- МИРЭА_лекция_01.ppt

Содержание
- 2. Искусственный интеллект?
- 3. БУДУЩЕЕ
- 4. МАСШТАБ ВРЕМЕНИ 1912 2012
- 5. МАСШТАБ ВРЕМЕНИ 1912 2012
- 6. МАСШТАБ ВРЕМЕНИ Рост раковой опухоли Рост популяции Рост организма Рост численности населения Рост потребления энергии
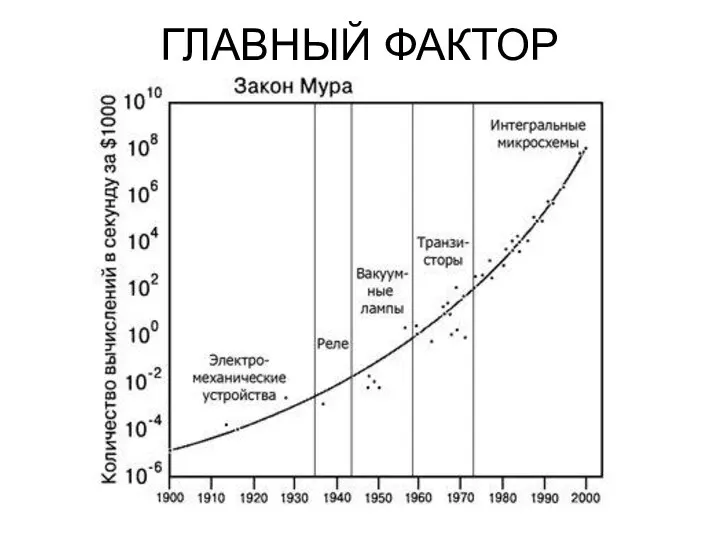
- 7. ГЛАВНЫЙ ФАКТОР
- 8. ГЛАВНЫЙ ФАКТОР Рост вычислительной мощности компьютеров в соответствии с законом Мура
- 9. Очень близкое будущее (до 2040) такое
- 10. Очень близкое будущее (до 2040) или такое
- 11. 14-16 марта 2012 Техническое зрение в системах управления - 2012 Unmanned Aircraft Systems (UAS) Roadmap, 2005-2030
- 12. Richard Rumpf Rumpf Associates International, Inc. 14-16 марта 2012 Техническое зрение в системах управления - 2012
- 13. Системы улучшенного и синтезированного видения
- 14. Цифровые изображения Изображение как двумерный массив данных Видимое поле представляет собой лишь некоторую функцию распределения яркости
- 15. Цифровое изображение Лабораторная система обработки и анализа изображений Pisoft Image Framework
- 16. Физическая природа изображений Изображения различных диапазонов длин волн Диапазоны длин волн электромагнитного излучения
- 17. Физическая природа изображений Изображения различных диапазонов длин волн Характеристики волн видимой части спектра и прилегающих к
- 18. Изображения различных диапазонов длин волн Области применения
- 19. Изображения различной физической природы Области применения Многоспектральные изображения: ТВ и два ИК диапазона (3-5 и 8-14
- 20. Типы изображений Цветные изображения – специальный тип данных, запись формата TcolorRef = {Red, Green, Blue}. Разрешение
- 21. Компьютерное зрение как область компьютерной обработки информации Компьютерное и машинное зрение Требования к системам и алгоритмам
- 22. Компьютерное зрение Проблемы, связанные с анализом изображений Разнообразие яркостно-геометрических свойств изображения (яркости, цвета, текстуры, формы, размеры…).
- 23. Уровни и методы компьютерного зрения Модульная парадигма (Д. Марр. «Зрение») Этапы обработки данных: предобработка изображений; сегментация;
- 24. Термины и сопряженные технические дисциплины Компьютерное зрение (computer vision) изучает теорию и базовые алгоритмы анализа изображений
- 25. Термины и сопряженные технические дисциплины Зрение роботов (robot vision) включает задачи машинного зрения, решаемые в условиях
- 26. Термины и сопряженные технические дисциплины Обработка изображений (image processing) в узком смысле – обработка нижнего уровня,
- 27. Термины и сопряженные технические дисциплины Цифровая фотограмметрия (digital photogrammetry) в узком смысле – изучает метрические соотношения
- 28. Требования к алгоритмам машинного зрения робастность; точность; вычислительная реализуемость. Факторы, осложняющие решение задач: помехи и «шум»
- 29. Требования к алгоритмам машинного зрения Факторы, осложняющие решение задач: эффекты резкой смены освещения, блики, тени, особенно
- 30. Компьютерное зрение как обобщение школьной геометрии
- 31. Как найти окружность?
- 32. Как найти окружность? Проблема: Помимо полезных точек есть ложные
- 33. Метод общих геометрических мест Задача 1: Построение треугольника по 3 заданным отрезкам.
- 34. Метод общих геометрических мест Задача 1: Построение треугольника по 3 заданным отрезкам. гмт1
- 35. Метод общих геометрических мест Задача 1: Построение треугольника по 3 заданным отрезкам. гмт1 гмт2
- 36. Метод общих геометрических мест Задача 1: Построение треугольника по 3 заданным отрезкам. гмт1 гмт2 гмт1 ∩
- 37. Метод общих геометрических мест Задача 2: Построение окружности по 3 заданным точкам.
- 38. Метод общих геометрических мест Задача 2: Построение окружности по 3 заданным точкам. гмт1
- 39. Метод общих геометрических мест Задача 2: Построение окружности по 3 заданным точкам. гмт1 гмт2
- 40. Метод общих геометрических мест Задача 2: Построение окружности по 3 заданным точкам. гмт1 гмт2 гмт1 ∩
- 41. Метод общих геометрических мест Задача 2: Построение окружности по 3 заданным точкам. гмт1 гмт2 гмт1 ∩
- 42. Метод общих геометрических мест Задача 2: Построение окружности по 3 заданным точкам. гмт1 гмт2 гмт1 ∩
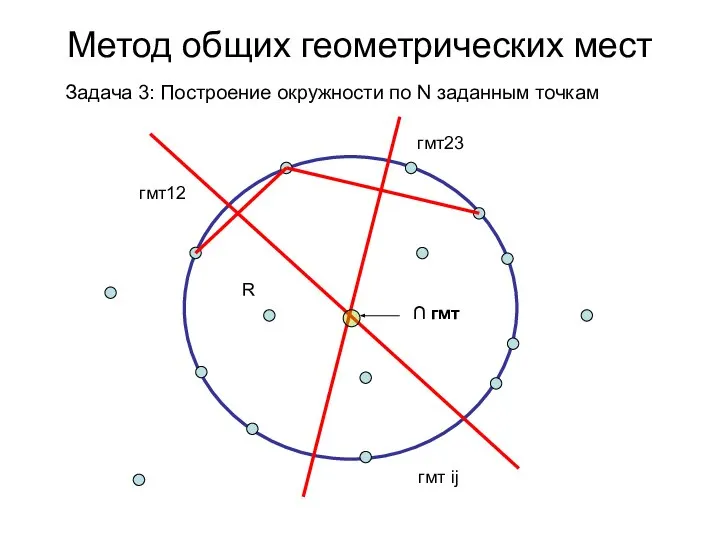
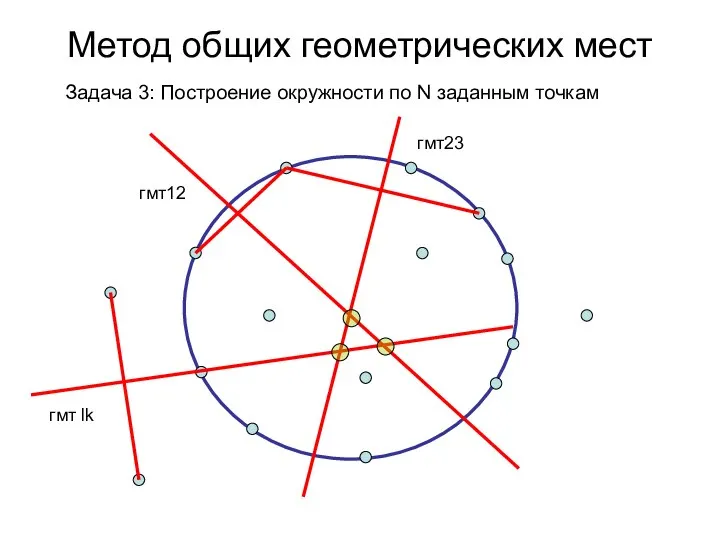
- 43. Метод общих геометрических мест Задача 3: Построение окружности по N заданным точкам
- 44. Метод общих геометрических мест Задача 3: Построение окружности по N заданным точкам
- 45. Метод общих геометрических мест Задача 3: Построение окружности по N заданным точкам гмт12 R
- 46. Метод общих геометрических мест Задача 3: Построение окружности по N заданным точкам гмт12 гмт23 ∩ гмт
- 47. Метод общих геометрических мест Задача 3: Построение окружности по N заданным точкам гмт12 гмт23 гмт lk
- 48. Метод общих геометрических мест Задача 3: Построение окружности по N заданным точкам гмт12 гмт23 гмт ij
- 49. Метод общих геометрических мест Задача 3: Построение окружности по N заданным точкам гмт12 гмт23 MAX ∩
- 50. Компьютерное зрение как школьная геометрия++ Отличия КЗ от классической геометрии: 1. Увеличение числа точек на порядки.
- 52. Скачать презентацию

Искусственный интеллект?
Искусственный интеллект?

БУДУЩЕЕ
БУДУЩЕЕ

МАСШТАБ ВРЕМЕНИ
1912 2012
МАСШТАБ ВРЕМЕНИ
1912 2012

МАСШТАБ ВРЕМЕНИ
1912 2012
МАСШТАБ ВРЕМЕНИ
1912 2012

МАСШТАБ ВРЕМЕНИ
Рост раковой опухоли
Рост популяции
Рост организма
Рост численности
МАСШТАБ ВРЕМЕНИ
Рост раковой опухоли
Рост популяции
Рост организма
Рост численности
ГЛАВНЫЙ ФАКТОР
ГЛАВНЫЙ ФАКТОР

ГЛАВНЫЙ ФАКТОР
Рост вычислительной мощности компьютеров в соответствии с законом Мура
ГЛАВНЫЙ ФАКТОР
Рост вычислительной мощности компьютеров в соответствии с законом Мура

Очень близкое будущее (до 2040)
такое
Очень близкое будущее (до 2040)
такое

Очень близкое будущее (до 2040)
или такое
Очень близкое будущее (до 2040)
или такое

14-16 марта 2012 Техническое зрение в системах управления - 2012
Unmanned Aircraft
14-16 марта 2012 Техническое зрение в системах управления - 2012
Unmanned Aircraft

Richard Rumpf
Rumpf Associates International, Inc.
14-16 марта 2012 Техническое зрение в
Richard Rumpf
Rumpf Associates International, Inc.
14-16 марта 2012 Техническое зрение в

Системы улучшенного и синтезированного видения
Системы улучшенного и синтезированного видения

Цифровые изображения
Изображение как двумерный массив данных
Видимое поле представляет собой лишь некоторую
Цифровые изображения
Изображение как двумерный массив данных
Видимое поле представляет собой лишь некоторую

Цифровое изображение
Лабораторная система обработки и анализа изображений Pisoft Image Framework
Цифровое изображение
Лабораторная система обработки и анализа изображений Pisoft Image Framework
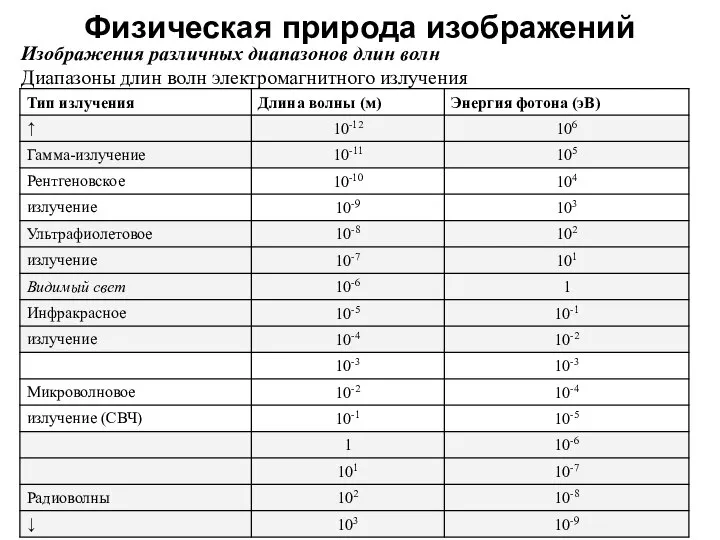
Физическая природа изображений
Изображения различных диапазонов длин волн
Диапазоны длин волн электромагнитного излучения
Физическая природа изображений
Изображения различных диапазонов длин волн
Диапазоны длин волн электромагнитного излучения

Физическая природа изображений
Изображения различных диапазонов длин волн
Характеристики волн видимой части спектра
Физическая природа изображений
Изображения различных диапазонов длин волн
Характеристики волн видимой части спектра
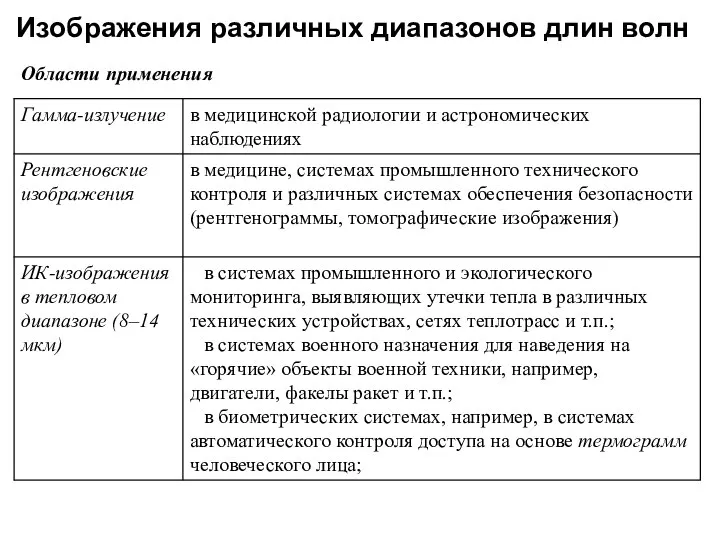
Изображения различных диапазонов длин волн
Области применения
Изображения различных диапазонов длин волн
Области применения

Изображения различной физической природы
Области применения
Многоспектральные изображения: ТВ
Изображения различной физической природы
Области применения
Многоспектральные изображения: ТВ

Типы изображений
Цветные изображения – специальный тип данных,
Типы изображений
Цветные изображения – специальный тип данных,
Компьютерное зрение как область компьютерной обработки информации
Компьютерное и машинное
Компьютерное зрение как область компьютерной обработки информации
Компьютерное и машинное

Компьютерное зрение
Проблемы, связанные с анализом изображений
Разнообразие яркостно-геометрических свойств изображения (яркости,
Компьютерное зрение
Проблемы, связанные с анализом изображений
Разнообразие яркостно-геометрических свойств изображения (яркости,
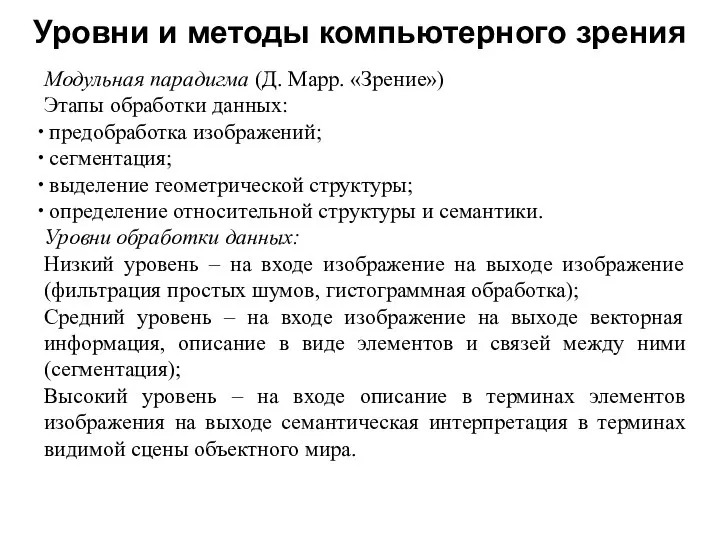
Уровни и методы компьютерного зрения
Модульная парадигма (Д. Марр. «Зрение»)
Этапы обработки
Уровни и методы компьютерного зрения
Модульная парадигма (Д. Марр. «Зрение»)
Этапы обработки

Термины и сопряженные технические дисциплины
Компьютерное зрение (computer vision) изучает теорию и
Термины и сопряженные технические дисциплины
Компьютерное зрение (computer vision) изучает теорию и

Термины и сопряженные технические дисциплины
Зрение роботов (robot vision) включает задачи машинного
Термины и сопряженные технические дисциплины
Зрение роботов (robot vision) включает задачи машинного
Термины и сопряженные технические дисциплины
Обработка изображений (image processing) в узком смысле
Термины и сопряженные технические дисциплины
Обработка изображений (image processing) в узком смысле

Термины и сопряженные технические дисциплины
Цифровая фотограмметрия (digital photogrammetry) в узком смысле
Термины и сопряженные технические дисциплины
Цифровая фотограмметрия (digital photogrammetry) в узком смысле

Требования к алгоритмам машинного зрения
робастность;
точность;
вычислительная реализуемость.
Факторы, осложняющие решение задач:
помехи и
Требования к алгоритмам машинного зрения
робастность;
точность;
вычислительная реализуемость.
Факторы, осложняющие решение задач:
помехи и

Требования к алгоритмам машинного зрения
Факторы, осложняющие решение задач:
эффекты резкой смены
Требования к алгоритмам машинного зрения
Факторы, осложняющие решение задач:
эффекты резкой смены

Компьютерное зрение как обобщение школьной геометрии
Компьютерное зрение как обобщение школьной геометрии

Как найти окружность?
Как найти окружность?

Как найти окружность?
Проблема: Помимо полезных точек есть ложные
Как найти окружность?
Проблема: Помимо полезных точек есть ложные

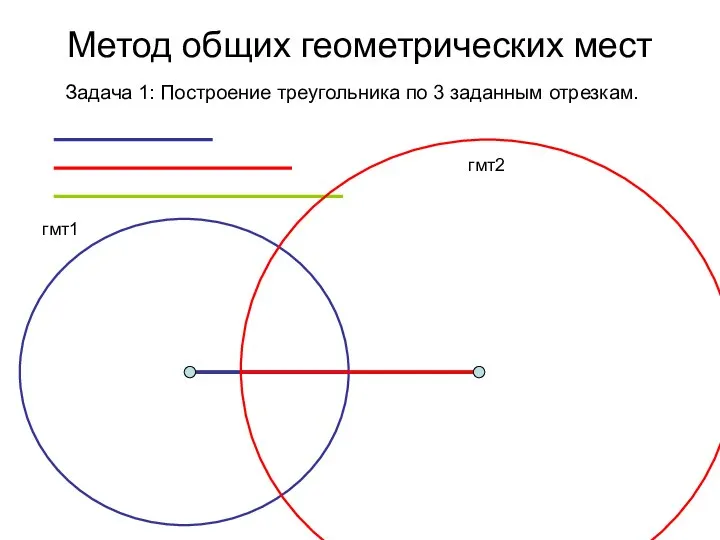
Метод общих геометрических мест
Задача 1: Построение треугольника по 3 заданным отрезкам.
Метод общих геометрических мест
Задача 1: Построение треугольника по 3 заданным отрезкам.

Метод общих геометрических мест
Задача 1: Построение треугольника по 3 заданным отрезкам.
гмт1
Метод общих геометрических мест
Задача 1: Построение треугольника по 3 заданным отрезкам.
гмт1
Метод общих геометрических мест
Задача 1: Построение треугольника по 3 заданным отрезкам.
гмт1
гмт2
Метод общих геометрических мест
Задача 1: Построение треугольника по 3 заданным отрезкам.
гмт1
гмт2

Метод общих геометрических мест
Задача 1: Построение треугольника по 3 заданным отрезкам.
гмт1
гмт2
гмт1
Метод общих геометрических мест
Задача 1: Построение треугольника по 3 заданным отрезкам.
гмт1
гмт2
гмт1

Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.

Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
гмт1
Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
гмт1

Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
гмт1
гмт2
Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
гмт1
гмт2

Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
гмт1
гмт2
гмт1
Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
гмт1
гмт2
гмт1

Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
гмт1
гмт2
гмт1
Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
гмт1
гмт2
гмт1

Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
гмт1
гмт2
гмт1
Метод общих геометрических мест
Задача 2: Построение окружности по 3 заданным точкам.
гмт1
гмт2
гмт1

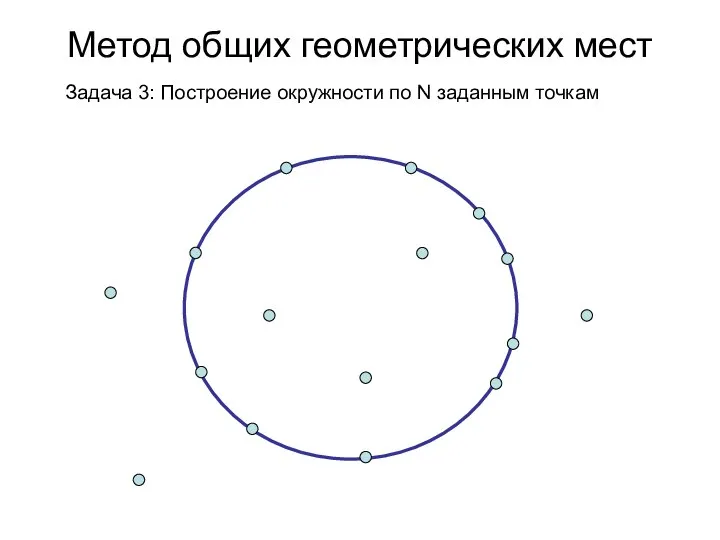
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам

Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
гмт12
R
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
гмт12
R
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
гмт12
гмт23
∩
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
гмт12
гмт23
∩
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
гмт12
гмт23
гмт
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
гмт12
гмт23
гмт

Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
гмт12
гмт23
гмт
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
гмт12
гмт23
гмт

Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
гмт12
гмт23
MAX
Метод общих геометрических мест
Задача 3: Построение окружности по N заданным точкам
гмт12
гмт23
MAX

Компьютерное зрение
как школьная геометрия++
Отличия КЗ от классической геометрии:
1. Увеличение числа
Компьютерное зрение
как школьная геометрия++
Отличия КЗ от классической геометрии:
1. Увеличение числа
 Рекурсия. Рекурсивная функция
Рекурсия. Рекурсивная функция Структуры и объединения данных. (Лекция 13)
Структуры и объединения данных. (Лекция 13) Аттестационная работа. Азбука програмирования (программа элективного курса)
Аттестационная работа. Азбука програмирования (программа элективного курса) Программа тренировок для развития силы и анаэробной выносливости
Программа тренировок для развития силы и анаэробной выносливости Дифференциальные усилители
Дифференциальные усилители Менеджмент в туризме
Менеджмент в туризме Политика как сфера человеческой жизни
Политика как сфера человеческой жизни Event DJ AndRave pres-2
Event DJ AndRave pres-2 Александр Николаевич Яковлев
Александр Николаевич Яковлев Рисуем зимний пейзаж
Рисуем зимний пейзаж Дискретное преобразование Фурье. Введение
Дискретное преобразование Фурье. Введение Карьерные и профессиональные перспективы молодых талантов
Карьерные и профессиональные перспективы молодых талантов Архитектура современного компьютера
Архитектура современного компьютера МУНИЦИПАЛЬНОЕ БЮДЖЕТНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ ШКОЛА № 4 Г. АЛЕКСАНДРОВ
МУНИЦИПАЛЬНОЕ БЮДЖЕТНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ ШКОЛА № 4 Г. АЛЕКСАНДРОВ Тема 3.1: Организация и техника операций в торговле готовой продукцией. Особенности организации и техники по поставке машинотех
Тема 3.1: Организация и техника операций в торговле готовой продукцией. Особенности организации и техники по поставке машинотех Особенности организации работы терапевтического стационара
Особенности организации работы терапевтического стационара  Молодёжные субкультуры
Молодёжные субкультуры Подземная урбанистика (часть 1). Подборка примеров подземных пререходов
Подземная урбанистика (часть 1). Подборка примеров подземных пререходов Презентация Роль и место кадровой службы таможенных органов
Презентация Роль и место кадровой службы таможенных органов  Основы управления интеллектуальной cобственностью
Основы управления интеллектуальной cобственностью Проектирование систем автоматизации. Проектная компоновка УВК
Проектирование систем автоматизации. Проектная компоновка УВК Тип String (java)
Тип String (java) Презентация на тему "Структура самоанализа профессиональной деятельности педагога" - скачать презентации по Педагогике
Презентация на тему "Структура самоанализа профессиональной деятельности педагога" - скачать презентации по Педагогике Рисование шрифта
Рисование шрифта Саяси партиялар мен қоғамдық қозғалыстар
Саяси партиялар мен қоғамдық қозғалыстар VINCENT VAN GOGH (1853-1890)
VINCENT VAN GOGH (1853-1890) Расщепление кристаллов и родственные явления
Расщепление кристаллов и родственные явления Образ Божьей Матери
Образ Божьей Матери