- Кинематика

Содержание
- 2. О – начало координат (начало отсчёта); K – название системы отсчёта Положение МТ в пространстве в
- 3. ОСНОВНЫЕ ВЕЛИЧИНЫ, ОПИСЫВАЮЩИЕ ДВИЖЕНИЕ МТ (m) – радиус-вектор в момент , – в момент , –
- 4. PS. Векторы скорости и – касательные к траектории. Очевидно: При малых очевидно, что . Средняя скорость
- 5. Мгновенная путевая скорость (при ): Среднее ускорение за промежуток времени (t1, t2): Мгновенное ускорение (в момент
- 6. Обратно: , выполняется с помощью интегрирования. Чтобы найти по заданной , необходимо знать начальное значение Аналогично:
- 7. Векторные равенства можно записать в проекциях на оси координат: , , (1.20а,б) , , (1.21а,б) ,
- 8. 1.2. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ НА ПЛОСКОСТИ. УСКОРЕНИЕ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ: ТАНГЕНЦИАЛЬНОЕ И НОРМАЛЬНОЕ УСКОРЕНИЯ. Очевидно,
- 9. Первое слагаемое – касательное или тангенциальное ускорение: при при Второе слагаемое - называется нормальной составляющей она
- 10. Можно считать: Рассматривая этот треугольник как бесконечно малый сектор, имеем Но . Отсюда
- 11. Если ввести бесконечно малый вектор поворота , направление которого указано на рисунке 1.4 – «к нам»,
- 12. Если считать малый отрезок криволинейной траектории частью окружности, то величина (1.37) называется вектором угловой скорости. Вектор
- 13. 1.3 НЕРАВНОМЕРНОЕ ДВИЖЕНИЕ ПО ОКРУЖНОСТИ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ. СВЯЗЬ МЕЖДУ ЛИНЕЙНЫМИ И УГЛОВЫМИ ВЕЛИЧИНАМИ.
- 14. Дифференцируя, находим ускорение: Второе слагаемое есть нормальное ускорение: Тогда первое, очевидно, равно : Введём новое определение:
- 15. Теперь ускорение: Двойное векторное произведение вычислим по известной математической формуле , что даёт Учитывая, что ,
- 16. Рассмотрим аналогию между ускоренными прямолинейным и криволинейным движениями (на примере МТ, движущейся по окружности) Ось OZ
- 17. Для движения по окружности: Равнопеременное движение вдоль оси описывается равенствами: Равнопеременное движение по окружности: где –
- 19. Скачать презентацию
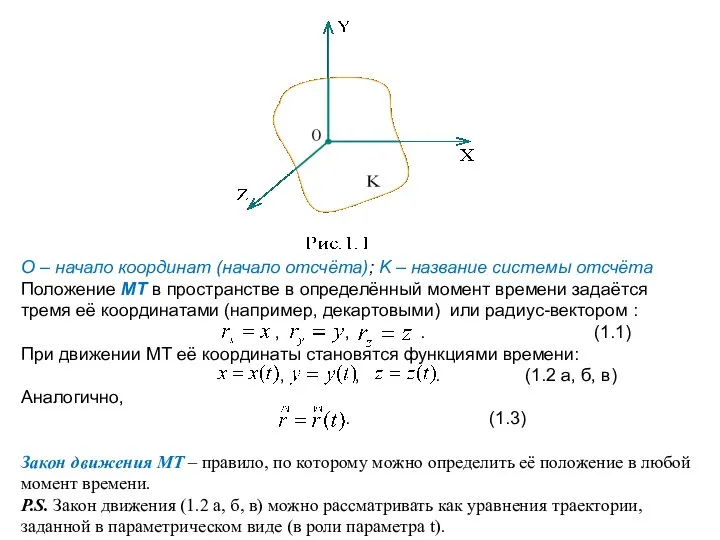
О – начало координат (начало отсчёта); K – название системы отсчёта
Положение
О – начало координат (начало отсчёта); K – название системы отсчёта
Положение
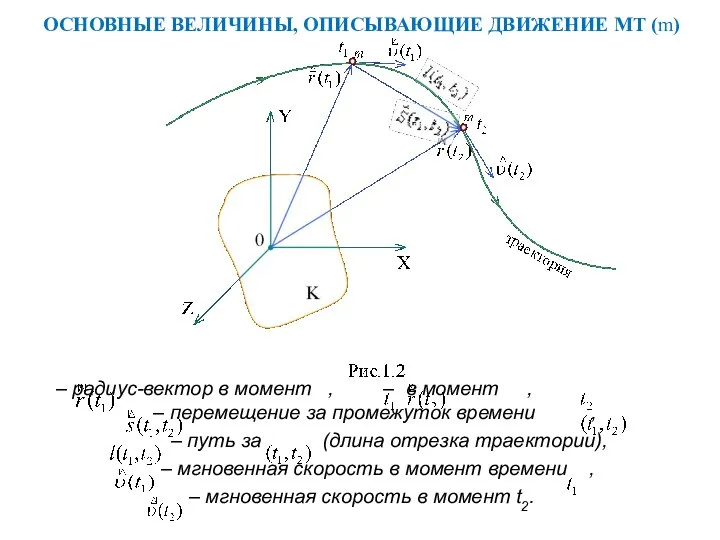
ОСНОВНЫЕ ВЕЛИЧИНЫ, ОПИСЫВАЮЩИЕ ДВИЖЕНИЕ МТ (m)
– радиус-вектор в момент , –
ОСНОВНЫЕ ВЕЛИЧИНЫ, ОПИСЫВАЮЩИЕ ДВИЖЕНИЕ МТ (m)
– радиус-вектор в момент , –
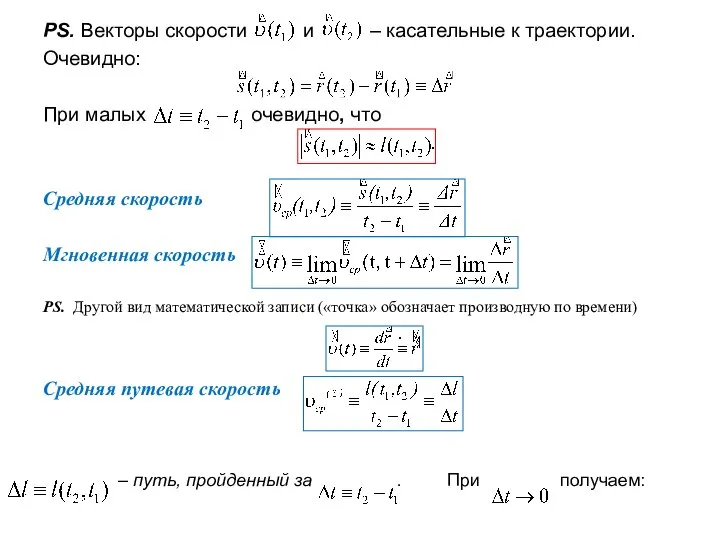
PS. Векторы скорости и – касательные к траектории.
Очевидно:
При малых очевидно, что
PS. Векторы скорости и – касательные к траектории.
Очевидно:
При малых очевидно, что
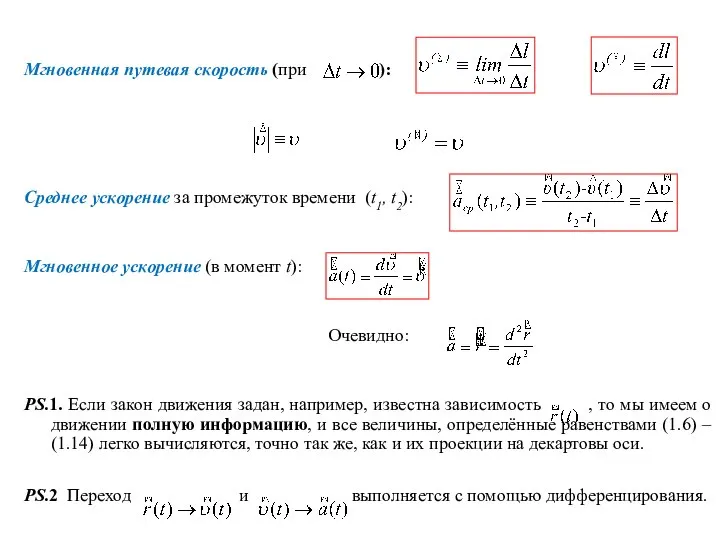
Мгновенная путевая скорость (при ):
Среднее ускорение за промежуток времени (t1, t2):
Мгновенное
Среднее ускорение за промежуток времени (t1, t2):
Мгновенное
Обратно: , выполняется с помощью интегрирования.
Чтобы найти по заданной ,
Обратно: , выполняется с помощью интегрирования.
Чтобы найти по заданной ,
Векторные равенства можно записать в проекциях на оси координат:
, , (1.20а,б)
, , (1.21а,б)
, (1.22)
(1.23)
и
Векторные равенства можно записать в проекциях на оси координат:
, , (1.20а,б)
, , (1.21а,б)
, (1.22)
(1.23)
и
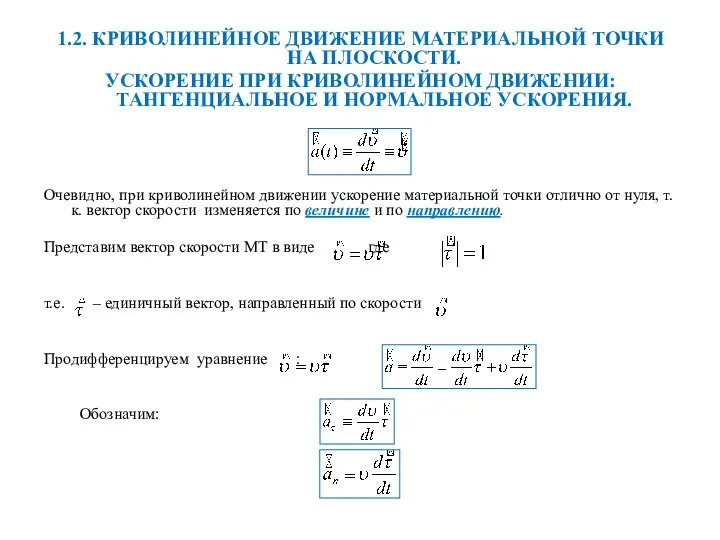
1.2. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ НА ПЛОСКОСТИ.
УСКОРЕНИЕ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ:
1.2. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ НА ПЛОСКОСТИ.
УСКОРЕНИЕ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ:
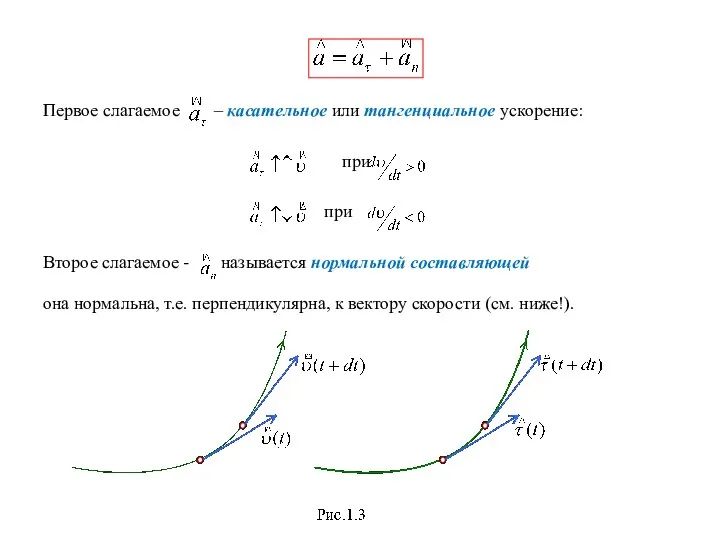
Первое слагаемое – касательное или тангенциальное ускорение:
при
при
Второе слагаемое
Первое слагаемое – касательное или тангенциальное ускорение:
при
при
Второе слагаемое
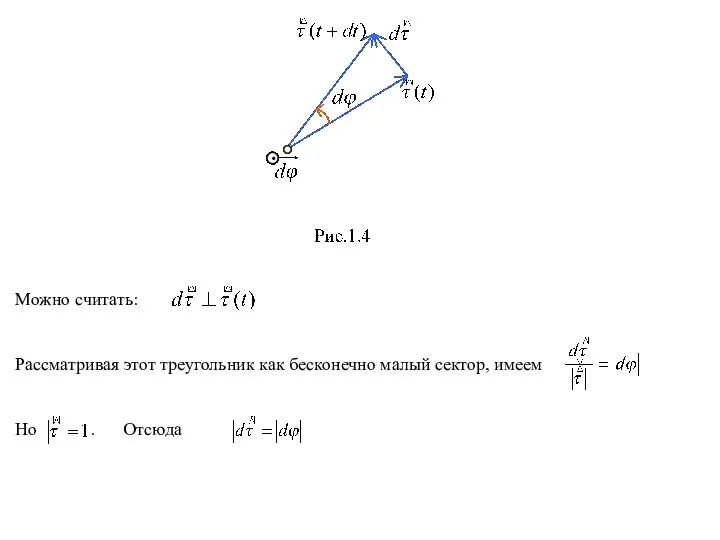
Можно считать:
Рассматривая этот треугольник как бесконечно малый сектор, имеем
Но . Отсюда
Рассматривая этот треугольник как бесконечно малый сектор, имеем
Но . Отсюда
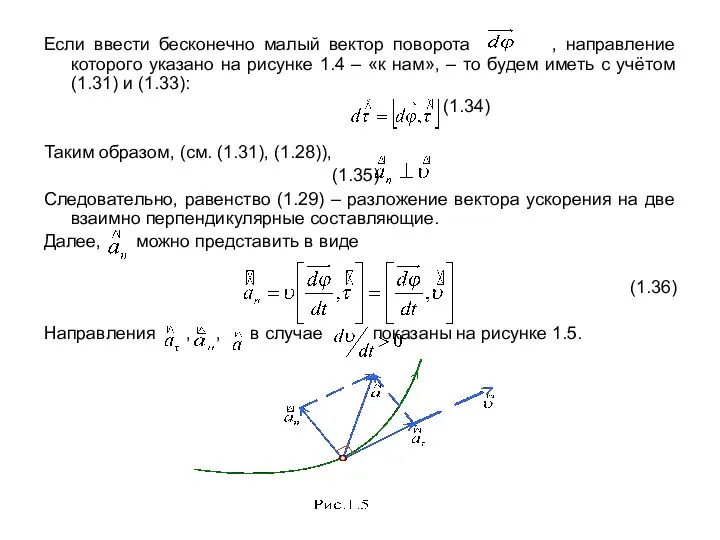
Если ввести бесконечно малый вектор поворота , направление которого указано на
Если ввести бесконечно малый вектор поворота , направление которого указано на
Если считать малый отрезок криволинейной траектории частью окружности, то величина
Если считать малый отрезок криволинейной траектории частью окружности, то величина
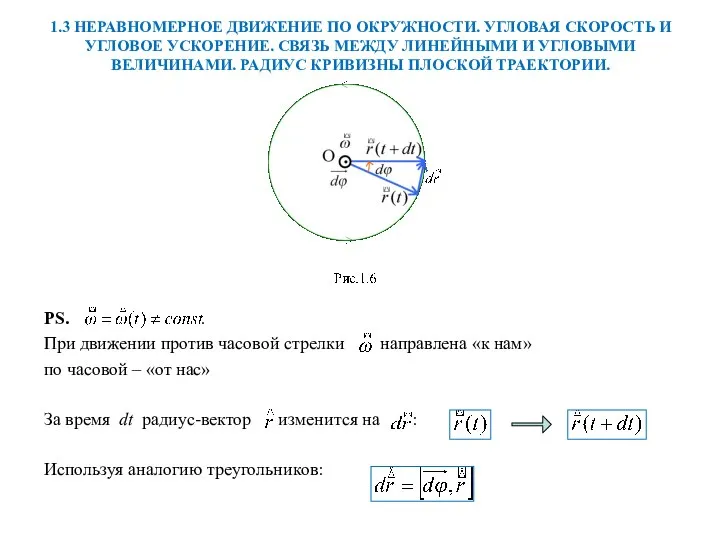
1.3 НЕРАВНОМЕРНОЕ ДВИЖЕНИЕ ПО ОКРУЖНОСТИ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ. СВЯЗЬ
1.3 НЕРАВНОМЕРНОЕ ДВИЖЕНИЕ ПО ОКРУЖНОСТИ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ. СВЯЗЬ
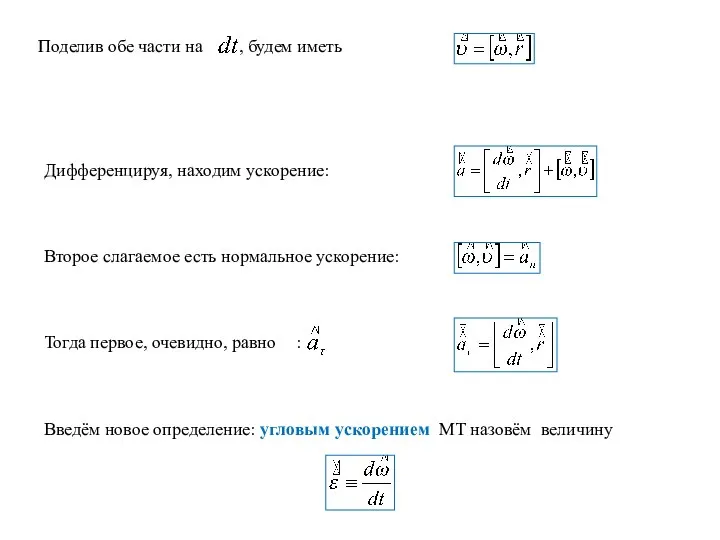
Дифференцируя, находим ускорение:
Второе слагаемое есть нормальное ускорение:
Тогда первое, очевидно, равно :
Введём
Дифференцируя, находим ускорение:
Второе слагаемое есть нормальное ускорение:
Тогда первое, очевидно, равно :
Введём
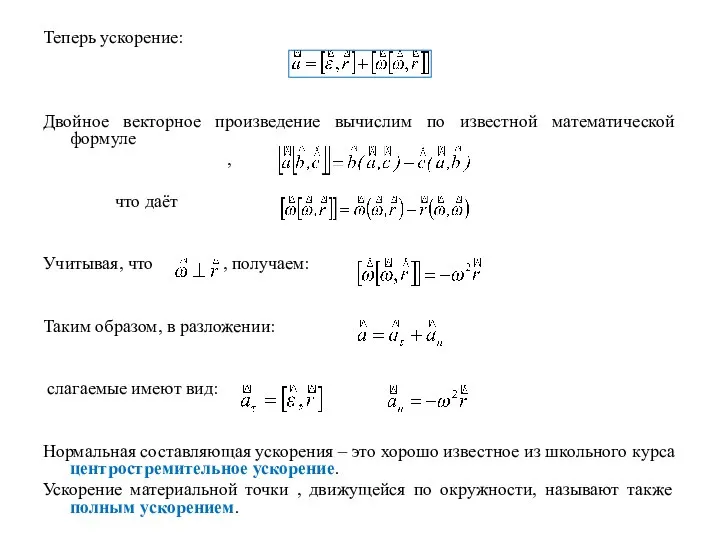
Теперь ускорение:
Двойное векторное произведение вычислим по известной математической формуле
,
что даёт
Учитывая,
Теперь ускорение:
Двойное векторное произведение вычислим по известной математической формуле
,
что даёт
Учитывая,
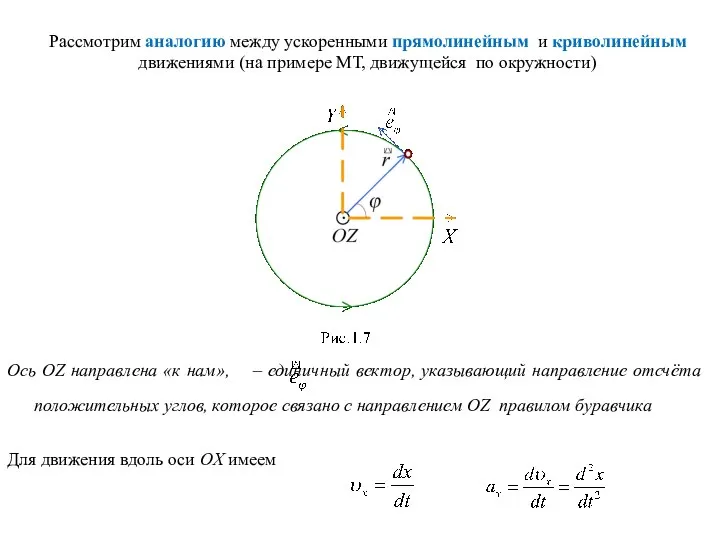
Рассмотрим аналогию между ускоренными прямолинейным и криволинейным движениями (на примере МТ,
Рассмотрим аналогию между ускоренными прямолинейным и криволинейным движениями (на примере МТ,
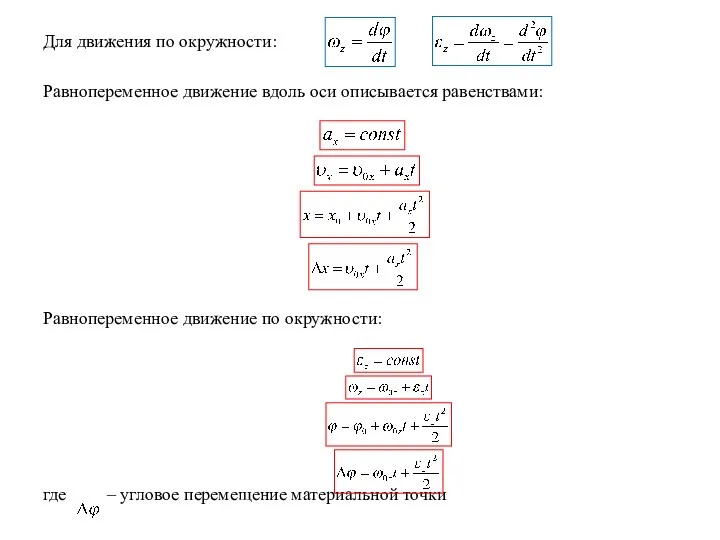
Для движения по окружности:
Равнопеременное движение вдоль оси описывается равенствами:
Равнопеременное движение
Для движения по окружности:
Равнопеременное движение вдоль оси описывается равенствами:
Равнопеременное движение
 Что мы не можем делать - презентация для начальной школы_
Что мы не можем делать - презентация для начальной школы_ Презентация Кант Трансцендентальная диалектика Этика
Презентация Кант Трансцендентальная диалектика Этика Достопримечательности стран мира
Достопримечательности стран мира Педагогическая психология
Педагогическая психология  Клееный брус в малоэтажном строительстве
Клееный брус в малоэтажном строительстве Спорт - презентация для начальной школы_
Спорт - презентация для начальной школы_ Мусульманское искусство. КААБА.
Мусульманское искусство. КААБА. Принципы обучения
Принципы обучения  Джон Констебл (1776 -1837)
Джон Констебл (1776 -1837) Программирование на языке Python
Программирование на языке Python Выпускная квалификационная работа Проектирование устройства «Ультразвуковая линейка на Arduino»
Выпускная квалификационная работа Проектирование устройства «Ультразвуковая линейка на Arduino» Культурные растения
Культурные растения И. С. Тургенев (1818-1883)
И. С. Тургенев (1818-1883) Системы объектно-ориентированного программирования
Системы объектно-ориентированного программирования DOM-манипуляции
DOM-манипуляции Функция Руководства. Лидерство
Функция Руководства. Лидерство Водопользование.ppt
Водопользование.ppt Музей “Писанка”
Музей “Писанка” Дания - презентация для начальной школы
Дания - презентация для начальной школы Jemaah Islamiayh (JI)
Jemaah Islamiayh (JI) ФАКТОРИНГ: АКТУАЛЬНЫЕ ВОПРОСЫ НАЛОГООБЛОЖЕНИЯ Алексей Николаевич Кузнецов к.э.н., АМСТ, FССА Партнер отдела налогообложения и п
ФАКТОРИНГ: АКТУАЛЬНЫЕ ВОПРОСЫ НАЛОГООБЛОЖЕНИЯ Алексей Николаевич Кузнецов к.э.н., АМСТ, FССА Партнер отдела налогообложения и п Источники электрической энергии. Системы электроснабжения воздушных судов. Тема 6
Источники электрической энергии. Системы электроснабжения воздушных судов. Тема 6 Разработка культурно-исторического наследия Каслинского района
Разработка культурно-исторического наследия Каслинского района Глаголы совершенного и несовершенного вида. Видовая пара. Одновидовые и двувидовые глаголы
Глаголы совершенного и несовершенного вида. Видовая пара. Одновидовые и двувидовые глаголы  Tower bridge
Tower bridge Азбука пожарной безопасности (Часть 1) АВТОР: МБДОУ детский сад №44 «ЗОЛУШКА» РЕКОМЕНДУЕТСЯ ДЛЯ ПЕДАГОГОВ И РОДИТЕЛЕЙ
Азбука пожарной безопасности (Часть 1) АВТОР: МБДОУ детский сад №44 «ЗОЛУШКА» РЕКОМЕНДУЕТСЯ ДЛЯ ПЕДАГОГОВ И РОДИТЕЛЕЙ  Бабочки 2 класс - презентация для начальной школы_
Бабочки 2 класс - презентация для начальной школы_ ASEL ASAN BIOCH
ASEL ASAN BIOCH