- Параллельный и последовательный порты

Содержание
- 2. Схема контроллера параллельного порта i8255A. Устройство управления Буфер управления Внешнее устройство Системная шина Внутренняя шина данных
- 3. Сигналы Centronics имеют следующее назначение: D0...D7 — 8-разрядная шина данных для передачи из компьютера в принтер.
- 4. Формирование и прием сигналов интерфейса Centronics производится путем записи и чтения выделенных для него портов ввода/вывода.
- 5. Последовательный порт (Интерфейс RS232C). Интерфейс RS-232C предназначен для подключения к компьютеру стандартных внешних устройств (принтера, сканера,
- 6. Схема контроллера последовательного порта i8250. Устройство управления Буфер 1 управления Внешнее устройство Системная шина Буфер данных
- 7. Назначение сигналов обращений: FG — защитное заземление (экран). -TxD — данные, передаваемые компьютером в последовательном коде.
- 8. Конкретные форматы обращений по этим портам можно найти в описаниях микросхем контроллеров последовательного обмена UART (Universal
- 9. 29.Подсистема ввода-вывода. Назначение, структура и задачи BIOS. BIOS (Basic Input Output System) – часть программного обеспечения
- 10. Структура подсистемы POST. Состояние процессора после включения питания предопределено – EFLAGS = 00000002h; EIP = 0000FFF0h;
- 11. Основные функции подсистемы POST. Процедуры POST служат для пуска самотестирования устройств на системной плате, сравнения их
- 12. Доступ к переменным и константам BIOS. Осуществляется через меню SETUP BIOS, доступное в начальные моменты загрузки
- 13. Карта ввода / вывода. 0000 – 00FF – 256 8-разрядных портов предназначены для устройств, расположенных на
- 14. Функции BIOS при работе с портами Для прямого обращения ЦПУ к портам ввода/вывода в системе команд
- 15. 30. Система Plug & Play автоопределения устройств ПЭВМ. Основные принципы построения системы PnP были сформулированы и
- 16. Современная система PnP состоит из следующих компонентов: 1. BIOS стандарта PnP. Уведомления – сообщение пользователю об
- 17. Подсистема ввода/вывода ПЭВМ и ядро OS решает следующие задачи: 1. Реализация вычислительной системы переменной конфигурации. 2.
- 18. 6. Арбитр ресурсов (служба OS PnP). Основные функции: - Обновление реестра, помещая туда новейшую информацию о
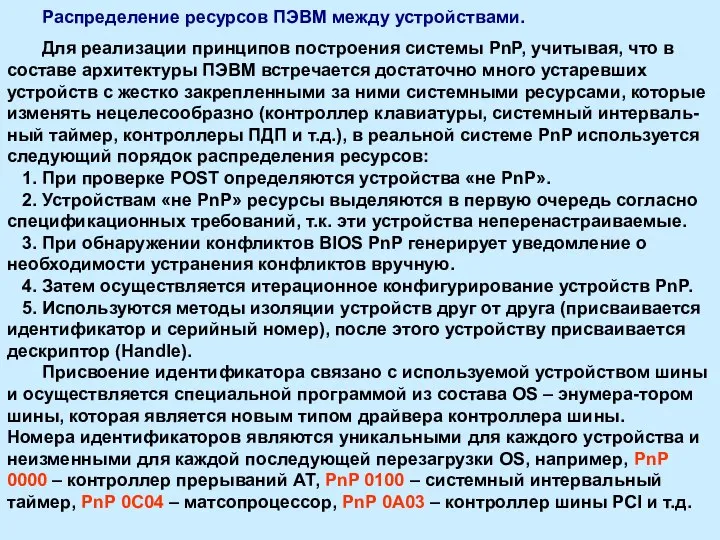
- 19. Распределение ресурсов ПЭВМ между устройствами. Для реализации принципов построения системы PnP, учитывая, что в составе архитектуры
- 20. PnP- спецификация архитектуры аппаратных средств ПЭВМ, используе-мая соответствующими операционными системами для их конфигурирова-ния и исключения конфликтов
- 21. 31. Общие сведения об операционных системах. Общие понятия об операционной системе. Чтобы полностью овладеть всеми возможностями
- 22. Архитектура операционной системы Windows NT/2000/XP. Диспетчер объектов Справочный монитор защиты Диспетчер процессов Диспетчер виртуальной памяти Диспетчер
- 23. Пояснения к архитектуре операционной системы. Пользовательский режим. Большая часть приложений, запускаемых пользователем, работает в пользовательском режиме.
- 24. Модуль EXEcuteve. Так обозначаются в Windows NT/2000/XP программные компоненты, работающие в режиме ядра. Эти компоненты включают
- 25. Процессы и потоки. Процесс – это программа, которую можно запустить в рабочей среде ОС. Каждый процесс
- 26. Службы и приложения пользовательского режима. В пользовательском режиме работают процессы 3-х типов с различным уровнем привилегий.
- 27. Порядок загрузки операционной системы. Загрузка любой операционной системы после завершения операций инициализации аппаратных средств предусматривает следующие
- 28. Файлы, необходимые для успешного запуска ОС Windows XP. Процедура запуска системы закончится неудачей, если хотя бы
- 30. Скачать презентацию
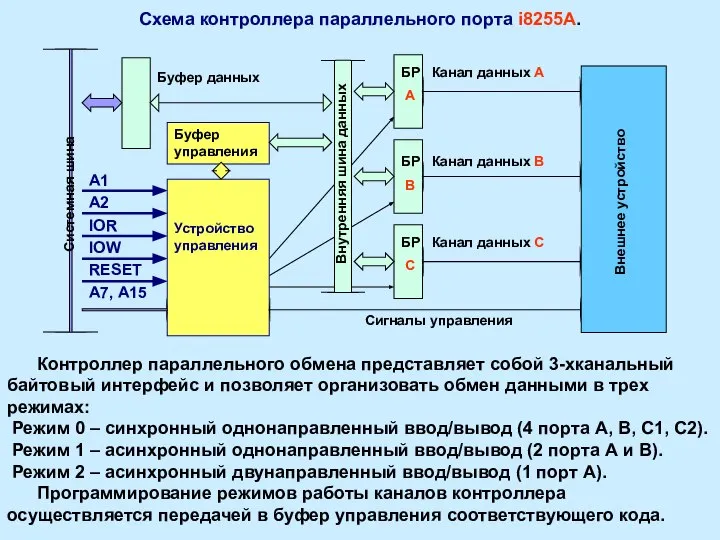
Схема контроллера параллельного порта i8255A.
Устройство управления
Буфер управления
Внешнее устройство
Системная шина
Внутренняя шина данных
Буфер
Схема контроллера параллельного порта i8255A.
Устройство управления
Буфер управления
Внешнее устройство
Системная шина
Внутренняя шина данных
Буфер
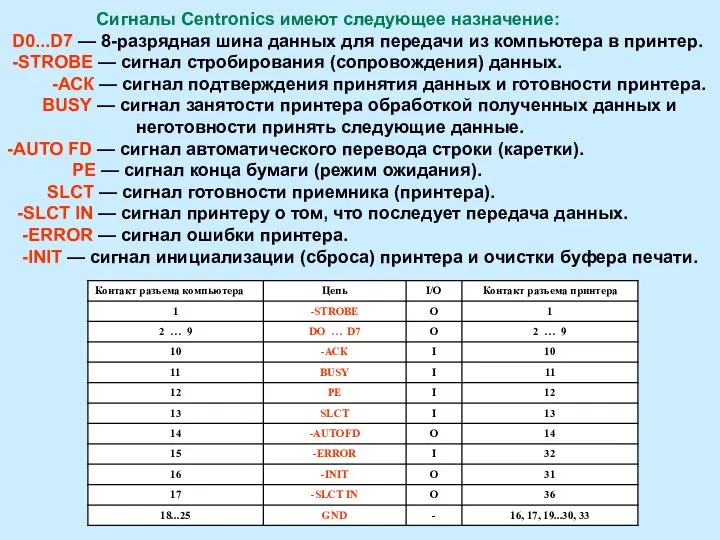
Сигналы Centronics имеют следующее назначение:
D0...D7 — 8-разрядная шина данных
Сигналы Centronics имеют следующее назначение:
D0...D7 — 8-разрядная шина данных
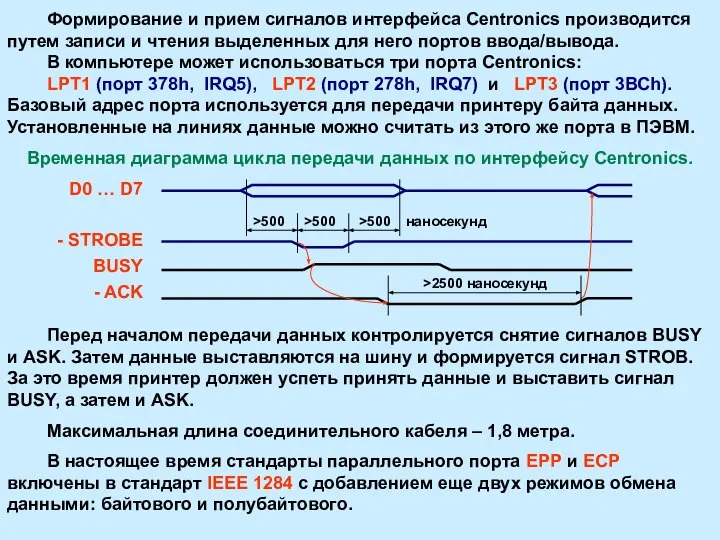
Формирование и прием сигналов интерфейса Centronics производится путем записи и
Формирование и прием сигналов интерфейса Centronics производится путем записи и
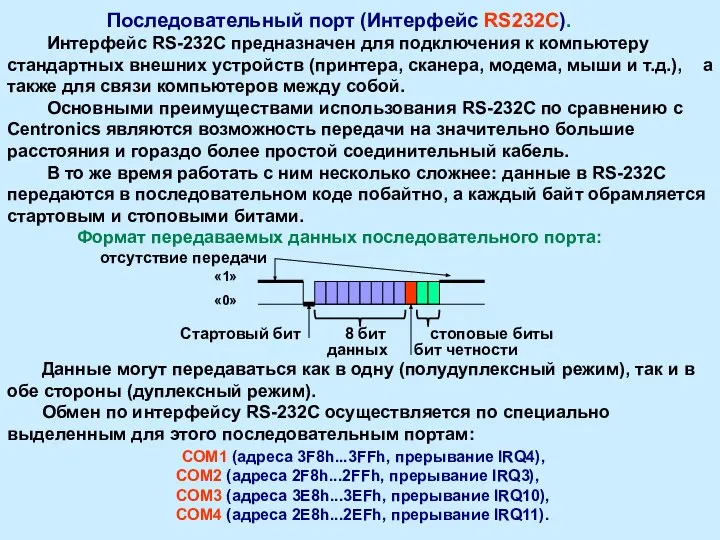
Последовательный порт (Интерфейс RS232C).
Интерфейс RS-232C предназначен для подключения к
Последовательный порт (Интерфейс RS232C).
Интерфейс RS-232C предназначен для подключения к

Схема контроллера последовательного порта i8250.
Устройство управления
Буфер 1 управления
Внешнее устройство
Системная шина
Буфер данных
Сигналы
Схема контроллера последовательного порта i8250.
Устройство управления
Буфер 1 управления
Внешнее устройство
Системная шина
Буфер данных
Сигналы
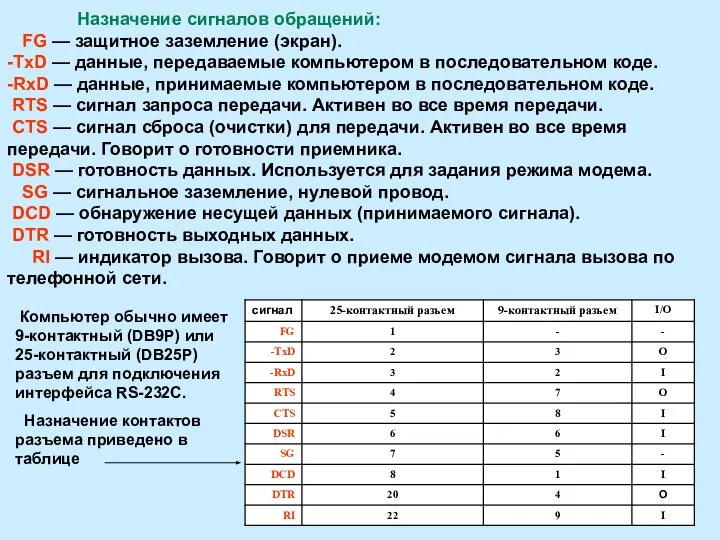
Назначение сигналов обращений:
FG — защитное заземление (экран).
-TxD — данные,
Назначение сигналов обращений:
FG — защитное заземление (экран).
-TxD — данные,
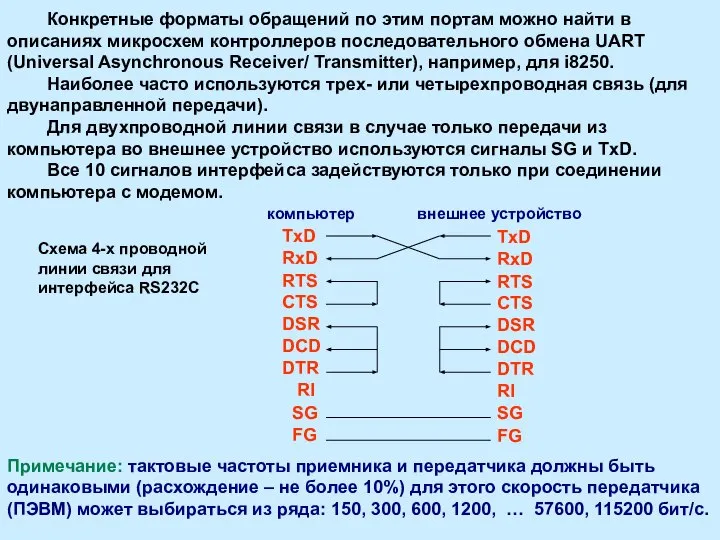
Конкретные форматы обращений по этим портам можно найти в описаниях
Конкретные форматы обращений по этим портам можно найти в описаниях
29.Подсистема ввода-вывода.
Назначение, структура и задачи BIOS.
BIOS (Basic
29.Подсистема ввода-вывода.
Назначение, структура и задачи BIOS.
BIOS (Basic
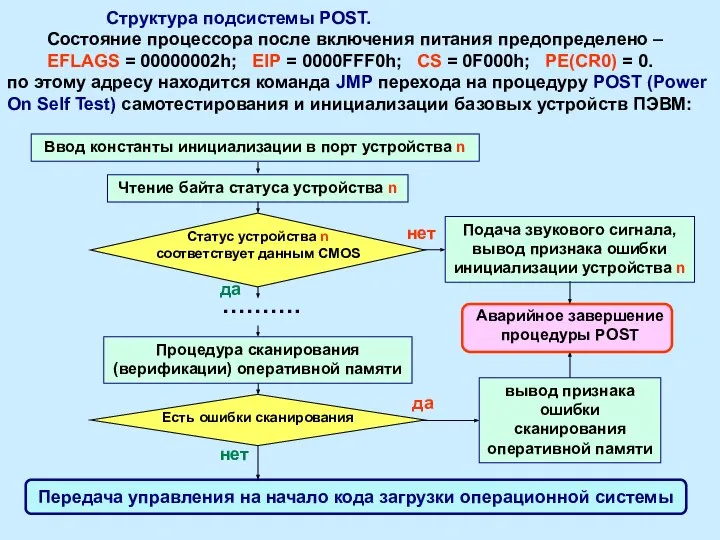
Структура подсистемы POST.
Состояние процессора после включения питания предопределено
Структура подсистемы POST.
Состояние процессора после включения питания предопределено
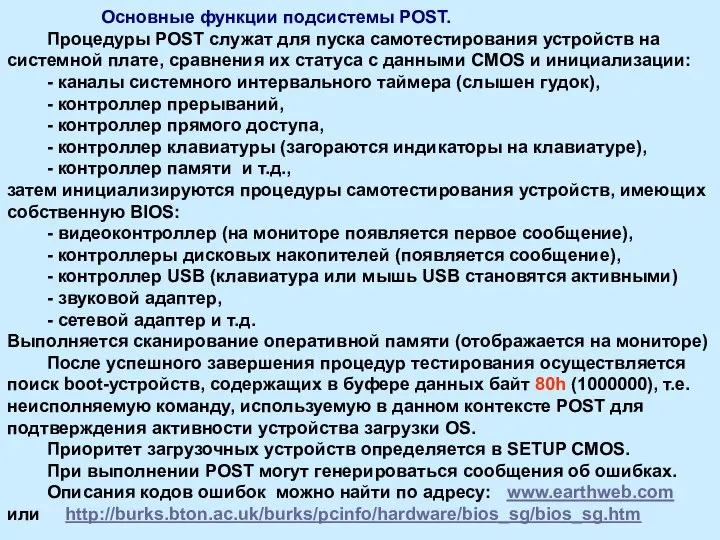
Основные функции подсистемы POST.
Процедуры POST служат для пуска самотестирования
Основные функции подсистемы POST.
Процедуры POST служат для пуска самотестирования
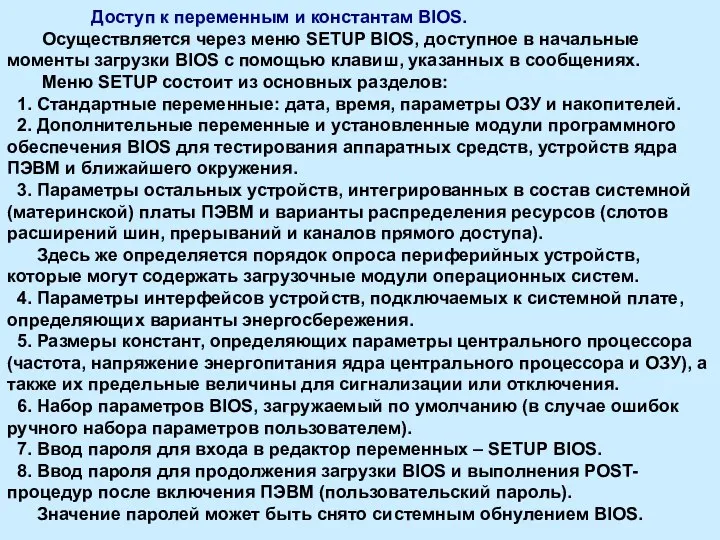
Доступ к переменным и константам BIOS.
Осуществляется через меню SETUP
Доступ к переменным и константам BIOS.
Осуществляется через меню SETUP
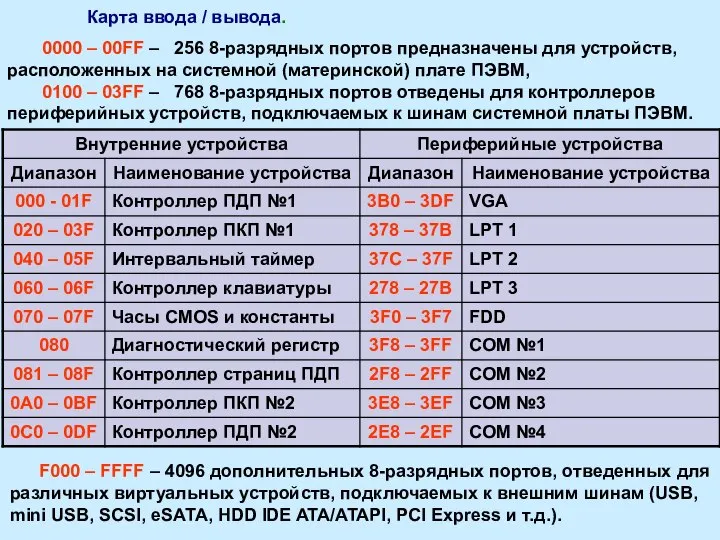
Карта ввода / вывода.
0000 – 00FF – 256 8-разрядных
Карта ввода / вывода.
0000 – 00FF – 256 8-разрядных
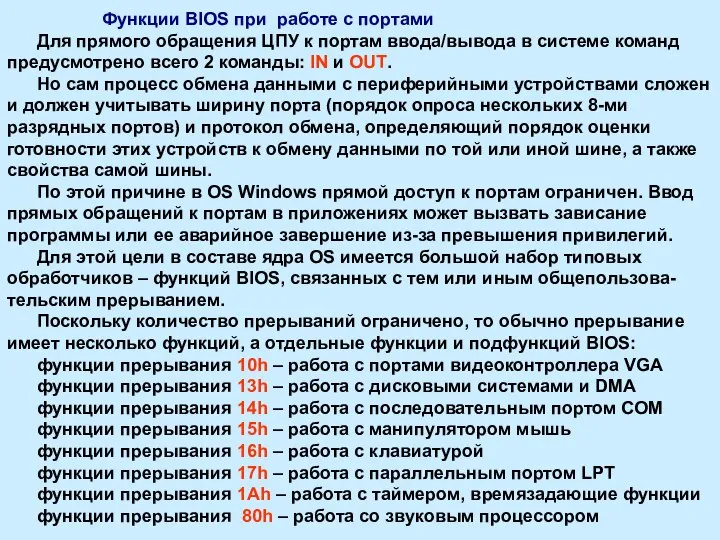
Функции BIOS при работе с портами
Для прямого обращения ЦПУ
Функции BIOS при работе с портами
Для прямого обращения ЦПУ
30. Система Plug & Play автоопределения устройств ПЭВМ.
Основные принципы
30. Система Plug & Play автоопределения устройств ПЭВМ.
Основные принципы
Современная система PnP состоит из следующих компонентов:
1. BIOS стандарта
Современная система PnP состоит из следующих компонентов:
1. BIOS стандарта
Подсистема ввода/вывода ПЭВМ и ядро OS решает следующие задачи:
1.
Подсистема ввода/вывода ПЭВМ и ядро OS решает следующие задачи:
1.
6. Арбитр ресурсов (служба OS PnP).
Основные функции:
- Обновление
6. Арбитр ресурсов (служба OS PnP).
Основные функции:
- Обновление
Распределение ресурсов ПЭВМ между устройствами.
Для реализации принципов построения системы
Распределение ресурсов ПЭВМ между устройствами.
Для реализации принципов построения системы
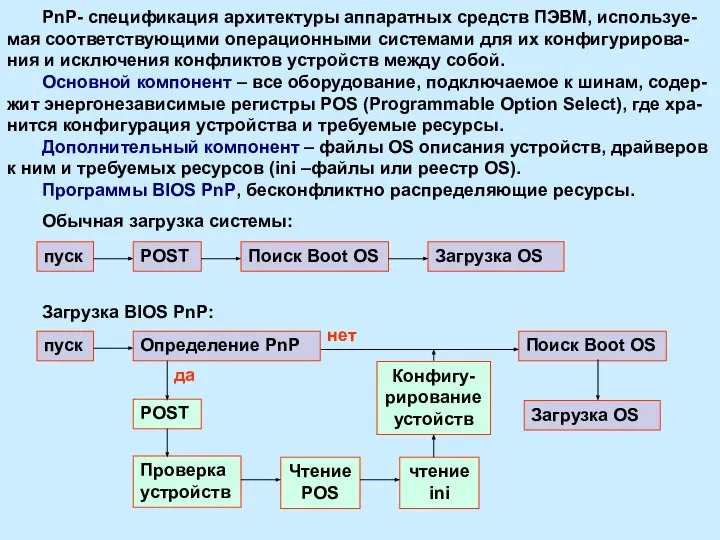
PnP- спецификация архитектуры аппаратных средств ПЭВМ, используе-мая соответствующими операционными системами
PnP- спецификация архитектуры аппаратных средств ПЭВМ, используе-мая соответствующими операционными системами
31. Общие сведения об операционных системах.
Общие понятия об операционной
31. Общие сведения об операционных системах.
Общие понятия об операционной
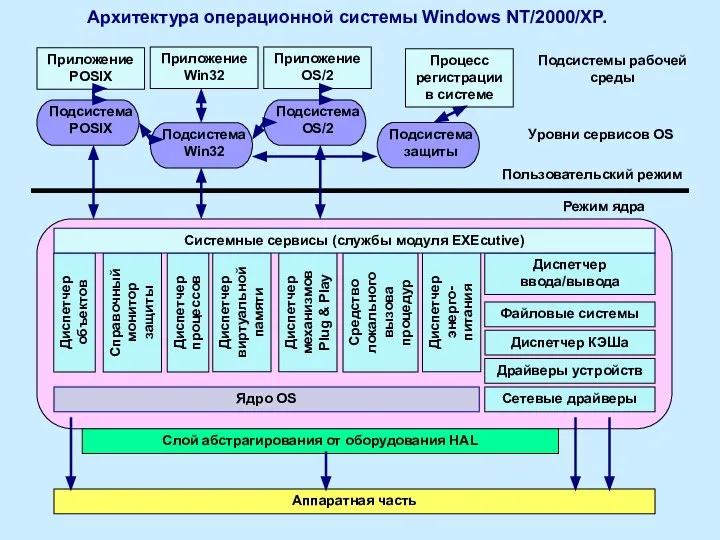
Архитектура операционной системы Windows NT/2000/XP.
Диспетчер объектов
Справочный монитор защиты
Диспетчер процессов
Диспетчер виртуальной
Архитектура операционной системы Windows NT/2000/XP.
Диспетчер объектов
Справочный монитор защиты
Диспетчер процессов
Диспетчер виртуальной
Пояснения к архитектуре операционной системы.
Пользовательский режим.
Большая часть приложений,
Пояснения к архитектуре операционной системы.
Пользовательский режим.
Большая часть приложений,
Модуль EXEcuteve.
Так обозначаются в Windows NT/2000/XP программные компоненты, работающие
Модуль EXEcuteve.
Так обозначаются в Windows NT/2000/XP программные компоненты, работающие
Процессы и потоки.
Процесс – это программа, которую можно запустить
Процессы и потоки.
Процесс – это программа, которую можно запустить
Службы и приложения пользовательского режима.
В пользовательском режиме работают процессы
Службы и приложения пользовательского режима.
В пользовательском режиме работают процессы
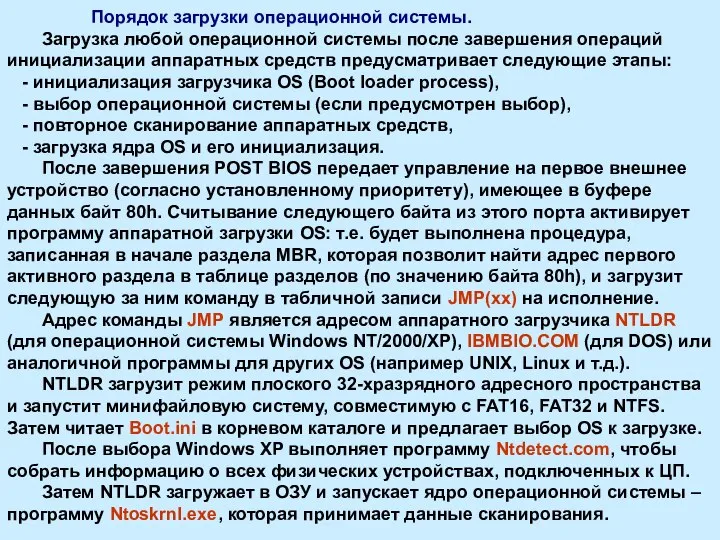
Порядок загрузки операционной системы.
Загрузка любой операционной системы после завершения
Порядок загрузки операционной системы.
Загрузка любой операционной системы после завершения
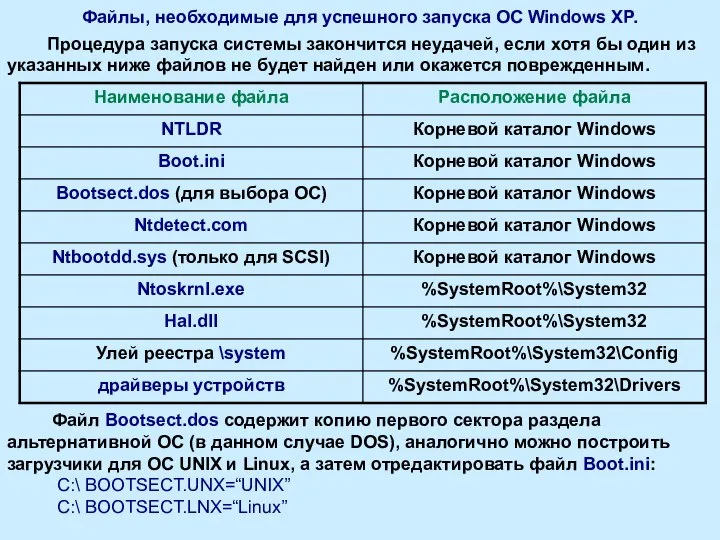
Файлы, необходимые для успешного запуска ОС Windows XP.
Процедура запуска
Файлы, необходимые для успешного запуска ОС Windows XP.
Процедура запуска
 на тему: «Сделки: историко-правовые аспекты и современное гражданско-правовое регулирование» Выполнила: Макарычева С.И. Научный р
на тему: «Сделки: историко-правовые аспекты и современное гражданско-правовое регулирование» Выполнила: Макарычева С.И. Научный р Спорт во мне
Спорт во мне химия
химия Презентация на тему: День Святого Валентина 9 класс
Презентация на тему: День Святого Валентина 9 класс Презентация "Русский национальный костюм" - скачать презентации по МХК
Презентация "Русский национальный костюм" - скачать презентации по МХК поделка коти - презентация для начальной школы
поделка коти - презентация для начальной школы Патогенное действие факторов внешней среды
Патогенное действие факторов внешней среды БИБЛИОТЕЧНЫЙ УРОК: «Периодика для детей»
БИБЛИОТЕЧНЫЙ УРОК: «Периодика для детей» Что мешает писать продающие тексты? Дмитрий КОТ
Что мешает писать продающие тексты? Дмитрий КОТ Памятка для родителей ПФДО
Памятка для родителей ПФДО Языковые нормы официально-делового стиля
Языковые нормы официально-делового стиля Как Никита играл в доктора - презентация для начальной школы_
Как Никита играл в доктора - презентация для начальной школы_ Основы системного анализа 8
Основы системного анализа 8 Медицинский регион Гессен проф. д.м.н. Райнер Г.Х. Моосдорф, председатель Правления Medical Network Hessen, представитель федеральной зем
Медицинский регион Гессен проф. д.м.н. Райнер Г.Х. Моосдорф, председатель Правления Medical Network Hessen, представитель федеральной зем Енергетична установка контейнеровозу дедвейтом 60640 т
Енергетична установка контейнеровозу дедвейтом 60640 т Законодательство в области авторского права и интеллектуальной собственности
Законодательство в области авторского права и интеллектуальной собственности WWW технология
WWW технология Организация стока поверхностных вод (Тема 3)
Организация стока поверхностных вод (Тема 3) Weihnachten in Deutschland
Weihnachten in Deutschland Масленица
Масленица Следящее рекуперативно-реостатное торможение
Следящее рекуперативно-реостатное торможение Рабочая профессия слесарь-электрик по ремонту электрооборудования
Рабочая профессия слесарь-электрик по ремонту электрооборудования Лапшина Ольга Ивановна Учитель английского языка. МОУ Первомайская СОШ
Лапшина Ольга Ивановна Учитель английского языка. МОУ Первомайская СОШ Гр. заняття Т-1.2.ppt
Гр. заняття Т-1.2.ppt Дэниэл Трейсман, книга «Возвращение: Путь России от Горбачёва до Медведева»
Дэниэл Трейсман, книга «Возвращение: Путь России от Горбачёва до Медведева» продукция ТМ Помещик Крупнов
продукция ТМ Помещик Крупнов Актуальные направления идеологической работы в Республике Беларусь
Актуальные направления идеологической работы в Республике Беларусь Система спинного мозга
Система спинного мозга