- Типовые структуры ВИС

Содержание
- 2. Типовая структура ВИС
- 3. В зависимости от динамических характеристик аппаратной части измерительной цепи ( Д-ИП-К-НУ-АЦП-VI ) измерительная система может проводить
- 4. Время реализации ИП определяется: Обработка сигналов в реальном времени Измерение значений физической величины и получение ее
- 5. Реализация ВИК может осуществляться в синхронном и асинхронном режимах. Время получения значения характеристики измеряемой величины складывается
- 6. 3) ТАЦП - в данном случае возможен вариант размещением на модуле АЦП дополнительного запоминающего устройства (ЗУ)
- 7. После АЦП сигнал представлен в виде числовой выборки (массива) с шагом дискретизации τ. С учетом значения
- 8. Важной особенностью среды виртуального моделирования является возможность создания модели не только конкретного отдельного физического процесса, а
- 10. Скачать презентацию
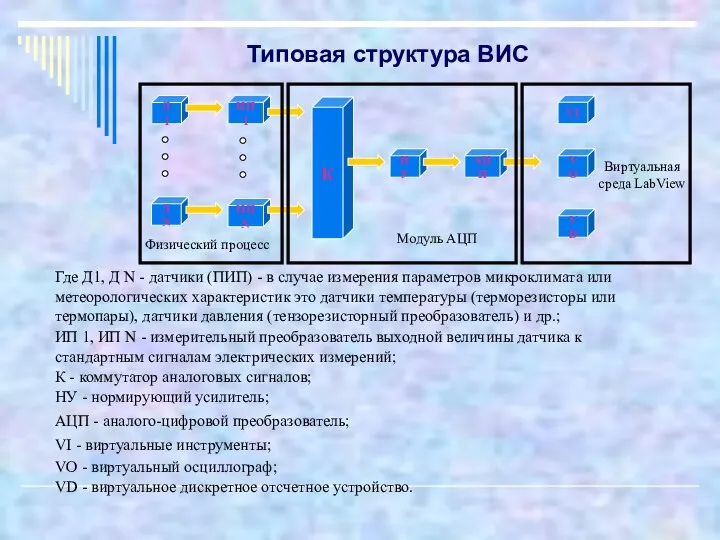
Типовая структура ВИС
Типовая структура ВИС
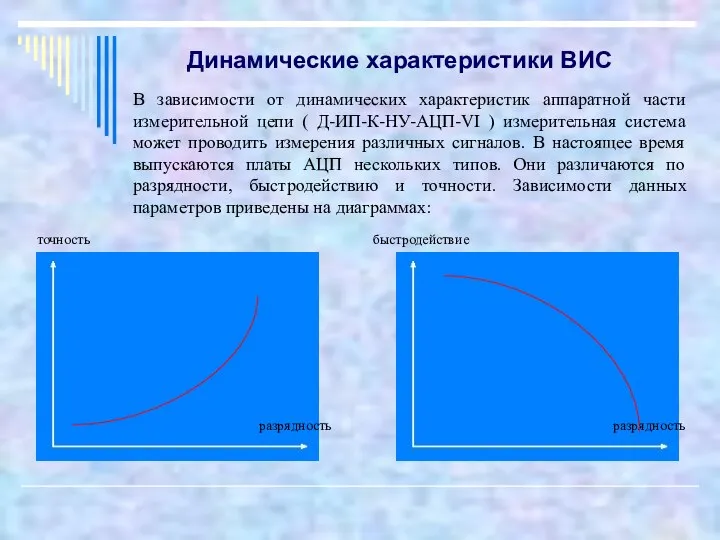
В зависимости от динамических характеристик аппаратной части измерительной цепи ( Д-ИП-К-НУ-АЦП-VI
В зависимости от динамических характеристик аппаратной части измерительной цепи ( Д-ИП-К-НУ-АЦП-VI
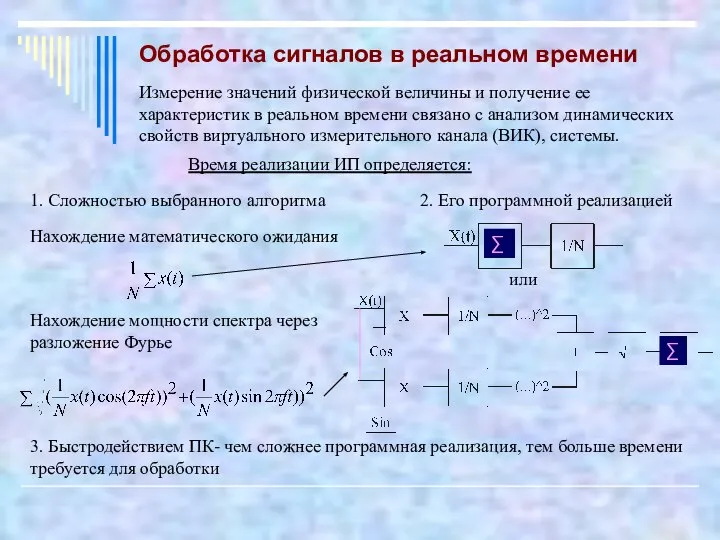
Время реализации ИП определяется:
Обработка сигналов в реальном времени
Измерение значений физической
Время реализации ИП определяется:
Обработка сигналов в реальном времени
Измерение значений физической
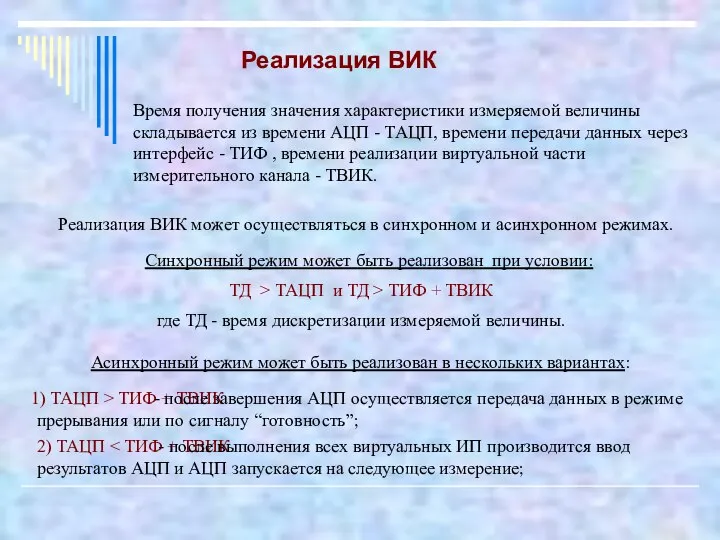
Реализация ВИК может осуществляться в синхронном и асинхронном режимах.
Время получения
Реализация ВИК может осуществляться в синхронном и асинхронном режимах.
Время получения
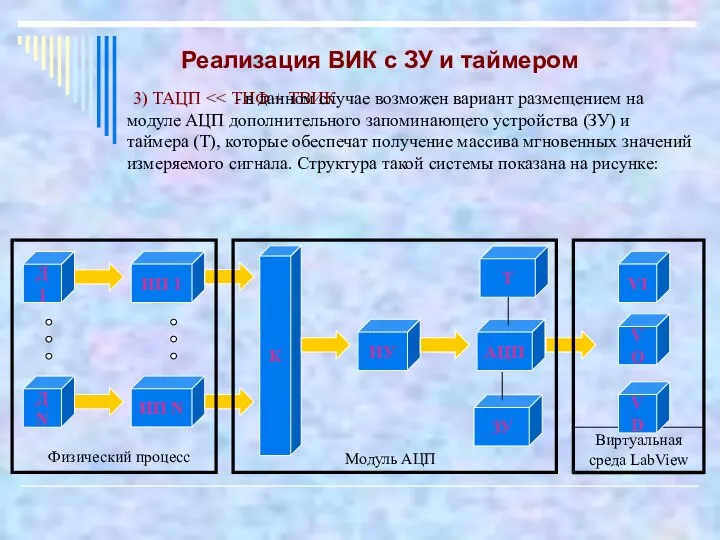
3) ТАЦП << ТИФ + ТВИК
- в данном случае возможен вариант
3) ТАЦП << ТИФ + ТВИК
- в данном случае возможен вариант
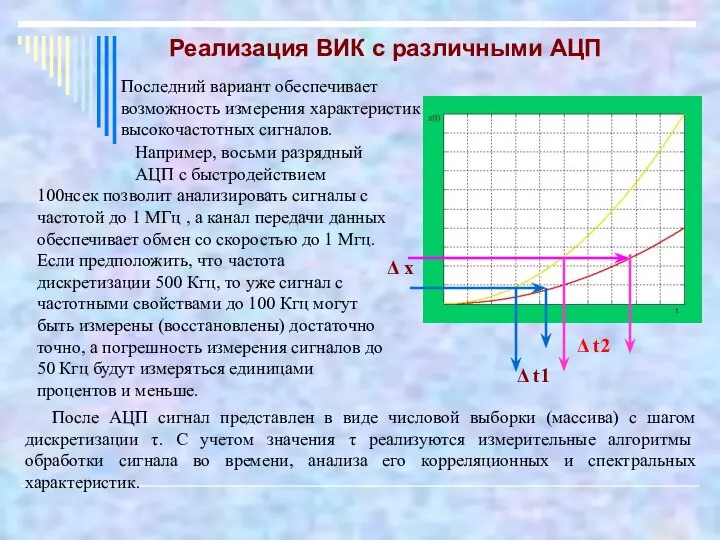
После АЦП сигнал представлен в виде числовой выборки (массива) с шагом
После АЦП сигнал представлен в виде числовой выборки (массива) с шагом
Важной особенностью среды виртуального моделирования является
возможность создания модели не только
Важной особенностью среды виртуального моделирования является
возможность создания модели не только
 Вимірювання потужності i напруженості поля надзвичайно високочастотних (НВЧ) сигналів. (Тема 12.2)
Вимірювання потужності i напруженості поля надзвичайно високочастотних (НВЧ) сигналів. (Тема 12.2) Мобильные сети GSM. (Лекция 11)
Мобильные сети GSM. (Лекция 11) «Портфель достижений учащегося» Выдающиеся личности формируются не посредством красивых речей, а собственным трудом и его резул
«Портфель достижений учащегося» Выдающиеся личности формируются не посредством красивых речей, а собственным трудом и его резул Модуль7 Биполярное расстройство и аддикция
Модуль7 Биполярное расстройство и аддикция  Столицы стран мира
Столицы стран мира  Общая характеристика покрытосеменных
Общая характеристика покрытосеменных  основы педегогики
основы педегогики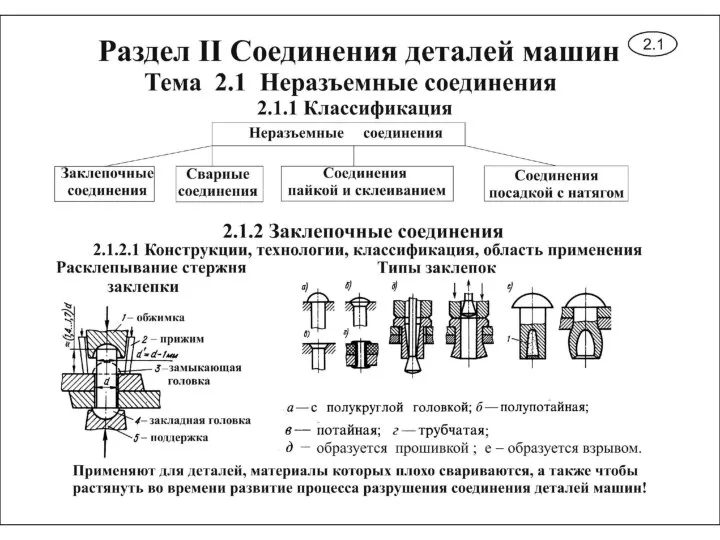 Соединения деталей машин. (Раздел 2)
Соединения деталей машин. (Раздел 2) Лентивирусы
Лентивирусы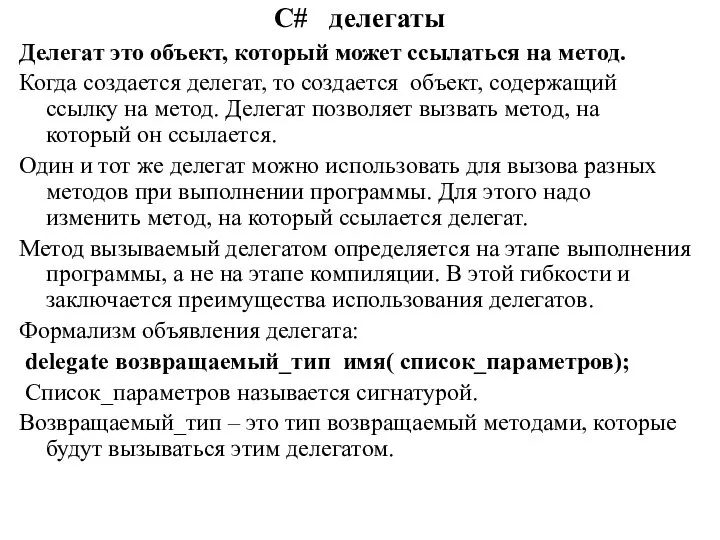 C# делегаты
C# делегаты Презентация Кроссворд по таможенным платежам
Презентация Кроссворд по таможенным платежам Цикл Кребса, как механизм генерации возможных шагов развития крупномасштабной системы на примере университета
Цикл Кребса, как механизм генерации возможных шагов развития крупномасштабной системы на примере университета Заместитель директора по УР О.В. Уфимцева
Заместитель директора по УР О.В. Уфимцева  Leading Supplier of Catering Equipment In UK. Product catalogue
Leading Supplier of Catering Equipment In UK. Product catalogue Разработка экстремального тура по территории Камчатского края
Разработка экстремального тура по территории Камчатского края Терроризм. Типы современного терроризма
Терроризм. Типы современного терроризма Философия, ее предмет, место и роль в жизни человека и общества
Философия, ее предмет, место и роль в жизни человека и общества Адаптация высшего образования РФ к потребностям рынка труда: проблема достоверных сигналов Адаптация высшего образования РФ
Адаптация высшего образования РФ к потребностям рынка труда: проблема достоверных сигналов Адаптация высшего образования РФ  PHONE STAGE
PHONE STAGE Презентация Перемещение припасов
Презентация Перемещение припасов Минская область. Объект №29, 72, 100. Комплексная база по всем видам спорта
Минская область. Объект №29, 72, 100. Комплексная база по всем видам спорта Организационно-правовые формы туристических организаций. Тема 3
Организационно-правовые формы туристических организаций. Тема 3 Об организации взаимодействия органа регистрации прав с органами местного самоуправления
Об организации взаимодействия органа регистрации прав с органами местного самоуправления Мунай газ логистикасы. Мұнай газ саласының логистикалық жүйелері
Мунай газ логистикасы. Мұнай газ саласының логистикалық жүйелері Презентация Руководство по составлению договоров на сооружение промышленных объектов(1973 год)
Презентация Руководство по составлению договоров на сооружение промышленных объектов(1973 год)  Нумерология как Профессия. Авторский курс
Нумерология как Профессия. Авторский курс Исторические особенности развития политической мысли в России
Исторические особенности развития политической мысли в России Маша и медведь Художник Сергий Елена
Маша и медведь Художник Сергий Елена