- Операционные системы. Алгоритмы планирования процессов

Содержание
- 2. Алгоритмы планирования процессов Решение о том, кому дать следующий квант времени процессора определяет планирование. Планирование процессов
- 3. Классы планировщиков Пакетный Итерактивный Реального времени
- 4. Пакетный – ориентирован на длительные задачи, которые требуют больших вычислительных ресурсов, где не требуется частое прерывание.
- 5. Реального времени – специализированные класс, ориентированный на дедлайн – предельный срок завершения какой-либо работы. Главное, чтобы
- 6. Уровни планирования Долговременное(долгосрочное) – решает какие новые задачи будут добавлены (концептуальные вопросы). Среднесрочное – решает нужно
- 7. Цели планирования Справедливость Эффективность Сокращение полного времени выполнения (turnaround time) Сокращение времени ожидания (waiting time) Сокращение
- 8. Справедливость гарантировать каждому заданию или процессу определенную часть времени использования процессора в компьютерной системе, при этом
- 9. Эффективность постараться занять процессор на все 100% рабочего времени, не позволяя ему простаивать в ожидании процессов,
- 10. Сокращение полного времени выполнения (turnaround time) обеспечить минимальное время между стартом процесса или постановкой задания в
- 11. Сокращение времени ожидания ( waiting time ) сократить время, которое проводят процессы в состоянии готовность и
- 12. Сокращение времени отклика ( response time ) минимизировать время, которое требуется процессу в интерактивных системах для
- 13. Желаемые свойства алгоритмов планирования Предсказуемость Минимизация накладных расходов. Равномерность загрузки вычислительной системы. Масштабируемость.
- 14. Предсказуемость Одно и то же задание должно выполняться приблизительно за одно и то же время. Применение
- 15. Минимизация накладных расходов. Если на каждые 100 миллисекунд, выделенные процессу для использования процессора, будет приходиться 200
- 16. Равномерность загрузки вычислительной системы ОС обеспечивает доступ процессам ко всем ресурсам ВС, избегая по возможности ситуации
- 17. Масштабируемость способность системы, сети или процесса справляться с увеличением рабочей нагрузки (увеличивать свою производительность) при добавлении
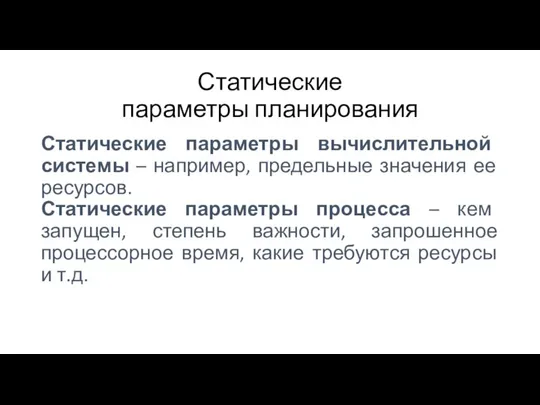
- 18. Статические параметры планирования Статические параметры вычислительной системы – например, предельные значения ее ресурсов. Статические параметры процесса
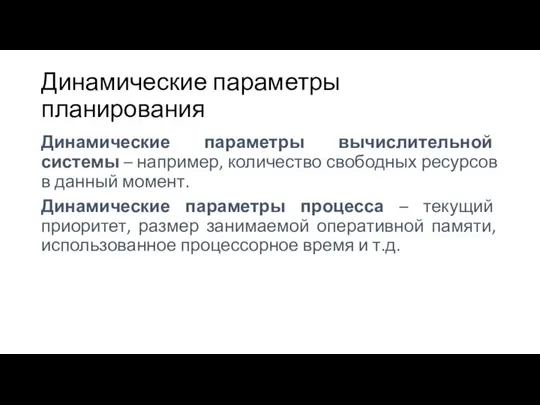
- 19. Динамические параметры планирования Динамические параметры вычислительной системы – например, количество свободных ресурсов в данный момент. Динамические
- 20. Алгоритмы планирования First-Come, First-Served (FCFS) Round Robin (RR) Shortest-Job-First (SJF) Гарантированное планирование Приоритетное планирование Многоуровневые очереди
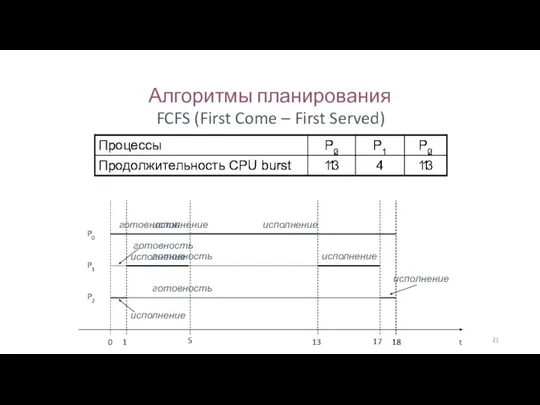
- 21. Алгоритмы планирования FCFS (First Come – First Served) t 18 17 13 0 P0 P1 P2
- 22. Алгоритмы планирования RR (Round Robin) Процесс 1 Процесс 2 Процесс 3 Процесс 4 готовность готовность готовность
- 23. Алгоритмы планирования Остаток времени CPU burst процесс освобождает процессор до истечения кванта; на исполнение выбираем новый
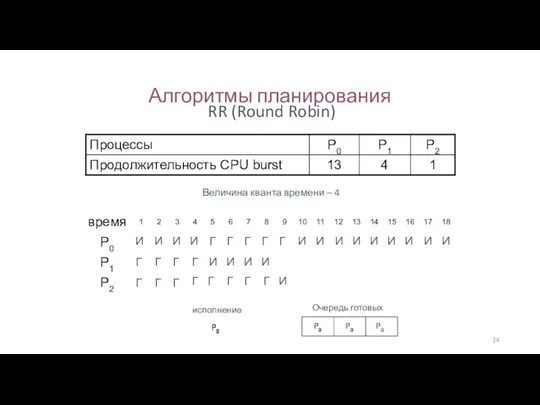
- 24. Алгоритмы планирования RR (Round Robin) Величина кванта времени – 4 И И И И Г Г
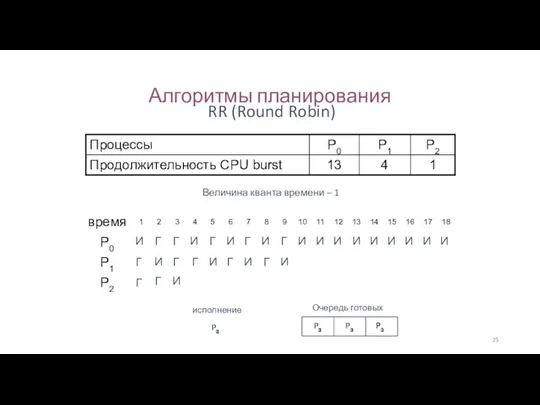
- 25. Алгоритмы планирования RR (Round Robin) Величина кванта времени – 1 И Г Г P0 P1 P2
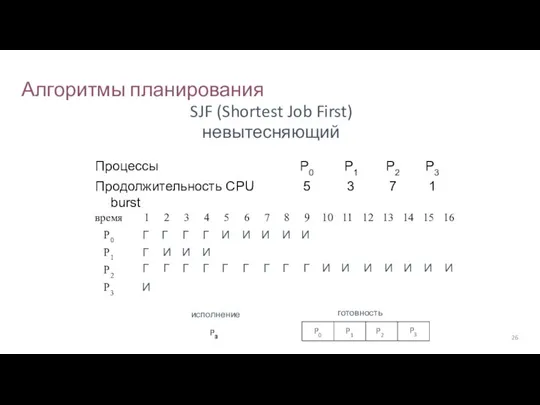
- 26. Алгоритмы планирования SJF (Shortest Job First) невытесняющий И Г Г Г И И И Г Г
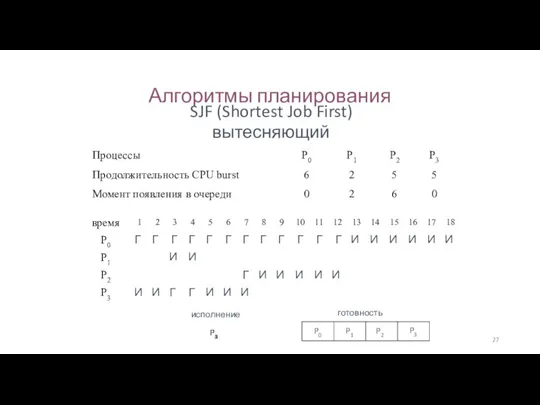
- 27. Алгоритмы планирования SJF (Shortest Job First) вытесняющий И Г P0 P1 P2 готовность P3 исполнение P3
- 28. Приоритетное планирование каждому процессу присваивается определенное числовое значение – приоритет, в соответствии с которым ему выделяется
- 30. Скачать презентацию
Алгоритмы планирования процессов
Решение о том, кому дать следующий квант времени процессора
Алгоритмы планирования процессов
Решение о том, кому дать следующий квант времени процессора
Классы планировщиков
Пакетный
Итерактивный
Реального времени
Классы планировщиков
Пакетный
Итерактивный
Реального времени
Пакетный – ориентирован на длительные задачи, которые требуют больших вычислительных ресурсов,
Пакетный – ориентирован на длительные задачи, которые требуют больших вычислительных ресурсов,
Реального времени – специализированные класс, ориентированный на дедлайн – предельный срок
Реального времени – специализированные класс, ориентированный на дедлайн – предельный срок
Уровни планирования
Долговременное(долгосрочное) – решает какие новые задачи будут добавлены (концептуальные
Уровни планирования
Долговременное(долгосрочное) – решает какие новые задачи будут добавлены (концептуальные
Цели планирования
Справедливость
Эффективность
Сокращение полного времени выполнения (turnaround time)
Сокращение времени ожидания (waiting
Цели планирования
Справедливость
Эффективность
Сокращение полного времени выполнения (turnaround time)
Сокращение времени ожидания (waiting
Справедливость
гарантировать каждому заданию или процессу определенную часть времени использования процессора в
Справедливость
гарантировать каждому заданию или процессу определенную часть времени использования процессора в
Эффективность
постараться занять процессор на все 100% рабочего времени, не позволяя ему
Эффективность
постараться занять процессор на все 100% рабочего времени, не позволяя ему
Сокращение полного времени выполнения (turnaround time)
обеспечить минимальное время между стартом процесса
Сокращение полного времени выполнения (turnaround time)
обеспечить минимальное время между стартом процесса
Сокращение времени ожидания
( waiting time )
сократить время, которое проводят процессы в состоянии
Сокращение времени ожидания
( waiting time )
сократить время, которое проводят процессы в состоянии
Сокращение времени отклика
( response time )
минимизировать время, которое требуется процессу в интерактивных
Сокращение времени отклика
( response time )
минимизировать время, которое требуется процессу в интерактивных
Желаемые свойства алгоритмов планирования
Предсказуемость
Минимизация накладных расходов.
Равномерность загрузки вычислительной системы.
Масштабируемость.
Желаемые свойства алгоритмов планирования
Предсказуемость
Минимизация накладных расходов.
Равномерность загрузки вычислительной системы.
Масштабируемость.
Предсказуемость
Одно и то же задание должно выполняться приблизительно за одно и
Предсказуемость
Одно и то же задание должно выполняться приблизительно за одно и
Минимизация накладных расходов.
Если на каждые 100 миллисекунд, выделенные процессу для
Минимизация накладных расходов.
Если на каждые 100 миллисекунд, выделенные процессу для
Равномерность загрузки вычислительной системы
ОС обеспечивает доступ процессам ко всем ресурсам ВС,
Равномерность загрузки вычислительной системы
ОС обеспечивает доступ процессам ко всем ресурсам ВС,
Масштабируемость
способность системы, сети или процесса справляться с увеличением рабочей нагрузки (увеличивать
Масштабируемость
способность системы, сети или процесса справляться с увеличением рабочей нагрузки (увеличивать
Статические
параметры планирования
Статические параметры вычислительной системы – например, предельные значения ее ресурсов.
Статические
Статические
параметры планирования
Статические параметры вычислительной системы – например, предельные значения ее ресурсов.
Статические
Динамические параметры планирования
Динамические параметры вычислительной системы – например, количество свободных ресурсов
Динамические параметры планирования
Динамические параметры вычислительной системы – например, количество свободных ресурсов
Алгоритмы планирования
First-Come, First-Served (FCFS)
Round Robin (RR)
Shortest-Job-First (SJF)
Гарантированное планирование
Приоритетное планирование
Многоуровневые очереди (Multilevel
Алгоритмы планирования
First-Come, First-Served (FCFS)
Round Robin (RR)
Shortest-Job-First (SJF)
Гарантированное планирование
Приоритетное планирование
Многоуровневые очереди (Multilevel
Алгоритмы планирования
FCFS (First Come – First Served)
t
18
17
13
0
P0
P1
P2
исполнение
готовность
готовность
исполнение
исполнение
исполнение
готовность
готовность
1
исполнение
5
исполнение
18
Алгоритмы планирования
FCFS (First Come – First Served)
t
18
17
13
0
P0
P1
P2
исполнение
готовность
готовность
исполнение
исполнение
исполнение
готовность
готовность
1
исполнение
5
исполнение
18

Алгоритмы планирования
RR (Round Robin)
Процесс 1
Процесс 2
Процесс 3
Процесс 4
готовность
готовность
готовность
исполнение
Процессор
Процесс 3
Процесс 3
Процесс 4
исполнение
готовность
готовность
готовность
Процесс
Алгоритмы планирования
RR (Round Robin)
Процесс 1
Процесс 2
Процесс 3
Процесс 4
готовность
готовность
готовность
исполнение
Процессор
Процесс 3
Процесс 3
Процесс 4
исполнение
готовность
готовность
готовность
Процесс
Алгоритмы планирования
Остаток времени CPU burst <= кванта времени:
процесс освобождает процессор до
Алгоритмы планирования
Остаток времени CPU burst <= кванта времени:
процесс освобождает процессор до
Алгоритмы планирования
RR (Round Robin)
Величина кванта времени – 4
И
И
И
И
Г
Г
Г
Г
Г
Г
Г
Г
P0
P1
P2
Очередь готовых
P0
исполнение
P1
P2
P0
P1
P2
P0
И
И
И
И
Г
Г
Г
Г
Г
Г
Г
Г
P2
P0
И
Г
P0
И
И
И
И
И
И
И
И
И
Алгоритмы планирования
RR (Round Robin)
Величина кванта времени – 4
И
И
И
И
Г
Г
Г
Г
Г
Г
Г
Г
P0
P1
P2
Очередь готовых
P0
исполнение
P1
P2
P0
P1
P2
P0
И
И
И
И
Г
Г
Г
Г
Г
Г
Г
Г
P2
P0
И
Г
P0
И
И
И
И
И
И
И
И
И
Алгоритмы планирования
RR (Round Robin)
Величина кванта времени – 1
И
Г
Г
P0
P1
P2
Очередь готовых
P0
исполнение
P1
P2
P0
P2
P0
P0
P1
И
Г
Г
P1
P2
P1
И
Г
Г
P0
P1
И
Г
P1
И
Г
И
Г
И
Г
И
Г
И
Г
И
И
И
И
И
И
И
И
И
Алгоритмы планирования
RR (Round Robin)
Величина кванта времени – 1
И
Г
Г
P0
P1
P2
Очередь готовых
P0
исполнение
P1
P2
P0
P2
P0
P0
P1
И
Г
Г
P1
P2
P1
И
Г
Г
P0
P1
И
Г
P1
И
Г
И
Г
И
Г
И
Г
И
Г
И
И
И
И
И
И
И
И
И
Алгоритмы планирования
SJF (Shortest Job First)
невытесняющий
И
Г
Г
Г
И
И
И
Г
Г
Г
Г
Г
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
И
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Алгоритмы планирования
SJF (Shortest Job First)
невытесняющий
И
Г
Г
Г
И
И
И
Г
Г
Г
Г
Г
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
И
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Алгоритмы планирования
SJF (Shortest Job First)
вытесняющий
И
Г
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Г
И
И
И
Г
Г
Г
Г
И
И
Г
Г
И
Г
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
Алгоритмы планирования
SJF (Shortest Job First)
вытесняющий
И
Г
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Г
И
И
И
Г
Г
Г
Г
И
И
Г
Г
И
Г
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
Приоритетное планирование
каждому процессу присваивается определенное числовое значение – приоритет, в соответствии
Приоритетное планирование
каждому процессу присваивается определенное числовое значение – приоритет, в соответствии
 Нововведения Java5 Часть 2
Нововведения Java5 Часть 2 Шифрування даних на мікропроцесорах за допомогою мови програмування Java
Шифрування даних на мікропроцесорах за допомогою мови програмування Java Метод параметрической диагностики
Метод параметрической диагностики Формирование универсальных учебных действий
Формирование универсальных учебных действий HTML_3-2
HTML_3-2  Анаэробные возможности спортсмена. Тестирование анаэробной мощности и емкости
Анаэробные возможности спортсмена. Тестирование анаэробной мощности и емкости ОСОБЕННОСТИ РУССКОГО МЕРКАНТИЛИЗМА К XVIII веку Россия окончательно утвердилась как единое государство: сформировался единый ры
ОСОБЕННОСТИ РУССКОГО МЕРКАНТИЛИЗМА К XVIII веку Россия окончательно утвердилась как единое государство: сформировался единый ры Амниотическая эмболия
Амниотическая эмболия Сезонно-промерзающие грунты в условиях г. Нур-Султан(Астана)
Сезонно-промерзающие грунты в условиях г. Нур-Султан(Астана) Посредничество в конфликте
Посредничество в конфликте мой вятский край - презентация для начальной школы
мой вятский край - презентация для начальной школы Языковые нормы официально-делового стиля
Языковые нормы официально-делового стиля Теоретические основы электротехники (практика 1)
Теоретические основы электротехники (практика 1) СУДЕБНО-МЕДИЦИНСКАЯ ЭКСПЕРТИЗА ТРУПОВ НОВОРОЖДЕННЫХ
СУДЕБНО-МЕДИЦИНСКАЯ ЭКСПЕРТИЗА ТРУПОВ НОВОРОЖДЕННЫХ VРА-communication
VРА-communication Футбольный стадион «67». Бизнес-план
Футбольный стадион «67». Бизнес-план HTML Язык описания Web-страниц
HTML Язык описания Web-страниц Школы искусства и дизайна в США Университеты Западного Побережья штаты Вашингон, Орегон, Невада, Калифорния
Школы искусства и дизайна в США Университеты Западного Побережья штаты Вашингон, Орегон, Невада, Калифорния Дисциплина профессионального цикла для студентов, обучающихся по магистерским программам
Дисциплина профессионального цикла для студентов, обучающихся по магистерским программам  Прямая на плоскости
Прямая на плоскости Наборы тяжелый2
Наборы тяжелый2 Откровение вечной картины
Откровение вечной картины Управление стоимостью проекта
Управление стоимостью проекта Конституционные основы компетенции органов власти субъектов Российской Федерации в сфере правотворчества
Конституционные основы компетенции органов власти субъектов Российской Федерации в сфере правотворчества Федеральный закон «Об основах охраны здоровья граждан в РФ» от 21.11.2011 № 323-ФЗ
Федеральный закон «Об основах охраны здоровья граждан в РФ» от 21.11.2011 № 323-ФЗ Богоматерь Владимирская. Первая треть XII в
Богоматерь Владимирская. Первая треть XII в Отдел по эксплуатации электросетей Ишимбая и Салавата
Отдел по эксплуатации электросетей Ишимбая и Салавата Торговый объект. 2 этажа. Под реконструкцию
Торговый объект. 2 этажа. Под реконструкцию