- Линейная засечка

Содержание
- 2. Отсюда Вычислив значения А и В, определим углы φ и ψ φ = А+ В, ψ
- 3. Координаты точки Р: Для контроля координат точки Р можно вычислить второй раз, используя формулы
- 4. Среднюю квадратическую ошибку в положении пункта Р, определенного обратной засечкой, можно вычислить по формуле где mβ
- 5. Рассмотренная обратная засечка по трем исходным пунктам называется однократной. В таком виде она, как правило, не
- 6. Задача решается дважды при различном сочетании исходных пунктов. Например, первый раз используются пункты А, В, С
- 7. Отсюда допустимое расхождение в значениях вычисленных координат можно установить по формуле где X/ , Y/ –
- 8. 4. Линейная засечка. Задача линейной засечки заключает-ся в определении координат третьего пункта по координатам двух исходных
- 9. Даны координаты пунктов А, B, C. Измерены линии S1, S2, S3. Требуется определить координаты точки P
- 10. Рассмотрим однократную засечку с использованием пунктов А и В. 1. Решением обратной геодезической задачи определим дирекционный
- 11. 2. Определим угол β1, используя теорему косинусов: 3. Определим дирекционный угол линии АР
- 12. 4. Определим координаты точки Р: Для контроля решения задачи вычисляется длина линии ВР и сравнивается с
- 13. Расхождение не должно превышать 3-х единиц последнего знака в измеренном значении линии S2. Для полного контроля
- 14. Допускается |СР–S3| где ms – СКО измерения расстояний S3. Однако в целях повышения точности окончательных значений
- 15. Допустимое расхождение в координатах определяют по формуле В свою очередь
- 16. где М1 и М2 – СКО положения пункта Р, определенного линейной засечкой в первом и втором
- 17. Величину угла засечки (для первого решения) можно найти из выражения За окончательное значение координат пункта Р
- 18. Тема: «ЭЛЕКТРОННЫЕ ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЙ»
- 19. 1. Принцип и методы измерения расстояний. 2. Сущность фазового метода. 3. Импульсно-фазовый метод. 4.Способы разрешения неоднозначности.
- 20. 6. Общие сведения о светодальномерах. 7. Светодальномер СТ5. 8. Поверки светодальномера СТ5 и измерение расстояний. 9.
- 21. Литература Помелов С.И. Электронные дальномеры: Лекция. – Горки: БГСХА, 2004. – 28 с. Помелов С.И. Электронные
- 22. 1.Принципы и методы измерения расстояний. Физический принцип действия электронных (электромагнитных) дальномеров основан на определении времени прохождения
- 23. Идея определения расстояний электромаг-нитными дальномерами довольно проста. Для измерения расстояния между точками А и В в
- 24. Электромагнитные волны, посланные из точки А, отражаются в точке В и возвращаются обратно. Если определить время
- 25. В настоящее время скорость распространения электромагнитных волн в вакууме известна с высокой точностью и принята равной:
- 26. Задача сводится к определению времени τ. В зависимости от способов ее решения различают следующие методы измерения
- 27. Импульсный метод характеризуется сравнительно большой абсолютной погрешностью. Поэтому его целесообразно использовать для измерения больших расстояний, когда
- 28. Частотный метод основан на использовании частотно-модулированных колебаний и сводится к измерению приращения частоты за время распространения
- 29. Интерференционный метод основан на непосредственном наблюдении результата интерференции двух (или более) когерентных световых волн, прошедших различные
- 30. Фазовый метод. Этот метод измерения расстояний наиболее распространен в геодезии. Применяется для измерения расстояний от нескольких
- 31. 2. Фазовый метод В большинстве устройств для измерения расстояний используются модулированные электромагнитные колебания. Модуляция – это
- 32. Амплитудная модуляция показана на рис. До прохождения модулятора электромаг-нитные волны имеют частоту собственных колебаний, которая называется
- 33. После прохождения модулятора длина несущей волны сохраняется, но амплитуда колебаний будет изменяться с заданной частотой. Частота
- 34. Пусть передатчик излучает электромаг-нитные колебания с частотой f , которой соответствует длина волны Эти колебания направляются
- 35. Пусть для какого-то момента времени t колебания, пришедшие с дистанции, имеют фазу где 2πf– круговая частота.
- 36. Разность фаз составит Отсюда где N – целое число волн, уложившихся в расстоянии 2D; ΔN –
- 38. Скачать презентацию
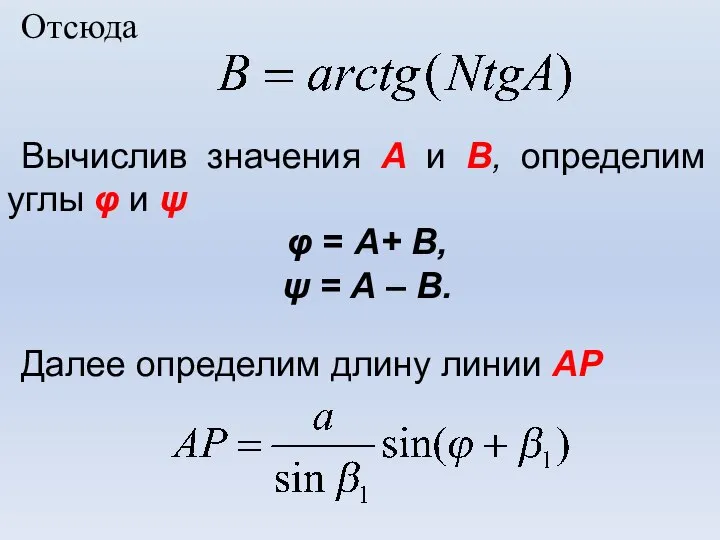
Отсюда
Вычислив значения А и В, определим углы φ и ψ
Отсюда
Вычислив значения А и В, определим углы φ и ψ
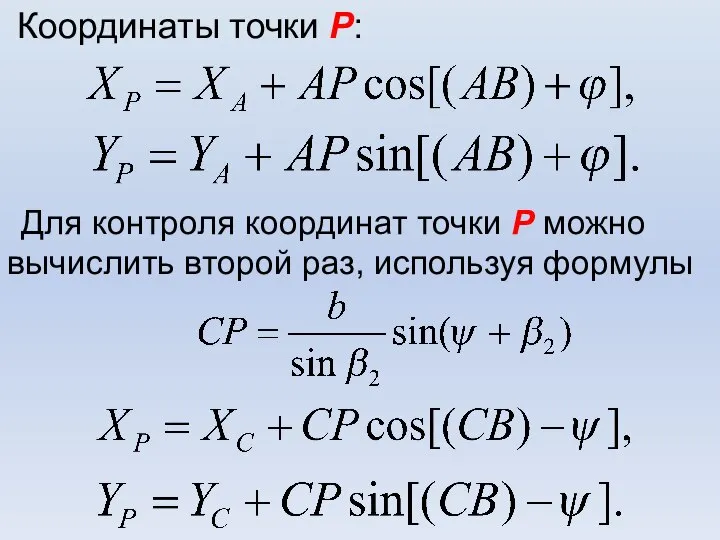
Координаты точки Р:
Для контроля координат точки Р можно вычислить
Координаты точки Р:
Для контроля координат точки Р можно вычислить
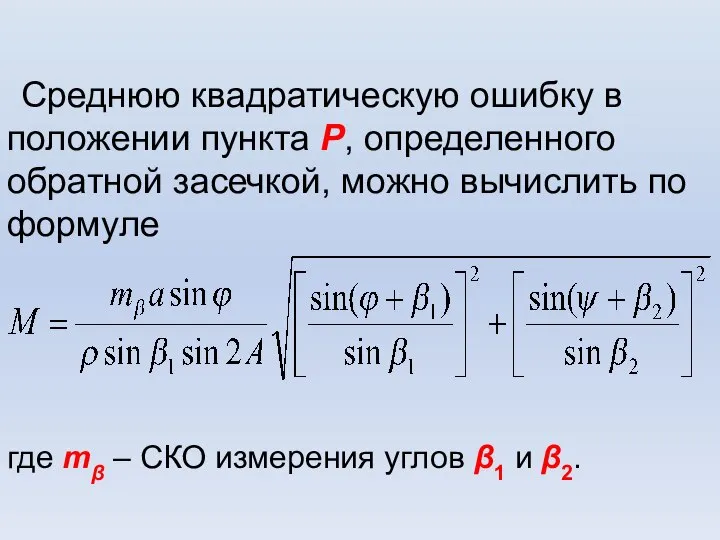
Среднюю квадратическую ошибку в положении пункта Р, определенного обратной засечкой, можно
Среднюю квадратическую ошибку в положении пункта Р, определенного обратной засечкой, можно
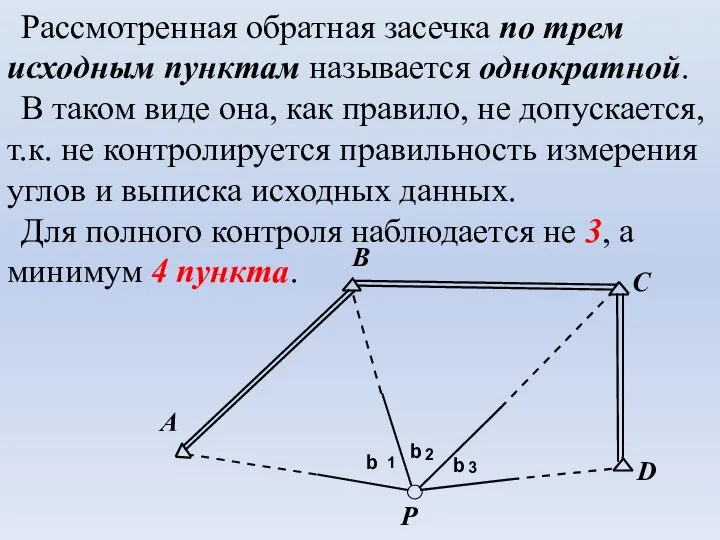
Рассмотренная обратная засечка по трем исходным пунктам называется однократной.
В таком
Рассмотренная обратная засечка по трем исходным пунктам называется однократной.
В таком
Задача решается дважды при различном сочетании исходных пунктов. Например, первый раз
Задача решается дважды при различном сочетании исходных пунктов. Например, первый раз
Отсюда допустимое расхождение в значениях вычисленных координат можно установить по формуле
Отсюда допустимое расхождение в значениях вычисленных координат можно установить по формуле
4. Линейная засечка.
Задача линейной засечки заключает-ся в определении координат третьего
4. Линейная засечка.
Задача линейной засечки заключает-ся в определении координат третьего
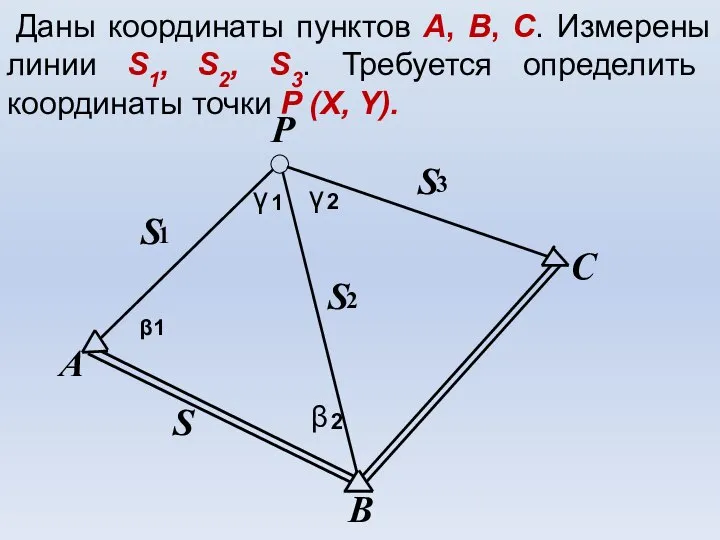
Даны координаты пунктов А, B, C. Измерены линии S1, S2, S3.
Даны координаты пунктов А, B, C. Измерены линии S1, S2, S3.
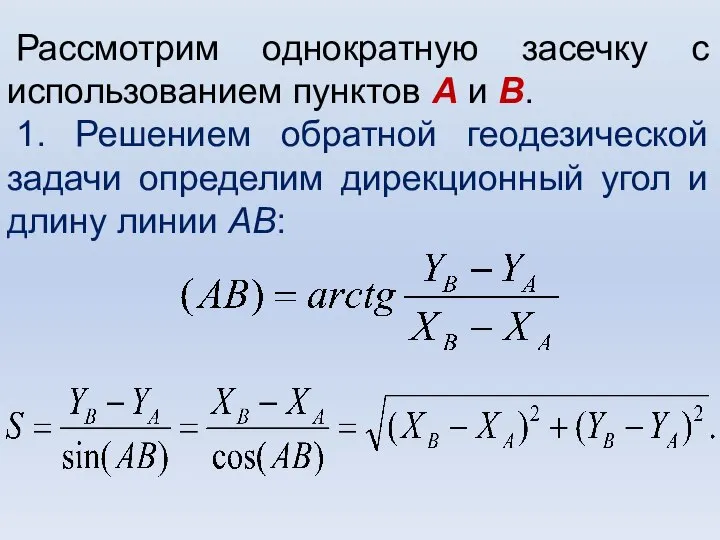
Рассмотрим однократную засечку с использованием пунктов А и В.
1. Решением обратной
Рассмотрим однократную засечку с использованием пунктов А и В.
1. Решением обратной

2. Определим угол β1, используя теорему косинусов:
3. Определим дирекционный угол
2. Определим угол β1, используя теорему косинусов:
3. Определим дирекционный угол
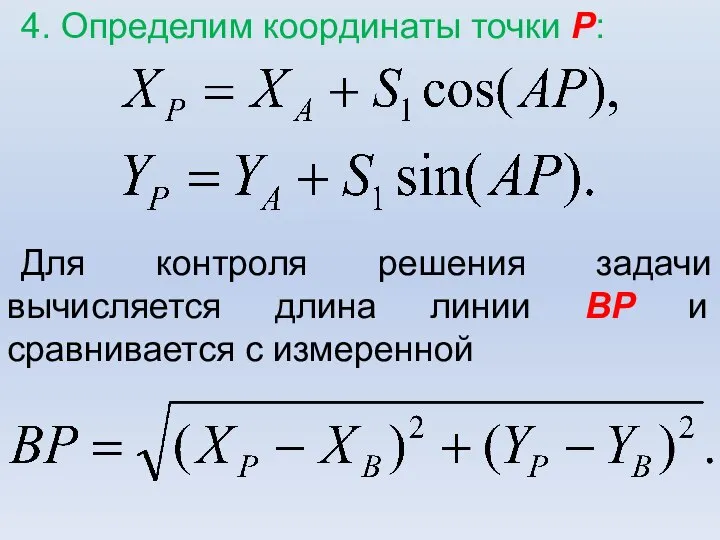
4. Определим координаты точки Р:
Для контроля решения задачи вычисляется длина
4. Определим координаты точки Р:
Для контроля решения задачи вычисляется длина
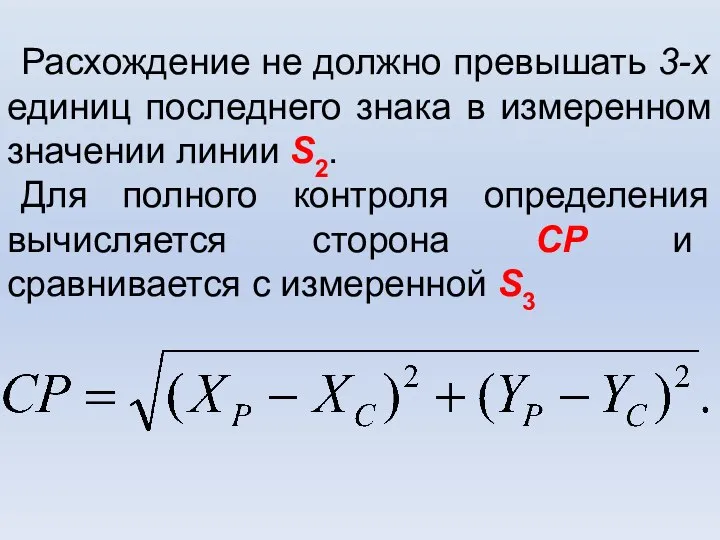
Расхождение не должно превышать 3-х единиц последнего знака в измеренном значении
Расхождение не должно превышать 3-х единиц последнего знака в измеренном значении
Допускается
|СР–S3| <6ms
где ms – СКО измерения расстояний S3.
Однако в целях
Допускается
|СР–S3| <6ms
где ms – СКО измерения расстояний S3.
Однако в целях
Допустимое расхождение в координатах определяют по формуле
В свою очередь
Допустимое расхождение в координатах определяют по формуле
В свою очередь
где М1 и М2 – СКО положения пункта Р, определенного линейной
где М1 и М2 – СКО положения пункта Р, определенного линейной

Величину угла засечки (для первого решения) можно найти из выражения
Величину угла засечки (для первого решения) можно найти из выражения
Тема: «ЭЛЕКТРОННЫЕ ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЙ»
Тема: «ЭЛЕКТРОННЫЕ ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЙ»
1. Принцип и методы измерения расстояний.
2. Сущность фазового метода.
3.
1. Принцип и методы измерения расстояний.
2. Сущность фазового метода.
3.
6. Общие сведения о светодальномерах.
7. Светодальномер СТ5.
8. Поверки светодальномера СТ5 и
6. Общие сведения о светодальномерах.
7. Светодальномер СТ5.
8. Поверки светодальномера СТ5 и
Литература
Помелов С.И. Электронные дальномеры: Лекция. – Горки: БГСХА, 2004. –
Литература
Помелов С.И. Электронные дальномеры: Лекция. – Горки: БГСХА, 2004. –
1.Принципы и методы измерения расстояний.
Физический принцип действия электронных (электромагнитных) дальномеров
1.Принципы и методы измерения расстояний.
Физический принцип действия электронных (электромагнитных) дальномеров
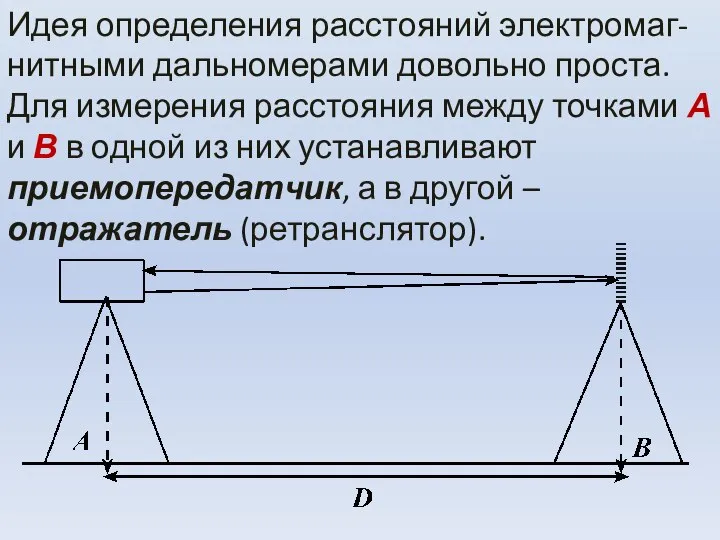
Идея определения расстояний электромаг-нитными дальномерами довольно проста. Для измерения расстояния между
Идея определения расстояний электромаг-нитными дальномерами довольно проста. Для измерения расстояния между

Электромагнитные волны, посланные из точки А, отражаются в точке В и
Электромагнитные волны, посланные из точки А, отражаются в точке В и
В настоящее время скорость распространения электромагнитных волн в вакууме известна
В настоящее время скорость распространения электромагнитных волн в вакууме известна
Задача сводится к определению времени τ. В зависимости от способов
Задача сводится к определению времени τ. В зависимости от способов
Импульсный метод характеризуется сравнительно большой абсолютной погрешностью. Поэтому его целесообразно использовать
Импульсный метод характеризуется сравнительно большой абсолютной погрешностью. Поэтому его целесообразно использовать
Частотный метод основан на использовании частотно-модулированных колебаний и сводится к измерению
Частотный метод основан на использовании частотно-модулированных колебаний и сводится к измерению
Интерференционный метод основан на непосредственном наблюдении результата интерференции двух (или более)
Интерференционный метод основан на непосредственном наблюдении результата интерференции двух (или более)
Фазовый метод. Этот метод измерения расстояний наиболее распространен в геодезии. Применяется
Фазовый метод. Этот метод измерения расстояний наиболее распространен в геодезии. Применяется
2. Фазовый метод
В большинстве устройств для измерения расстояний используются модулированные электромагнитные
2. Фазовый метод
В большинстве устройств для измерения расстояний используются модулированные электромагнитные
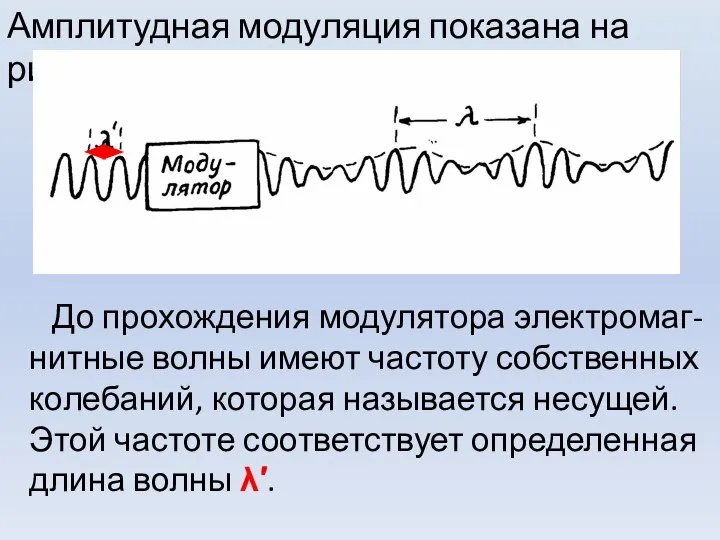
Амплитудная модуляция показана на рис.
До прохождения модулятора электромаг-нитные волны
Амплитудная модуляция показана на рис.
До прохождения модулятора электромаг-нитные волны
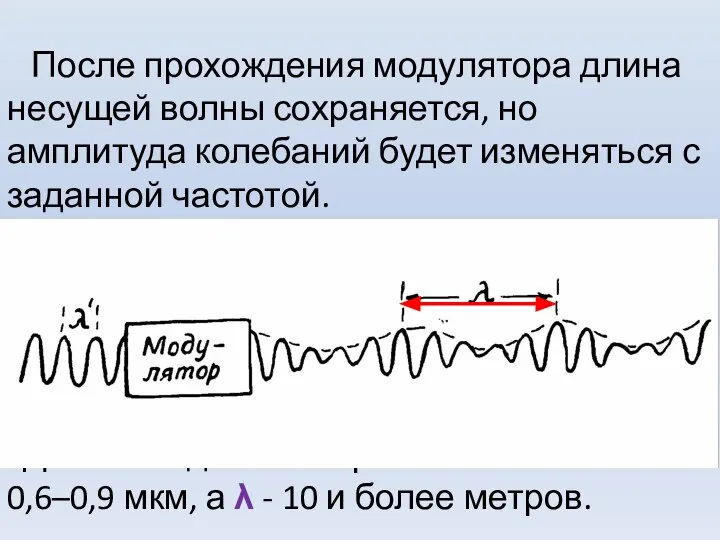
После прохождения модулятора длина несущей волны сохраняется, но амплитуда колебаний
После прохождения модулятора длина несущей волны сохраняется, но амплитуда колебаний
Пусть передатчик излучает электромаг-нитные колебания с частотой f , которой соответствует
Пусть передатчик излучает электромаг-нитные колебания с частотой f , которой соответствует
Пусть для какого-то момента времени t колебания, пришедшие с дистанции, имеют
Пусть для какого-то момента времени t колебания, пришедшие с дистанции, имеют
Разность фаз составит
Отсюда
где N – целое число волн, уложившихся в расстоянии
Разность фаз составит
Отсюда
где N – целое число волн, уложившихся в расстоянии
 АЛГОРИТМЫ ГЕНЕРАЦИИ и ТЕСТИРОВАНИЯ СЛУЧАЙНЫХ и ПСЕВДОСЛУЧАЙНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ
АЛГОРИТМЫ ГЕНЕРАЦИИ и ТЕСТИРОВАНИЯ СЛУЧАЙНЫХ и ПСЕВДОСЛУЧАЙНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ Функции. Прототип функции. Локальные, глобальные переменные. Формальные параметры (язык C)
Функции. Прототип функции. Локальные, глобальные переменные. Формальные параметры (язык C) Хруцкий Иван Трофимович Презентация к уроку
Хруцкий Иван Трофимович Презентация к уроку Русская народная потешка
Русская народная потешка Характеристика карьерных дорог
Характеристика карьерных дорог Малые народности России Ненцы.
Малые народности России Ненцы. СЦ «Алмазный лед»
СЦ «Алмазный лед» Презентация "Какими средствами воздействует искусство?" - скачать презентации по МХК
Презентация "Какими средствами воздействует искусство?" - скачать презентации по МХК Памятка первокурснику гуманитарного института КГУ
Памятка первокурснику гуманитарного института КГУ Авторская модель эффектного и эффективного урока Мацкевич Дмитрий Геннадьевич учитель математики высшей категории УО «Брасла
Авторская модель эффектного и эффективного урока Мацкевич Дмитрий Геннадьевич учитель математики высшей категории УО «Брасла Иллюстрированные правила игры "Twilight imperium 3rd edition" на русском языке
Иллюстрированные правила игры "Twilight imperium 3rd edition" на русском языке Права человека в истории политико-правовой мысли Права человека в Античном мире Права человека в Средние века
Права человека в истории политико-правовой мысли Права человека в Античном мире Права человека в Средние века  Подготовила учитель начальных классов Банникова Наталья Анатольевна. Муниципальное бюджетное общеобразовательное учрежд
Подготовила учитель начальных классов Банникова Наталья Анатольевна. Муниципальное бюджетное общеобразовательное учрежд Назначение PowerShell
Назначение PowerShell Осуществление мониторинга как условие, обеспечивающее качественную реализацию ФГОС МОУ «СОШ № 20 с УИОП» Матушкина Е.Н. 2011г.
Осуществление мониторинга как условие, обеспечивающее качественную реализацию ФГОС МОУ «СОШ № 20 с УИОП» Матушкина Е.Н. 2011г. Game of Greek and Latin Roots teacher
Game of Greek and Latin Roots teacher Работа по психологии Стресс. - презентация
Работа по психологии Стресс. - презентация МК Eng 7-11
МК Eng 7-11 Государственный земельный надзор и муниципальный земельный контроль: проблемы реализации
Государственный земельный надзор и муниципальный земельный контроль: проблемы реализации Пантеизм и новая космология
Пантеизм и новая космология Венская система
Венская система Структурные преобразования
Структурные преобразования Урок – путешествие. Немецкий язык 2 класс
Урок – путешествие. Немецкий язык 2 класс Глобальная система электронной коммерции Fohow+
Глобальная система электронной коммерции Fohow+ Менталитет и национальный характер. Формирование менталитета народа России
Менталитет и национальный характер. Формирование менталитета народа России Территориальное планирование
Территориальное планирование Управление становлением образовательных практик_Москва
Управление становлением образовательных практик_Москва Платформа Arduino
Платформа Arduino