Основные (обязательные) требования Их нарушение делает невозможным использование по назначению разработанных программных средст
- Основные (обязательные) требования Их нарушение делает невозможным использование по назначению разработанных программных средст

Содержание
- 2. 1. Функциональная полнота – обеспечение программной реализации всех требуемых функций 2. Высокая производительность – ПО должно
- 3. 3. Высокая надежность при минимальных эксплуатационных затратах. С учетом возможных программных ошибок должно обеспечиваться общее требование
- 4. 1. Минимальная стоимость хранения программ и данных Обеспечивается организацией многоуровневой виртуальной памяти 2. Открытость и гибкость
- 5. Выдержки из учебника Терехова А.Н. «Технологии программирования» (2006) Часть II. Технология программирования встроенных систем реального времени
- 6. Типичными примерами встроенных систем являются телефонные станции, системы вооружения, роботы, медицинское оборудование и т.д. Многие специалисты
- 7. 2. Реактивность ПО, т.е. способность всегда укладываться в заданные временные рамки. Отсюда вытекает необходимость тщательного анализа
- 8. Кроме того, требуются дополнительные программные средства для поддержки специального языка взаимодействия «человек-машина» (Man-Machine Language – MML).
- 9. Выдержки из диссертации Б. Деккера (фирма Ericsson, 2000) Требования к технологиям программирования для систем автоматической коммутации
- 10. 5. Очень большой объем программных средств. 6. Сложная функциональность ПО при многообразии взаимодействующих элементов. 7. Непрерывная
- 11. 1. Принцип модульности Все ПО разбивается на отдельные части, которые называют модулями. Модули должны быть: небольшими
- 12. программные модули – обеспечивают обработку данных; информационные модули – содержат данные, которые подлежат обработке. Существуют различные
- 13. Текущее состояние объекта характеризуется некоторыми данными, а его функциональные возможности реализуются с помощью методов (процедур). ОБЪЕКТ
- 14. Ускорение сроков разработки за счет организации параллельной работы с отдельными частями ПО Минимизация стоимости разработки, т.к.
- 15. Этот принцип затрагивает только взаимодействие между отдельными программными модулями (ПМ). При одноуровневом построении (peer-to-peer – Р2Р)
- 16. 1. Любой модуль может быть запущен только другим модулем предшествующего УИ. 2. После выполнения требуемых функций
- 17. С учетом срочности обработки информации и важности выполняемых функций формируются приоритетные уровни (ПУ), а затем программные
- 19. Скачать презентацию
1. Функциональная полнота – обеспечение программной реализации всех требуемых функций
2. Высокая
1. Функциональная полнота – обеспечение программной реализации всех требуемых функций
2. Высокая
3. Высокая надежность при минимальных эксплуатационных затратах.
С учетом возможных программных ошибок
3. Высокая надежность при минимальных эксплуатационных затратах.
С учетом возможных программных ошибок
1. Минимальная стоимость хранения программ и данных
Обеспечивается организацией многоуровневой виртуальной памяти
2.
1. Минимальная стоимость хранения программ и данных
Обеспечивается организацией многоуровневой виртуальной памяти
2.
Выдержки из учебника Терехова А.Н. «Технологии программирования» (2006)
Часть II. Технология программирования
Выдержки из учебника Терехова А.Н. «Технологии программирования» (2006)
Часть II. Технология программирования
Типичными примерами встроенных систем являются телефонные станции, системы вооружения, роботы, медицинское
Типичными примерами встроенных систем являются телефонные станции, системы вооружения, роботы, медицинское
2. Реактивность ПО, т.е. способность всегда укладываться в заданные временные рамки.
Отсюда
2. Реактивность ПО, т.е. способность всегда укладываться в заданные временные рамки.
Отсюда
Кроме того, требуются дополнительные программные средства для поддержки специального языка взаимодействия
Кроме того, требуются дополнительные программные средства для поддержки специального языка взаимодействия
Выдержки из диссертации Б. Деккера (фирма Ericsson, 2000)
Требования к технологиям программирования
Выдержки из диссертации Б. Деккера (фирма Ericsson, 2000)
Требования к технологиям программирования
5. Очень большой объем программных средств.
6. Сложная функциональность ПО при многообразии
5. Очень большой объем программных средств.
6. Сложная функциональность ПО при многообразии
1. Принцип модульности
Все ПО разбивается на отдельные части, которые называют модулями.
Модули
1. Принцип модульности
Все ПО разбивается на отдельные части, которые называют модулями.
Модули
программные модули – обеспечивают обработку данных;
информационные модули – содержат данные, которые
программные модули – обеспечивают обработку данных;
информационные модули – содержат данные, которые
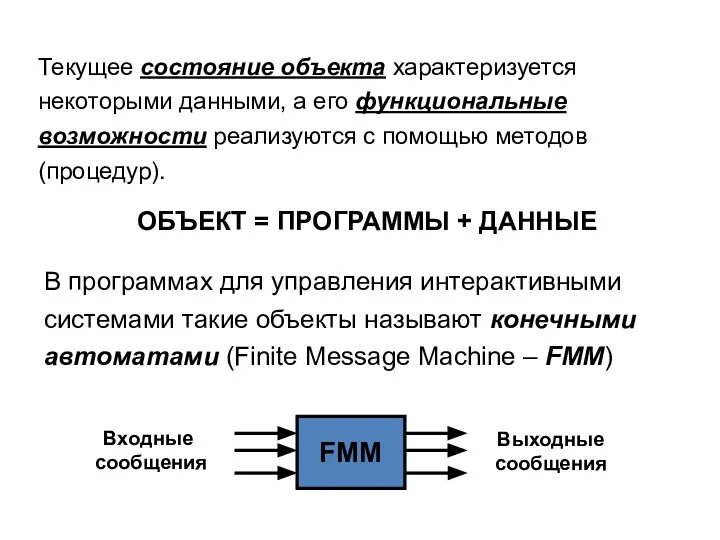
Текущее состояние объекта характеризуется некоторыми данными, а его функциональные возможности реализуются
Текущее состояние объекта характеризуется некоторыми данными, а его функциональные возможности реализуются
Ускорение сроков разработки за счет организации параллельной работы с отдельными частями
Ускорение сроков разработки за счет организации параллельной работы с отдельными частями
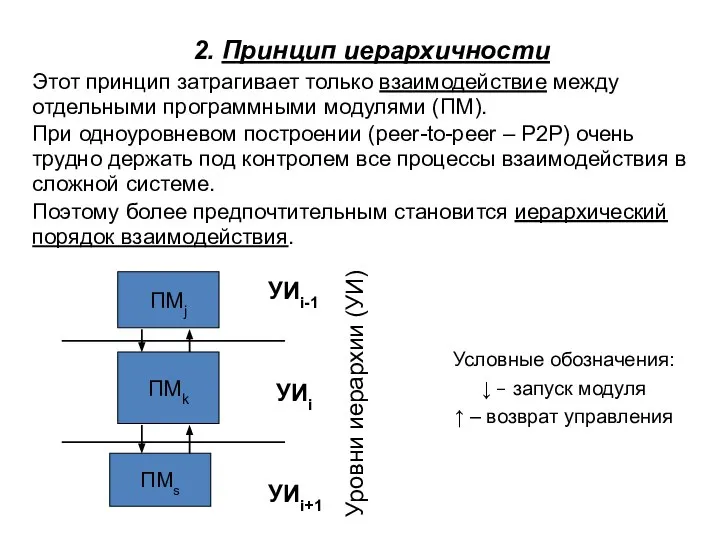
Этот принцип затрагивает только взаимодействие между отдельными программными модулями (ПМ).
При одноуровневом
Этот принцип затрагивает только взаимодействие между отдельными программными модулями (ПМ).
При одноуровневом
1. Любой модуль может быть запущен только другим модулем предшествующего УИ.
2.
1. Любой модуль может быть запущен только другим модулем предшествующего УИ.
2.
С учетом срочности обработки информации и важности выполняемых функций формируются приоритетные
С учетом срочности обработки информации и важности выполняемых функций формируются приоритетные
 Принцип работы однофазного счетчика электроэнергии
Принцип работы однофазного счетчика электроэнергии Московский политехнический университет
Московский политехнический университет Санитарно-эпидемиологическое нормирование
Санитарно-эпидемиологическое нормирование Машинный язык и язык высокого уровня
Машинный язык и язык высокого уровня Использование информационно-коммуникационных технологий в радиоаппаратостроении
Использование информационно-коммуникационных технологий в радиоаппаратостроении МАСТЕР-КЛАСС КАК ФОРМА ПОВЫШЕНИЯ КВАЛИФИКАЦИИ И ОБОБЩЕНИЯ ПЕДАГОГИЧЕСКОГО ОПЫТА Лучше один раз увидеть, чем сто раз услышать.
МАСТЕР-КЛАСС КАК ФОРМА ПОВЫШЕНИЯ КВАЛИФИКАЦИИ И ОБОБЩЕНИЯ ПЕДАГОГИЧЕСКОГО ОПЫТА Лучше один раз увидеть, чем сто раз услышать.  Страна восходящего солнца
Страна восходящего солнца Просто о предпринимательстве. Эволюция предпринимательской деятельности
Просто о предпринимательстве. Эволюция предпринимательской деятельности Проблемы празднования Евхаристии. Трапеза Господня и трапеза идольская
Проблемы празднования Евхаристии. Трапеза Господня и трапеза идольская Технология технического обслуживанию и ремонта коробки передач ЗИЛ-130
Технология технического обслуживанию и ремонта коробки передач ЗИЛ-130 Информационный повод
Информационный повод  Постлиберальный поворот в политике Пост-Запада: анализ Мюнхенского доклада 2017 года
Постлиберальный поворот в политике Пост-Запада: анализ Мюнхенского доклада 2017 года Дмитрий Кокарев - Российский спортсмен, мастер спорта России по плаванию
Дмитрий Кокарев - Российский спортсмен, мастер спорта России по плаванию Омская Государственная Медицинская Академия Кафедра Факультетской Хирургии с курсом Урологии Тема: Хирургия молочной железы
Омская Государственная Медицинская Академия Кафедра Факультетской Хирургии с курсом Урологии Тема: Хирургия молочной железы  Традиционно шведский дизайн
Традиционно шведский дизайн Презен 12
Презен 12 Агитационное искусство периода Первой мировой войны Материалы к уроку 11 класс
Агитационное искусство периода Первой мировой войны Материалы к уроку 11 класс Основные признаки предприятия в строительстве. Формы и виды строительно-монтажных организаций
Основные признаки предприятия в строительстве. Формы и виды строительно-монтажных организаций Презентация "Социально-когнитивное направление в теории личности (Д. Роттер)" - скачать презентации по Экономике
Презентация "Социально-когнитивное направление в теории личности (Д. Роттер)" - скачать презентации по Экономике сущность ипотечного жилищного кредитования
сущность ипотечного жилищного кредитования Презентация ПРОБЛЕМЫ УРЕГУЛИРОВАНИЯ ВНЕШНЕЙ ЗАДОЛЖЕННОСТИ ГОСУДАРСТВА: МИРОВОЙ ОПЫТ И РОССИЙСКАЯ ПРАКТИКА
Презентация ПРОБЛЕМЫ УРЕГУЛИРОВАНИЯ ВНЕШНЕЙ ЗАДОЛЖЕННОСТИ ГОСУДАРСТВА: МИРОВОЙ ОПЫТ И РОССИЙСКАЯ ПРАКТИКА Фундаменты для экодомов
Фундаменты для экодомов Tiere. Haustier
Tiere. Haustier Амины
Амины Основы интернет маркетинга
Основы интернет маркетинга Структура денежно-кредитной системы
Структура денежно-кредитной системы Тема: Понятие корня n – й степени из действительного числа Знать, уметь: «3» - иметь представление что такое степень с рациональным
Тема: Понятие корня n – й степени из действительного числа Знать, уметь: «3» - иметь представление что такое степень с рациональным Железобетонные конструкции
Железобетонные конструкции