- Моделирование систем управления с управляющими микро ЭВМ

Содержание
- 2. Содержание Моделирование цифровых САУ. Основные положения. Импульсные системы. Система импульсная линейная. Алгоритм моделирования цифровых САУ с
- 3. Введение В настоящее время при создании цифровых автоматизированных систем возможна реализация двух подходов к созданию АСУ:
- 4. В первом случае ЦУЭВМ используется для управления сложными объектами и реализует управление десятками динамических объектов или
- 5. К1, К2-коммутаторы, ЗУ1-ЗУN – запоминающие устройства, ИМ1-ИМN – исполнительные механизмы, Д1-ДN – датчики выходных параметров объектов
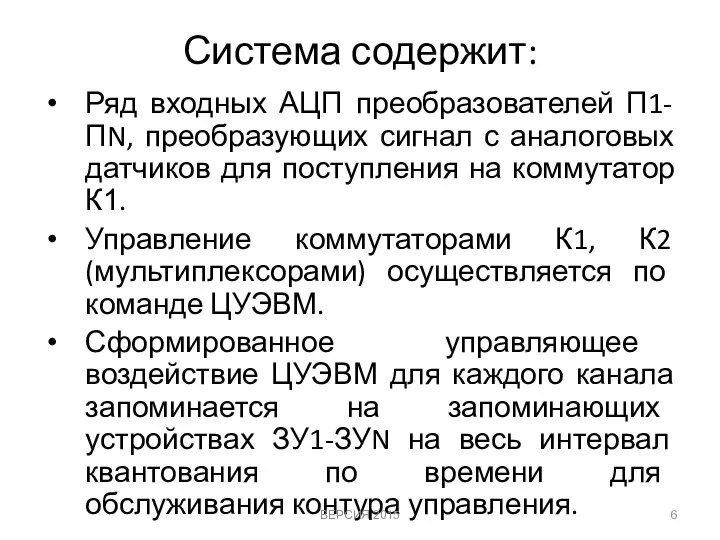
- 6. Система содержит: Ряд входных АЦП преобразователей П1-ПN, преобразующих сигнал с аналоговых датчиков для поступления на коммутатор
- 7. Управляющее воздействие U1-Un в течение интервала квантования поступают на исполнительные механизмы ИМ1-Имn пропорционального или интегрирующего типов,
- 8. Такая система может быть связанной многомерной, если управление осуществляется связанным многомерным объектом, и не связной многомерной,
- 9. АЦП – аналого-цифровой преобразователь ЦАП – цифроаналоговый преобразователь ЦВМ – управляющая ЭВМ АЦП ЦВМ Непрерывная Часть
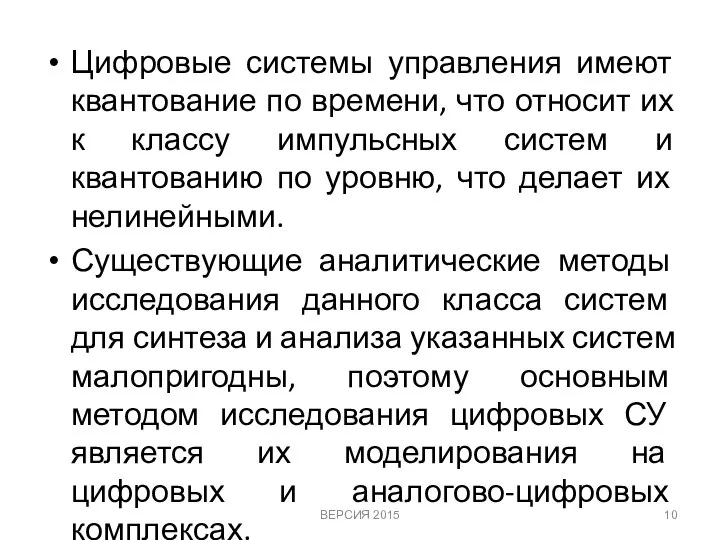
- 10. Цифровые системы управления имеют квантование по времени, что относит их к классу импульсных систем и квантованию
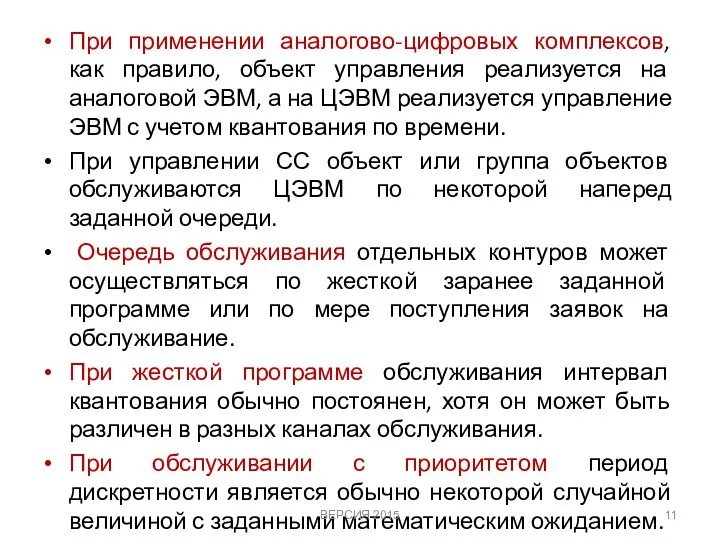
- 11. При применении аналогово-цифровых комплексов, как правило, объект управления реализуется на аналоговой ЭВМ, а на ЦЭВМ реализуется
- 12. 2. Импульсные системы Система импульсная линейная Линейной системой импульсного регулирования называется такая САР, которая кроме звеньев
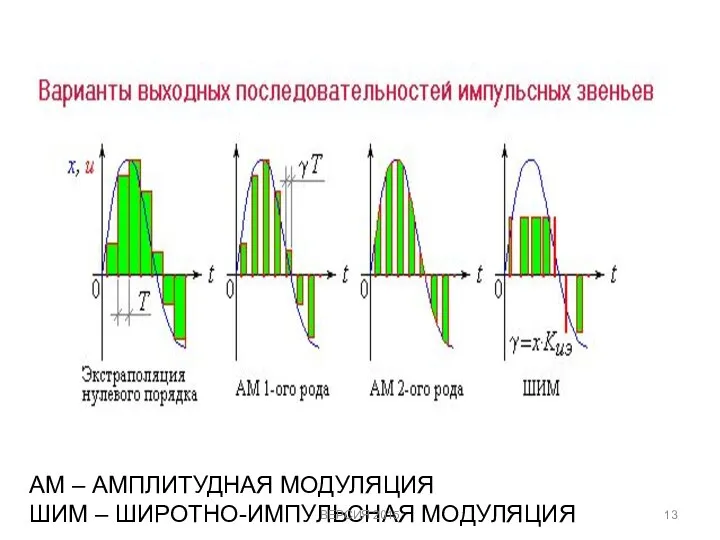
- 13. АМ – АМПЛИТУДНАЯ МОДУЛЯЦИЯ ШИМ – ШИРОТНО-ИМПУЛЬСНАЯ МОДУЛЯЦИЯ ВЕРСИЯ 2015
- 14. Математический аппарат описания импульсных систем Решетчатые функции 1 – НЕПРЕРЫВНАЯ ФУНКЦИЯ 2 – РЕШЕТЧАТАЯ ФУНКЦИЯ 3
- 15. Решетчатые функции 2 определены только в дискретные моменты времени [nT] (сокращенно [n]), и формируются из непрерывных
- 16. Непрерывные функции, проходящие через дискреты заданной решетчатой функции, называют огибающими. Их бесконечно много. ВЕРСИЯ 2015
- 17. Дифференцирование и интегрирование решетчатых функций Аналогом первой производной для решетчатой функции является либо первая прямая разность:
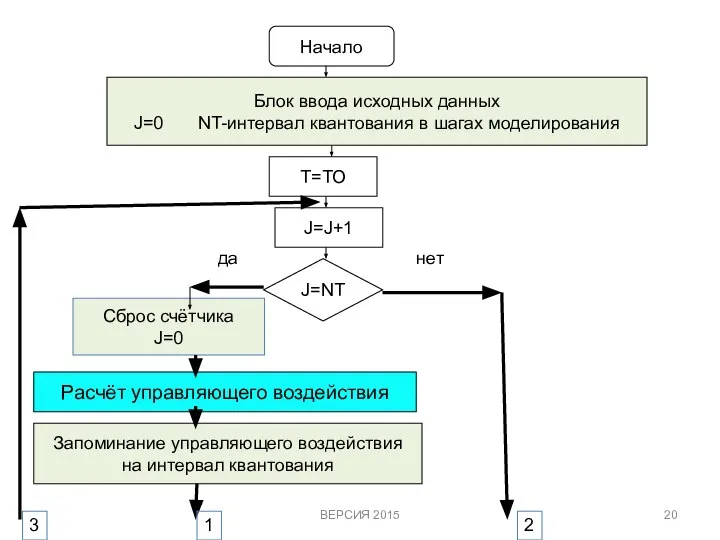
- 18. 3. Алгоритм моделирования цифровых САУ с учетом квантования времени. Рассмотрим методику моделирования цифровых систем управления с
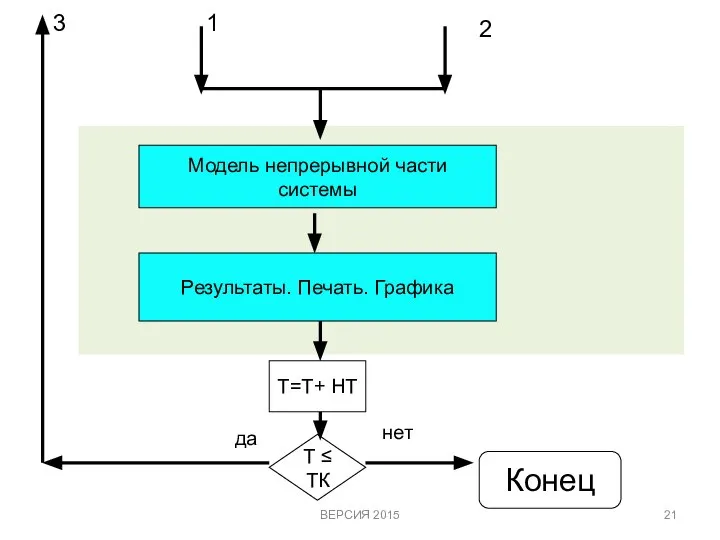
- 19. Модель состоит из двух частей: Модели формирования расчета управляющего воздействия с учетом квантования по времени. Модели
- 20. Начало Блок ввода исходных данных J=0 NT-интервал квантования в шагах моделирования Т=ТО J=J+1 J=NT Сброс счётчика
- 21. Модель непрерывной части системы Результаты. Печать. Графика Т=Т+ НТ Т ≤ ТК 1 2 3 да
- 22. 4. Математические модели объектов и систем с дискретным управлением Дополнительные пояснения для самостоятельного изучения ВЕРСИЯ 2015
- 23. ММ объектов и систем с дискретным управлением Особенности квантования непрерывных сигналов В дискретных системах управляющий сигнал
- 24. Особо выделяют амплитудно-импульсную модуляцию (АИМ) и широтно-импульсную (ШИМ). В первом случае управляемым параметром импульса является величина
- 25. микропроцессорное управление В настоящее время широко используется микропроцессорное управление. Здесь изменение управляющего воздействия также происходит дискретно
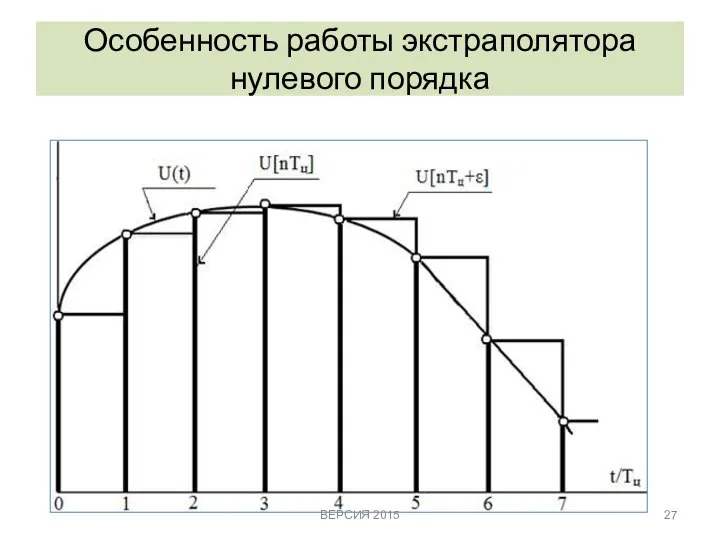
- 26. На практике чаще всего используются экстраполяторы нулевого и первого порядков. В экстраполяторах нулевого порядка уровень сигнала
- 27. Особенность работы экстраполятора нулевого порядка ВЕРСИЯ 2015
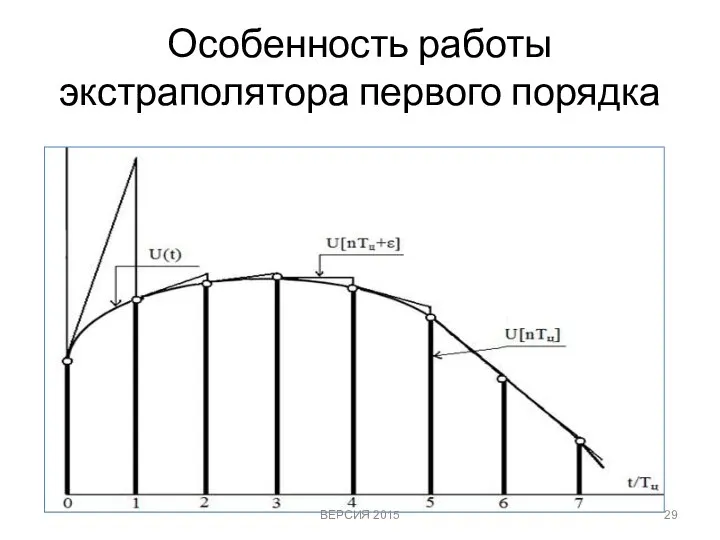
- 28. В экстраполяторах первого порядка управляющий сигнал формируется с учетом первой производной входного сигнала U(t) на момент
- 29. Особенность работы экстраполятора первого порядка ВЕРСИЯ 2015
- 30. Из рисунка также видно, что коррекция с помощью экстраполятора первого порядка не на всем временном интервале
- 31. К дискретным следует также отнести системы, в которых управление изменяется скачкообразно не вследствие временной модуляции, в
- 33. Скачать презентацию
Содержание
Моделирование цифровых САУ. Основные положения.
Импульсные системы. Система импульсная линейная.
Алгоритм моделирования
Содержание
Моделирование цифровых САУ. Основные положения.
Импульсные системы. Система импульсная линейная.
Алгоритм моделирования
Введение
В настоящее время при создании цифровых автоматизированных систем возможна реализация двух
Введение
В настоящее время при создании цифровых автоматизированных систем возможна реализация двух
В первом случае ЦУЭВМ используется для управления сложными объектами и реализует
В первом случае ЦУЭВМ используется для управления сложными объектами и реализует
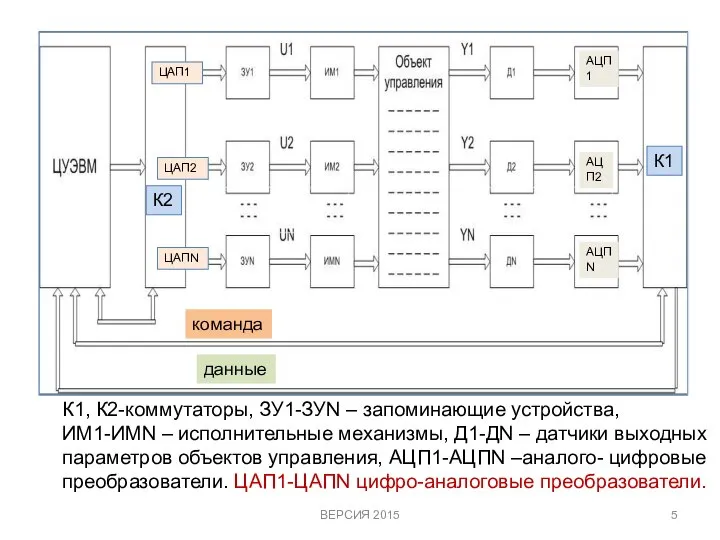
К1, К2-коммутаторы, ЗУ1-ЗУN – запоминающие устройства,
ИМ1-ИМN – исполнительные механизмы, Д1-ДN
К1, К2-коммутаторы, ЗУ1-ЗУN – запоминающие устройства,
ИМ1-ИМN – исполнительные механизмы, Д1-ДN
Система содержит:
Ряд входных АЦП преобразователей П1-ПN, преобразующих сигнал с аналоговых датчиков
Система содержит:
Ряд входных АЦП преобразователей П1-ПN, преобразующих сигнал с аналоговых датчиков
Управляющее воздействие U1-Un в течение интервала квантования поступают на исполнительные механизмы
Управляющее воздействие U1-Un в течение интервала квантования поступают на исполнительные механизмы
Такая система может быть связанной многомерной, если управление осуществляется связанным многомерным
Такая система может быть связанной многомерной, если управление осуществляется связанным многомерным
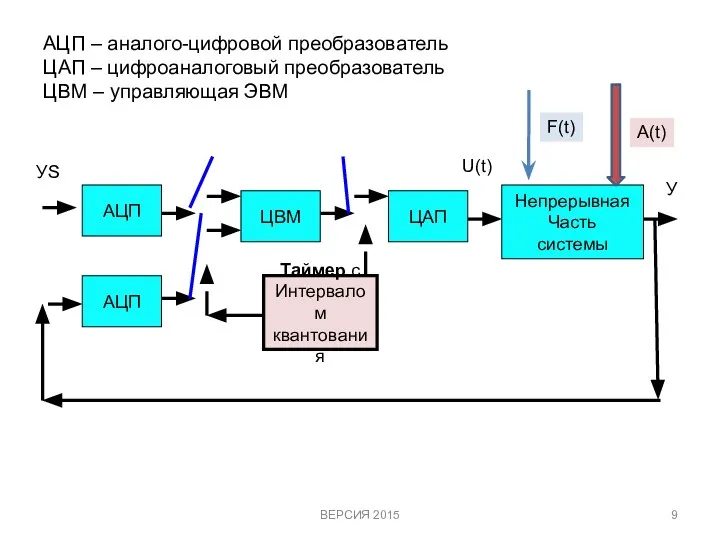
АЦП – аналого-цифровой преобразователь
ЦАП – цифроаналоговый преобразователь
ЦВМ – управляющая ЭВМ
АЦП
ЦВМ
Непрерывная
Часть
системы
ЦАП
АЦП
Таймер с
Интервалом
квантования
УS
У
U(t)
ВЕРСИЯ
АЦП – аналого-цифровой преобразователь
ЦАП – цифроаналоговый преобразователь
ЦВМ – управляющая ЭВМ
АЦП
ЦВМ
Непрерывная
Часть
системы
ЦАП
АЦП
Таймер с
Интервалом
квантования
УS
У
U(t)
ВЕРСИЯ
Цифровые системы управления имеют квантование по времени, что относит их к
Цифровые системы управления имеют квантование по времени, что относит их к
При применении аналогово-цифровых комплексов, как правило, объект управления реализуется на аналоговой
При применении аналогово-цифровых комплексов, как правило, объект управления реализуется на аналоговой
2. Импульсные системы
Система импульсная линейная
Линейной системой импульсного регулирования называется такая
2. Импульсные системы
Система импульсная линейная
Линейной системой импульсного регулирования называется такая
АМ – АМПЛИТУДНАЯ МОДУЛЯЦИЯ
ШИМ – ШИРОТНО-ИМПУЛЬСНАЯ МОДУЛЯЦИЯ
ВЕРСИЯ 2015
АМ – АМПЛИТУДНАЯ МОДУЛЯЦИЯ
ШИМ – ШИРОТНО-ИМПУЛЬСНАЯ МОДУЛЯЦИЯ
ВЕРСИЯ 2015
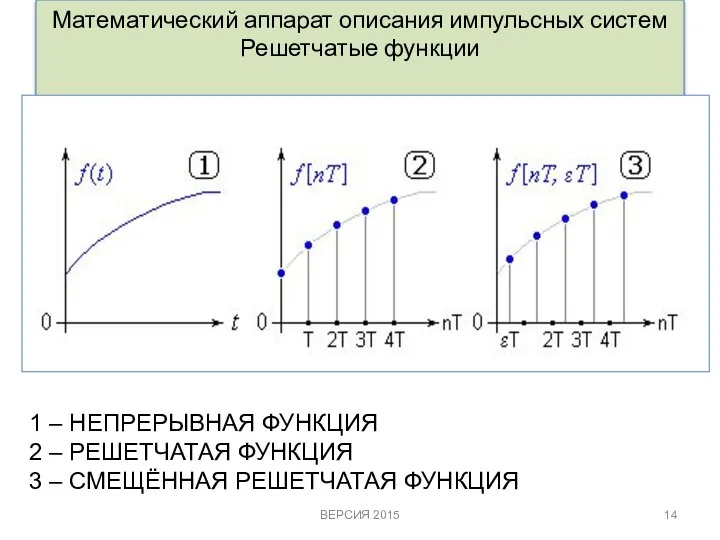
Математический аппарат описания импульсных систем
Решетчатые функции
1 – НЕПРЕРЫВНАЯ ФУНКЦИЯ
2 – РЕШЕТЧАТАЯ
Математический аппарат описания импульсных систем
Решетчатые функции
1 – НЕПРЕРЫВНАЯ ФУНКЦИЯ
2 – РЕШЕТЧАТАЯ
![Решетчатые функции 2 определены только в дискретные моменты времени [nT] (сокращенно](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1470348/slide-14.jpg)
Решетчатые функции 2 определены только в дискретные моменты времени [nT] (сокращенно [n]),
Решетчатые функции 2 определены только в дискретные моменты времени [nT] (сокращенно [n]),
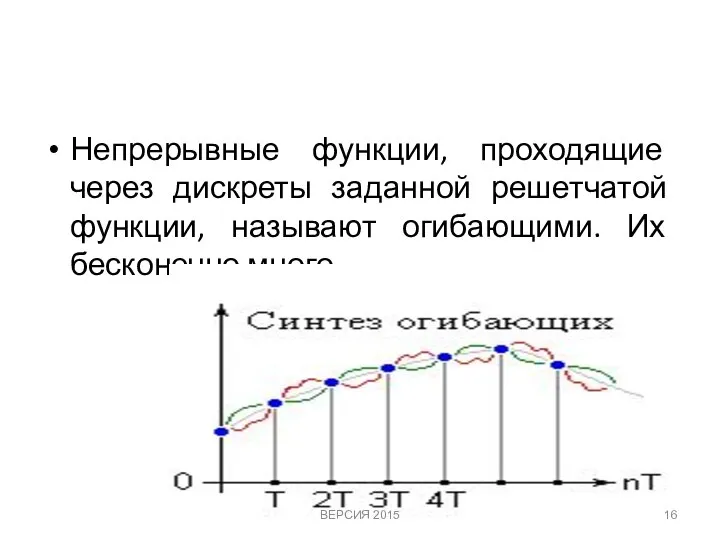
Непрерывные функции, проходящие через дискреты заданной решетчатой функции, называют огибающими. Их
Непрерывные функции, проходящие через дискреты заданной решетчатой функции, называют огибающими. Их
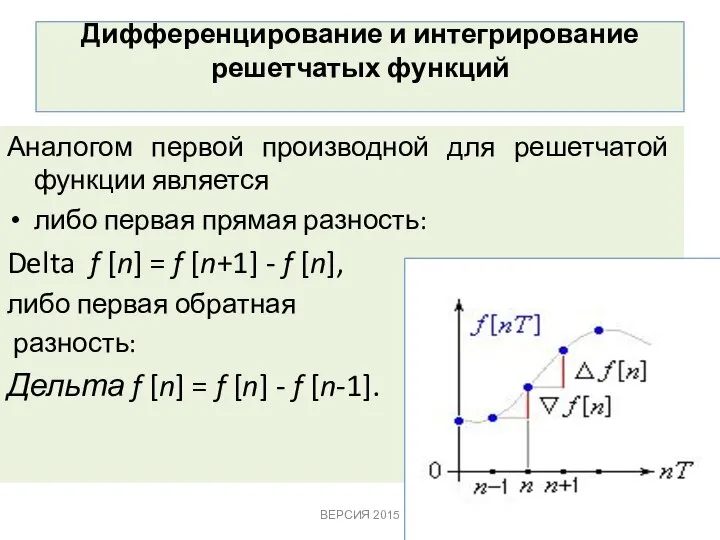
Дифференцирование и интегрирование решетчатых функций
Аналогом первой производной для решетчатой функции является
Дифференцирование и интегрирование решетчатых функций
Аналогом первой производной для решетчатой функции является
3. Алгоритм моделирования цифровых САУ с учетом квантования времени.
Рассмотрим методику моделирования
3. Алгоритм моделирования цифровых САУ с учетом квантования времени.
Рассмотрим методику моделирования
Модель состоит из двух частей:
Модели формирования расчета управляющего воздействия с учетом
Модель состоит из двух частей:
Модели формирования расчета управляющего воздействия с учетом
Начало
Блок ввода исходных данных
J=0 NT-интервал квантования в шагах моделирования
Т=ТО
J=J+1
J=NT
Сброс счётчика
J=0
Расчёт управляющего
Начало
Блок ввода исходных данных
J=0 NT-интервал квантования в шагах моделирования
Т=ТО
J=J+1
J=NT
Сброс счётчика
J=0
Расчёт управляющего
Модель непрерывной части системы
Результаты. Печать. Графика
Т=Т+ НТ
Т ≤ ТК
1
2
3
да
Конец
нет
ВЕРСИЯ 2015
Модель непрерывной части системы
Результаты. Печать. Графика
Т=Т+ НТ
Т ≤ ТК
1
2
3
да
Конец
нет
ВЕРСИЯ 2015
4. Математические модели объектов и систем с дискретным управлением
Дополнительные пояснения для
4. Математические модели объектов и систем с дискретным управлением
Дополнительные пояснения для
ММ объектов и систем с дискретным управлением
Особенности квантования непрерывных сигналов
В дискретных
ММ объектов и систем с дискретным управлением
Особенности квантования непрерывных сигналов
В дискретных
Особо выделяют амплитудно-импульсную модуляцию (АИМ) и широтно-импульсную (ШИМ).
В первом случае
Особо выделяют амплитудно-импульсную модуляцию (АИМ) и широтно-импульсную (ШИМ).
В первом случае
микропроцессорное управление
В настоящее время широко используется микропроцессорное управление.
Здесь изменение
микропроцессорное управление
В настоящее время широко используется микропроцессорное управление.
Здесь изменение
На практике чаще всего используются экстраполяторы нулевого и первого порядков.
В
На практике чаще всего используются экстраполяторы нулевого и первого порядков.
В
Особенность работы экстраполятора нулевого порядка
ВЕРСИЯ 2015
Особенность работы экстраполятора нулевого порядка
ВЕРСИЯ 2015
В экстраполяторах первого порядка управляющий сигнал формируется с учетом первой производной
В экстраполяторах первого порядка управляющий сигнал формируется с учетом первой производной
Особенность работы экстраполятора первого порядка
ВЕРСИЯ 2015
Особенность работы экстраполятора первого порядка
ВЕРСИЯ 2015
Из рисунка также видно, что коррекция с помощью экстраполятора первого порядка
Из рисунка также видно, что коррекция с помощью экстраполятора первого порядка
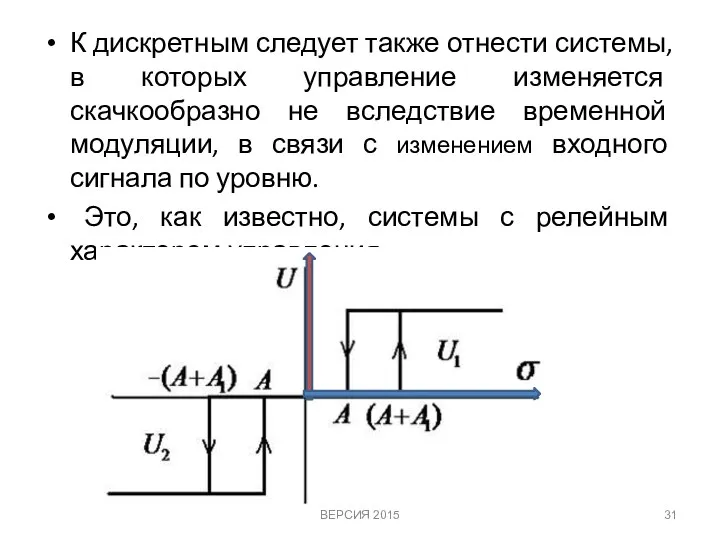
К дискретным следует также отнести системы, в которых управление изменяется скачкообразно
К дискретным следует также отнести системы, в которых управление изменяется скачкообразно
 Знаменитые русские иконы
Знаменитые русские иконы Частушки на злобу дня - презентация для начальной школы
Частушки на злобу дня - презентация для начальной школы Создание хореографического образа в балете, посредством классического танца
Создание хореографического образа в балете, посредством классического танца Презентация Глобальные проблемы современности
Презентация Глобальные проблемы современности Классификация определения годности спортсмена к занятиям бочча в соответствии с физическим поражением
Классификация определения годности спортсмена к занятиям бочча в соответствии с физическим поражением День валентина - презентация для начальной школы_
День валентина - презентация для начальной школы_ Президент Индии Пранаб Мукерджи
Президент Индии Пранаб Мукерджи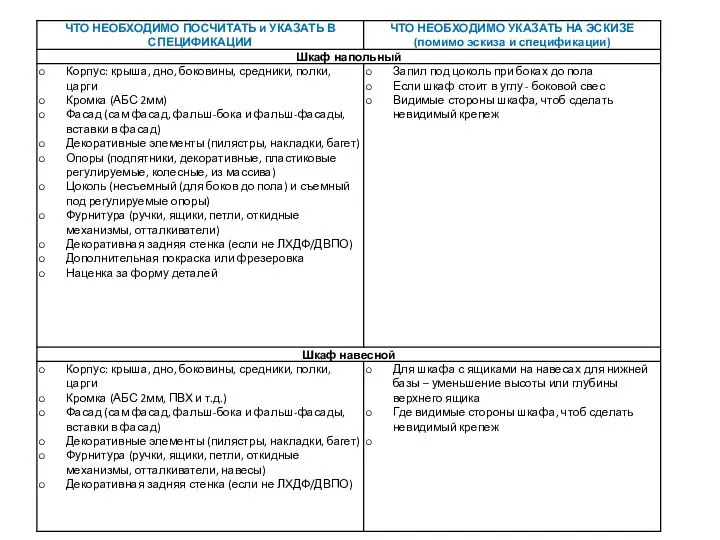 Шкаф напольный
Шкаф напольный Олимпийские игры, олимпизм, олимпийское движение (от античности до современности)
Олимпийские игры, олимпизм, олимпийское движение (от античности до современности) Міст. Патерни проектування
Міст. Патерни проектування Гжельская роспись
Гжельская роспись Стратегическое и оперативное управление компанией
Стратегическое и оперативное управление компанией  Expressions de nos grands parents
Expressions de nos grands parents "Цитадель искусства"
"Цитадель искусства" Презентация на тему "Сердечные гликозиды. Негикозидные кардиотонические средства" - скачать презентации по Медицине
Презентация на тему "Сердечные гликозиды. Негикозидные кардиотонические средства" - скачать презентации по Медицине Гоголь и театр - презентация для начальной школы
Гоголь и театр - презентация для начальной школы Презентация Политическая карта мира
Презентация Политическая карта мира Тест по темам: «Суждение» , «Умозаключение» подготовил: Дубов алексей Т -113
Тест по темам: «Суждение» , «Умозаключение» подготовил: Дубов алексей Т -113 Первообразная Правила нахождения первообразных
Первообразная Правила нахождения первообразных Постсовременные формы государства. Этапы в развитии государства, как политического института
Постсовременные формы государства. Этапы в развитии государства, как политического института Визуальный инструмент разработки автоматических спецпрограмм проверки РЗА, ООО «НПП «Динамика»
Визуальный инструмент разработки автоматических спецпрограмм проверки РЗА, ООО «НПП «Динамика» Пам’ятки природи України Оспа Г. В., вчитель початкових класів Шахтарської СЗШ
Пам’ятки природи України Оспа Г. В., вчитель початкових класів Шахтарської СЗШ Величие многонациональной российской культуры
Величие многонациональной российской культуры Презентация Диффузионистское направление в изучении культуры.
Презентация Диффузионистское направление в изучении культуры. Общие сведения о спутниковых РНС
Общие сведения о спутниковых РНС Дорога к дому Одесский благотворительный Фонд Одесса,Украина The Way Home Humanitarian Fund Odessa, Ukraine
Дорога к дому Одесский благотворительный Фонд Одесса,Украина The Way Home Humanitarian Fund Odessa, Ukraine Сестрица Аленушка и братец Иванушка - презентация для начальной школы
Сестрица Аленушка и братец Иванушка - презентация для начальной школы Решение задач на сравнение чисел 3 класс
Решение задач на сравнение чисел 3 класс