- Измерительные сигналы

Содержание
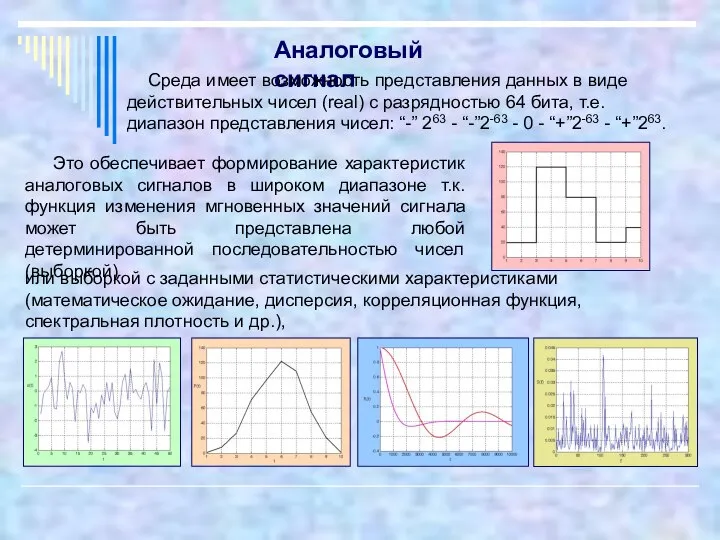
- 2. Аналоговый сигнал Среда имеет возможность представления данных в виде действительных чисел (real) с разрядностью 64 бита,
- 3. частота дискретизации моделирования определяется масштабным коэффициентом, который может измеряться в наносекундах, модель аналогового сигнала имеет методические
- 4. Данные заданные в виде аналоговых сигналов типа напряжение включено от двух или многопозиционных переключателей, кнопок или
- 5. 2 Модели средств Модель датчика представляет собой модель физического процесса - источника информации (математическая модель измеряемого
- 6. Следует отметить, что в известных системах вопросы анализа динамических характеристик реальных средств в такой постановке не
- 7. Методическая погрешность - 3 Модель измерительного преобразователя Вторичный измерительный преобразователь (ИП) реализует измерительную функцию (процедуру) одним
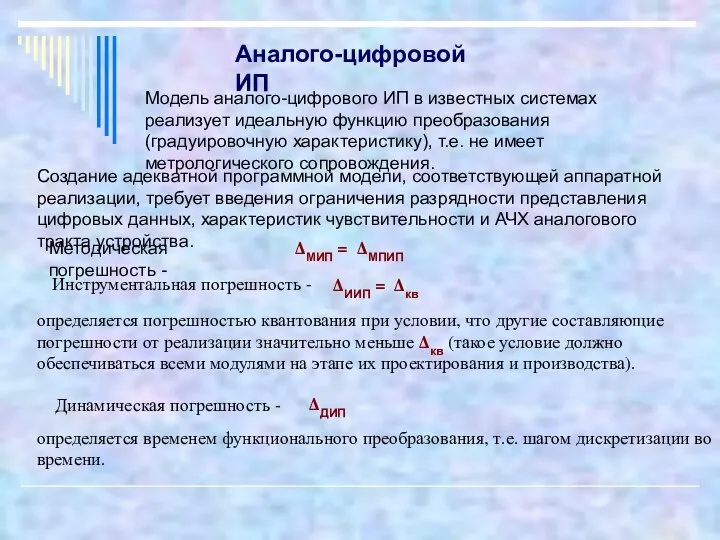
- 8. Динамическая погрешность - Аналого-цифровой ИП Модель аналого-цифрового ИП в известных системах реализует идеальную функцию преобразования (градуировочную
- 9. определяется временем реализации измерительного преобразования, причем у аппаратной реализации эта величина как правило постоянная, а у
- 10. Устройства отображения измерительной информации можно объединить в три группы: аналоговые отсчетные устройства, цифровые индикаторы и осциллографы.
- 11. - это стрелочные (угловые) устройства со шкалой, имеющей цену деления в измеряемых единицах. Модели таких устройств
- 12. Методическая погрешность отсчетного устройства может быть сведена к минимальной за счет выбора максимальной разрядности модели в
- 13. - устройство отображающее функциональные зависимости характеристик измеряемых сигналов типа x(t) и x(y). Цифровой осциллограф использует для
- 14. При этом возникают погрешности от квантования по осям двухмерного пространства. Временная развертка связана с представлением сигнала
- 15. Погрешности ВСИ В таблице: ΔМПИП , ΔМИП , ΔМОУ - методические, ΔИПИП , ΔИИП , ΔИОУ
- 17. Скачать презентацию
Аналоговый сигнал
Среда имеет возможность представления данных в виде действительных чисел (real)
Аналоговый сигнал
Среда имеет возможность представления данных в виде действительных чисел (real)
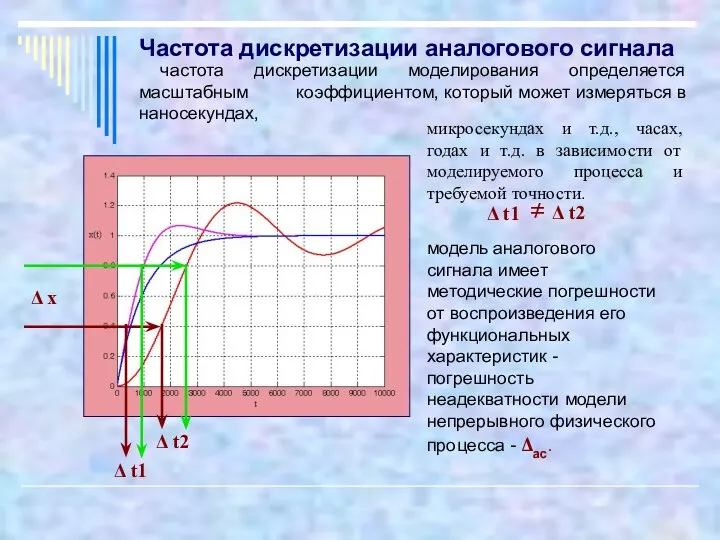
частота дискретизации моделирования определяется масштабным коэффициентом, который может измеряться в наносекундах,
частота дискретизации моделирования определяется масштабным коэффициентом, который может измеряться в наносекундах,
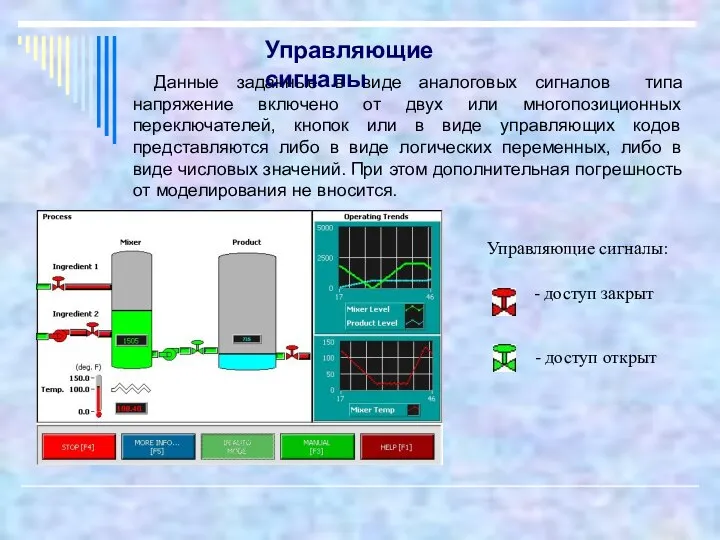
Данные заданные в виде аналоговых сигналов типа напряжение включено от двух
Данные заданные в виде аналоговых сигналов типа напряжение включено от двух

2 Модели средств
Модель датчика представляет собой модель физического процесса - источника
2 Модели средств
Модель датчика представляет собой модель физического процесса - источника

Следует отметить, что в известных системах вопросы анализа динамических характеристик реальных
Следует отметить, что в известных системах вопросы анализа динамических характеристик реальных
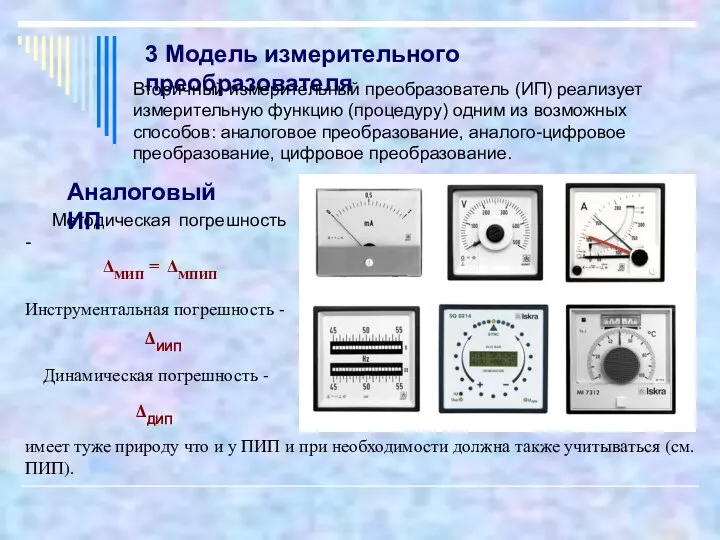
Методическая погрешность -
3 Модель измерительного преобразователя
Вторичный измерительный преобразователь (ИП) реализует измерительную
Методическая погрешность -
3 Модель измерительного преобразователя
Вторичный измерительный преобразователь (ИП) реализует измерительную
Динамическая погрешность -
Аналого-цифровой ИП
Модель аналого-цифрового ИП в известных системах реализует идеальную
Динамическая погрешность -
Аналого-цифровой ИП
Модель аналого-цифрового ИП в известных системах реализует идеальную

определяется временем реализации измерительного преобразования, причем у аппаратной реализации эта величина
определяется временем реализации измерительного преобразования, причем у аппаратной реализации эта величина
Устройства отображения измерительной информации можно объединить в три группы: аналоговые отсчетные
Устройства отображения измерительной информации можно объединить в три группы: аналоговые отсчетные
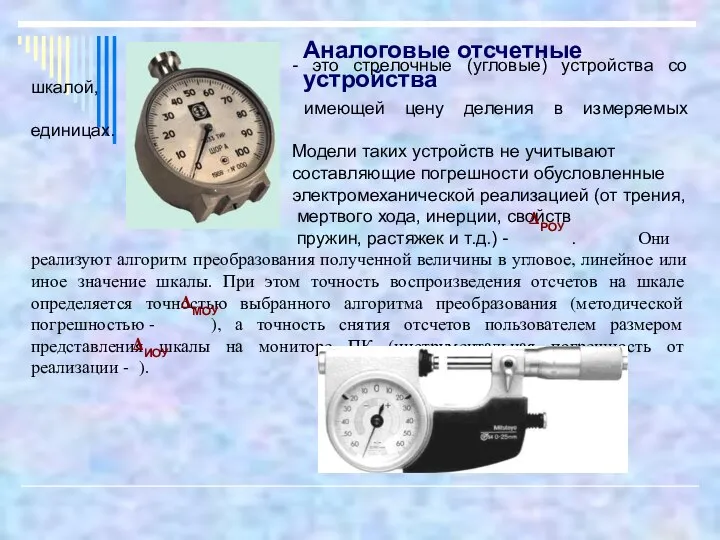
- это стрелочные (угловые) устройства со шкалой,
имеющей цену деления в
- это стрелочные (угловые) устройства со шкалой,
имеющей цену деления в
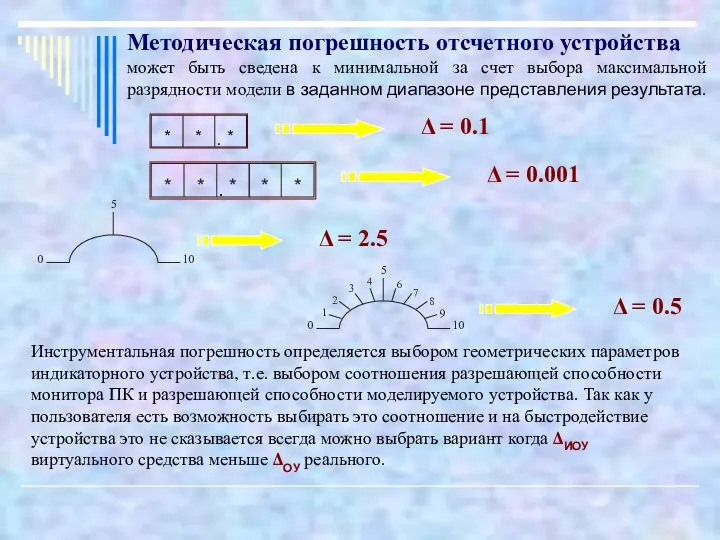
Методическая погрешность отсчетного устройства
может быть сведена к минимальной за счет выбора
Методическая погрешность отсчетного устройства
может быть сведена к минимальной за счет выбора
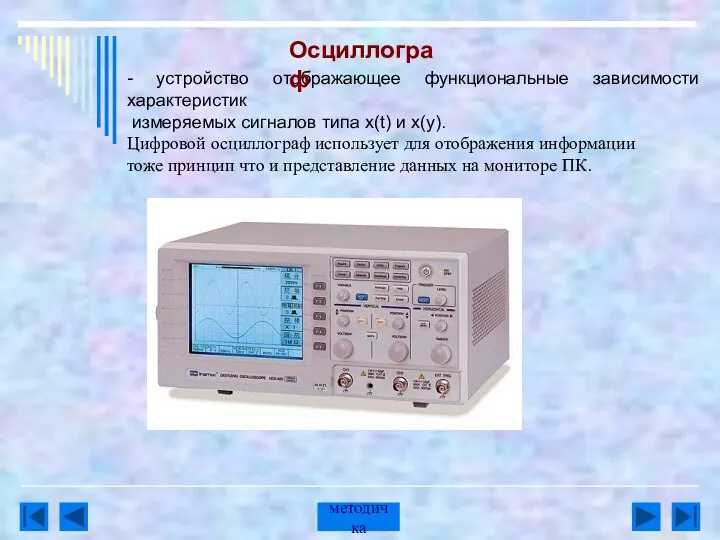
- устройство отображающее функциональные зависимости характеристик
измеряемых сигналов типа x(t) и
- устройство отображающее функциональные зависимости характеристик
измеряемых сигналов типа x(t) и
При этом возникают погрешности от
квантования по осям двухмерного пространства.
Временная
При этом возникают погрешности от
квантования по осям двухмерного пространства.
Временная
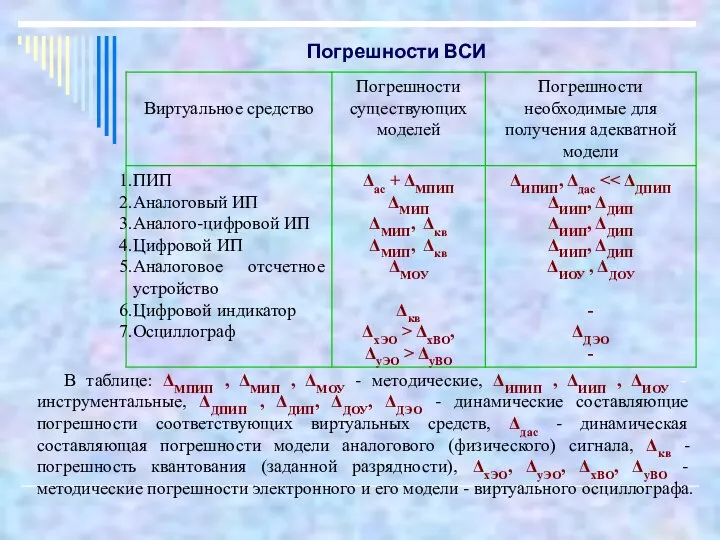
Погрешности ВСИ
В таблице: ΔМПИП , ΔМИП , ΔМОУ - методические, ΔИПИП
Погрешности ВСИ
В таблице: ΔМПИП , ΔМИП , ΔМОУ - методические, ΔИПИП
 Святые Вера, Надежда, Любовь и их мать София
Святые Вера, Надежда, Любовь и их мать София Ислам - миролюбивая религия
Ислам - миролюбивая религия Қазіргі дәстүрлі емес діни қозғалыстар мен бірлестіктер. Діни секталар өте көп
Қазіргі дәстүрлі емес діни қозғалыстар мен бірлестіктер. Діни секталар өте көп Обследование больных с патологией печени и желчного пузыря
Обследование больных с патологией печени и желчного пузыря Архитектура клиента
Архитектура клиента Национальные костюмы и гербы союзных республик СССР
Национальные костюмы и гербы союзных республик СССР Квантовые алгоритмы Монте-Карло Checkerboard algorithm для модели Хаббарда. Расчет физических величин. Расчет функции Грина
Квантовые алгоритмы Монте-Карло Checkerboard algorithm для модели Хаббарда. Расчет физических величин. Расчет функции Грина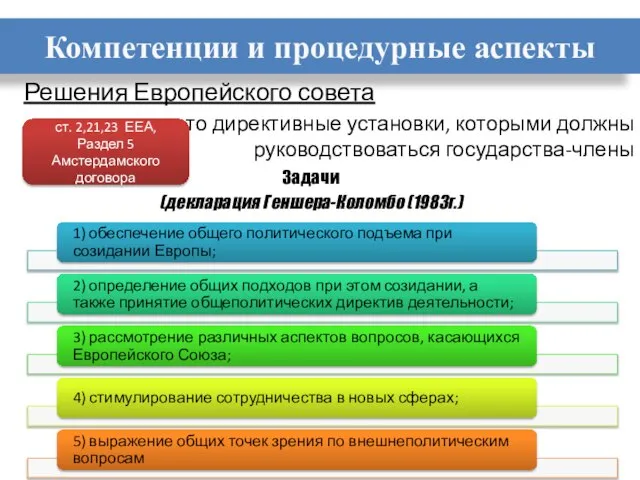 Решения Европейского совета Решения Европейского совета - это директивные установки, которыми должны руководствоваться государ
Решения Европейского совета Решения Европейского совета - это директивные установки, которыми должны руководствоваться государ ХАРАКТЕРНЫЙ ПОРТРЕТ Урок изобразительного искусства
ХАРАКТЕРНЫЙ ПОРТРЕТ Урок изобразительного искусства Культура Индии (11 класс)
Культура Индии (11 класс) Центральный процессор
Центральный процессор Презентация Транспортное обеспечение внешнеэкономической деятельности_
Презентация Транспортное обеспечение внешнеэкономической деятельности_ Закон больших чисел
Закон больших чисел "Призрак оперы" Гастон Леру
"Призрак оперы" Гастон Леру Сти́вен Уи́льям Хо́кинг
Сти́вен Уи́льям Хо́кинг Презентация Философия Древнего Мира
Презентация Философия Древнего Мира Факториал
Факториал  ИКТ в гуманитарных науках Юлия Мартинавичене Надежда Яремчук
ИКТ в гуманитарных науках Юлия Мартинавичене Надежда Яремчук  Президент Российской Федерации
Президент Российской Федерации Родительское собрание ( круглый стол) Развитие внимания у младшего школьника Выявление признаков дефицита вним
Родительское собрание ( круглый стол) Развитие внимания у младшего школьника Выявление признаков дефицита вним Космическая тема в музыке, живописи и кино
Космическая тема в музыке, живописи и кино Составила воспитатель 2 квалификационной категории МБДОУ №40 «Колокольчик» Аникина Н.В. п.Фряново 2013 г.
Составила воспитатель 2 квалификационной категории МБДОУ №40 «Колокольчик» Аникина Н.В. п.Фряново 2013 г. Римское общество и государство в период Республики (509-30 гг. до н
Римское общество и государство в период Республики (509-30 гг. до н Ибрагим Аввад Ибрагим Али аль-Бадри
Ибрагим Аввад Ибрагим Али аль-Бадри О результатах выполнения адресной программы по нормализации температурно-влажностного режима неотапливаемых чердачных помещени
О результатах выполнения адресной программы по нормализации температурно-влажностного режима неотапливаемых чердачных помещени Презентация соотношение, общие характеристики и принципиальные отличия тарифных и нетарифных мер регулирования внешнеторговой
Презентация соотношение, общие характеристики и принципиальные отличия тарифных и нетарифных мер регулирования внешнеторговой  Как да напишем некомерсиална книга с екип от 30 автора?
Как да напишем некомерсиална книга с екип от 30 автора? Корень n-ой степени «Никогда не считай, что ты знаешь всё, что тебе уже больше нечему учиться». Н.Д. Зелинский
Корень n-ой степени «Никогда не считай, что ты знаешь всё, что тебе уже больше нечему учиться». Н.Д. Зелинский