- Общие понятия ЛСУ

Содержание
- 2. Общие требования к ЛС Энергоёмкость. Вид потребляемой энергии. Надёжность работы. Быстродействие. Точность поддержания регулируемого параметра (не
- 3. Рассмотрим процесс двустороннего регулирования: Выводы: двустороннее управление любой координаты объекта управления около начального уровня только при
- 4. Математические модели ОУ у(t) – переменное состояние; x(t) – входящие сигналы; u(t) – выходящие сигналы. Уравнение
- 5. Введём: Уравнение ракеты, вертикально стартующей под действием силы тяги Получим Разностное уравнение для описания элементов дискретного
- 6. Такт квантования системы – это та частота, с которой опрашиваются датчики. Для написания программы системы управления
- 7. Методы линеаризации уравнений Четыре метода линеаризации. Нелинейная функция в рабочей области раскладывается в ряд Тейлора. Заданные
- 8. Сначала составить структурную схему и объединить передаточные функции. Написать, как это упростить до W1234. При проектировании
- 9. Нестационарный объект: Математические модели нелинейных объектов. Весь класс существенных нелинейностей делится на 2-ве группы. К первой
- 10. y=F(x) x(t)=x1(t) y1(t)=a(x1)x1(t) Приближённое значение передаточной функции: Ко второй группе относятся двузначные нелинейности, у которых связь
- 11. Эквивалентная передаточная функция: y(x1)=a(x1)+jb(x1) k – номер гармоники. Матрицы и являются периодическими с периодом Т. В
- 12. Пусть на вход нелинейности поступает первая гармоника синусоидального сигнала: F – приближенное значение передаточной функции по
- 13. Из матрицы получаем коэффициенты гармонической линеаризации. Пусть на вход однозначной нелинейности поступает сигнал: На выходе: И
- 14. Пример: А>>С k – тангенс угла наклона k=tgβ Для МП W=1 Далее от W(p)=>W(z) y1(t)=F(x0,A)+Aa(x0,A)·sinωt+Ab(x0,A)cosωt F(x0,A),
- 15. Элементный синтез Кв - конвейер винтовой, Q [кг/с]; Р – редуктор, ω [рад/с]; Д – двигатель,
- 16. Выбор и обоснование каждого звена ЛСУ по предыдущим критериям Из этих критериев основными являются все, но
- 17. Статическая линеаризация существенных нелинейных элементов. В системах автоматического регулирования в реальных условиях на вход существенных нелинейных
- 18. Совместная гармоническая и статическая линеаризация. При поступлении на вход нелинейного элемента суммы 2-х сигналов Можно считать,
- 19. входной сигнал является гармоническим: x(t)=Asin(ωt+φ), где nT0 – полупериод гармонического колебания y1(kT0)=F[Asin(ωt+φ)]δ(t) Подбирается: – наибольшее квадратическое
- 20. Структурные схемы локальных систем в векторно-матричной форме а) с отработкой ошибок от сигналов управления и возмущения,
- 21. Управляемость и наблюдаемость Сформулируем понятие управляемости и наблюдаемости для любых систем, в которых протекают изменяемые во
- 22. Построение переходных процессов с помощью импульсных переходных функций В случае действия ЛСА управляющего или возмущающего воздействия
- 23. где l – число возмущений g0 – управление fk0 – возмущение Движение с постоянной скоростью g(t)=υ(t);
- 24. Разложим ПФ по ошибке в ряд по возрастающим степеням Р: Переходя к оригиналу, получаем формулу для
- 25. Определение характеристик точности дискретных и дискретно-непрерывных ЛСА Синтез ЛСА Состоит в выборе структуры и параметров системы
- 26. Дискретно-непрерывные линейные и нелинейные системы. Рассмотрим прямое программирование: При прямом программировании по передаточной функции определяем разностное
- 27. Последовательное программирование. При параллельном программировании: Если есть Wky(jλ)=, то можем составить программу коррекции. 1) Производим обратно
- 28. Расчёт ПФ двигателя. Электрический km – моментальная постоянная электродвигателя Ra – сумма сопротивлений обмоток якоря электродвигателя,
- 29. Пневматический двигатель P10 – установившееся давление в 1-ой и 2-ой полостях силового цилиндра P0 – давление
- 30. Критерии выбора вычислительных устройств 1) критерий технической эффективности. В качестве этого критерия используется эффективное быстродействие машины.
- 31. Адаптивные системы 1. Системы экстремального регулирования Системами экстремального регулирования называются системы, в которых задающие воздействия, то
- 32. Средние значение выходных величин синхронных детекторов Разложим функцию F в окрестности этой точки в степенной ряд.
- 33. Способ производной по времени Производная по функции времени определяется выражением: Из выражения следует, что, задавая поочерёдно
- 34. Способ наискорейшего спуска При способе наискорейшего спуска движение происходит по начальному направлению вектора градиента до тех
- 35. Структурная схема исследования динамики экстремальной системы В n-мерном пространстве: Характеристическое уравнение для каждого из каналов
- 36. Самонастраивающиеся системы (с.с.) С.с. регулирования должны обеспечивать необходимое качество процессов регулирования. При изменении свойств объекта регулирования
- 38. Скачать презентацию
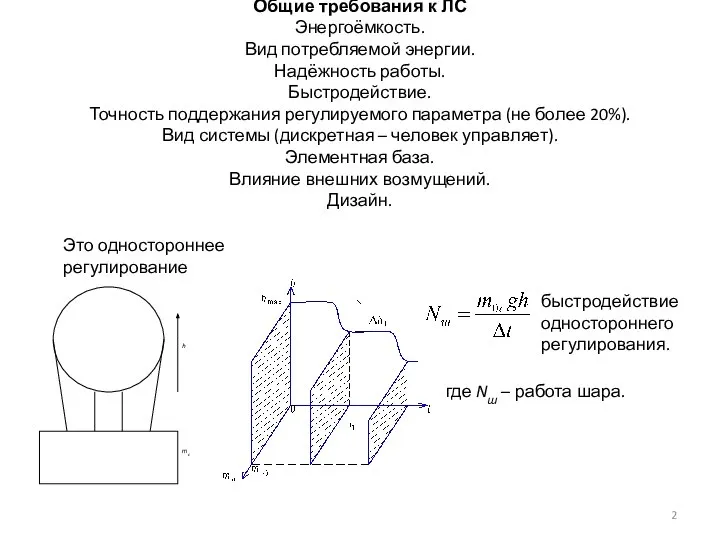
Общие требования к ЛС
Энергоёмкость.
Вид потребляемой энергии.
Надёжность работы.
Быстродействие.
Точность поддержания регулируемого параметра (не
Общие требования к ЛС Энергоёмкость. Вид потребляемой энергии. Надёжность работы. Быстродействие. Точность поддержания регулируемого параметра (не
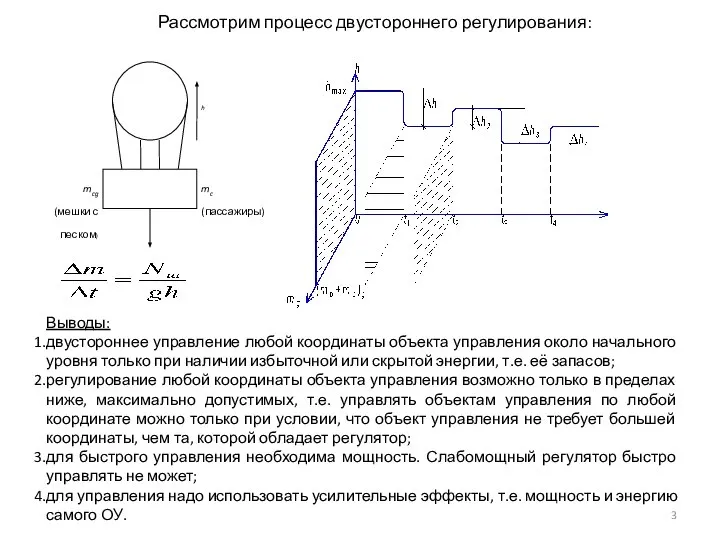
Рассмотрим процесс двустороннего регулирования:
Выводы:
двустороннее управление любой координаты объекта управления около начального
Рассмотрим процесс двустороннего регулирования:
Выводы:
двустороннее управление любой координаты объекта управления около начального
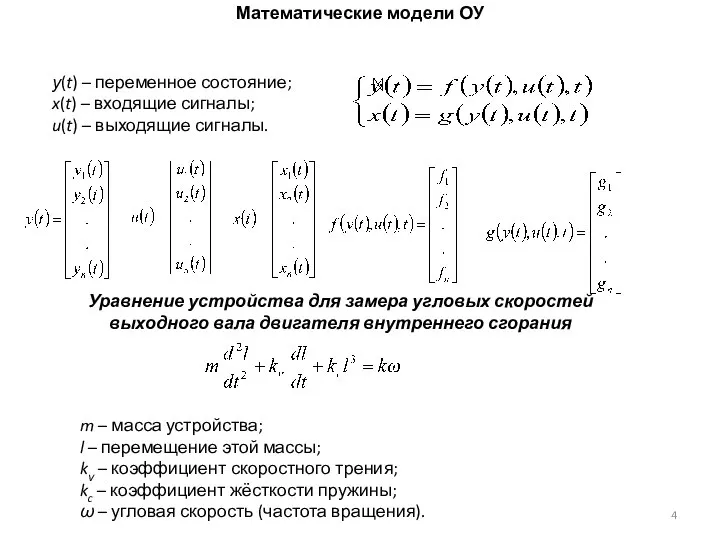
Математические модели ОУ
у(t) – переменное состояние;
x(t) – входящие сигналы;
u(t) – выходящие
Математические модели ОУ
у(t) – переменное состояние;
x(t) – входящие сигналы;
u(t) – выходящие
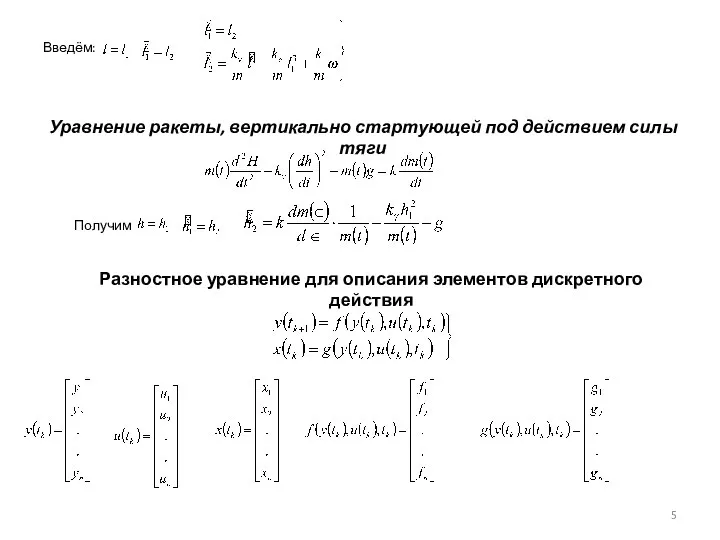
Введём:
Уравнение ракеты, вертикально стартующей под действием силы тяги
Получим
Разностное уравнение для описания
Введём:
Уравнение ракеты, вертикально стартующей под действием силы тяги
Получим
Разностное уравнение для описания
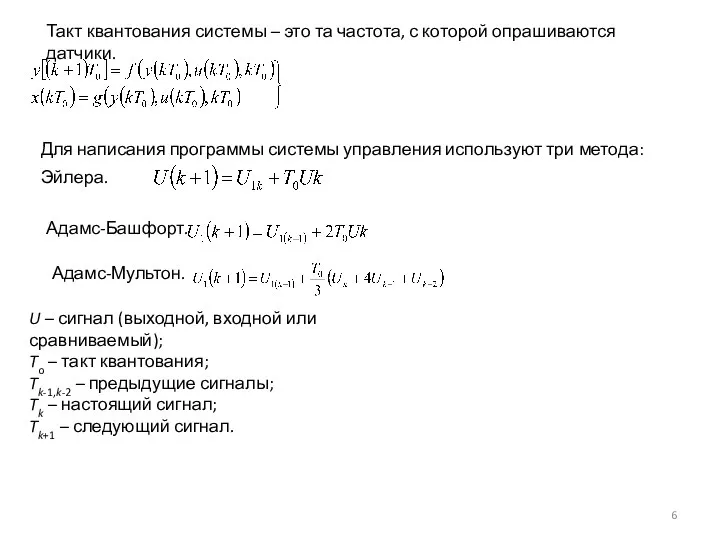
Такт квантования системы – это та частота, с которой опрашиваются датчики.
Для
Такт квантования системы – это та частота, с которой опрашиваются датчики.
Для
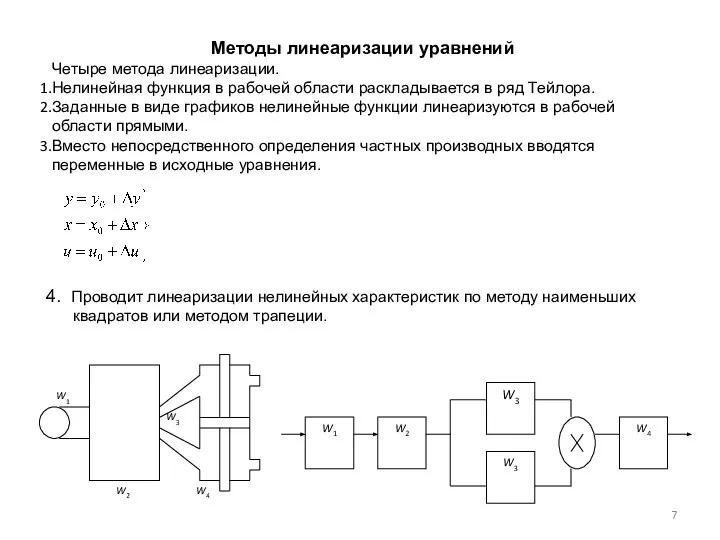
Методы линеаризации уравнений
Четыре метода линеаризации.
Нелинейная функция в рабочей области раскладывается в
Методы линеаризации уравнений
Четыре метода линеаризации.
Нелинейная функция в рабочей области раскладывается в
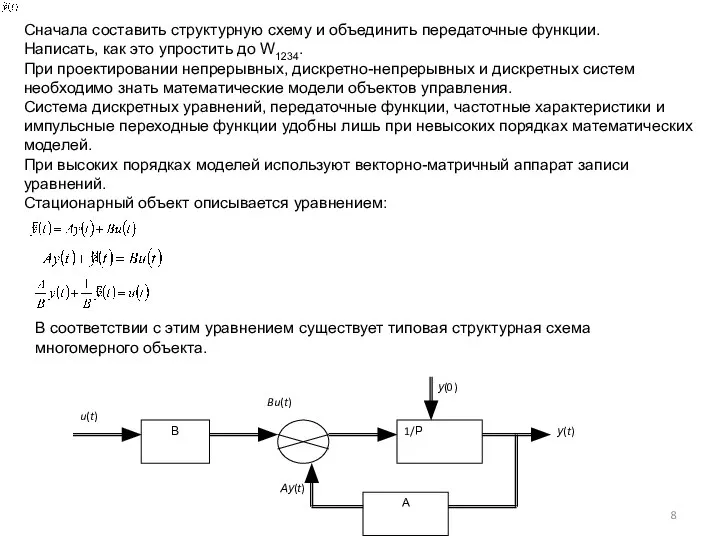
Сначала составить структурную схему и объединить передаточные функции.
Написать, как это упростить
Сначала составить структурную схему и объединить передаточные функции.
Написать, как это упростить
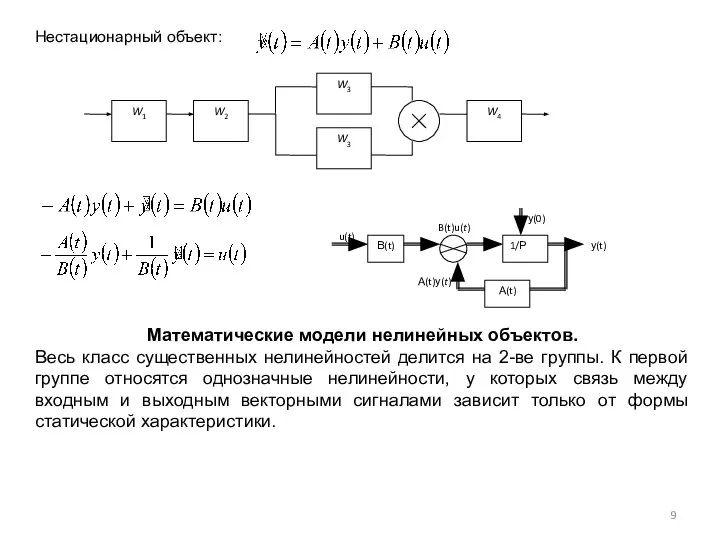
Нестационарный объект:
Математические модели нелинейных объектов.
Весь класс существенных нелинейностей делится на 2-ве
Нестационарный объект:
Математические модели нелинейных объектов.
Весь класс существенных нелинейностей делится на 2-ве
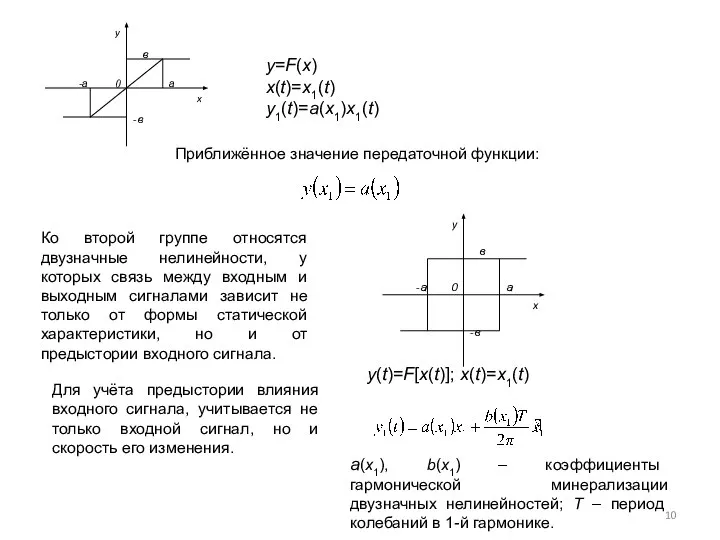
y=F(x)
x(t)=x1(t)
y1(t)=a(x1)x1(t)
Приближённое значение передаточной функции:
Ко второй группе относятся двузначные нелинейности, у
y=F(x)
x(t)=x1(t)
y1(t)=a(x1)x1(t)
Приближённое значение передаточной функции:
Ко второй группе относятся двузначные нелинейности, у
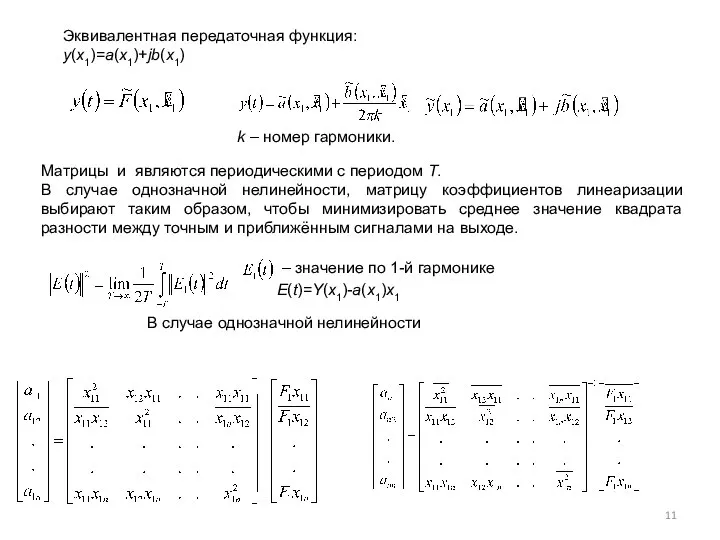
Эквивалентная передаточная функция:
y(x1)=a(x1)+jb(x1)
k – номер гармоники.
Матрицы и являются периодическими с периодом
Эквивалентная передаточная функция:
y(x1)=a(x1)+jb(x1)
k – номер гармоники.
Матрицы и являются периодическими с периодом
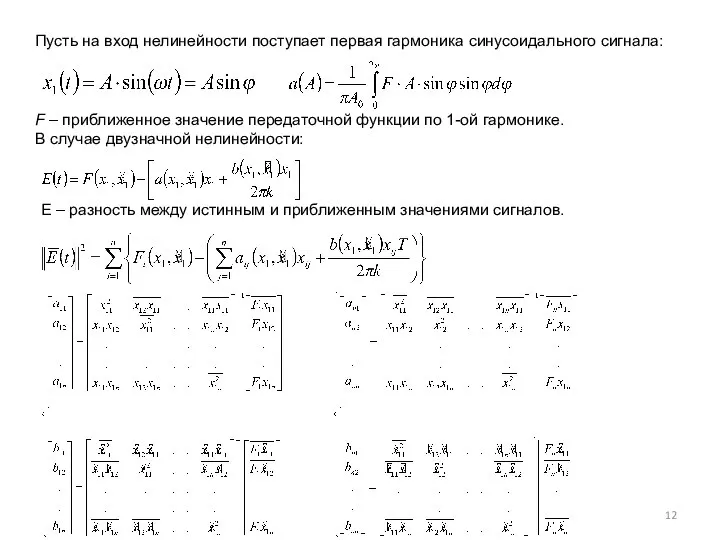
Пусть на вход нелинейности поступает первая гармоника синусоидального сигнала:
F – приближенное
Пусть на вход нелинейности поступает первая гармоника синусоидального сигнала:
F – приближенное
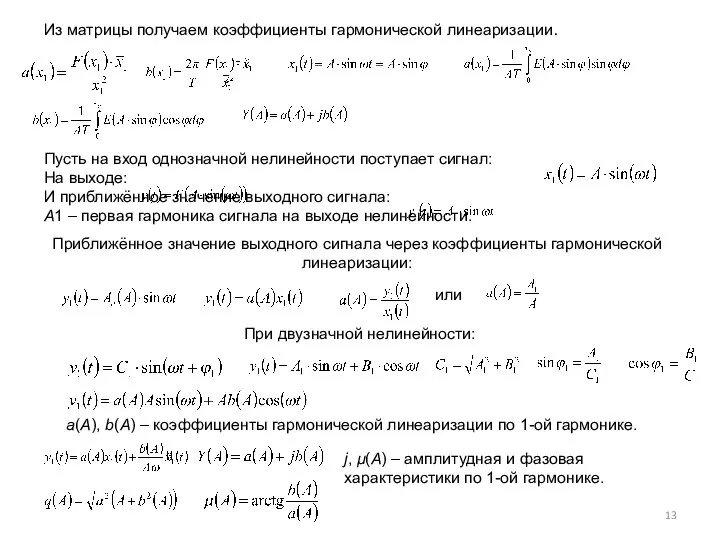
Из матрицы получаем коэффициенты гармонической линеаризации.
Пусть на вход однозначной нелинейности поступает
Из матрицы получаем коэффициенты гармонической линеаризации.
Пусть на вход однозначной нелинейности поступает
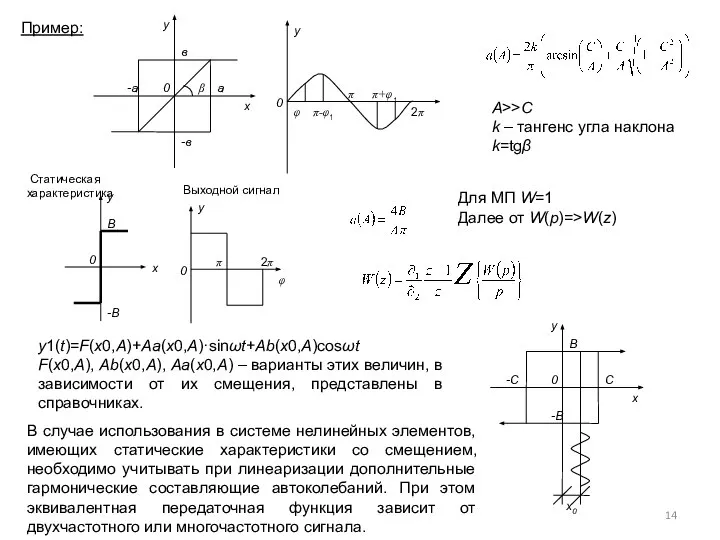
Пример:
А>>С
k – тангенс угла наклона
k=tgβ
Для МП W=1
Далее от W(p)=>W(z)
y1(t)=F(x0,A)+Aa(x0,A)·sinωt+Ab(x0,A)cosωt
F(x0,A), Ab(x0,A), Aa(x0,A)
Пример:
А>>С
k – тангенс угла наклона
k=tgβ
Для МП W=1
Далее от W(p)=>W(z)
y1(t)=F(x0,A)+Aa(x0,A)·sinωt+Ab(x0,A)cosωt
F(x0,A), Ab(x0,A), Aa(x0,A)
![Элементный синтез Кв - конвейер винтовой, Q [кг/с]; Р – редуктор,](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1290886/slide-14.jpg)
Элементный синтез
Кв - конвейер винтовой, Q [кг/с];
Р – редуктор, ω [рад/с];
Д
Элементный синтез
Кв - конвейер винтовой, Q [кг/с];
Р – редуктор, ω [рад/с];
Д
Выбор и обоснование каждого звена ЛСУ по предыдущим критериям
Из этих критериев
Выбор и обоснование каждого звена ЛСУ по предыдущим критериям
Из этих критериев
Статическая линеаризация существенных нелинейных элементов.
В системах автоматического регулирования в реальных условиях
Статическая линеаризация существенных нелинейных элементов.
В системах автоматического регулирования в реальных условиях
Совместная гармоническая и статическая линеаризация.
При поступлении на вход нелинейного элемента суммы
Совместная гармоническая и статическая линеаризация.
При поступлении на вход нелинейного элемента суммы
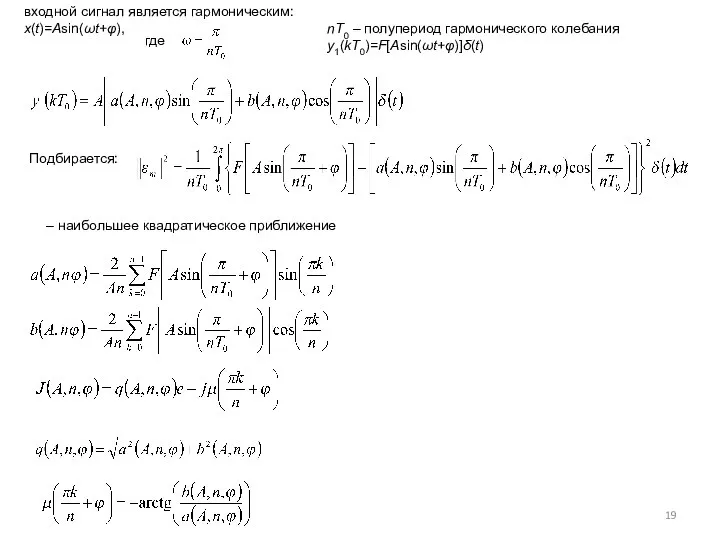
входной сигнал является гармоническим:
x(t)=Asin(ωt+φ),
где
nT0 – полупериод гармонического колебания
y1(kT0)=F[Asin(ωt+φ)]δ(t)
Подбирается:
– наибольшее квадратическое приближение
входной сигнал является гармоническим:
x(t)=Asin(ωt+φ),
где
nT0 – полупериод гармонического колебания
y1(kT0)=F[Asin(ωt+φ)]δ(t)
Подбирается:
– наибольшее квадратическое приближение
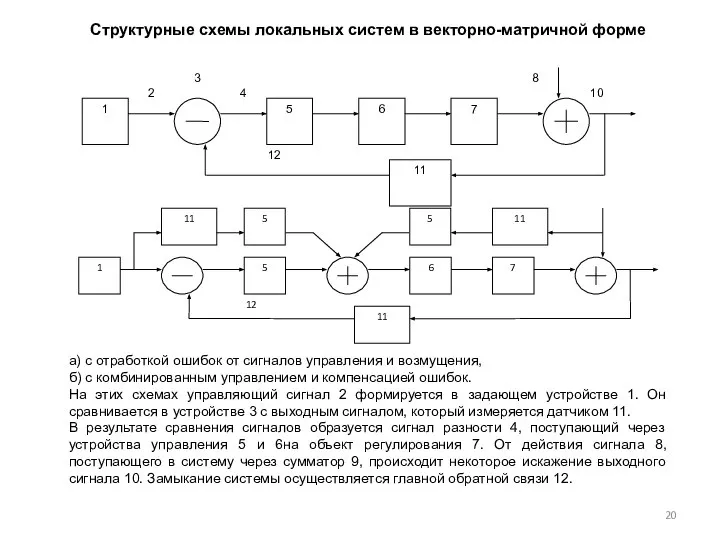
Структурные схемы локальных систем в векторно-матричной форме
а) с отработкой ошибок от
Структурные схемы локальных систем в векторно-матричной форме
а) с отработкой ошибок от
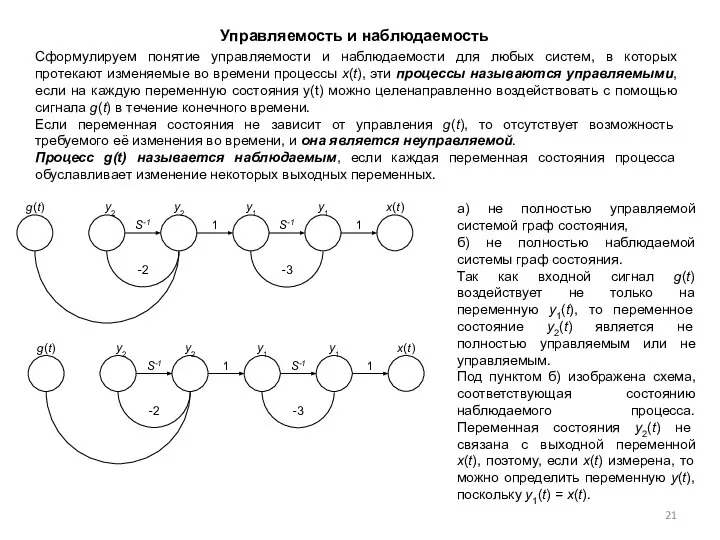
Управляемость и наблюдаемость
Сформулируем понятие управляемости и наблюдаемости для любых систем, в
Управляемость и наблюдаемость
Сформулируем понятие управляемости и наблюдаемости для любых систем, в
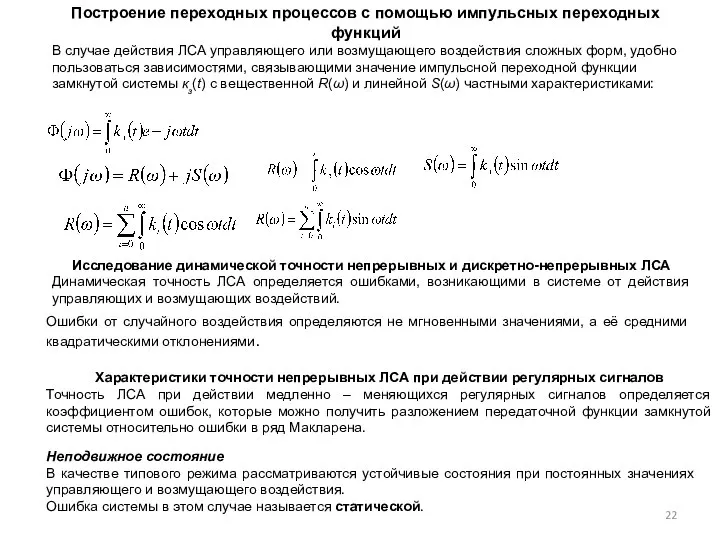
Построение переходных процессов с помощью импульсных переходных функций
В случае действия ЛСА
Построение переходных процессов с помощью импульсных переходных функций
В случае действия ЛСА
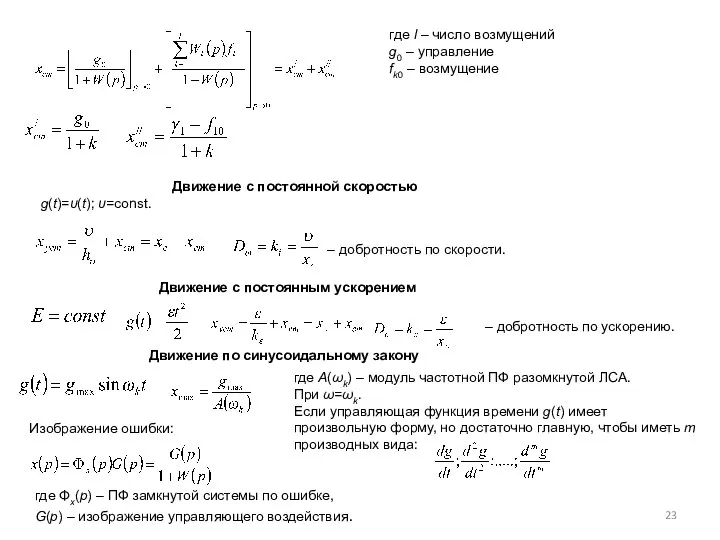
где l – число возмущений
g0 – управление
fk0 – возмущение
Движение с постоянной
где l – число возмущений
g0 – управление
fk0 – возмущение
Движение с постоянной
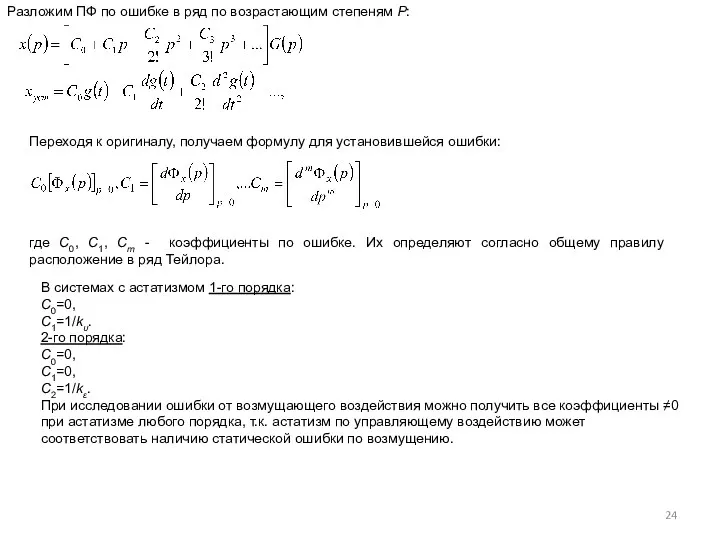
Разложим ПФ по ошибке в ряд по возрастающим степеням Р:
Переходя к
Разложим ПФ по ошибке в ряд по возрастающим степеням Р:
Переходя к
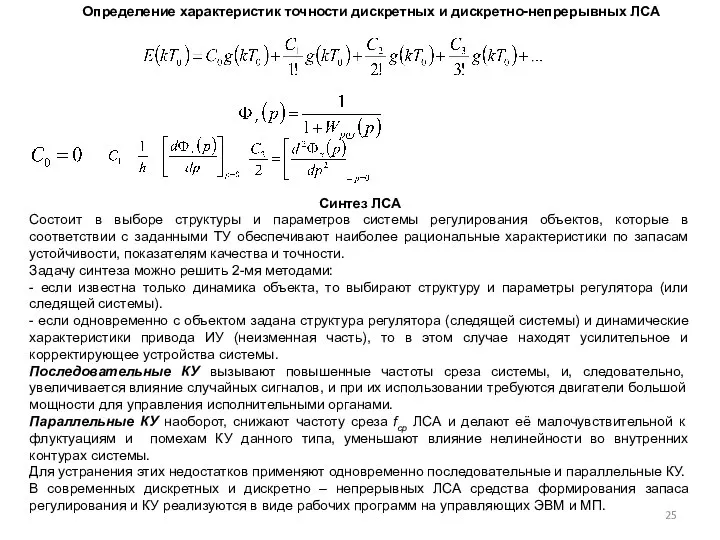
Определение характеристик точности дискретных и дискретно-непрерывных ЛСА
Синтез ЛСА
Состоит в выборе структуры
Определение характеристик точности дискретных и дискретно-непрерывных ЛСА
Синтез ЛСА
Состоит в выборе структуры
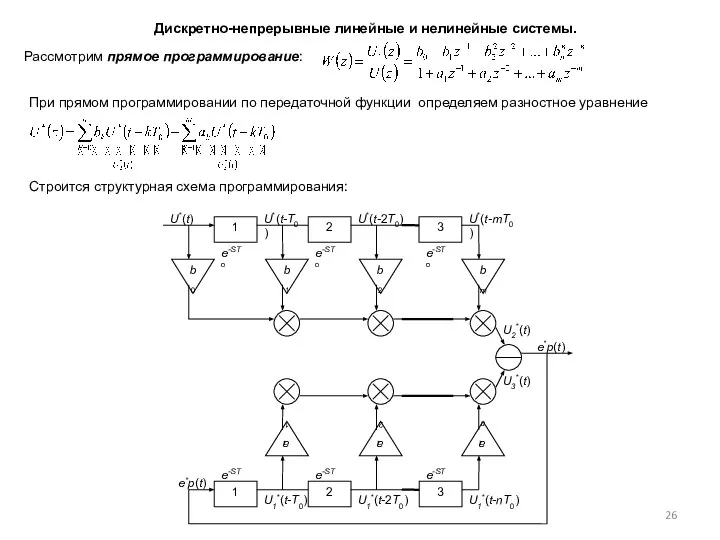
Дискретно-непрерывные линейные и нелинейные системы.
Рассмотрим прямое программирование:
При прямом программировании по передаточной
Дискретно-непрерывные линейные и нелинейные системы.
Рассмотрим прямое программирование:
При прямом программировании по передаточной
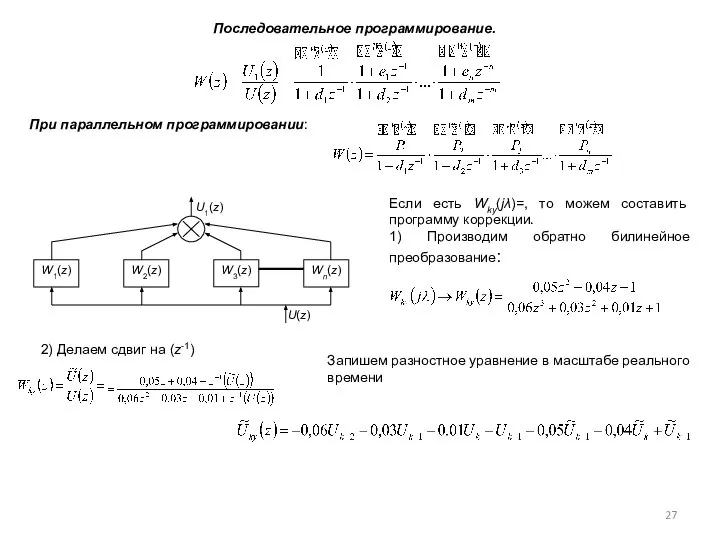
Последовательное программирование.
При параллельном программировании:
Если есть Wky(jλ)=, то можем составить программу коррекции.
1)
Последовательное программирование.
При параллельном программировании:
Если есть Wky(jλ)=, то можем составить программу коррекции.
1)
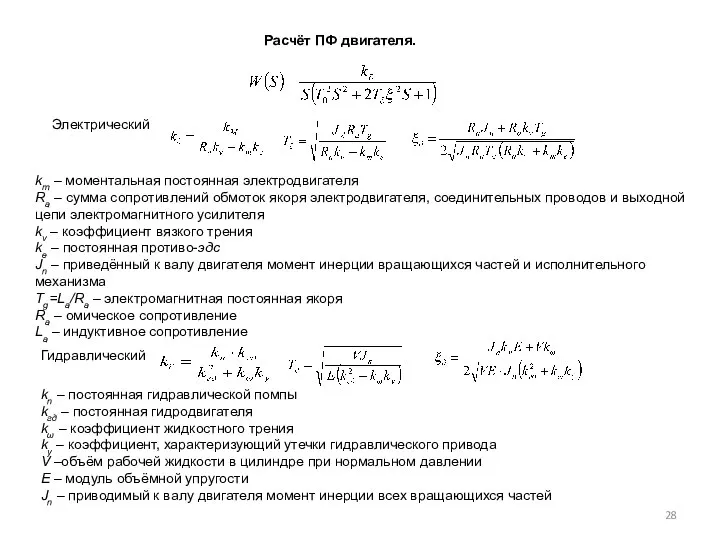
Расчёт ПФ двигателя.
Электрический
km – моментальная постоянная электродвигателя
Ra – сумма сопротивлений обмоток
Расчёт ПФ двигателя.
Электрический
km – моментальная постоянная электродвигателя
Ra – сумма сопротивлений обмоток
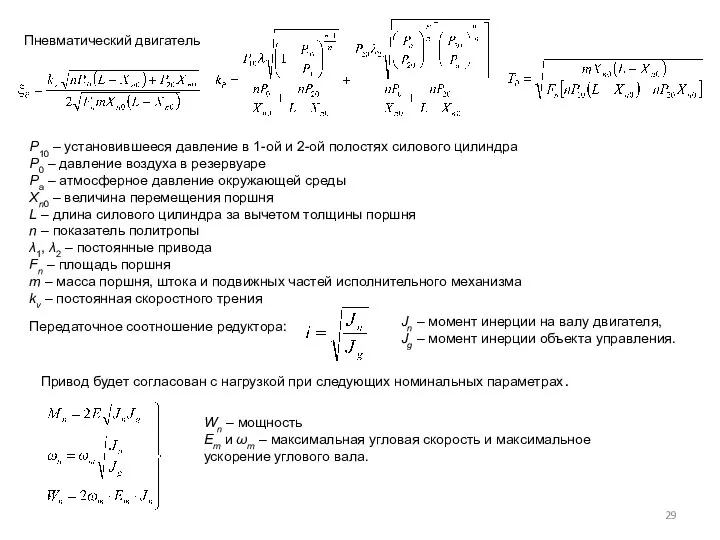
Пневматический двигатель
P10 – установившееся давление в 1-ой и 2-ой полостях силового
Пневматический двигатель
P10 – установившееся давление в 1-ой и 2-ой полостях силового
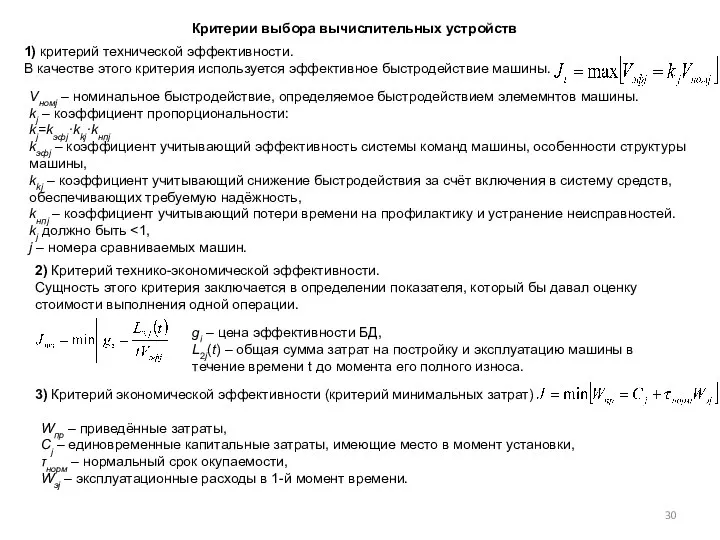
Критерии выбора вычислительных устройств
1) критерий технической эффективности.
В качестве этого критерия используется
Критерии выбора вычислительных устройств
1) критерий технической эффективности.
В качестве этого критерия используется
Адаптивные системы
1. Системы экстремального регулирования
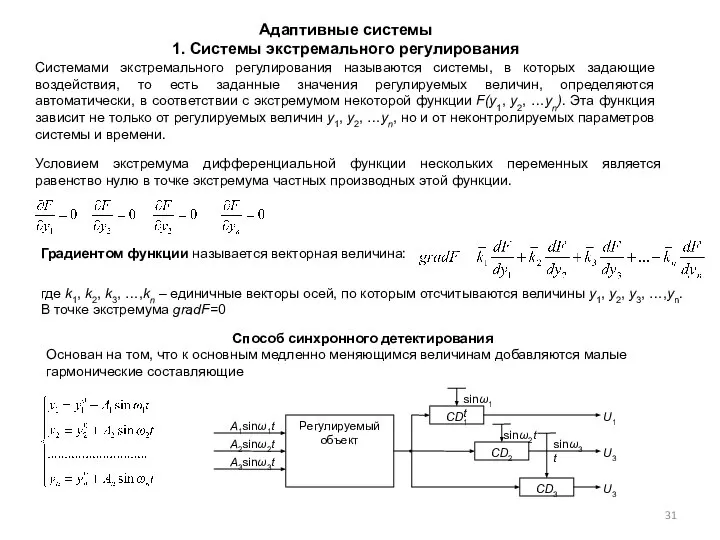
Системами экстремального регулирования называются системы, в которых
Адаптивные системы
1. Системы экстремального регулирования
Системами экстремального регулирования называются системы, в которых
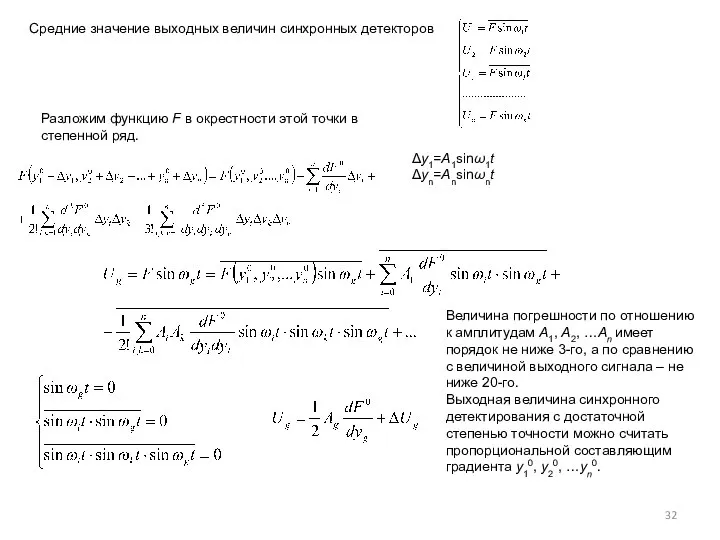
Средние значение выходных величин синхронных детекторов
Разложим функцию F в окрестности
Средние значение выходных величин синхронных детекторов
Разложим функцию F в окрестности
Способ производной по времени
Производная по функции времени определяется выражением:
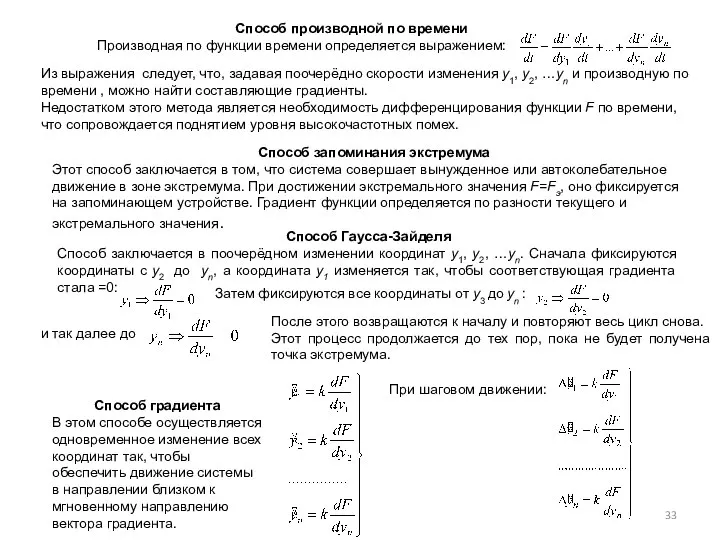
Из выражения следует,
Способ производной по времени
Производная по функции времени определяется выражением:
Из выражения следует,
Способ наискорейшего спуска
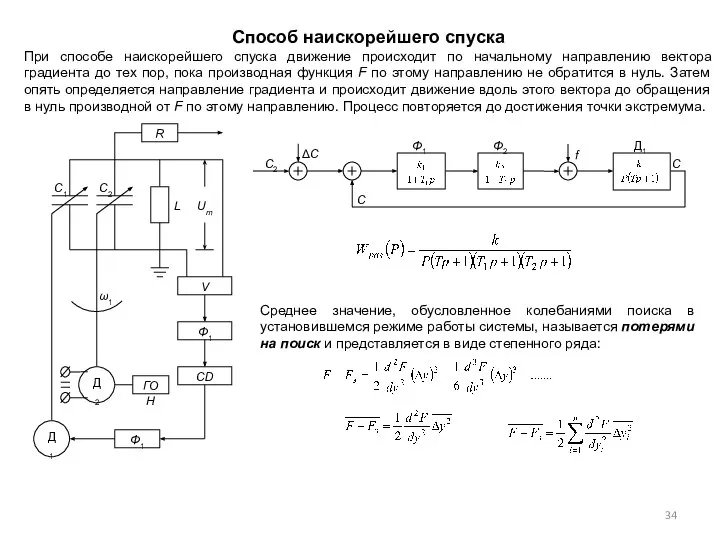
При способе наискорейшего спуска движение происходит по начальному направлению
Способ наискорейшего спуска
При способе наискорейшего спуска движение происходит по начальному направлению
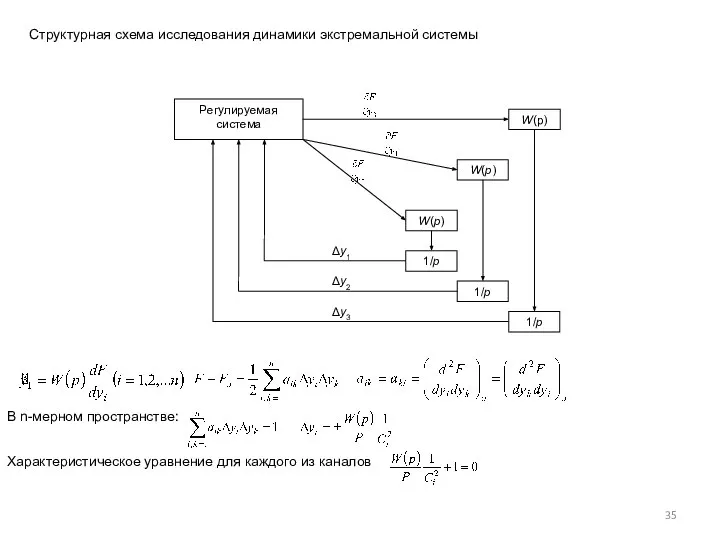
Структурная схема исследования динамики экстремальной системы
В n-мерном пространстве:
Характеристическое уравнение для каждого
Структурная схема исследования динамики экстремальной системы
В n-мерном пространстве:
Характеристическое уравнение для каждого
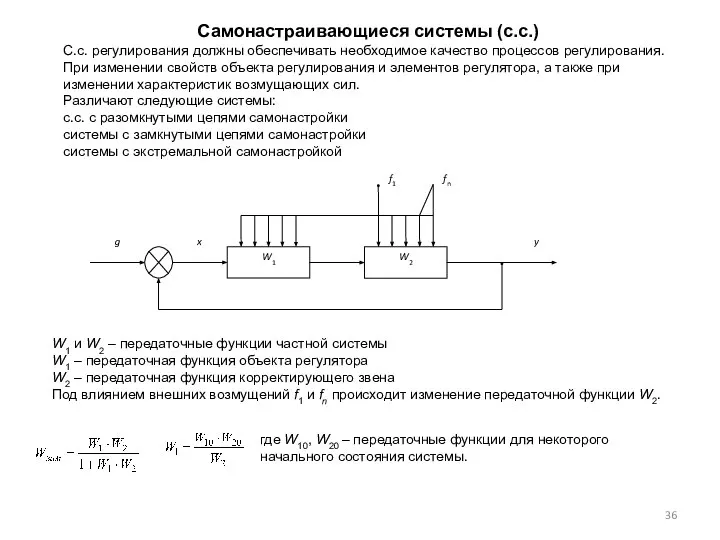
Самонастраивающиеся системы (с.с.)
С.с. регулирования должны обеспечивать необходимое качество процессов регулирования. При
Самонастраивающиеся системы (с.с.)
С.с. регулирования должны обеспечивать необходимое качество процессов регулирования. При
 Анализ современного урока В помощь учителю
Анализ современного урока В помощь учителю Художественная культура XIX столетия
Художественная культура XIX столетия Развитие государственных муниципальных закупок в системе управления экономикой страны
Развитие государственных муниципальных закупок в системе управления экономикой страны Статистика труда
Статистика труда  Технические каналы утечки информации на объектах информатизации Вооруженных Сил
Технические каналы утечки информации на объектах информатизации Вооруженных Сил Проектирование СТО автомобилей, с разработкой поста технического обслуживания и моделированием детали автомобиля
Проектирование СТО автомобилей, с разработкой поста технического обслуживания и моделированием детали автомобиля Системный подход к содержанию культуры
Системный подход к содержанию культуры Теория разработки рекламных объявлений
Теория разработки рекламных объявлений Презентация Поправка к цене контракта. Виды скидок во внешнеторговом контракте
Презентация Поправка к цене контракта. Виды скидок во внешнеторговом контракте  Богородице-Рождественский женский монастырь. Воскресная школа «Лучик»
Богородице-Рождественский женский монастырь. Воскресная школа «Лучик» «Молодёжные субкультуры»
«Молодёжные субкультуры» Экспортный контроль в системе управления ВЭД
Экспортный контроль в системе управления ВЭД Принтеры
Принтеры Биосфера с пз
Биосфера с пз Презентация Уравнения с параметрами
Презентация Уравнения с параметрами Презентация на тему "Анатомия и физиология как науки. Понятие об органе и системах органов. Организм в целом" - скачать презент
Презентация на тему "Анатомия и физиология как науки. Понятие об органе и системах органов. Организм в целом" - скачать презент Экспедиция «Мориа - 2018» КЧР
Экспедиция «Мориа - 2018» КЧР Основы программирования - Java ФИСТ 1 курс
Основы программирования - Java ФИСТ 1 курс Вимоги до диякона
Вимоги до диякона Государство 2
Государство 2 Разработка виртуального тренажера процесса пастеризации в среде Labview
Разработка виртуального тренажера процесса пастеризации в среде Labview Мать Тереза
Мать Тереза Коммуникация и общество
Коммуникация и общество Мясо Мангал. Игра, Миссия или Бизнес?
Мясо Мангал. Игра, Миссия или Бизнес? Конституционно-правовые основы правотворческих полномочий и виды подзаконных правовых актов органов государственной власти РФ
Конституционно-правовые основы правотворческих полномочий и виды подзаконных правовых актов органов государственной власти РФ Контроллер. Проектирование и разработка веб-сервисов
Контроллер. Проектирование и разработка веб-сервисов скелет
скелет Связь явлений Часть 2
Связь явлений Часть 2