- Надежность промышленных роботов

Содержание
- 2. Промышленный робот - это автономное устройство, состоящее из механического манипулятора и программируемой системы управления. Робот применяется
- 3. История появления первых промышленных роботов В 1954 году американский инженер Д. Девол запатентовал способ управления погрузочно-разгрузочным
- 4. История появления первых промышленных роботов Рисунок 3 – «Юнимэйт» - первый промышленный робот Рисунок 4 –
- 5. Рисунок 5 – Общая схема ПР 1 - датчик обратной связи; 2 - захватное устройство; 3
- 6. Функциональные особенности промышленного робота Рисунок 1. Структурные составляющие ПР Исполнительное устройство Система управления Информационная система Манипулятор
- 7. Управление промышленными роботами Программное управление; Адаптивное управление; Основанное на методах искусственного интеллекта; Управление человеком.
- 8. Действия промышленного робота Перемещение деталей и заготовок; Загрузка-выгрузка; Сварка швов и точечная сварка; Покраска; Выполнение операций
- 9. • Повышение производительности Улучшение экономических показателей Повышение качества обработки Повышения уровня безопасности Минимизация рабочего пространства Минимальное
- 10. Надежность роботов характеризуют следующие показатели: Средняя наработка на отказ; Среднее время восстановления работоспособного состояния; Срок службы
- 11. Средняя наработка на отказ при цикловой системе управления составляет 400 ч, при позиционной системе управления —
- 12. Первая группа: вызванные нарушением технологии изготовления отдельных элементов; Вторая группа: вызванные дефектами комплектующих изделий; Третья группа:
- 13. К величине момента; К скорости разгона; К остановке при минимальных габаритах и массе двигателя. Электропривод; Пневмопривод;
- 14. Число экземпляров: два или три; Виды испытаний: определительные и контрольные; Периодичность: раз в два - три
- 15. Заключение Роботы в промышленности выполняют как основные, так и вспомогательные работы. Конструктивно роботы должны быть надежными
- 17. Скачать презентацию
Промышленный робот - это автономное устройство, состоящее из механического манипулятора
Промышленный робот - это автономное устройство, состоящее из механического манипулятора
История появления первых промышленных роботов
В 1954 году американский инженер Д.
История появления первых промышленных роботов
В 1954 году американский инженер Д.

История появления первых промышленных роботов
Рисунок 3 – «Юнимэйт» - первый
промышленный робот
Рисунок
История появления первых промышленных роботов
Рисунок 3 – «Юнимэйт» - первый
промышленный робот
Рисунок

Рисунок 5 – Общая схема ПР
1 - датчик обратной связи; 2
Рисунок 5 – Общая схема ПР 1 - датчик обратной связи; 2
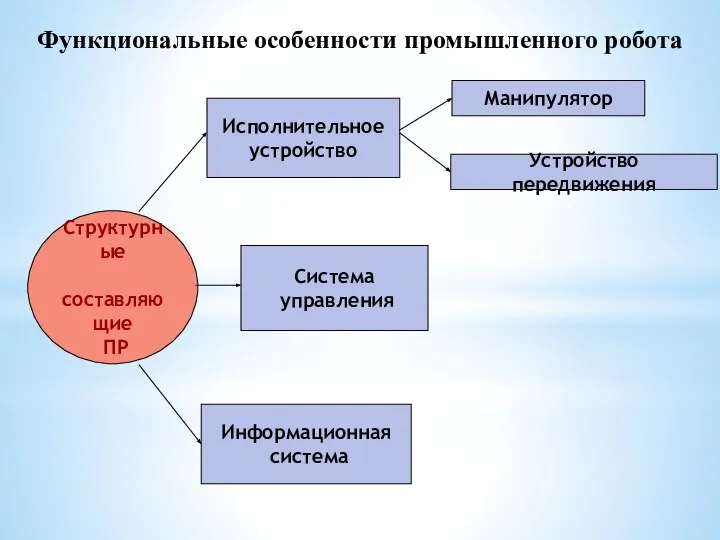
Функциональные особенности промышленного робота
Рисунок 1.
Структурные
составляющие
ПР
Исполнительное
устройство
Система
управления
Информационная
система
Манипулятор
Устройство передвижения
Функциональные особенности промышленного робота
Рисунок 1.
Структурные
составляющие
ПР
Исполнительное
устройство
Система
управления
Информационная
система
Манипулятор
Устройство передвижения
Управление промышленными роботами
Программное управление;
Адаптивное управление;
Основанное на методах искусственного интеллекта;
Управление
Управление промышленными роботами
Программное управление;
Адаптивное управление;
Основанное на методах искусственного интеллекта;
Управление
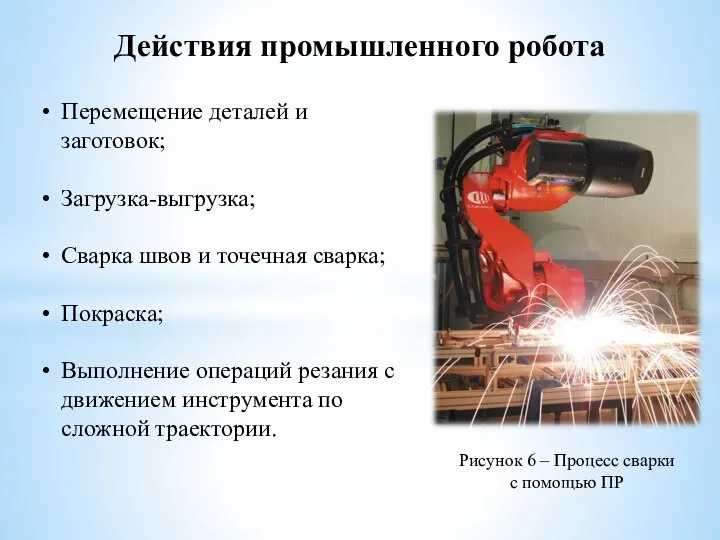
Действия промышленного робота
Перемещение деталей и заготовок;
Загрузка-выгрузка;
Сварка швов и точечная сварка;
Покраска;
Выполнение операций
Действия промышленного робота
Перемещение деталей и заготовок;
Загрузка-выгрузка;
Сварка швов и точечная сварка;
Покраска;
Выполнение операций
• Повышение производительности
Улучшение экономических показателей
Повышение качества обработки
Повышения уровня безопасности
Минимизация
• Повышение производительности
Улучшение экономических показателей
Повышение качества обработки
Повышения уровня безопасности
Минимизация
Надежность роботов характеризуют следующие показатели:
Средняя наработка на отказ;
Среднее время восстановления работоспособного
Надежность роботов характеризуют следующие показатели:
Средняя наработка на отказ;
Среднее время восстановления работоспособного
Средняя наработка на отказ при цикловой системе управления составляет 400 ч,
Средняя наработка на отказ при цикловой системе управления составляет 400 ч,
Первая группа: вызванные нарушением технологии изготовления отдельных элементов;
Вторая группа: вызванные дефектами
Первая группа: вызванные нарушением технологии изготовления отдельных элементов;
Вторая группа: вызванные дефектами
К величине момента;
К скорости разгона;
К остановке при минимальных габаритах и массе
К величине момента;
К скорости разгона;
К остановке при минимальных габаритах и массе
Число экземпляров: два или три;
Виды испытаний: определительные и контрольные;
Периодичность: раз в
Число экземпляров: два или три;
Виды испытаний: определительные и контрольные;
Периодичность: раз в
Заключение
Роботы в промышленности выполняют как основные, так и вспомогательные работы.
Конструктивно
Заключение
Роботы в промышленности выполняют как основные, так и вспомогательные работы.
Конструктивно
 Презентация "Витраж (5 класс)" - скачать презентации по МХК
Презентация "Витраж (5 класс)" - скачать презентации по МХК Презентация Государственный заказ
Презентация Государственный заказ УРОК ЛИТЕРАТУРНОГО ЧТЕНИЯ ПО ПРОГРАММЕ «ШКОЛА 2100» 2 класс А. Толстой «Золотой ключик, или приключения Буратино»
УРОК ЛИТЕРАТУРНОГО ЧТЕНИЯ ПО ПРОГРАММЕ «ШКОЛА 2100» 2 класс А. Толстой «Золотой ключик, или приключения Буратино» Технология Superpave, как инновационный метод проектирования асфальтобетонных смесей
Технология Superpave, как инновационный метод проектирования асфальтобетонных смесей Соединения на гвоздях и клеях
Соединения на гвоздях и клеях Политические партии Российской Федерации
Политические партии Российской Федерации Физиологические и биохимические основы физической культуры
Физиологические и биохимические основы физической культуры Встреча с медведем
Встреча с медведем Правовое регулирование участия публично-правовых образований в вещных правоотношениях. Подготовили: студентки 2 курса, Юр. Фа
Правовое регулирование участия публично-правовых образований в вещных правоотношениях. Подготовили: студентки 2 курса, Юр. Фа Топология сети
Топология сети  Правительства, системы и режимы
Правительства, системы и режимы От рукописи к кибертелепатии
От рукописи к кибертелепатии Презентация на тему "АЯҚ ҚАҢҚАСЫ" - скачать презентации по Медицине
Презентация на тему "АЯҚ ҚАҢҚАСЫ" - скачать презентации по Медицине Педагогические lookи
Педагогические lookи Культура периода феодальной раздробленности на Руси
Культура периода феодальной раздробленности на Руси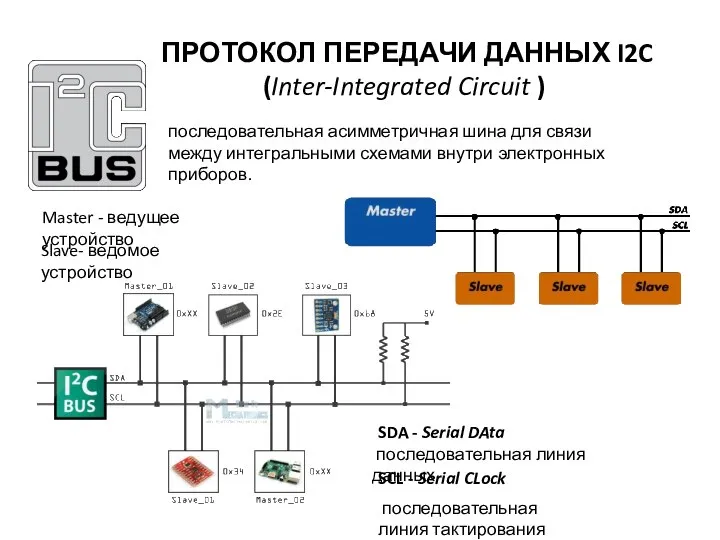 Протокол передачи данных I2C
Протокол передачи данных I2C Крутые машины
Крутые машины Подросток и закон. Правовой статус несовершеннолетних с рождения до совершеннолетия
Подросток и закон. Правовой статус несовершеннолетних с рождения до совершеннолетия Выпуклый анализ. Выпуклые множества. Лекция 4
Выпуклый анализ. Выпуклые множества. Лекция 4 Гордость - чувство собственного достоинства
Гордость - чувство собственного достоинства Графики: сложно, просто, интересно «Графики для всех» Кулигина Валентина Николаевна МБОУ СОШ №199
Графики: сложно, просто, интересно «Графики для всех» Кулигина Валентина Николаевна МБОУ СОШ №199 Презентация Договор коммерческой концессии, ст. 54 ГК «О коммерческой концессии» регламентация передачи прав в франчайзинге
Презентация Договор коммерческой концессии, ст. 54 ГК «О коммерческой концессии» регламентация передачи прав в франчайзинге  Аватария
Аватария Радиографические методы диагностирования
Радиографические методы диагностирования Размещение инженерных сетей на улицах и проездах
Размещение инженерных сетей на улицах и проездах Велопоход на Виштынец - 2016
Велопоход на Виштынец - 2016 Выпускная квалификационная работа: «Блок управления холодильными машинами типа ТРМ 974
Выпускная квалификационная работа: «Блок управления холодильными машинами типа ТРМ 974 редкие заболевания, часто обнаруживаются при аутопсии (<1% вскрытий). редкие заболевания, часто обнаруживаются при аутопсии (<1% в
редкие заболевания, часто обнаруживаются при аутопсии (<1% вскрытий). редкие заболевания, часто обнаруживаются при аутопсии (<1% в