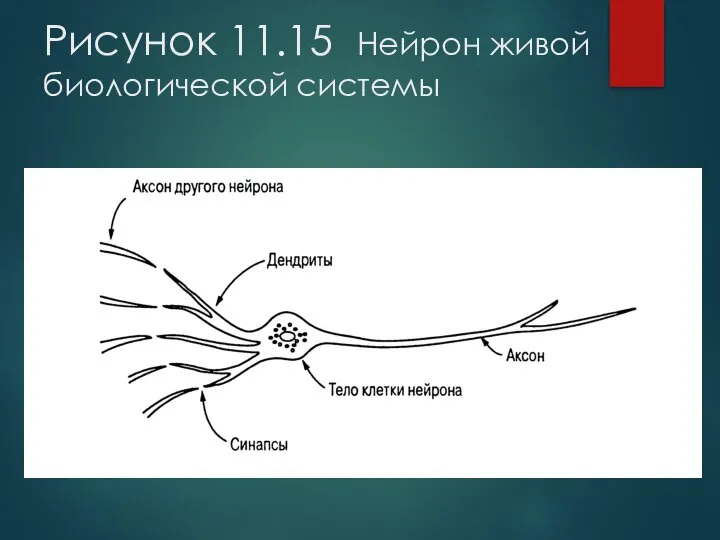
Рисунок 11.15 Нейрон живой биологической системы
Рисунок 11.15 Нейрон живой биологической системы
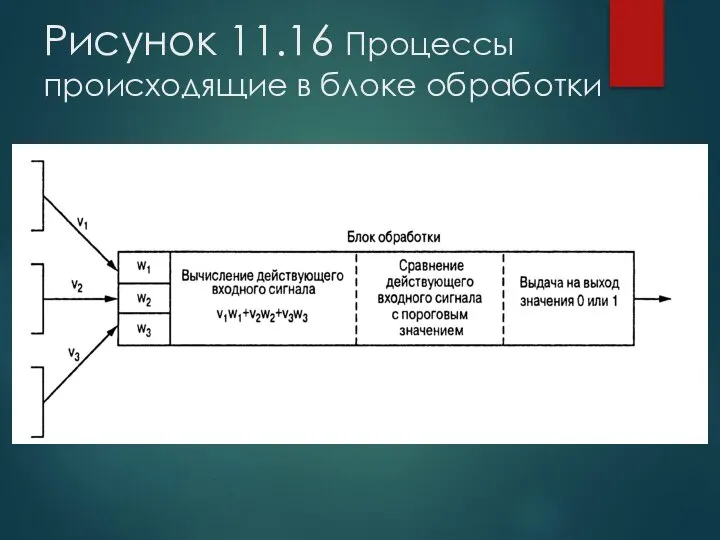
Рисунок 11.16 Процессы происходящие в блоке обработки
Рисунок 11.16 Процессы происходящие в блоке обработки
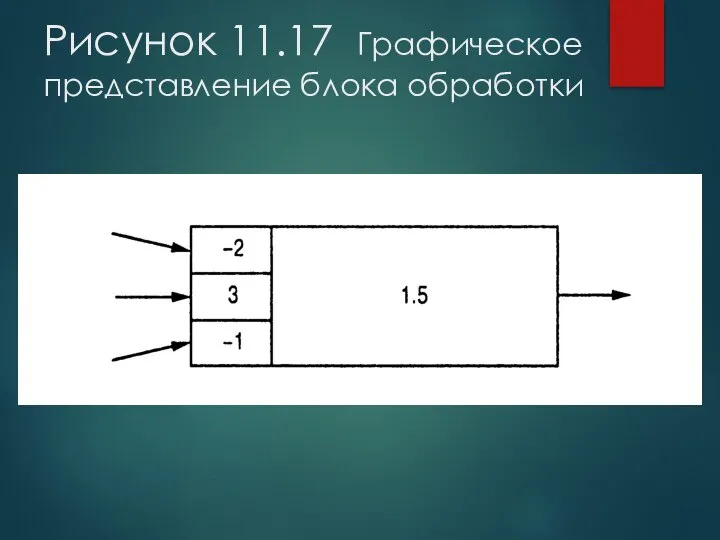
Рисунок 11.17 Графическое представление блока обработки
Рисунок 11.17 Графическое представление блока обработки
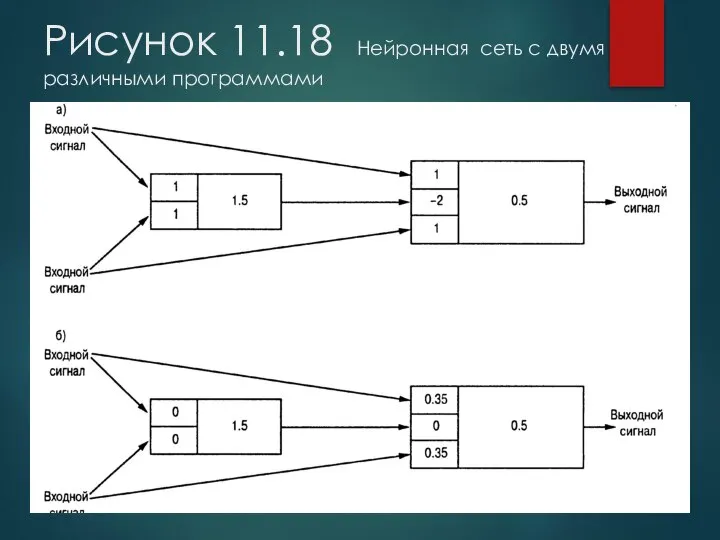
Рисунок 11.18 Нейронная сеть с двумя различными программами
Рисунок 11.18 Нейронная сеть с двумя различными программами
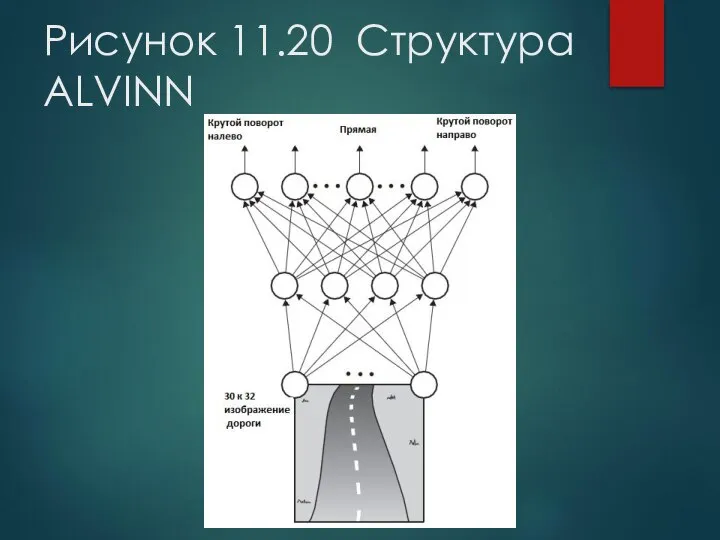
Рисунок 11.20 Структура
ALVINN
Рисунок 11.20 Структура
ALVINN
Ассоциативная память
Ассоциативная память: Поиск информации, относящейся к информации под рукой
Одно направление
Ассоциативная память
Ассоциативная память: Поиск информации, относящейся к информации под рукой
Одно направление
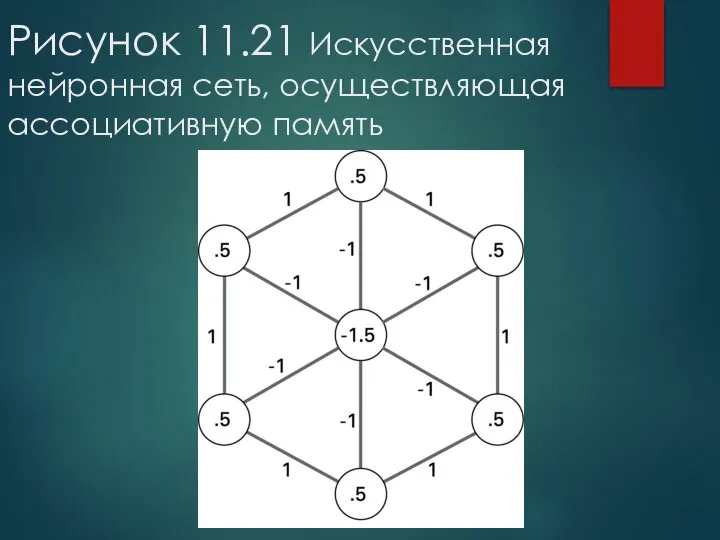
Рисунок 11.21 Искусственная нейронная сеть, осуществляющая ассоциативную память
Рисунок 11.21 Искусственная нейронная сеть, осуществляющая ассоциативную память
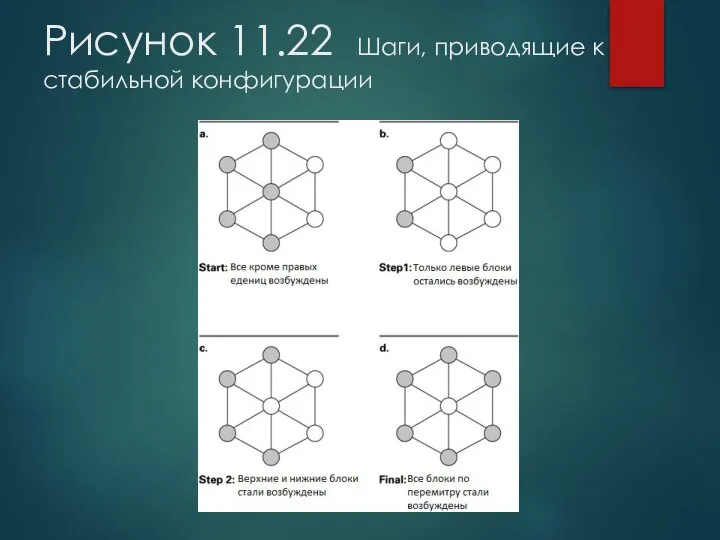
Рисунок 11.22 Шаги, приводящие к стабильной конфигурации
Рисунок 11.22 Шаги, приводящие к стабильной конфигурации
Робототехника
Действительно автономные роботы требуют прогресса в восприятия и рассуждения.
Важные шаги, сделаны
Робототехника
Действительно автономные роботы требуют прогресса в восприятия и рассуждения.
Важные шаги, сделаны
 Взаимоотношения владельца магазина с участниками ВЭД и таможенными
Взаимоотношения владельца магазина с участниками ВЭД и таможенными  СТО-ның міндеттері
СТО-ның міндеттері ИМЕЮ ПРАВО…
ИМЕЮ ПРАВО… Развитие системы общественного контроля в Российской Федерации на современном этапе
Развитие системы общественного контроля в Российской Федерации на современном этапе Философия культуры О. Шпенглера
Философия культуры О. Шпенглера Реформы Сергея Юльевича Витте Работу выполнили: студентки первого курса ФТД очного отделения группы Т-111, Мухина Мария и Макаров
Реформы Сергея Юльевича Витте Работу выполнили: студентки первого курса ФТД очного отделения группы Т-111, Мухина Мария и Макаров Эндокринные органы. Гипоталямо-гипофизарная система
Эндокринные органы. Гипоталямо-гипофизарная система Schwache Verben
Schwache Verben Ислам. Столпы ислама
Ислам. Столпы ислама Экономическая теория
Экономическая теория ОРГАНИЗАЦИЯ ПЕРЕВОЗКИ ВНЕШНЕТОРГОВЫХ ГРУЗОВ МОРСКИМ ТРАНСПОРТОМ Дисциплина: Организация ВЭД предприятия (фирмы)
ОРГАНИЗАЦИЯ ПЕРЕВОЗКИ ВНЕШНЕТОРГОВЫХ ГРУЗОВ МОРСКИМ ТРАНСПОРТОМ Дисциплина: Организация ВЭД предприятия (фирмы) Последовательное соединение RLC-элементов
Последовательное соединение RLC-элементов Условия перевозок скоропортящихся грузов в вагонах и контейнерах
Условия перевозок скоропортящихся грузов в вагонах и контейнерах  Однофазный трансформатор
Однофазный трансформатор SLF4J project
SLF4J project  Выпуклый анализ. Выпуклые множества. Лекция 6
Выпуклый анализ. Выпуклые множества. Лекция 6 ДИСТАНЦИОННЬЕ ОБРАЗОВАТЕЛЬНЫЕ ТЕХНОЛОГИИ: Клуб информационных технологий Заседание № 1
ДИСТАНЦИОННЬЕ ОБРАЗОВАТЕЛЬНЫЕ ТЕХНОЛОГИИ: Клуб информационных технологий Заседание № 1 Неклассическая философия
Неклассическая философия КУЛЬТУРА ЗАПАДНОЙ ЕВРОПЫ
КУЛЬТУРА ЗАПАДНОЙ ЕВРОПЫ Полигональный моделинг в 3dsMax
Полигональный моделинг в 3dsMax Готический стиль замков и храмов
Готический стиль замков и храмов  Способы преобразования проекций. Способ совмещения. (Лекция 6)
Способы преобразования проекций. Способ совмещения. (Лекция 6) Травма челюстей 2015
Травма челюстей 2015 Customs and traditions of Great Britain
Customs and traditions of Great Britain Троица - христианский праздник
Троица - христианский праздник Костюм эпохи Відродження
Костюм эпохи Відродження МОУ средняя общеобразовательная школа №9 г. Искитима Новосибирской области Научно-исследовательская работа по теме «В школу с у
МОУ средняя общеобразовательная школа №9 г. Искитима Новосибирской области Научно-исследовательская работа по теме «В школу с у Этнографический музей народов Байкала
Этнографический музей народов Байкала