- Кинематика

Содержание
- 2. Раздел 1. Классическая и релятивистская механика Темы лекций Кинематика поступательного и вращательного движений. Динамика поступательного движения.
- 3. Основная литература: учебники 1. Савельев И.В. Курс общей физики: Т.1. Механика. Молекулярная физика.– М.: Наука, 1987.–
- 4. Дополнительная литература по теоретической части 1. Калистратова Л.Ф., Гладенко А.А., Ярош Э.М. Основы классической и релятивистской
- 5. Литература для практических и домашних заданий 1. Бердинская Н.В., Нижникова О.В., Ясько С.С. Кинематика и динамика
- 6. 3. Калистратова Л.Ф., Волкова В.К., Лях О.В., Павловская О.Ю. Физика – 1. Методические указания для аудиторных
- 7. Литература для подготовки к тестовой сдаче коллоквиума 1. Калистратова Л.Ф., Калистратова Н.П., Прокудина Н.А. Кинематика поступательного
- 8. 3. Павловская О.Ю., Туровец А.Г., Ясько С.С., Калистратова Н.П. Законы сохранения. - Тестовые задания. - Омск:
- 9. Тема 1. Кинематика поступательного и вращательного движений План лекции 1.1. Введение. 1.2. Кинематика поступательного движения материальной
- 10. 1.1. ВВЕДЕНИЕ Механическое движение – это процесс изменения расположения тел или их частей относительно друг друга.
- 11. Классическая механика Классическую механику создал И. Ньютон. Он постулировал, что время и пространство абсолютны. Абсолютное пространство
- 12. Классические свойства пространства Абсолютное пространство - трехмерно (имеет три измерения), - непрерывно (его точки могут быть
- 13. Классические свойства времени Абсолютное время - одномерно (имеет одно измерение), - непрерывно (два его мгновения могут
- 14. Релятивистская и квантовая механики В начале ХХ века классическая механика подверглась кардинальному пересмотру. В результате была
- 15. Теория относительности Теория относительности установила: 1) пространство и время не являются самостоятельными объектами; 2) пространство и
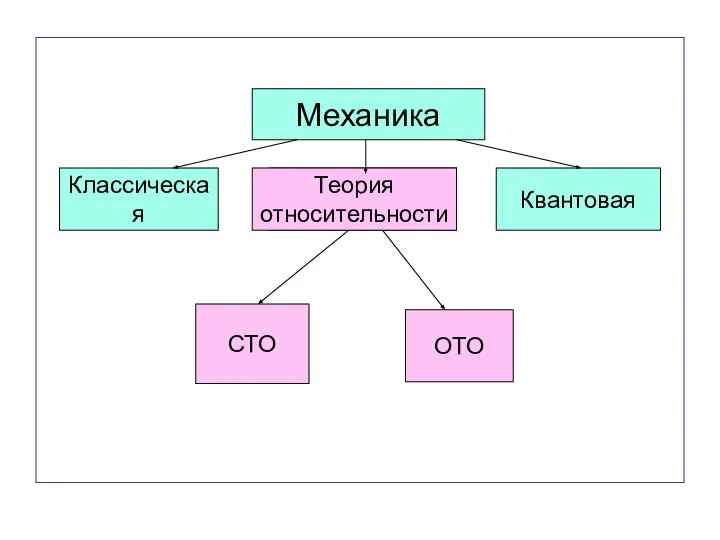
- 16. Механика Классическая Квантовая Теория относительности СТО ОТО
- 17. Объекты механики Макроскопические тела, движущиеся с малыми скоростями, изучает классическая механика. Макроскопические тела (макрочастицы), движущиеся с
- 18. Микроскопические тела (микрочастицы), движущиеся с большими, но нерелятивистскими скоростями, изучает квантовая механика. Микрочастицы, движущиеся с релятивистскими
- 19. Разделы механики Механика состоит из трех разделов – кинематики, динамики и статики. Кинематика изучает виды движений,
- 20. Основные понятия механики Движение – изменение положения тел друг относительно друга. Тело отсчёта - тело, по
- 21. 1.2. Кинематика поступательного движения материальной точки Описать движение материальной точки – значит знать её положение относительно
- 22. Радиус-вектор Радиус-вектор - соединяет движущуюся материальную точку с центром координат и задаёт положение этой точки в
- 23. Спроецируем на оси координат: - орты осей Х,У,Z
- 25. – проекции вектора на эти оси. X, У, Z называются декартовыми координатами материальной точки. Модуль радиус-вектора
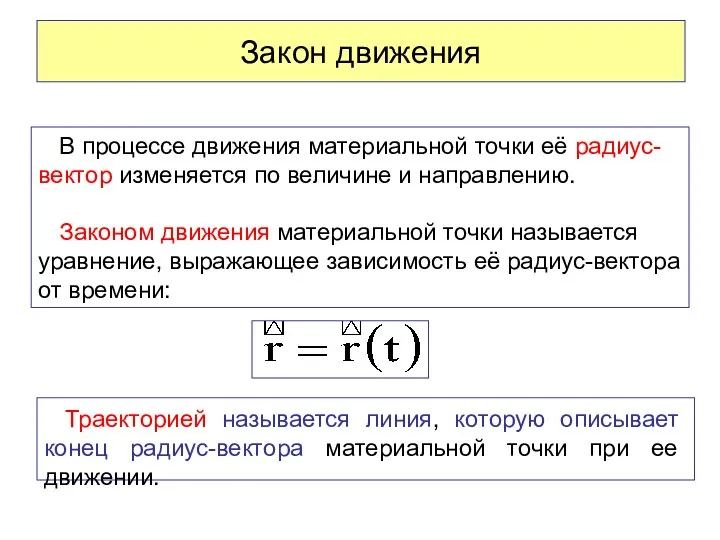
- 26. Закон движения В процессе движения материальной точки её радиус-вектор изменяется по величине и направлению. Законом движения
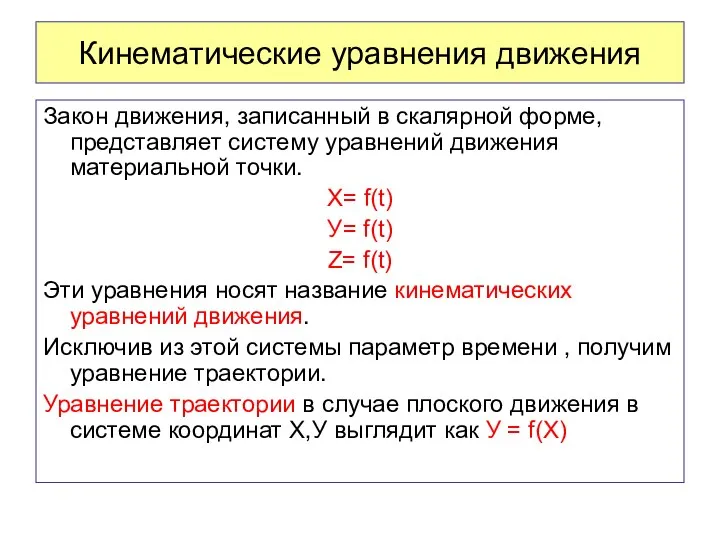
- 27. Кинематические уравнения движения Закон движения, записанный в скалярной форме, представляет систему уравнений движения материальной точки. Х=
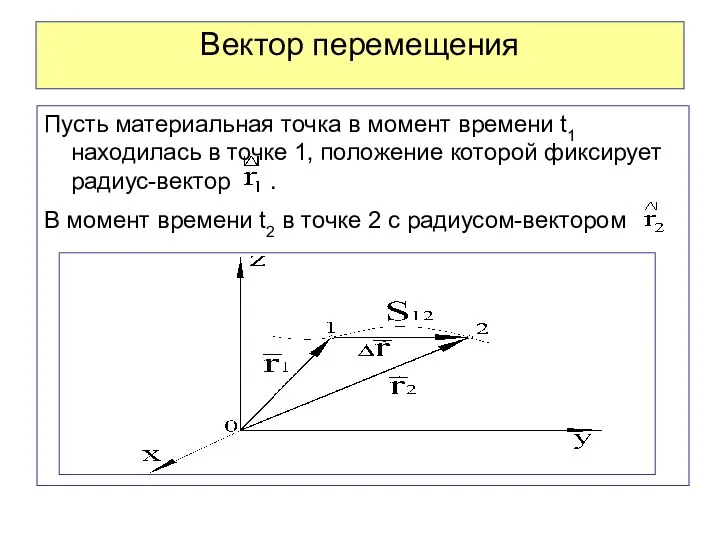
- 28. Вектор перемещения Пусть материальная точка в момент времени t1 находилась в точке 1, положение которой фиксирует
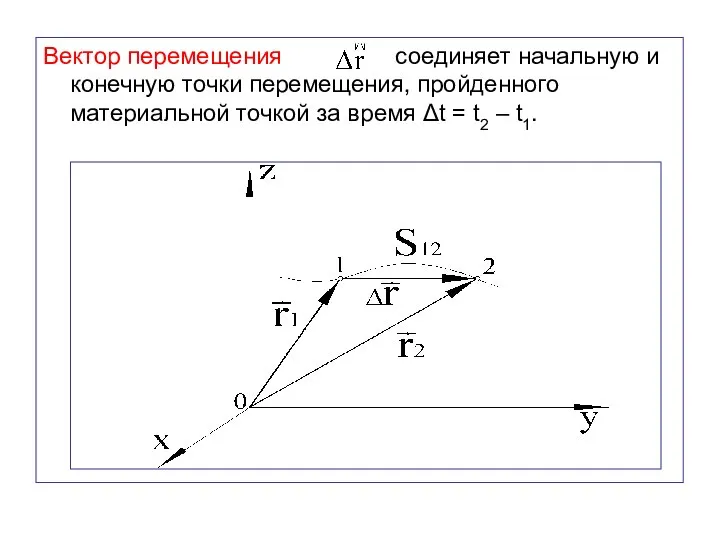
- 29. Вектор перемещения соединяет начальную и конечную точки перемещения, пройденного материальной точкой за время Δt = t2
- 30. Путь и перемещение - приращение радиуса – вектора. Перемещением называется модуль вектора перемещения. Путь - расстояние
- 32. Элементарные путь и перемещение Элементарное перемещение за бесконечно малый промежуток времени dt обозначается . Элементарный путь
- 33. Перемещение по траектории из точки 1 в точку 2 можно представить как сумму бесконечно большого числа
- 34. Вектор перемещения получим, просуммировав элементарные перемещения:
- 35. При интегрировании (суммировании) модулей элементарных перемещений получим путь.
- 36. Скорость Скорость характеризует быстроту изменения пространственного положения материальной точки. Скорость равна перемещению, совершенному точкой за единицу
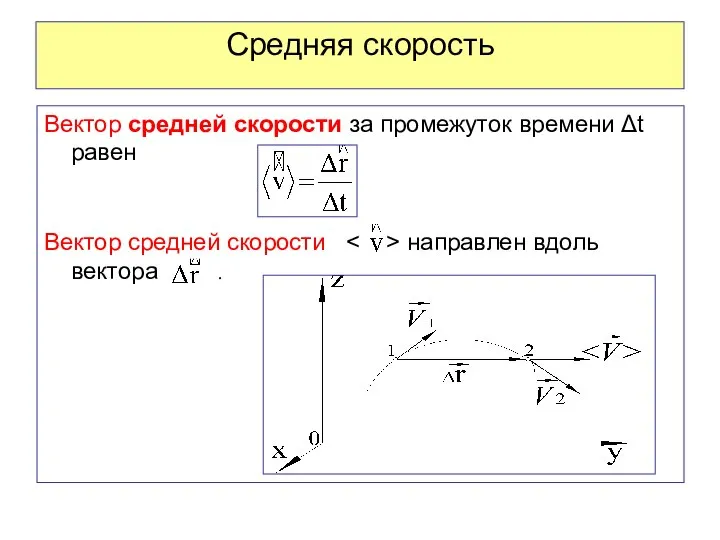
- 37. Средняя скорость Вектор средней скорости за промежуток времени Δt равен Вектор средней скорости направлен вдоль вектора
- 38. Среднее значение модуля скорости равно Среднее значение модуля скорости - скалярная величина. S
- 39. При движении средняя скорость изменяет направление и величину.
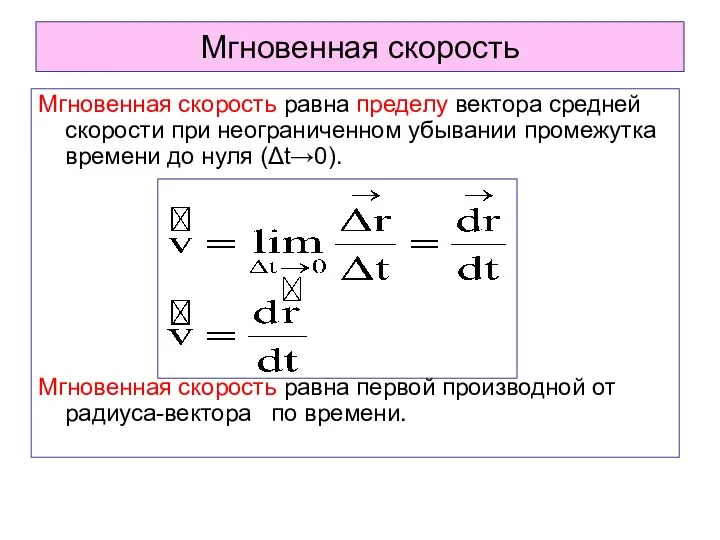
- 40. Мгновенная скорость Мгновенная скорость равна пределу вектора средней скорости при неограниченном убывании промежутка времени до нуля
- 41. Вектор мгновенной скорости направлен по вектору , т. е. по касательной к траектории. Модуль мгновенной скорости
- 42. Направление средней и мгновенной скоростей
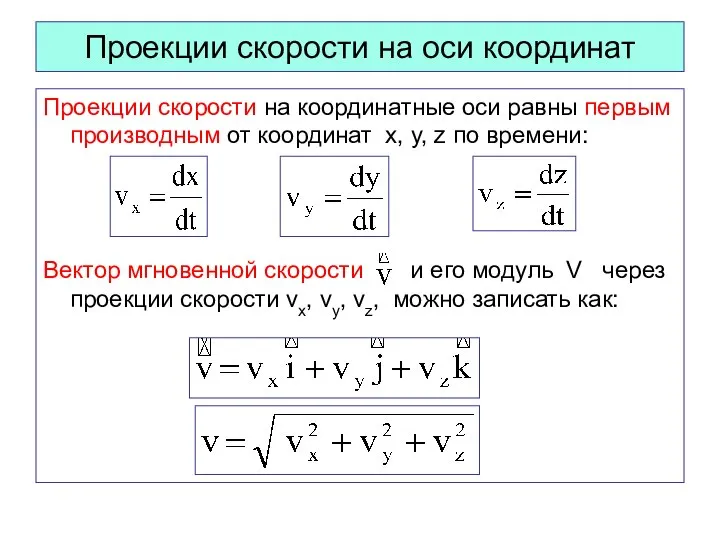
- 43. Проекции скорости на оси координат Проекции скорости на координатные оси равны первым производным от координат x,
- 44. Ускорение В процессе движения материальной точки модуль и направление её скорости в общем случае изменяются. Ускорение
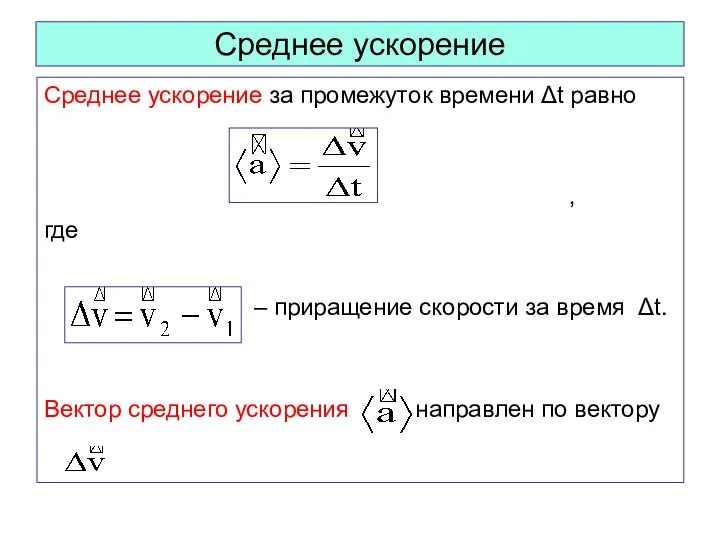
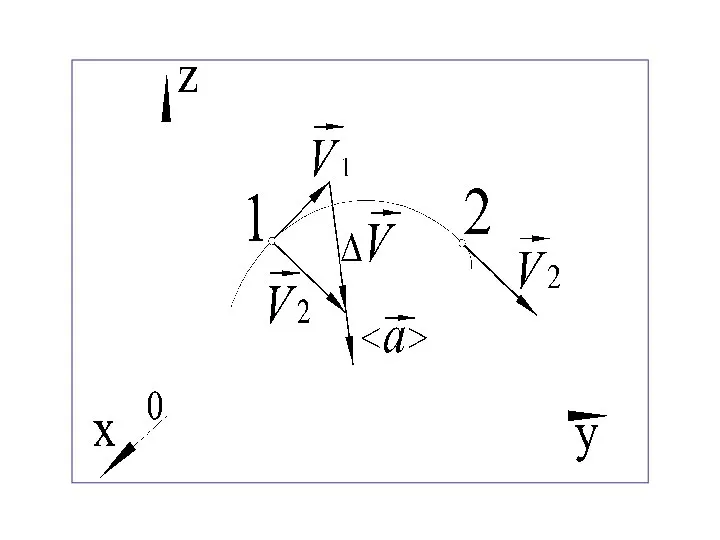
- 45. Среднее ускорение Среднее ускорение за промежуток времени Δt равно , где – приращение скорости за время
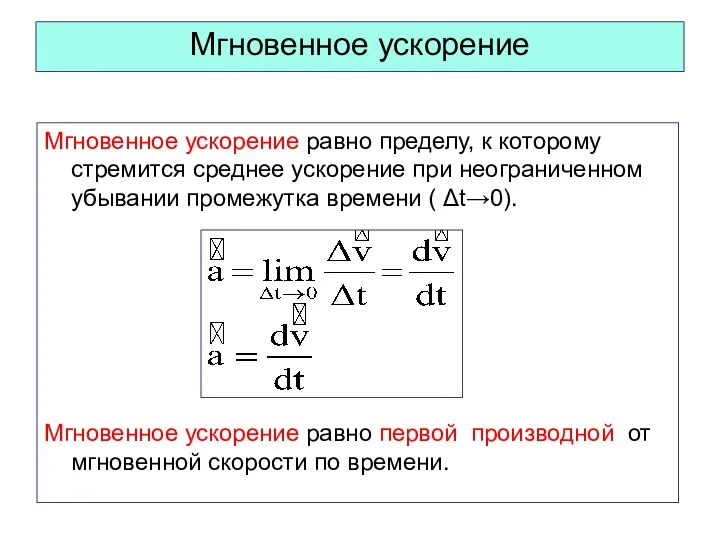
- 47. Мгновенное ускорение Мгновенное ускорение равно пределу, к которому стремится среднее ускорение при неограниченном убывании промежутка времени
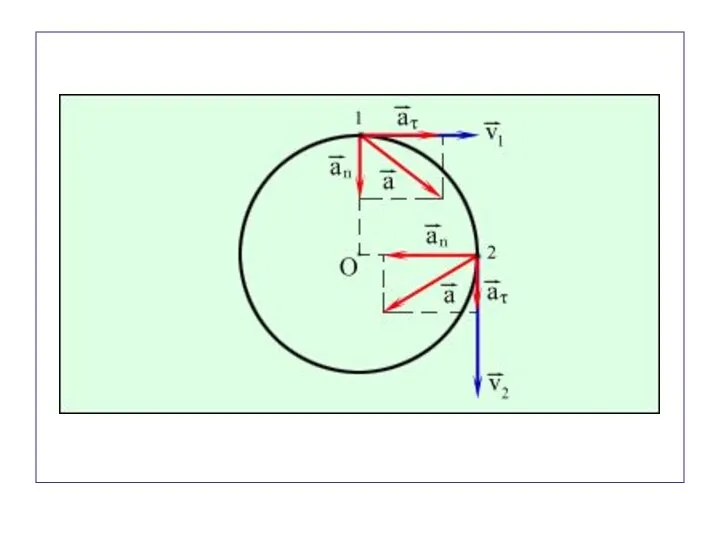
- 48. Направление вектора мгновенного ускорения совпадает с направлением вектора , который направлен по касательной к траектории. Направление
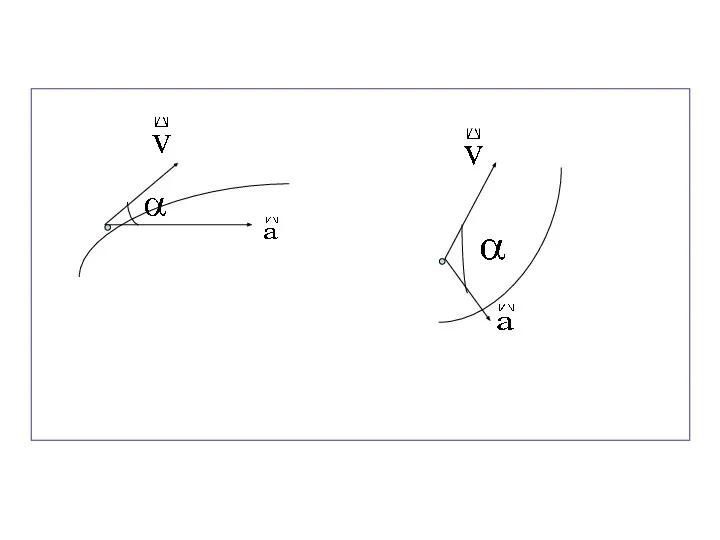
- 49. Вектор ускорения по отношению к вектору скорости может занять любое положение под углом .
- 50. Если угол - острый, то движение материальной точки будет являться ускоренным. В пределе острый угол равен
- 51. Проекции ускорения Проекции вектора ускорения на координатные оси: Вектор мгновенного ускорения и его модуль а можно
- 52. Обратная задача кинематики В рамках кинематики решаются две основные задачи: прямая и обратная. При решении прямой
- 53. При решении обратной задачи по известной зависимости ускорения от времени , находят положение материальной точки на
- 54. Нахождение скорости Из определения ускорения имеем Проинтегрируем или Получим (1)
- 55. Нахождение положения точки Из определения скорости следует, что элементарное перемещение равно Подставим сюда полученное равенство (1)
- 56. Равномерное движение Рассмотрим частные случаи. Равномерное прямолинейное движение (ускорение = 0 и t0 = 0). Тогда
- 57. Равноускоренное движение 2. Равнопеременное прямолинейное движение (ускорение = const и t0 = 0). Тогда Полученное выражение,
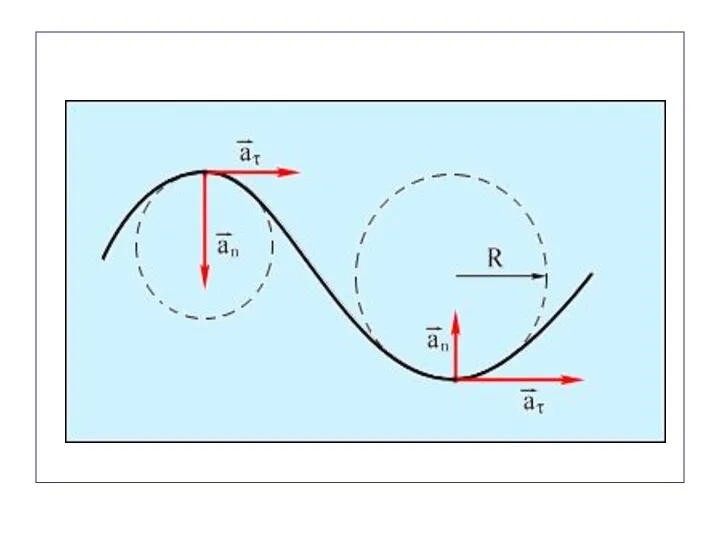
- 58. 1.3. Тангенциальное и нормальное ускорения Пусть материальная точка движется по криволинейной траектории, имея различную скорость в
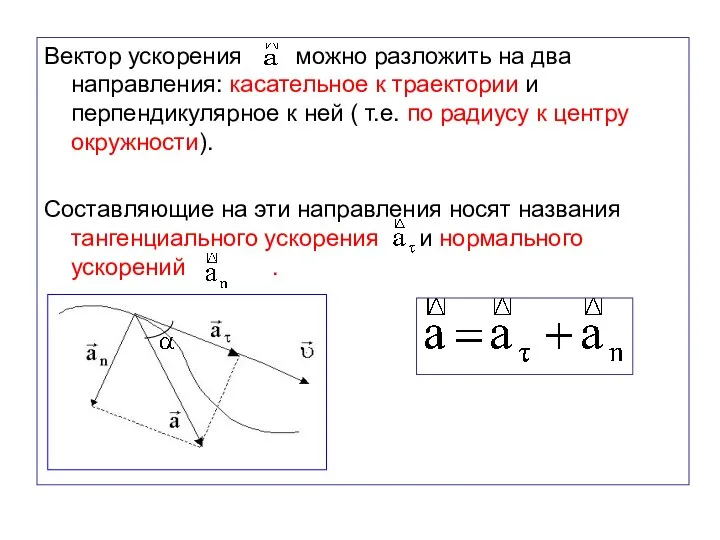
- 60. Вектор ускорения можно разложить на два направления: касательное к траектории и перпендикулярное к ней ( т.е.
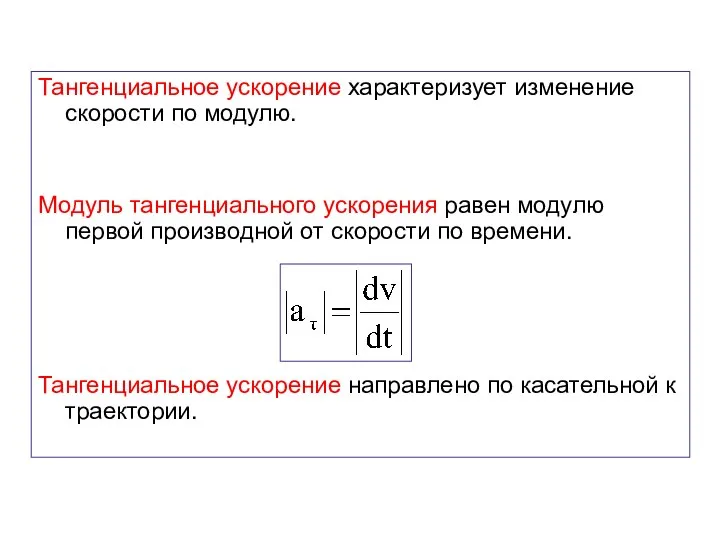
- 61. Тангенциальное ускорение характеризует изменение скорости по модулю. Модуль тангенциального ускорения равен модулю первой производной от скорости
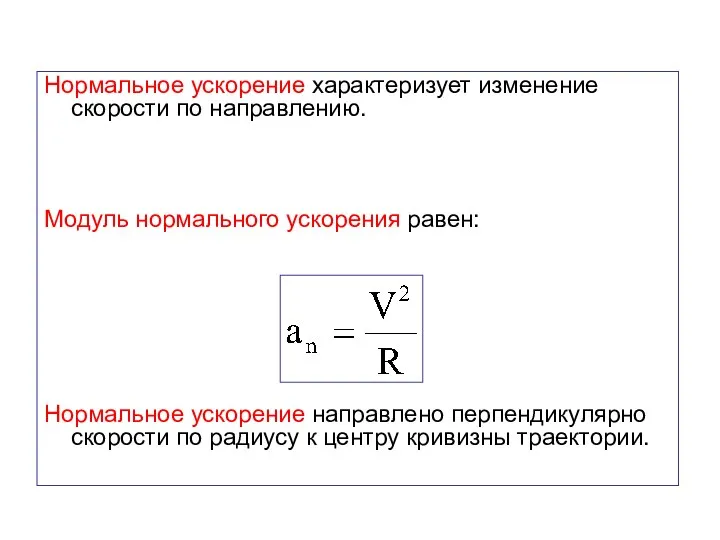
- 62. Нормальное ускорение характеризует изменение скорости по направлению. Модуль нормального ускорения равен: Нормальное ускорение направлено перпендикулярно скорости
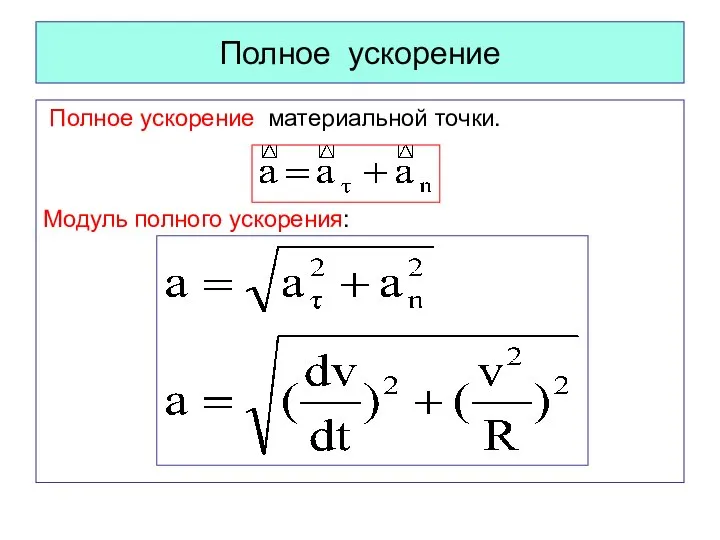
- 63. Полное ускорение Полное ускорение материальной точки. Модуль полного ускорения:
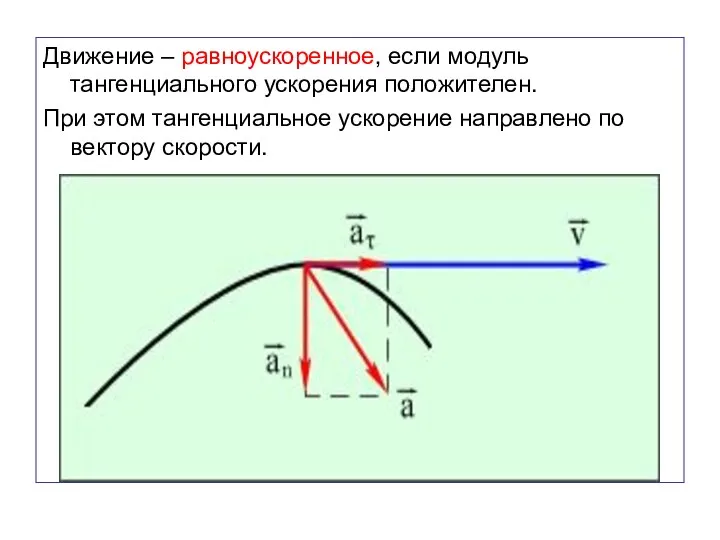
- 64. Движение – равноускоренное, если модуль тангенциального ускорения положителен. При этом тангенциальное ускорение направлено по вектору скорости.
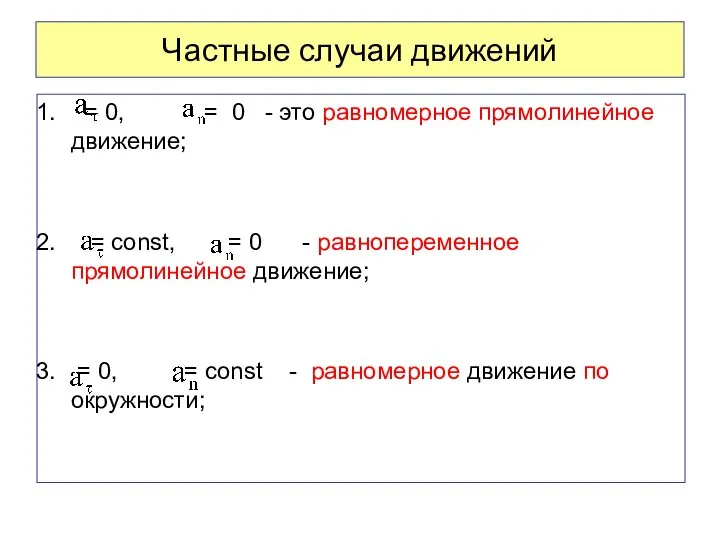
- 65. Частные случаи движений = 0, = 0 - это равномерное прямолинейное движение; = const, = 0
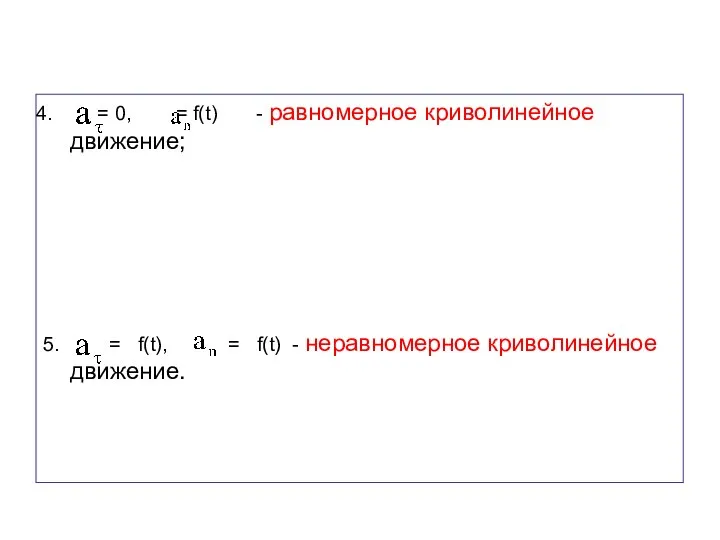
- 66. = 0, = f(t) - равномерное криволинейное движение; 5. = f(t), = f(t) - неравномерное криволинейное
- 67. 1.4. Кинематика вращательного движения твердого тела Любое движение абсолютно твердого тела может быть сведено к сумме
- 68. При поступательном движении все точки тела движутся одинаково, поэтому движение тела можно охарактеризовать движением одной точки(например,
- 69. Вращательным движением твердого тела вокруг неподвижной оси называется такое движение, при котором все точки тела движутся
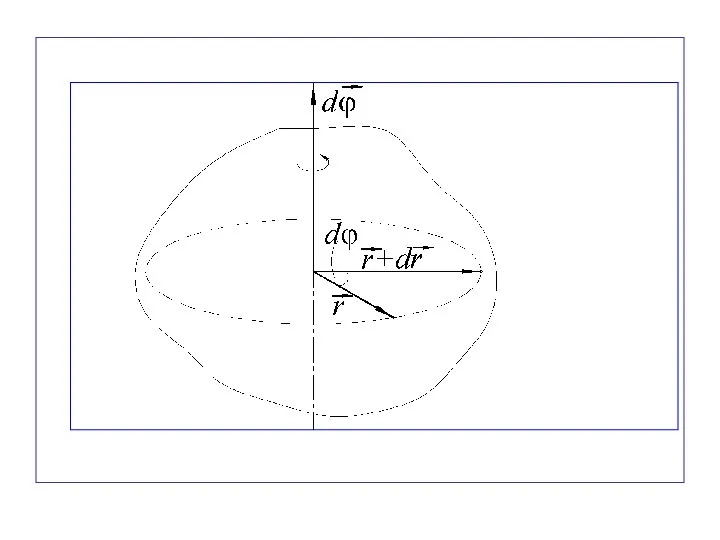
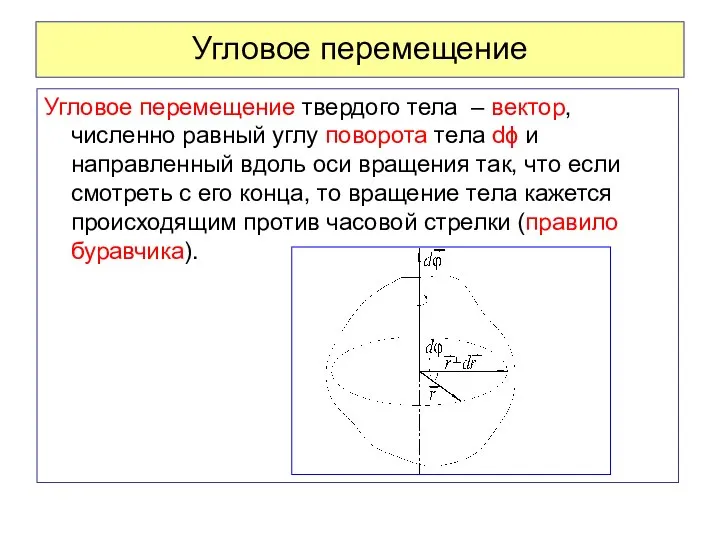
- 71. Угловое перемещение Угловое перемещение твердого тела – вектор, численно равный углу поворота тела dϕ и направленный
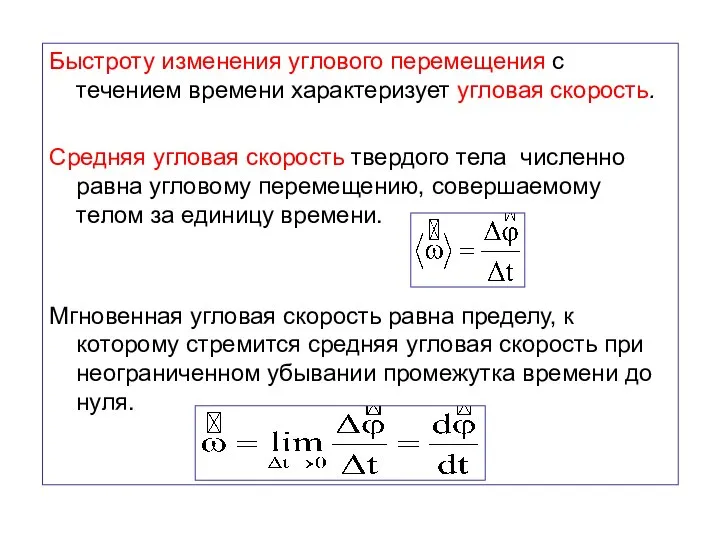
- 72. Быстроту изменения углового перемещения с течением времени характеризует угловая скорость. Средняя угловая скорость твердого тела численно
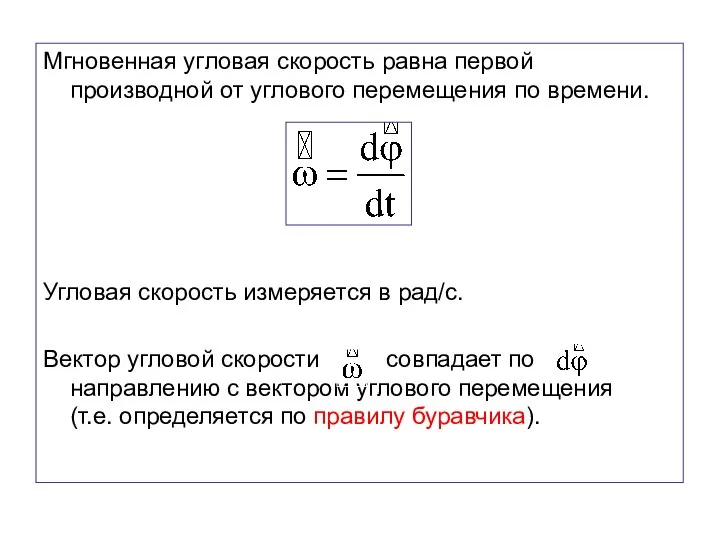
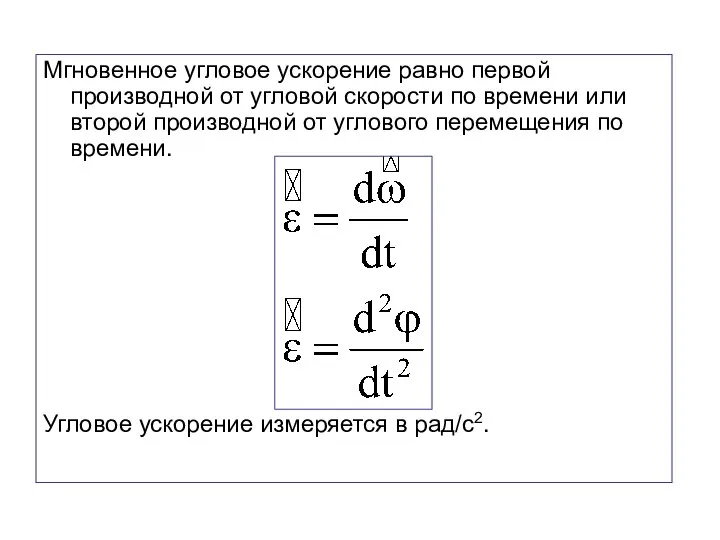
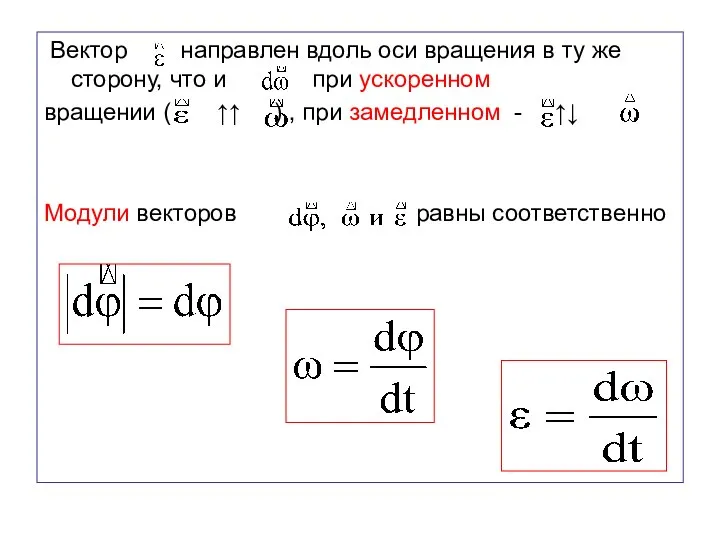
- 73. Мгновенная угловая скорость равна первой производной от углового перемещения по времени. Угловая скорость измеряется в рад/с.
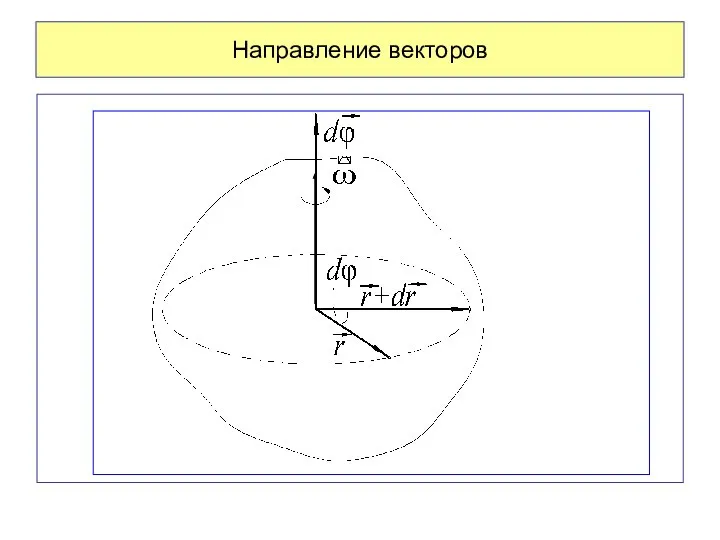
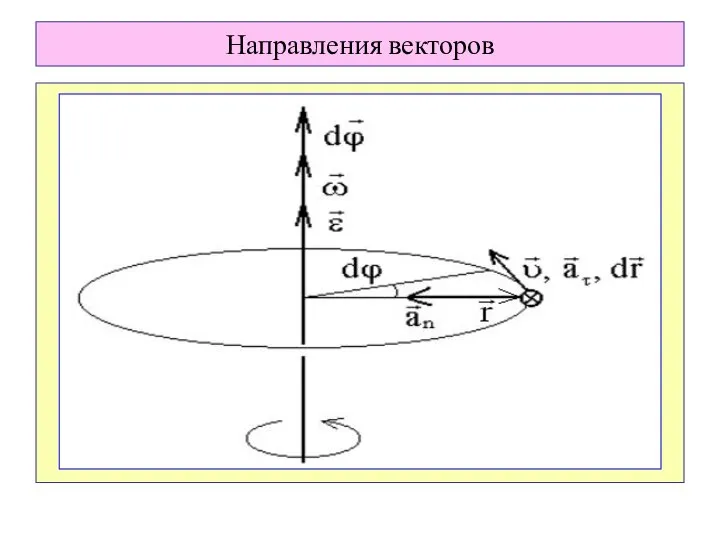
- 74. Направление векторов
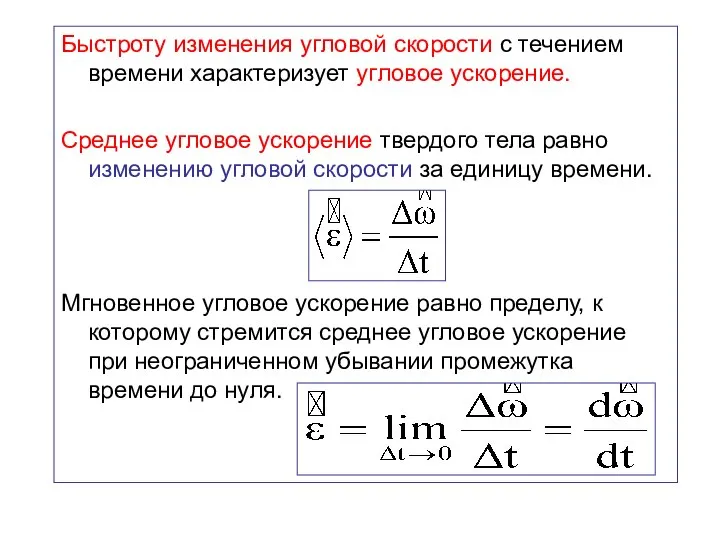
- 75. Быстроту изменения угловой скорости с течением времени характеризует угловое ускорение. Среднее угловое ускорение твердого тела равно
- 76. Мгновенное угловое ускорение равно первой производной от угловой скорости по времени или второй производной от углового
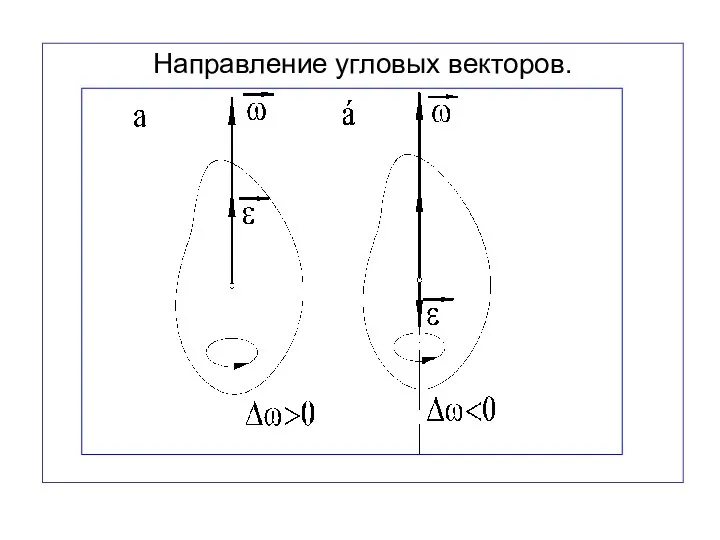
- 77. Направление угловых векторов.
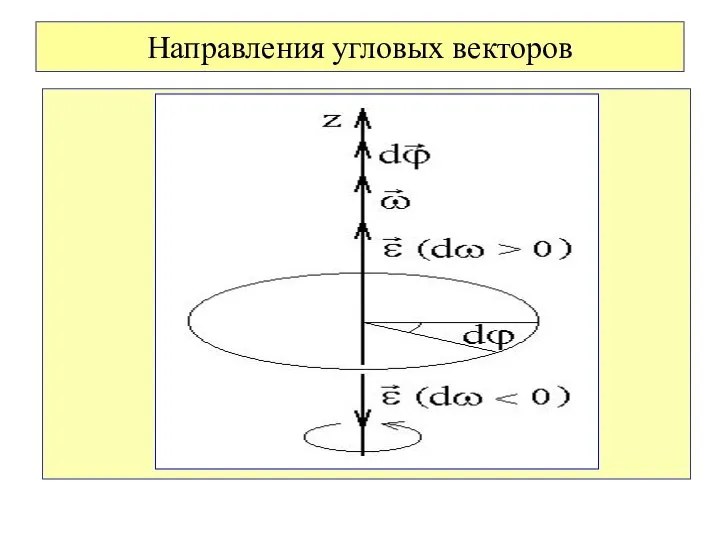
- 78. Направления угловых векторов
- 79. Вектор направлен вдоль оси вращения в ту же сторону, что и при ускоренном вращении ( ↑↑
- 80. Обратная задача кинематики при вращательном движении При вращательном движении обратная задача кинематики выполняется при следующих формулах:
- 81. При равномерном вращении: ε = 0, ω = const, ϕ = ωt. При равнопеременном вращении: ε
- 82. Период и частота вращения Для характеристики равномерного вращательного движения используются следующие величины. Период вращения Т –
- 83. 1.5. Взаимосвязь угловых и линейных величин Кроме угловых величин: углового перемещения, угловой скорости и углового ускорения
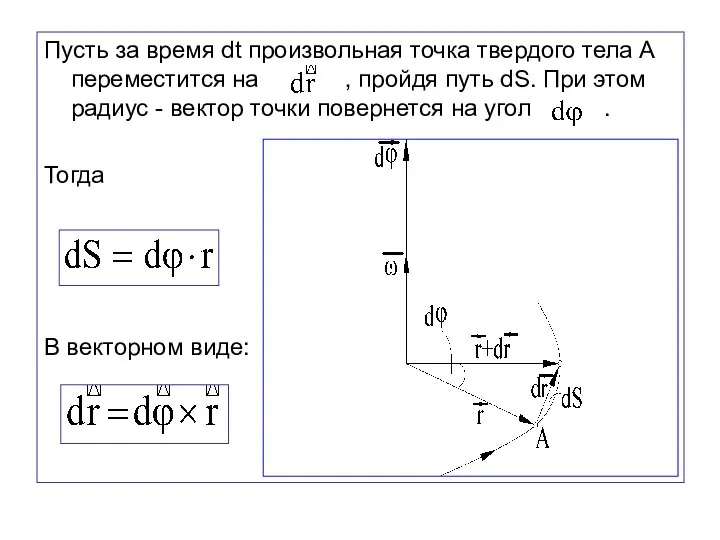
- 84. Пусть за время dt произвольная точка твердого тела А переместится на , пройдя путь dS. При
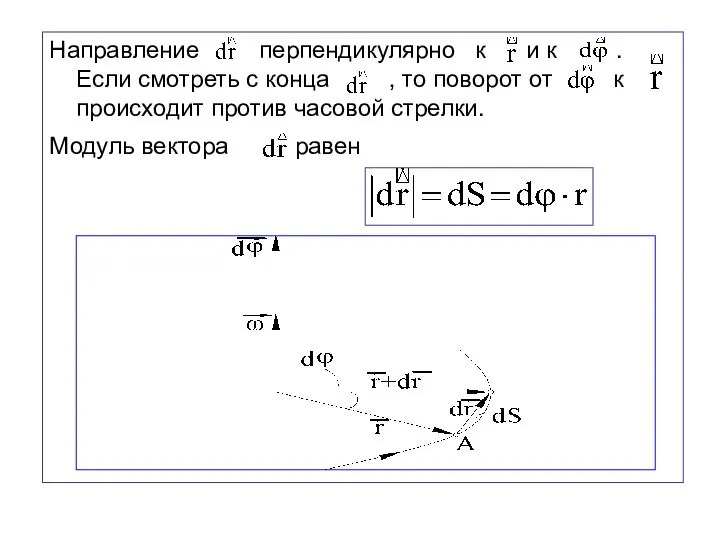
- 85. Направление перпендикулярно к и к . Если смотреть с конца , то поворот от к происходит
- 86. Направления векторов
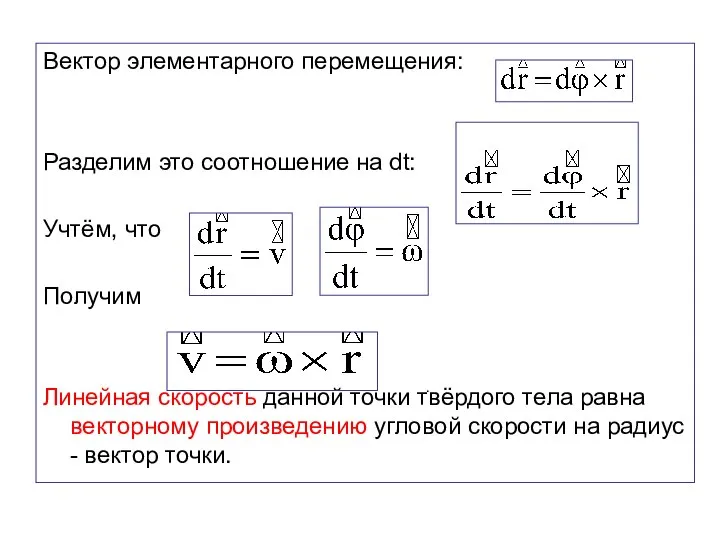
- 87. Вектор элементарного перемещения: Разделим это соотношение на dt: Учтём, что Получим Линейная скорость данной точки твёрдого
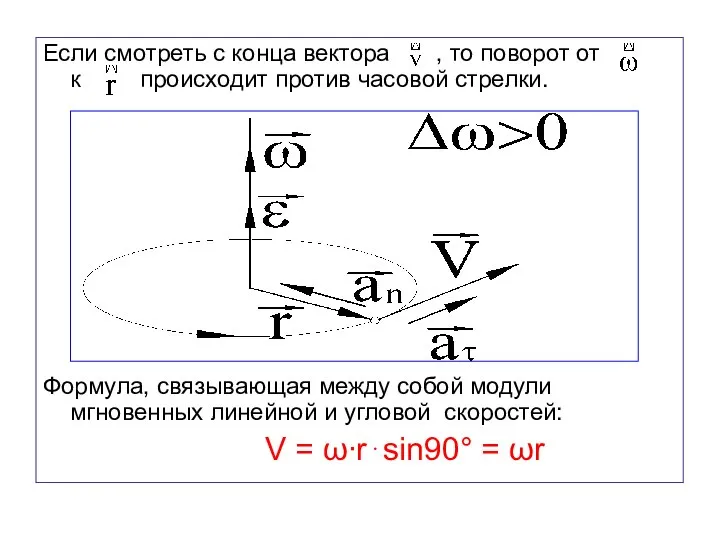
- 88. Если смотреть с конца вектора , то поворот от к происходит против часовой стрелки. Формула, связывающая
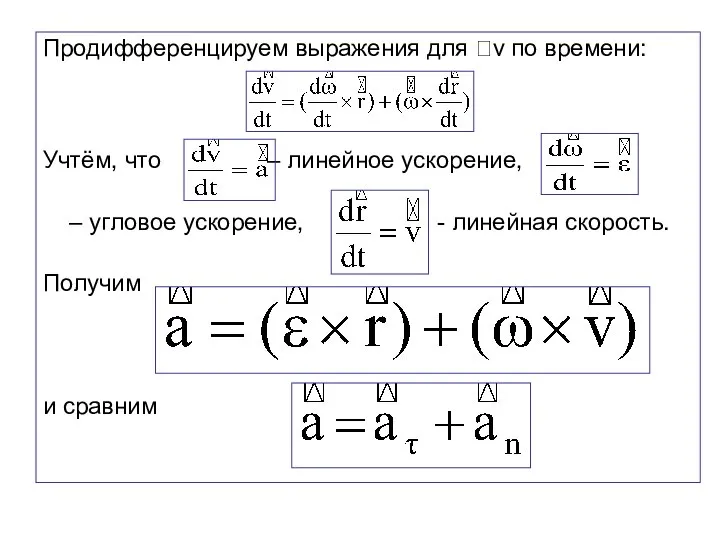
- 89. Продифференцируем выражения для v по времени: Учтём, что – линейное ускорение, – угловое ускорение, - линейная
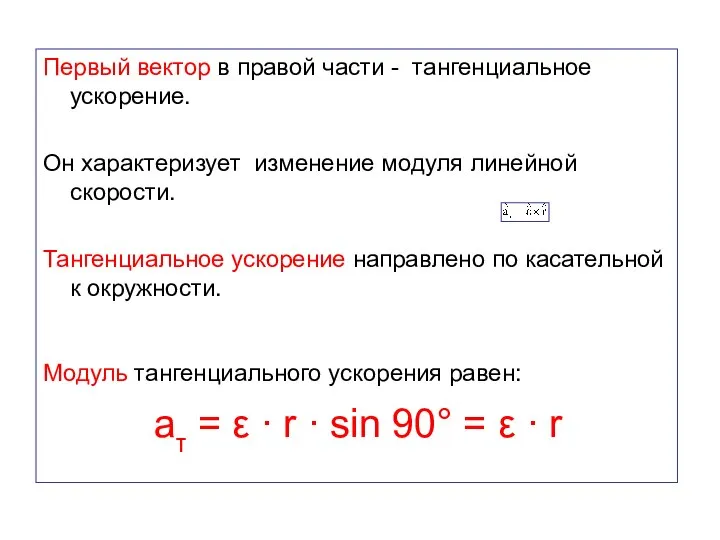
- 90. Первый вектор в правой части - тангенциальное ускорение. Он характеризует изменение модуля линейной скорости. Тангенциальное ускорение
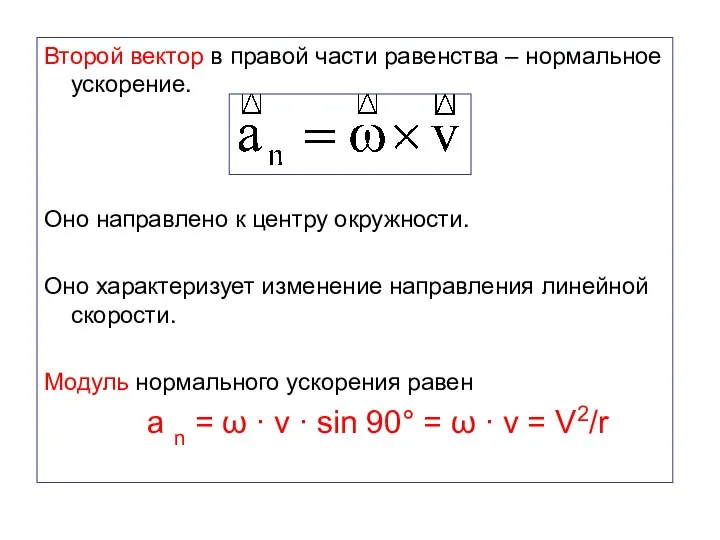
- 91. Второй вектор в правой части равенства – нормальное ускорение. Оно направлено к центру окружности. Оно характеризует
- 94. Сравнительная таблица формул Движение Поступательное Вращательное Равномерное S = Vt ϕ = ωt V = const
- 96. Скачать презентацию
Раздел 1.
Классическая и релятивистская
механика
Темы лекций
Кинематика поступательного и вращательного движений.
Динамика
Раздел 1.
Классическая и релятивистская
механика
Темы лекций
Кинематика поступательного и вращательного движений.
Динамика
Основная литература: учебники
1. Савельев И.В. Курс общей физики: Т.1. Механика.
Основная литература: учебники
1. Савельев И.В. Курс общей физики: Т.1. Механика.
Дополнительная литература по теоретической части
1. Калистратова Л.Ф., Гладенко А.А., Ярош
Дополнительная литература по теоретической части
1. Калистратова Л.Ф., Гладенко А.А., Ярош
Литература для практических и домашних заданий
1. Бердинская Н.В., Нижникова О.В., Ясько
Литература для практических и домашних заданий
1. Бердинская Н.В., Нижникова О.В., Ясько
3. Калистратова Л.Ф., Волкова В.К., Лях О.В., Павловская О.Ю. Физика
3. Калистратова Л.Ф., Волкова В.К., Лях О.В., Павловская О.Ю. Физика
Литература для подготовки к тестовой сдаче коллоквиума
1. Калистратова Л.Ф., Калистратова Н.П.,
Литература для подготовки к тестовой сдаче коллоквиума
1. Калистратова Л.Ф., Калистратова Н.П.,
3. Павловская О.Ю., Туровец А.Г., Ясько С.С., Калистратова Н.П. Законы сохранения.
3. Павловская О.Ю., Туровец А.Г., Ясько С.С., Калистратова Н.П. Законы сохранения.
Тема 1. Кинематика поступательного и вращательного движений
План лекции
1.1. Введение.
1.2. Кинематика
Тема 1. Кинематика поступательного и вращательного движений
План лекции
1.1. Введение.
1.2. Кинематика
1.1. ВВЕДЕНИЕ
Механическое движение – это процесс изменения расположения тел или их
1.1. ВВЕДЕНИЕ
Механическое движение – это процесс изменения расположения тел или их
Классическая механика
Классическую механику создал И. Ньютон.
Он постулировал, что время и
Классическая механика
Классическую механику создал И. Ньютон.
Он постулировал, что время и
Классические свойства пространства
Абсолютное пространство
- трехмерно (имеет три измерения),
- непрерывно (его
Классические свойства пространства
Абсолютное пространство
- трехмерно (имеет три измерения),
- непрерывно (его
Классические свойства времени
Абсолютное время
- одномерно (имеет одно измерение),
- непрерывно
Классические свойства времени
Абсолютное время
- одномерно (имеет одно измерение),
- непрерывно
Релятивистская и квантовая механики
В начале ХХ века классическая механика подверглась кардинальному
Релятивистская и квантовая механики
В начале ХХ века классическая механика подверглась кардинальному
Теория относительности
Теория относительности установила:
1) пространство и время не являются самостоятельными объектами;
Теория относительности
Теория относительности установила:
1) пространство и время не являются самостоятельными объектами;
Механика
Классическая
Квантовая
Теория
относительности
СТО
ОТО
Механика
Классическая
Квантовая
Теория
относительности
СТО
ОТО
Объекты механики
Макроскопические тела, движущиеся с малыми скоростями, изучает классическая механика.
Макроскопические тела
Объекты механики
Макроскопические тела, движущиеся с малыми скоростями, изучает классическая механика.
Макроскопические тела
Микроскопические тела (микрочастицы), движущиеся с большими, но нерелятивистскими скоростями, изучает квантовая
Микроскопические тела (микрочастицы), движущиеся с большими, но нерелятивистскими скоростями, изучает квантовая
Разделы механики
Механика состоит из трех разделов – кинематики, динамики и статики.
Кинематика
Разделы механики
Механика состоит из трех разделов – кинематики, динамики и статики.
Кинематика
Основные понятия механики
Движение – изменение положения тел друг относительно друга.
Тело отсчёта
Основные понятия механики
Движение – изменение положения тел друг относительно друга.
Тело отсчёта
1.2. Кинематика поступательного движения материальной точки
Описать движение материальной точки – значит
1.2. Кинематика поступательного движения материальной точки
Описать движение материальной точки – значит
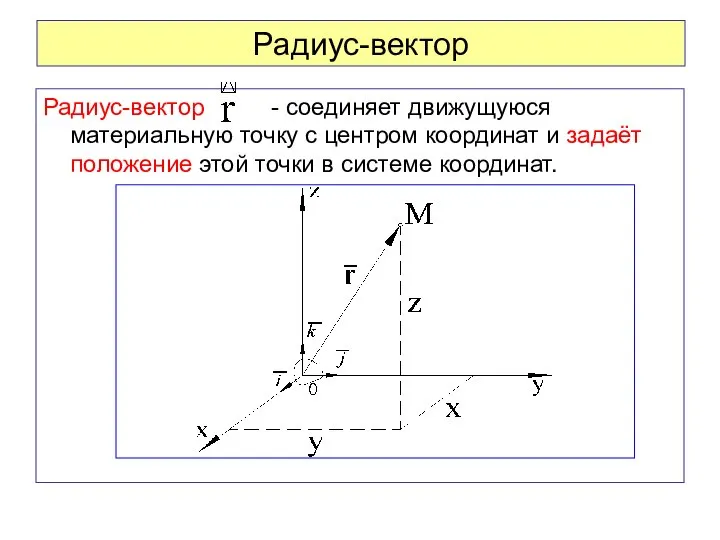
Радиус-вектор
Радиус-вектор - соединяет движущуюся материальную точку с центром координат и задаёт
Радиус-вектор
Радиус-вектор - соединяет движущуюся материальную точку с центром координат и задаёт
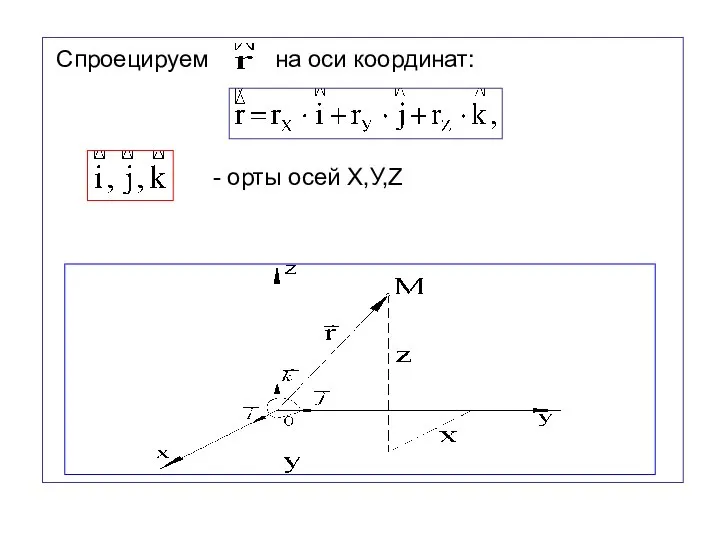
Спроецируем на оси координат:
- орты осей Х,У,Z
Спроецируем на оси координат:
- орты осей Х,У,Z
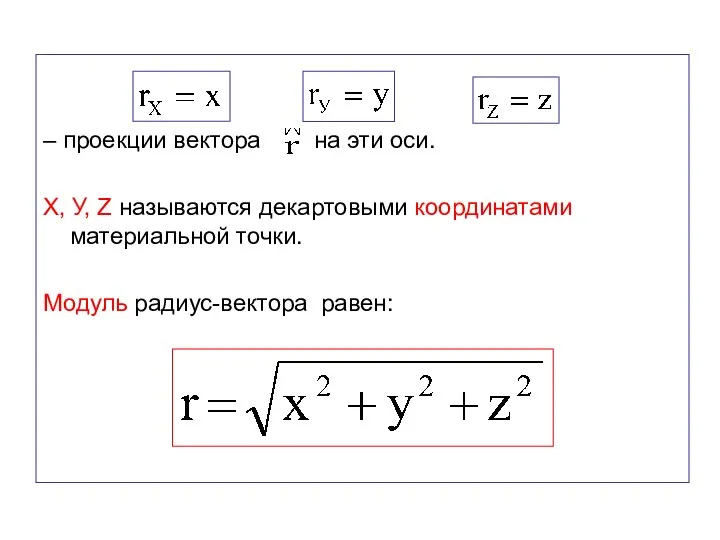
– проекции вектора на эти оси.
X, У, Z называются декартовыми
X, У, Z называются декартовыми
Закон движения
В процессе движения материальной точки её радиус-вектор изменяется по величине
Закон движения
В процессе движения материальной точки её радиус-вектор изменяется по величине
Кинематические уравнения движения
Закон движения, записанный в скалярной форме, представляет систему уравнений
Кинематические уравнения движения
Закон движения, записанный в скалярной форме, представляет систему уравнений
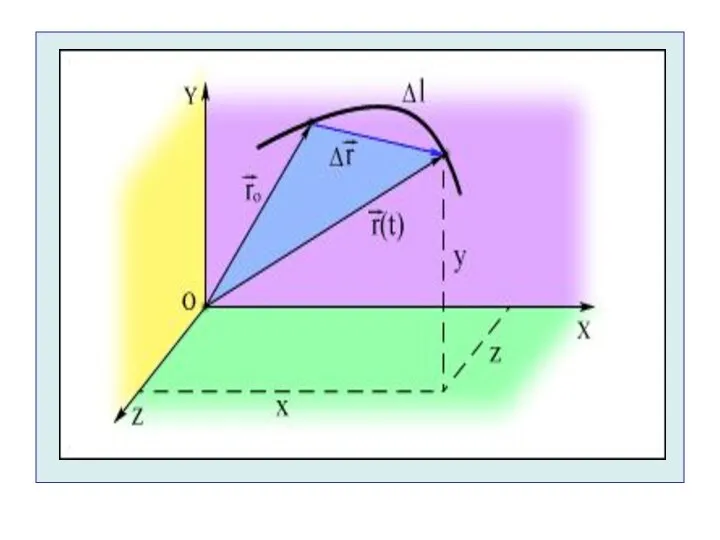
Вектор перемещения
Пусть материальная точка в момент времени t1 находилась в точке
Вектор перемещения
Пусть материальная точка в момент времени t1 находилась в точке
Вектор перемещения соединяет начальную и конечную точки перемещения, пройденного материальной точкой
Вектор перемещения соединяет начальную и конечную точки перемещения, пройденного материальной точкой
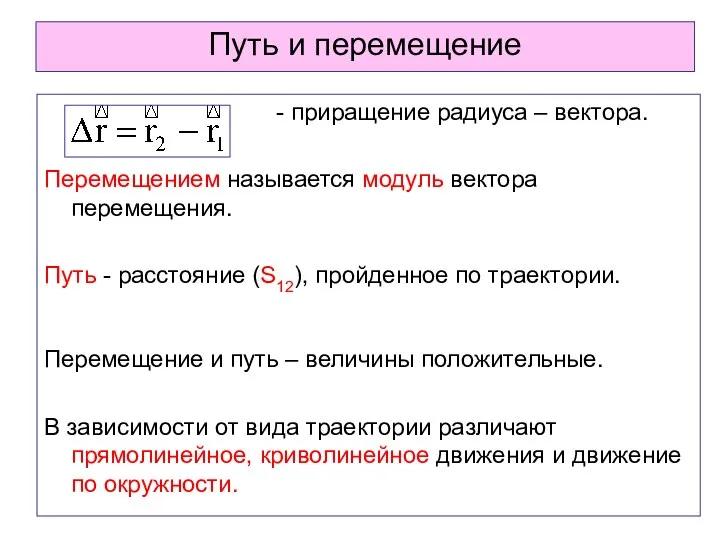
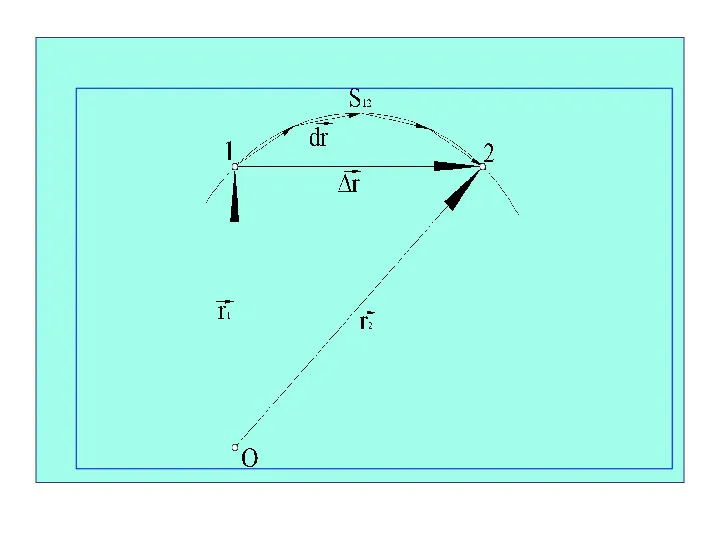
Путь и перемещение
- приращение радиуса – вектора.
Перемещением называется модуль вектора
Путь и перемещение
- приращение радиуса – вектора.
Перемещением называется модуль вектора
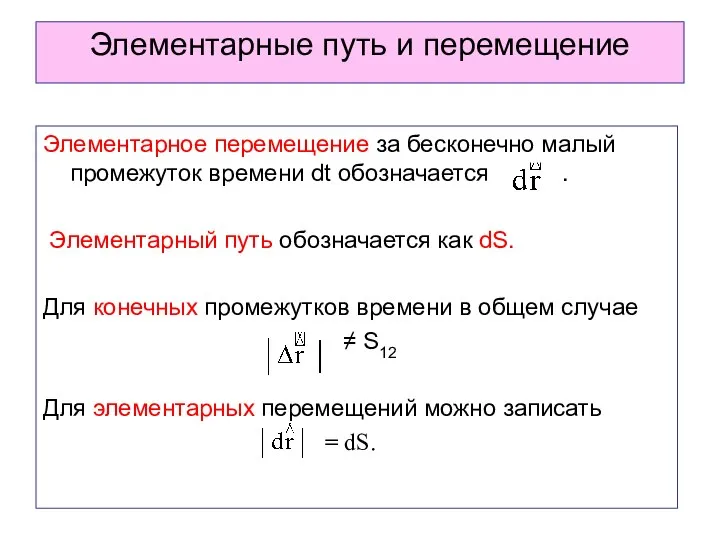
Элементарные путь и перемещение
Элементарное перемещение за бесконечно малый промежуток времени dt
Элементарные путь и перемещение
Элементарное перемещение за бесконечно малый промежуток времени dt
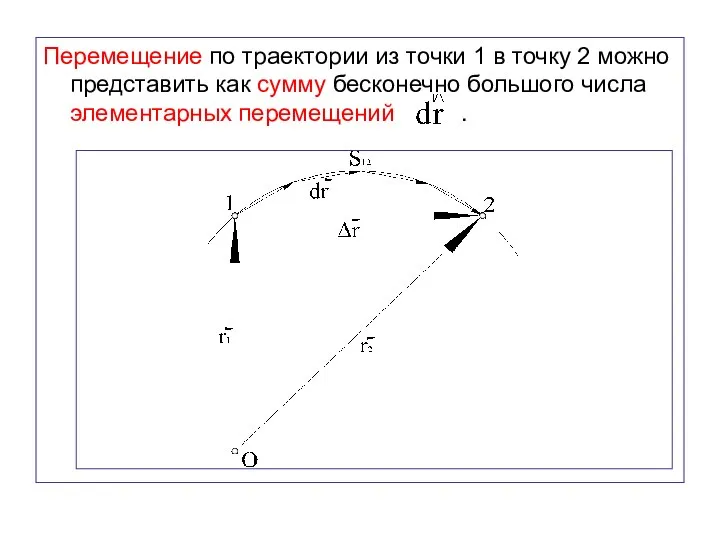
Перемещение по траектории из точки 1 в точку 2 можно представить
Перемещение по траектории из точки 1 в точку 2 можно представить

Вектор перемещения получим, просуммировав элементарные перемещения:
Вектор перемещения получим, просуммировав элементарные перемещения:
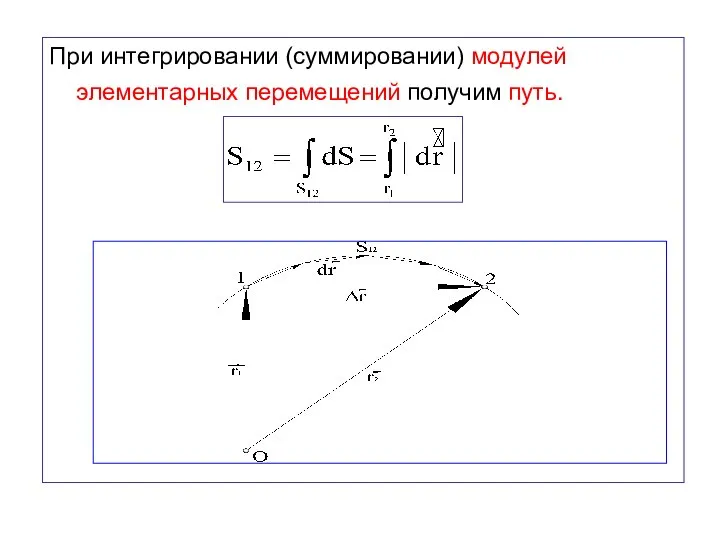
При интегрировании (суммировании) модулей элементарных перемещений получим путь.
При интегрировании (суммировании) модулей элементарных перемещений получим путь.

Скорость
Скорость характеризует быстроту изменения пространственного положения материальной точки.
Скорость равна перемещению, совершенному
Скорость
Скорость характеризует быстроту изменения пространственного положения материальной точки.
Скорость равна перемещению, совершенному
Средняя скорость
Вектор средней скорости за промежуток времени Δt равен
Вектор средней скорости
Средняя скорость
Вектор средней скорости за промежуток времени Δt равен
Вектор средней скорости
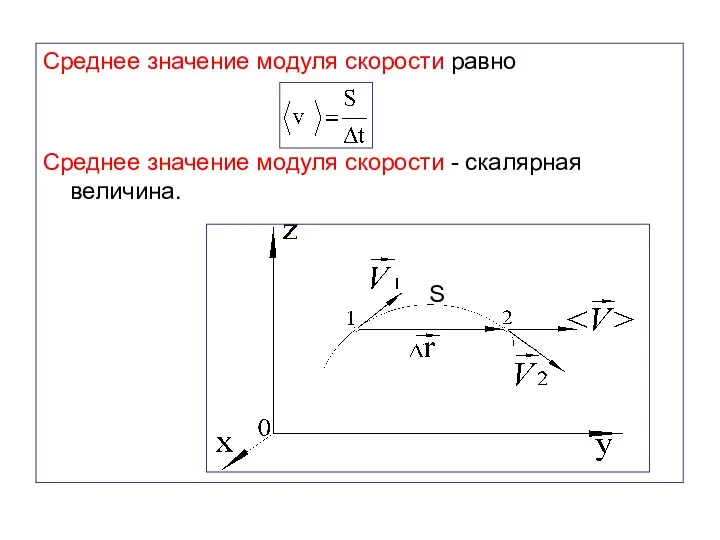
Среднее значение модуля скорости равно
Среднее значение модуля скорости - скалярная величина.
Среднее значение модуля скорости равно
Среднее значение модуля скорости - скалярная величина.
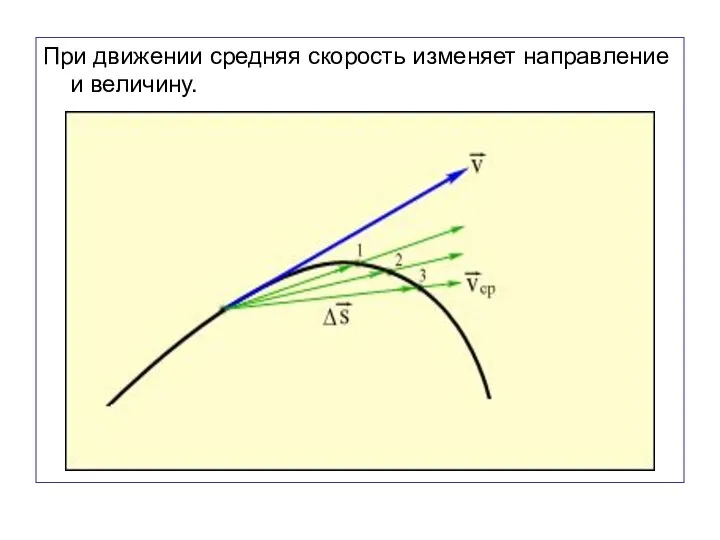
При движении средняя скорость изменяет направление и величину.
При движении средняя скорость изменяет направление и величину.
Мгновенная скорость
Мгновенная скорость равна пределу вектора средней скорости при неограниченном убывании
Мгновенная скорость
Мгновенная скорость равна пределу вектора средней скорости при неограниченном убывании
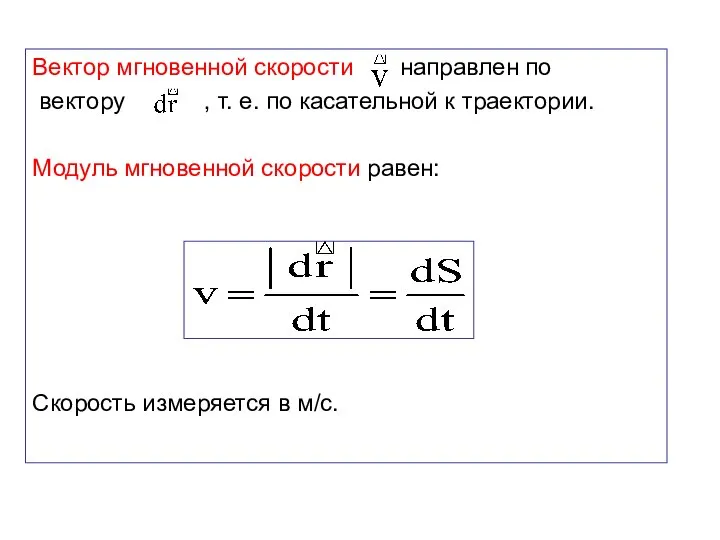
Вектор мгновенной скорости направлен по
вектору , т. е. по касательной
Вектор мгновенной скорости направлен по
вектору , т. е. по касательной
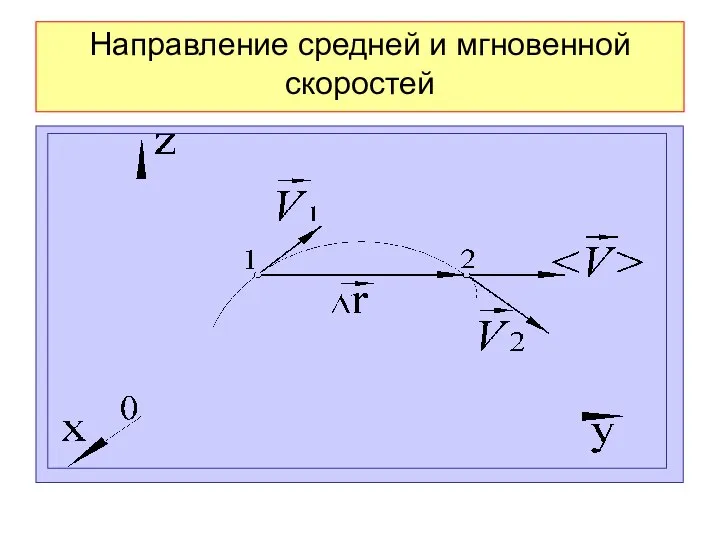
Направление средней и мгновенной скоростей
Направление средней и мгновенной скоростей
Проекции скорости на оси координат
Проекции скорости на координатные оси равны первым
Проекции скорости на оси координат
Проекции скорости на координатные оси равны первым
Ускорение
В процессе движения материальной точки модуль и направление её скорости в
Ускорение
В процессе движения материальной точки модуль и направление её скорости в
Среднее ускорение
Среднее ускорение за промежуток времени Δt равно
,
где
– приращение скорости
Среднее ускорение
Среднее ускорение за промежуток времени Δt равно
,
где
– приращение скорости
Мгновенное ускорение
Мгновенное ускорение равно пределу, к которому стремится среднее ускорение при
Мгновенное ускорение
Мгновенное ускорение равно пределу, к которому стремится среднее ускорение при
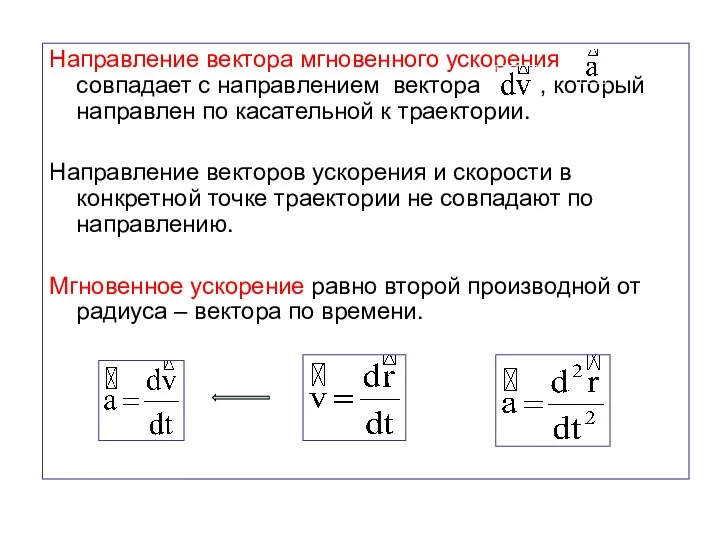
Направление вектора мгновенного ускорения совпадает с направлением вектора , который направлен
Направление вектора мгновенного ускорения совпадает с направлением вектора , который направлен
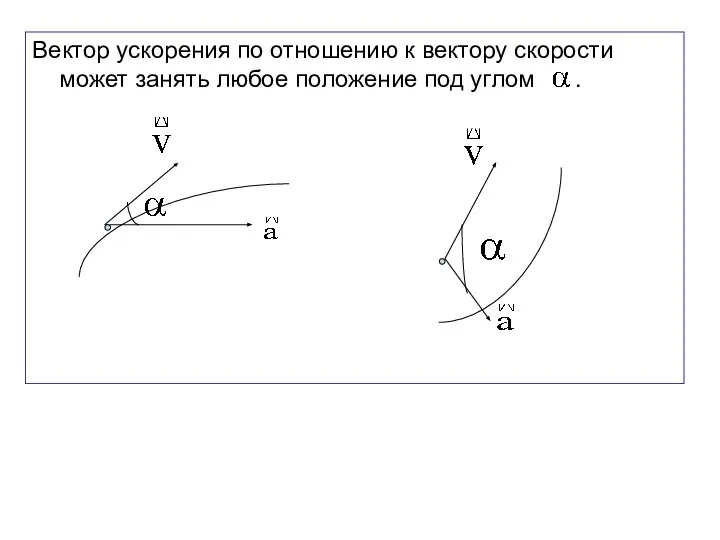
Вектор ускорения по отношению к вектору скорости может занять любое положение
Вектор ускорения по отношению к вектору скорости может занять любое положение
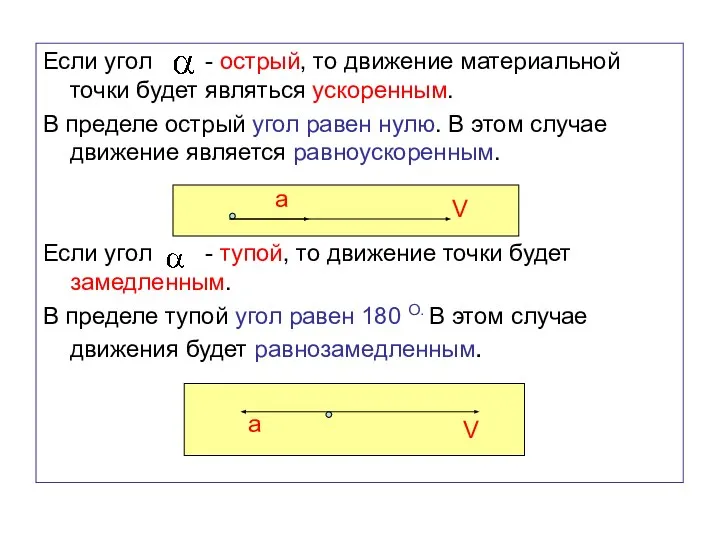
Если угол - острый, то движение материальной точки будет являться ускоренным.
Если угол - острый, то движение материальной точки будет являться ускоренным.
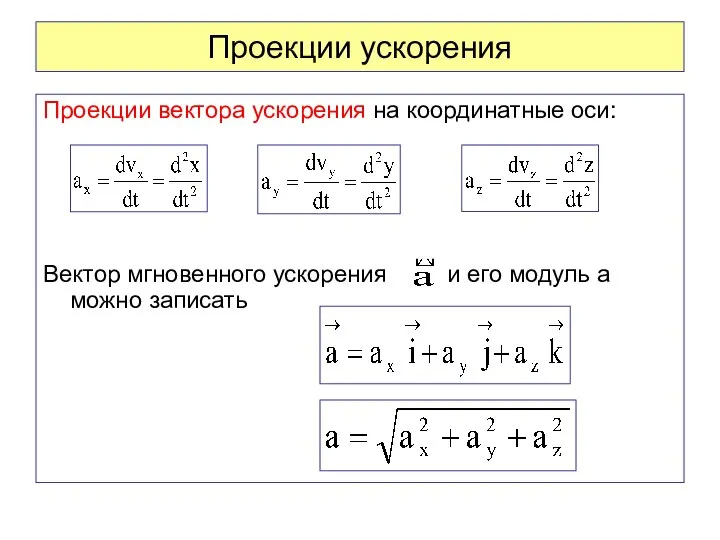
Проекции ускорения
Проекции вектора ускорения на координатные оси:
Вектор мгновенного ускорения и его
Проекции ускорения
Проекции вектора ускорения на координатные оси:
Вектор мгновенного ускорения и его
Обратная задача кинематики
В рамках кинематики решаются две основные задачи: прямая и
Обратная задача кинематики
В рамках кинематики решаются две основные задачи: прямая и
При решении обратной задачи по известной зависимости ускорения от времени ,
При решении обратной задачи по известной зависимости ускорения от времени ,
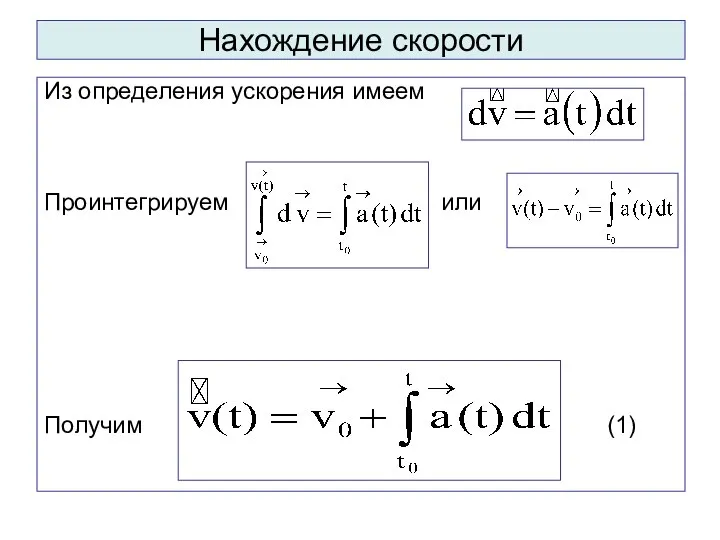
Нахождение скорости
Из определения ускорения имеем
Проинтегрируем или
Получим (1)
Нахождение скорости
Из определения ускорения имеем
Проинтегрируем или
Получим (1)
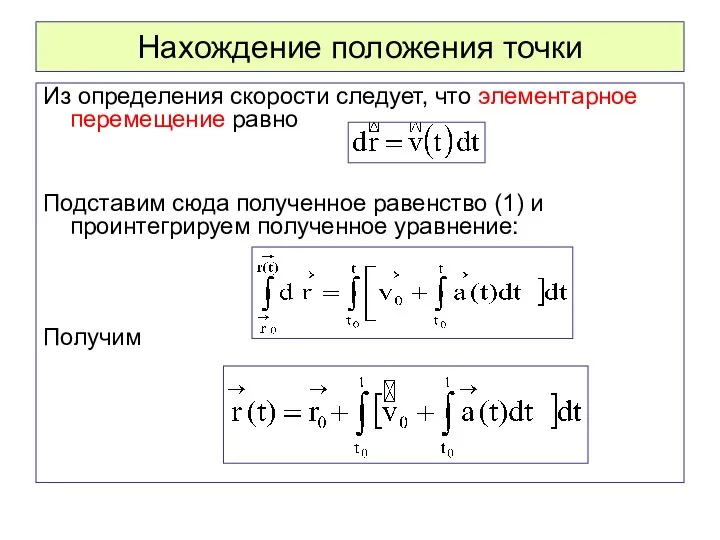
Нахождение положения точки
Из определения скорости следует, что элементарное перемещение равно
Подставим сюда
Нахождение положения точки
Из определения скорости следует, что элементарное перемещение равно
Подставим сюда
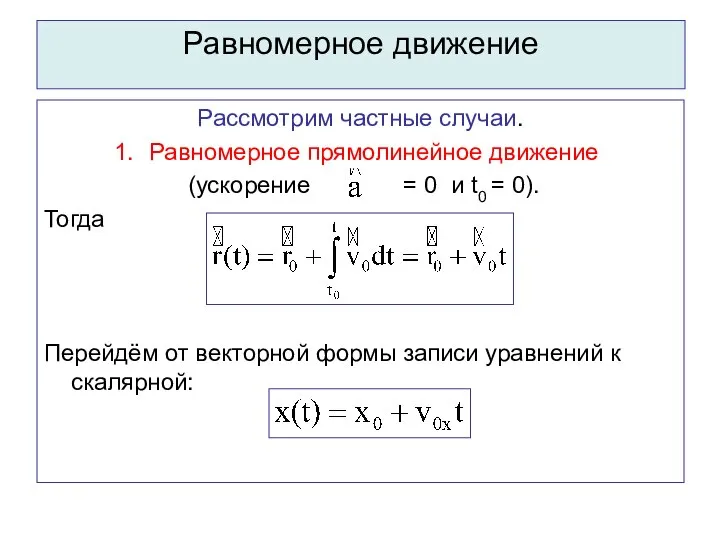
Равномерное движение
Рассмотрим частные случаи.
Равномерное прямолинейное движение
(ускорение = 0 и t0
Равномерное движение
Рассмотрим частные случаи.
Равномерное прямолинейное движение
(ускорение = 0 и t0
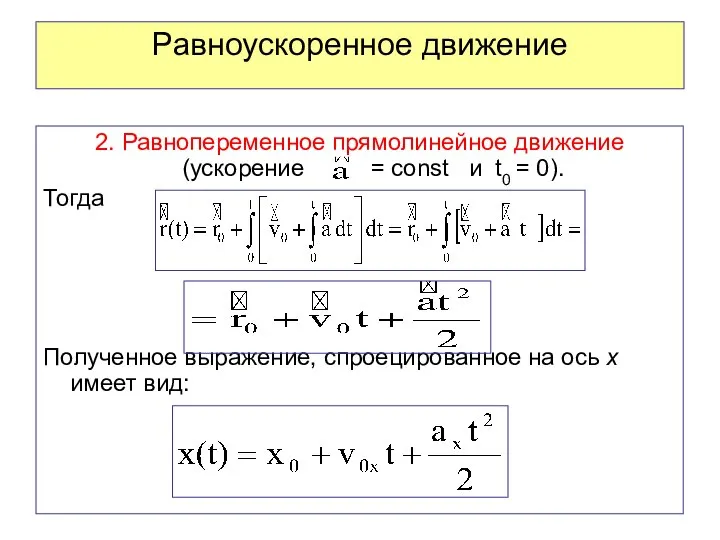
Равноускоренное движение
2. Равнопеременное прямолинейное движение (ускорение = const и t0 =
Равноускоренное движение
2. Равнопеременное прямолинейное движение (ускорение = const и t0 =
1.3. Тангенциальное и нормальное ускорения
Пусть материальная точка движется по криволинейной траектории,
1.3. Тангенциальное и нормальное ускорения
Пусть материальная точка движется по криволинейной траектории,
Вектор ускорения можно разложить на два направления: касательное к траектории и
Вектор ускорения можно разложить на два направления: касательное к траектории и
Тангенциальное ускорение характеризует изменение скорости по модулю.
Модуль тангенциального ускорения равен
Тангенциальное ускорение характеризует изменение скорости по модулю.
Модуль тангенциального ускорения равен
Нормальное ускорение характеризует изменение скорости по направлению.
Модуль нормального ускорения равен:
Нормальное ускорение
Нормальное ускорение характеризует изменение скорости по направлению.
Модуль нормального ускорения равен:
Нормальное ускорение
Полное ускорение
Полное ускорение материальной точки.
Модуль полного ускорения:
Полное ускорение
Полное ускорение материальной точки.
Модуль полного ускорения:
Движение – равноускоренное, если модуль тангенциального ускорения положителен.
При этом тангенциальное
Движение – равноускоренное, если модуль тангенциального ускорения положителен.
При этом тангенциальное
Частные случаи движений
= 0, = 0 - это равномерное прямолинейное
Частные случаи движений
= 0, = 0 - это равномерное прямолинейное
= 0, = f(t) - равномерное криволинейное движение;
5. = f(t),
= 0, = f(t) - равномерное криволинейное движение;
5. = f(t),
1.4. Кинематика вращательного движения твердого тела
Любое движение абсолютно твердого тела может
1.4. Кинематика вращательного движения твердого тела
Любое движение абсолютно твердого тела может
При поступательном движении все точки тела движутся одинаково, поэтому движение тела
При поступательном движении все точки тела движутся одинаково, поэтому движение тела
Вращательным движением твердого тела вокруг неподвижной оси называется такое движение, при
Вращательным движением твердого тела вокруг неподвижной оси называется такое движение, при
Угловое перемещение
Угловое перемещение твердого тела – вектор, численно равный углу
Угловое перемещение
Угловое перемещение твердого тела – вектор, численно равный углу
Быстроту изменения углового перемещения с течением времени характеризует угловая скорость.
Средняя угловая
Быстроту изменения углового перемещения с течением времени характеризует угловая скорость.
Средняя угловая
Мгновенная угловая скорость равна первой производной от углового перемещения по времени.
Угловая
Мгновенная угловая скорость равна первой производной от углового перемещения по времени.
Угловая
Направление векторов
Направление векторов
Быстроту изменения угловой скорости с течением времени характеризует угловое ускорение.
Среднее угловое
Быстроту изменения угловой скорости с течением времени характеризует угловое ускорение.
Среднее угловое
Мгновенное угловое ускорение равно первой производной от угловой скорости по времени
Мгновенное угловое ускорение равно первой производной от угловой скорости по времени
Направление угловых векторов.
Направление угловых векторов.
Направления угловых векторов
Направления угловых векторов
Вектор направлен вдоль оси вращения в ту же сторону, что
Вектор направлен вдоль оси вращения в ту же сторону, что
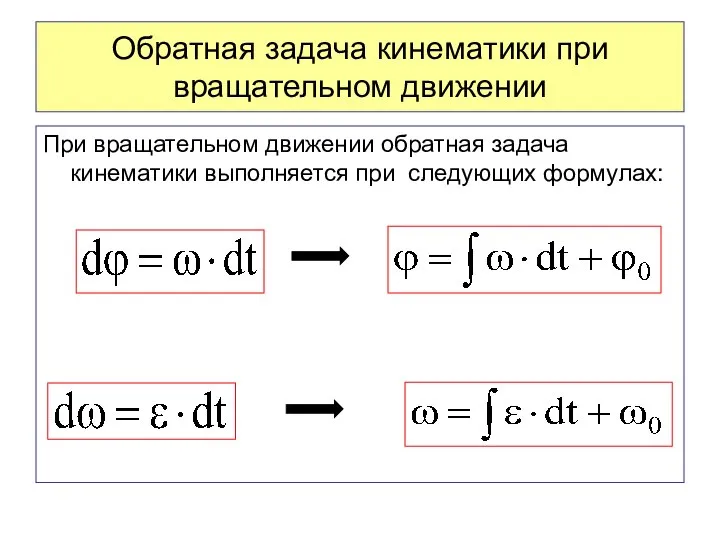
Обратная задача кинематики при вращательном движении
При вращательном движении обратная задача кинематики
Обратная задача кинематики при вращательном движении
При вращательном движении обратная задача кинематики
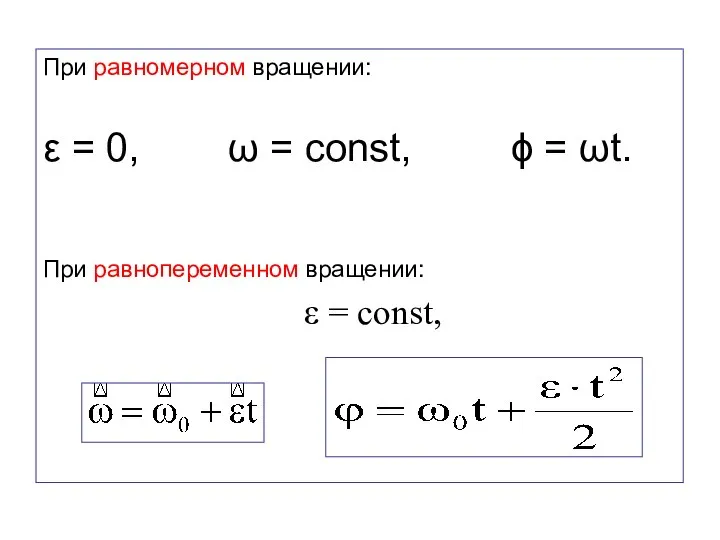
При равномерном вращении:
ε = 0, ω = const, ϕ =
При равномерном вращении:
ε = 0, ω = const, ϕ =
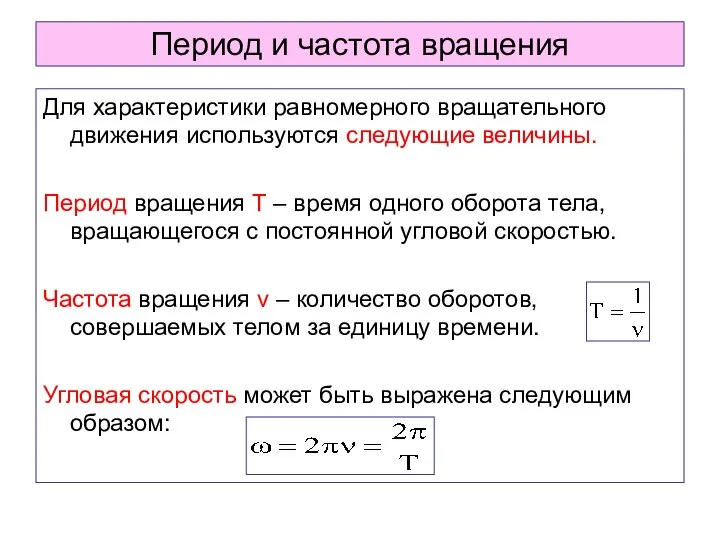
Период и частота вращения
Для характеристики равномерного вращательного движения используются следующие величины.
Период
Период и частота вращения
Для характеристики равномерного вращательного движения используются следующие величины.
Период
1.5. Взаимосвязь угловых и линейных величин
Кроме угловых величин: углового перемещения, угловой
1.5. Взаимосвязь угловых и линейных величин
Кроме угловых величин: углового перемещения, угловой
Пусть за время dt произвольная точка твердого тела А переместится на
Пусть за время dt произвольная точка твердого тела А переместится на
Направление перпендикулярно к и к . Если смотреть с конца ,
Направление перпендикулярно к и к . Если смотреть с конца ,
Направления векторов
Направления векторов
Вектор элементарного перемещения:
Разделим это соотношение на dt:
Учтём, что
Получим
Линейная скорость данной
Вектор элементарного перемещения:
Разделим это соотношение на dt:
Учтём, что
Получим
Линейная скорость данной
Если смотреть с конца вектора , то поворот от к происходит
Если смотреть с конца вектора , то поворот от к происходит
Продифференцируем выражения для v по времени:
Учтём, что – линейное ускорение,
Продифференцируем выражения для v по времени:
Учтём, что – линейное ускорение,
Первый вектор в правой части - тангенциальное ускорение.
Он характеризует изменение
Первый вектор в правой части - тангенциальное ускорение.
Он характеризует изменение
Второй вектор в правой части равенства – нормальное ускорение.
Оно направлено к
Второй вектор в правой части равенства – нормальное ускорение.
Оно направлено к
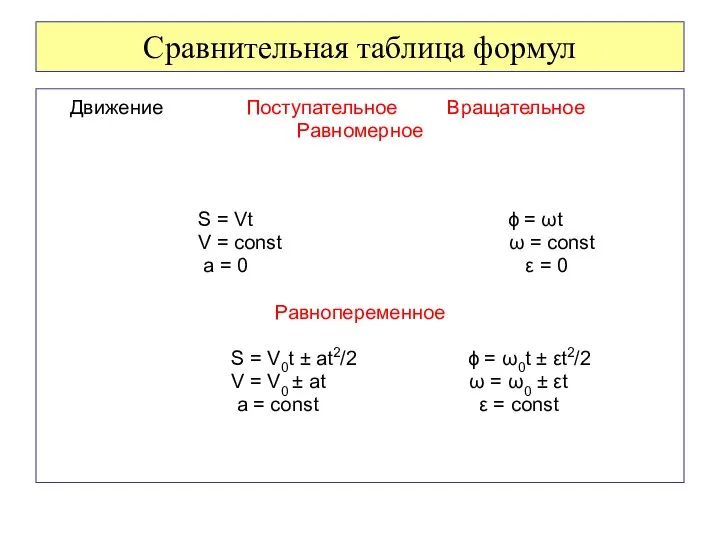
Сравнительная таблица формул
Движение Поступательное Вращательное
Равномерное
S = Vt ϕ = ωt
Сравнительная таблица формул
Движение Поступательное Вращательное
Равномерное
S = Vt ϕ = ωt
 Техника лепки из соленого теста. Тестопластика
Техника лепки из соленого теста. Тестопластика Память и творчество
Память и творчество Основы информатики и информационных технологий
Основы информатики и информационных технологий  Операторы цикла
Операторы цикла Новые направления политико-правовой мысли России начала XX в
Новые направления политико-правовой мысли России начала XX в Мастерская декоративно-прикладного творчества «Сувенир»
Мастерская декоративно-прикладного творчества «Сувенир» БИОХИМИЧЕСКИЕ СИНДРОМЫ ПАТОЛОГИИ ПЕЧЕНИ
БИОХИМИЧЕСКИЕ СИНДРОМЫ ПАТОЛОГИИ ПЕЧЕНИ Традиции и культура питания в Японии
Традиции и культура питания в Японии Сварог презентация по МХК Выполнила: Потёмкина Татьяна Михайловна, учитель МХК МКОУ «Яманская средняя общеобразовательная школ
Сварог презентация по МХК Выполнила: Потёмкина Татьяна Михайловна, учитель МХК МКОУ «Яманская средняя общеобразовательная школ Самоконтроль при занятиях физкультурой
Самоконтроль при занятиях физкультурой Составили: Учителя начальных классов МОУ СОШ № 15 Распутина А.В. Шейнкарь О.Т. Тесля М.В.
Составили: Учителя начальных классов МОУ СОШ № 15 Распутина А.В. Шейнкарь О.Т. Тесля М.В. Стратегический проект «КУХНЯ НА ЛЮБОЙ ВКУС» Итоги и актуализация проекта Чернышева Елена Викторовна Председатель Комитета п
Стратегический проект «КУХНЯ НА ЛЮБОЙ ВКУС» Итоги и актуализация проекта Чернышева Елена Викторовна Председатель Комитета п Презентация на тему "Родительское собрание «Семья – глаза в глаза»" - скачать презентации по Педагогике
Презентация на тему "Родительское собрание «Семья – глаза в глаза»" - скачать презентации по Педагогике Сочинение по картине Васнецова В.М. «Богатыри»
Сочинение по картине Васнецова В.М. «Богатыри» Представление имиджа специалистов
Представление имиджа специалистов Патогенные кокки
Патогенные кокки «Цветущая сложность в мире умерла?» Ведущий: Ломакина А. Дебаторы: Зубик В. , Трифонова Е.
«Цветущая сложность в мире умерла?» Ведущий: Ломакина А. Дебаторы: Зубик В. , Трифонова Е.  маяковский необычайное приключение
маяковский необычайное приключение  Модель соціальної політики Сполучених Штатів Америки
Модель соціальної політики Сполучених Штатів Америки Региональные меры поддержки малого, среднего бизнеса в Ленинградской области
Региональные меры поддержки малого, среднего бизнеса в Ленинградской области Ткани с опорно-механической функцией. Плотные волокнистые соединительные ткани. Хрящевые ткани
Ткани с опорно-механической функцией. Плотные волокнистые соединительные ткани. Хрящевые ткани Дайсон ТРЕБОВАНИЯ
Дайсон ТРЕБОВАНИЯ Он и Она. Тайный шифр женских сказок
Он и Она. Тайный шифр женских сказок Понятие и виды посреднических операций
Понятие и виды посреднических операций Projects: System Approach
Projects: System Approach Презентация "Дымковская игрушка" - скачать презентации по МХК
Презентация "Дымковская игрушка" - скачать презентации по МХК Карне право і карна юстиція у Стародавньому Римі. Основи римського права. Лекція 10
Карне право і карна юстиція у Стародавньому Римі. Основи римського права. Лекція 10 Формирование личности в рамках теории Чезаре Ломброзо. Подготовила студентка 2 курса группы Юб 03/1303 Селезнева М.
Формирование личности в рамках теории Чезаре Ломброзо. Подготовила студентка 2 курса группы Юб 03/1303 Селезнева М.