- Метрические задачи. (Лекция 3)

Содержание
- 2. Метод преобразования чертежа П1 П2 А l1 А1 l2 Ах Х ZА YА А2 0 АА1=А2Ах
- 3. Способ преобразования чертежа П4⊥ П2
- 4. 1.2.Метрические задачи. Метод преобразования чертежа А1А4⊥ Х1; Х1 П2 П1 А4 В4 П1 П4 В2 В1
- 5. 1.2.Метрические задачи. Метод преобразования чертежа Х1//А1В1 А1А4⊥ Х1; В1В4⊥ Х1 α
- 6. Метод прямоугольного треугольника ΔY|А-В| ΔY|А-В| В0 Н.в. Задано: Две проекции отрезка АВ ; Построить: Действительный вид
- 7. Определение углов наклона отрезка прямой линии Х2 А5 В5 β X3 C5 D5 γ
- 8. Преобразование чертежа h1 Kx1 П4 h (K4)=h4 K c c4 Σ (h ∩ c)= K; Σ1(
- 9. Определение угла наклона плоской фигуры к основным плоскостям проекций α А2 В2 С2 D2 С1 D1
- 10. Определение действительного вида плоской фигуры С4 А4 В4
- 11. Определение расстояний между объектами проецирования Пример 1. А2 А1 h2 h1 В1 В2 ΔZА-В Н.в. В0
- 12. Определение расстояние между объектами проецирования Пример 3. А2 А1 h2 h1 В1 В2 ΔZА-В Н.в. А0
- 14. Скачать презентацию
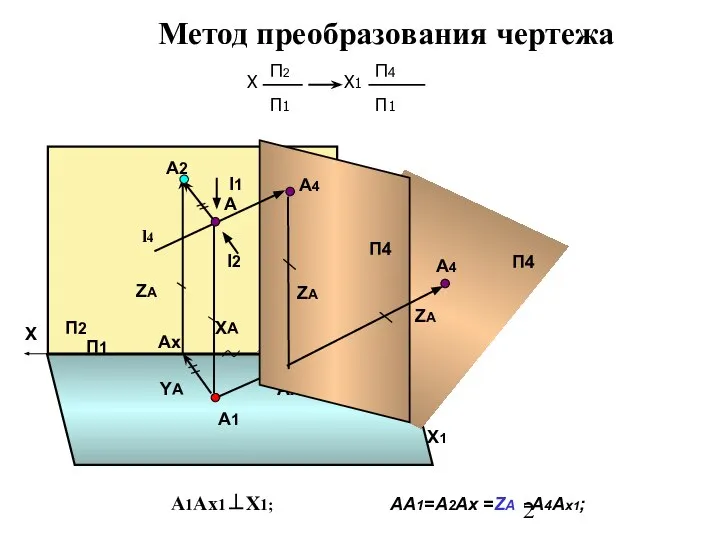
Метод преобразования чертежа
П1
П2
А
l1
А1
l2
Ах
Х
ZА
YА
А2
0
АА1=А2Ах =ZА =А4Ах1;
ХА
l4
Х1
А1Ах1⊥Х1;
Ах1
ZА
А4
П4
ZА
А4
П4
Метод преобразования чертежа
П1
П2
А
l1
А1
l2
Ах
Х
ZА
YА
А2
0
АА1=А2Ах =ZА =А4Ах1;
ХА
l4
Х1
А1Ах1⊥Х1;
Ах1
ZА
А4
П4
ZА
А4
П4

Способ преобразования чертежа
П4⊥ П2
Способ преобразования чертежа
П4⊥ П2
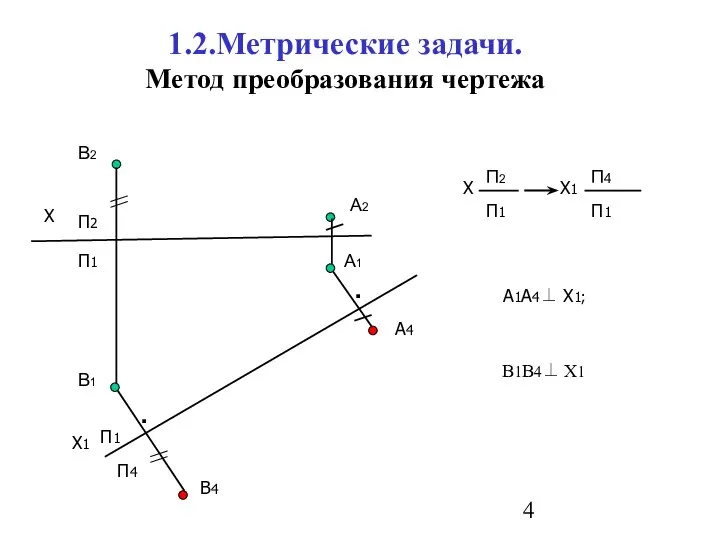
1.2.Метрические задачи.
Метод преобразования чертежа
А1А4⊥ Х1;
Х1
П2
П1
А4
В4
П1
П4
В2
В1
А2
А1
Х
▪
В1В4⊥ Х1
▪
1.2.Метрические задачи.
Метод преобразования чертежа
А1А4⊥ Х1;
Х1
П2
П1
А4
В4
П1
П4
В2
В1
А2
А1
Х
▪
В1В4⊥ Х1
▪
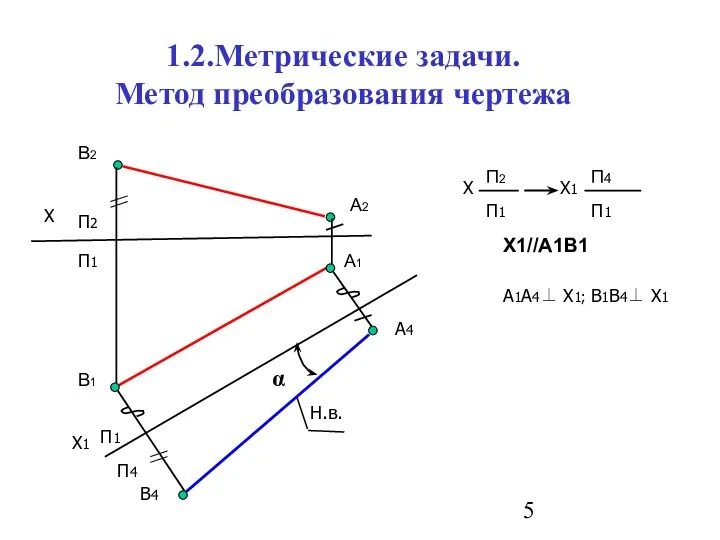
1.2.Метрические задачи.
Метод преобразования чертежа
Х1//А1В1
А1А4⊥ Х1; В1В4⊥ Х1
α
1.2.Метрические задачи.
Метод преобразования чертежа
Х1//А1В1
А1А4⊥ Х1; В1В4⊥ Х1
α
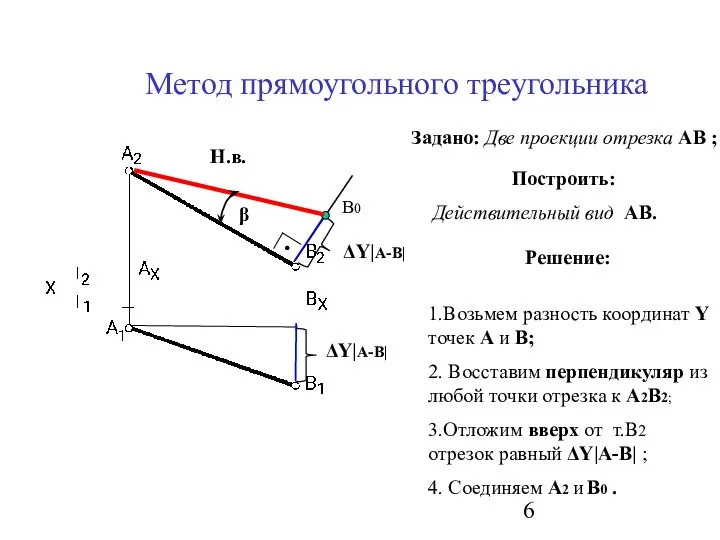
Метод прямоугольного треугольника
ΔY|А-В|
ΔY|А-В|
В0
Н.в.
Задано: Две проекции отрезка АВ ;
Построить:
Действительный вид АВ.
Решение:
1.Возьмем разность
Метод прямоугольного треугольника
ΔY|А-В|
ΔY|А-В|
В0
Н.в.
Задано: Две проекции отрезка АВ ;
Построить:
Действительный вид АВ.
Решение:
1.Возьмем разность
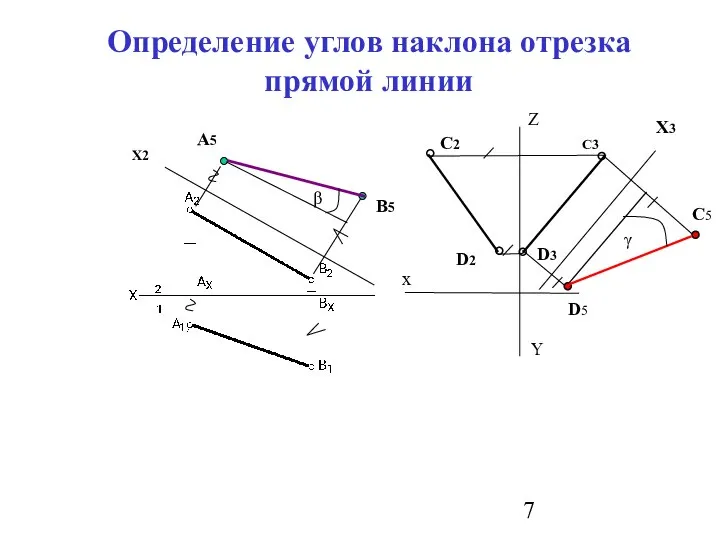
Определение углов наклона отрезка прямой линии
Х2
А5
В5
β
X3
C5
D5
γ
Определение углов наклона отрезка прямой линии
Х2
А5
В5
β
X3
C5
D5
γ
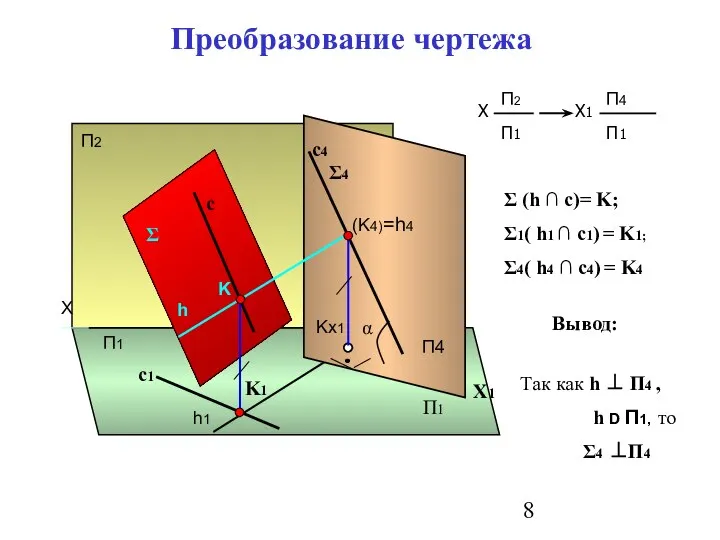
Преобразование чертежа
h1
Kx1
П4
h
(K4)=h4
K
c
c4
Σ (h ∩ c)= K;
Σ1( h1 ∩ c1) =
Преобразование чертежа
h1
Kx1
П4
h
(K4)=h4
K
c
c4
Σ (h ∩ c)= K;
Σ1( h1 ∩ c1) =
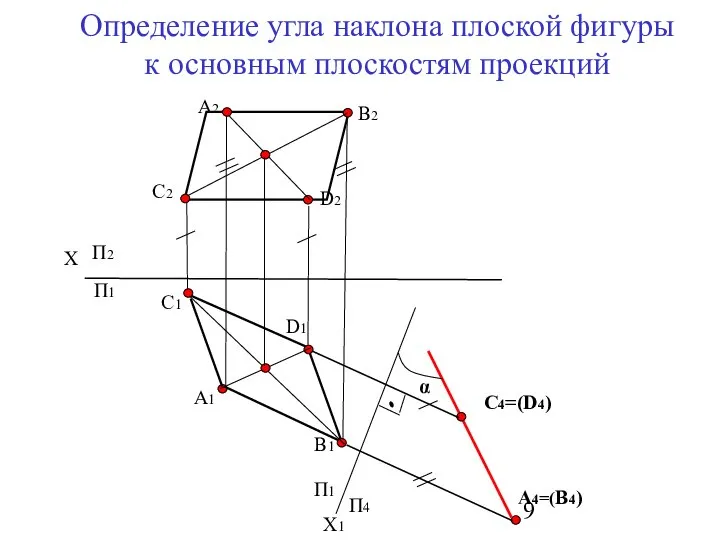
Определение угла наклона плоской фигуры к основным плоскостям проекций
α
А2
В2
С2
D2
С1
D1
В1
А1
С4=(D4)
А4=(В4)
Определение угла наклона плоской фигуры к основным плоскостям проекций
α
А2
В2
С2
D2
С1
D1
В1
А1
С4=(D4)
А4=(В4)
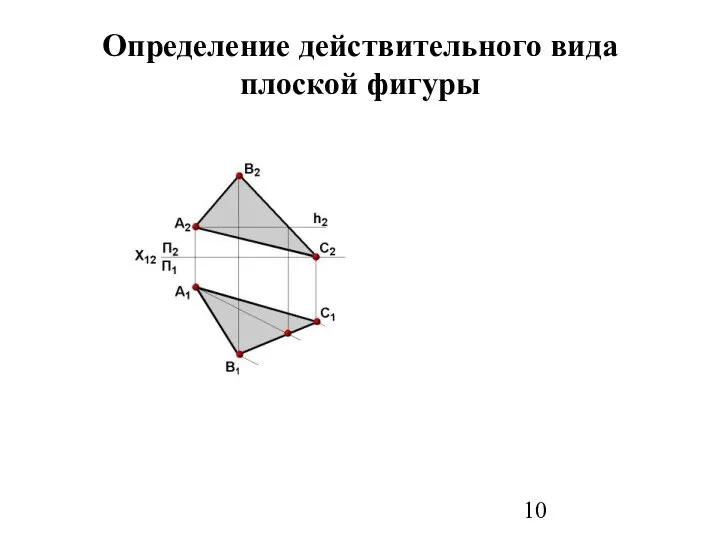
Определение действительного вида плоской фигуры
С4
А4
В4
Определение действительного вида плоской фигуры
С4
А4
В4
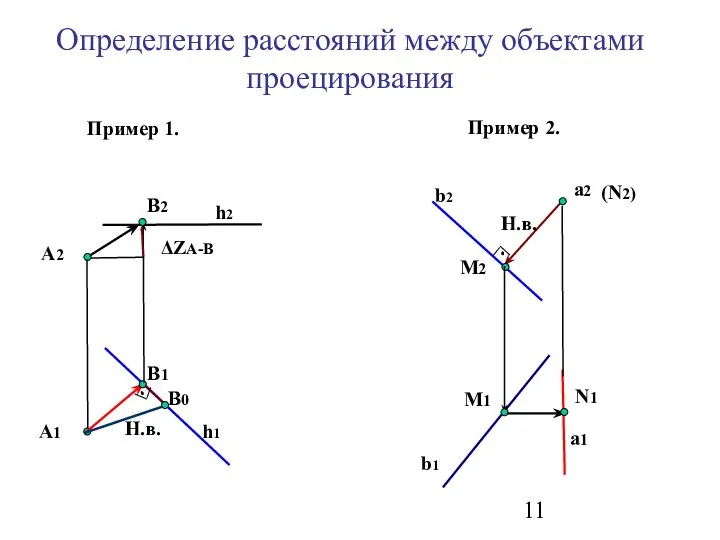
Определение расстояний между объектами проецирования
Пример 1.
А2
А1
h2
h1
В1
В2
ΔZА-В
Н.в.
В0
Пример 2.
b1
b2
а2
а1
M2
M1
N1
(N2)
Н.в.
Определение расстояний между объектами проецирования
Пример 1.
А2
А1
h2
h1
В1
В2
ΔZА-В
Н.в.
В0
Пример 2.
b1
b2
а2
а1
M2
M1
N1
(N2)
Н.в.

Определение расстояние между объектами проецирования
Пример 3.
А2
А1
h2
h1
В1
В2
ΔZА-В
Н.в.
А0
f2
f1
Пример 4.
h2
h1
А2
А1
m2
=m1
С2
С1
f2
f1
D1
D2
С0
Н.в.
Определение расстояние между объектами проецирования
Пример 3.
А2
А1
h2
h1
В1
В2
ΔZА-В
Н.в.
А0
f2
f1
Пример 4.
h2
h1
А2
А1
m2
=m1
С2
С1
f2
f1
D1
D2
С0
Н.в.
 Уверенность в каждом дне
Уверенность в каждом дне Организация системы работы с одаренными детьми Харитонова Светлана Антонасовна учитель изобразительного искусства, технологи
Организация системы работы с одаренными детьми Харитонова Светлана Антонасовна учитель изобразительного искусства, технологи Железы желудка
Железы желудка ОНТП 01-91. Общесоюзные нормы технологического проектирования предприятий автомобильного транспорта
ОНТП 01-91. Общесоюзные нормы технологического проектирования предприятий автомобильного транспорта Экономические затраты elena22_73@mail.ru
Экономические затраты elena22_73@mail.ru Trabalenguas (скороговорки)
Trabalenguas (скороговорки) Разработка рекомендаций по использованию солнечных батарей в условиях Республики Марий Эл
Разработка рекомендаций по использованию солнечных батарей в условиях Республики Марий Эл Le cinématographe des frères Lumière
Le cinématographe des frères Lumière Влияние оконных откосов на теплозащитные свойства стен
Влияние оконных откосов на теплозащитные свойства стен Уголовное право
Уголовное право Свободные механические колебания
Свободные механические колебания  Я приглашаю вас в мир шахмат
Я приглашаю вас в мир шахмат Осень. Основные модные тенденции
Осень. Основные модные тенденции Объектно-ориентированное программирование. Лабораторная работа
Объектно-ориентированное программирование. Лабораторная работа Объектно-ориентированное программирование. Создаем программу-тест
Объектно-ориентированное программирование. Создаем программу-тест MAPK
MAPK Промышленные здания
Промышленные здания КНДР. Социально-политическая система
КНДР. Социально-политическая система Аттестационная работа. Образовательная программа внеурочной деятельности спортивно-оздоровительного кружка «Туризм»
Аттестационная работа. Образовательная программа внеурочной деятельности спортивно-оздоровительного кружка «Туризм» Финишные методы обработки
Финишные методы обработки Электрические машины переменного тока
Электрические машины переменного тока Блиц-опрос на тему «Маркетинговые исследования»
Блиц-опрос на тему «Маркетинговые исследования» Выключатели типов ВАБ-42 и ВАТ-42
Выключатели типов ВАБ-42 и ВАТ-42 Социология как наука об обществе
Социология как наука об обществе ТЕСТ ПО ЭКОНОМИЧЕСКОЙ ТЕОРИИ НА ТЕМУ ПРЕДЛОЖЕНИЕ,СПРОС И РАВНОВЕСИЕ ПОДГОТОВИЛИ: БАЛУХТИНА РЕГИНА БИРЮКОВА НАДЕЖДА ТС-1405
ТЕСТ ПО ЭКОНОМИЧЕСКОЙ ТЕОРИИ НА ТЕМУ ПРЕДЛОЖЕНИЕ,СПРОС И РАВНОВЕСИЕ ПОДГОТОВИЛИ: БАЛУХТИНА РЕГИНА БИРЮКОВА НАДЕЖДА ТС-1405 Противомикробные, противовирусные и противопаразитарные лекарственные средства
Противомикробные, противовирусные и противопаразитарные лекарственные средства Информатизация
Информатизация Протекание жидкого гелия Фазовые переходы моттовский изолятор – сверхтекучая жидкость. Низкоразмерная сверхтекучесть
Протекание жидкого гелия Фазовые переходы моттовский изолятор – сверхтекучая жидкость. Низкоразмерная сверхтекучесть