- Переходные процессы в электроприводах

Содержание
- 2. Расчет продолжительности переходных процессов электропривода. Исходя из основного уравнения движения электропривода с постоянным моментом инерции можно
- 3. Расчет продолжительности переходных процессов электропривода. Из-за сложности представления аналитической зависимости избыточного момента от скорости вращения и
- 4. Расчет продолжительности переходных процессов электропривода. Суть метода конечных приращений сводится к замене дифференциалов переменных величин dt
- 5. Расчет продолжительности переходных процессов электропривода. Таким образом, полная продолжительность переходного процесса электропривода будет равна где n
- 6. Потери энергии при пуске и торможении электропривода и пути их снижения. Общие потери мощности в электродвигателе
- 7. Потери энергии при пуске и торможении электропривода и пути их снижения. Под переменными потерями подразумеваются потери,
- 8. Потери энергии при пуске и торможении электропривода и пути их снижения. В трехфазных асинхронных электродвигателях где
- 9. Потери энергии при пуске и торможении электропривода и пути их снижения. Переменные потери мощности, выделяющиеся в
- 10. Потери энергии при пуске и торможении электропривода и пути их снижения. Большое значение определение потерь электроэнергии
- 11. Потери энергии при пуске и торможении электропривода и пути их снижения. Потери энергии при пуске АД
- 12. Потери энергии при пуске и торможении электропривода и пути их снижения. Для АД с короткозамкнутым ротором
- 13. Потери энергии при пуске и торможении электропривода и пути их снижения. Номинальные электрические потери мощности электродвигателя
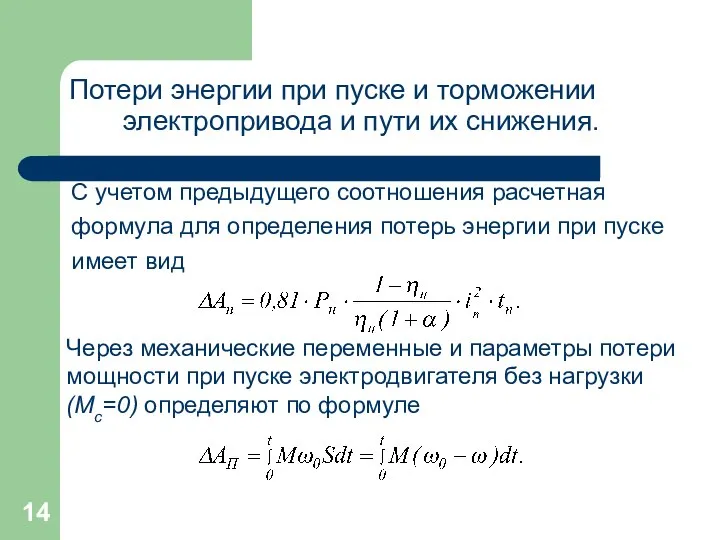
- 14. Потери энергии при пуске и торможении электропривода и пути их снижения. С учетом предыдущего соотношения расчетная
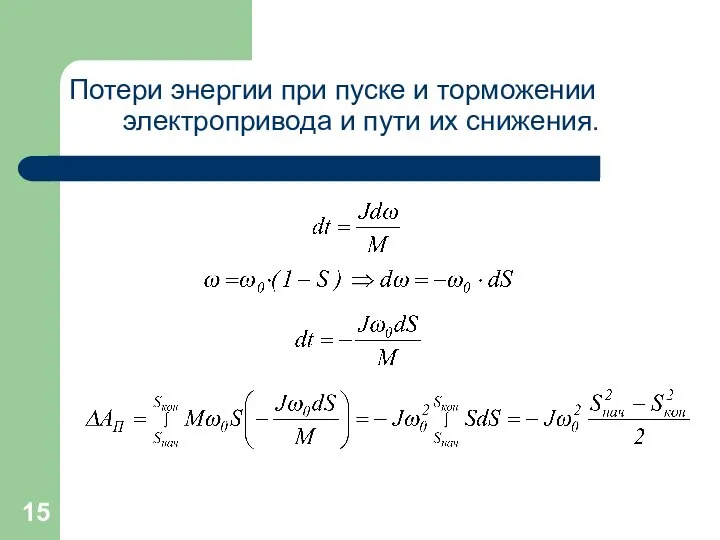
- 15. Потери энергии при пуске и торможении электропривода и пути их снижения.
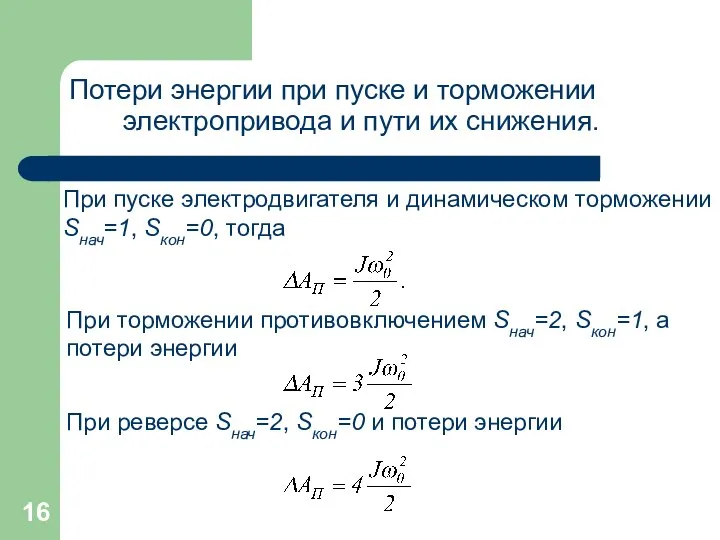
- 16. Потери энергии при пуске и торможении электропривода и пути их снижения. При пуске электродвигателя и динамическом
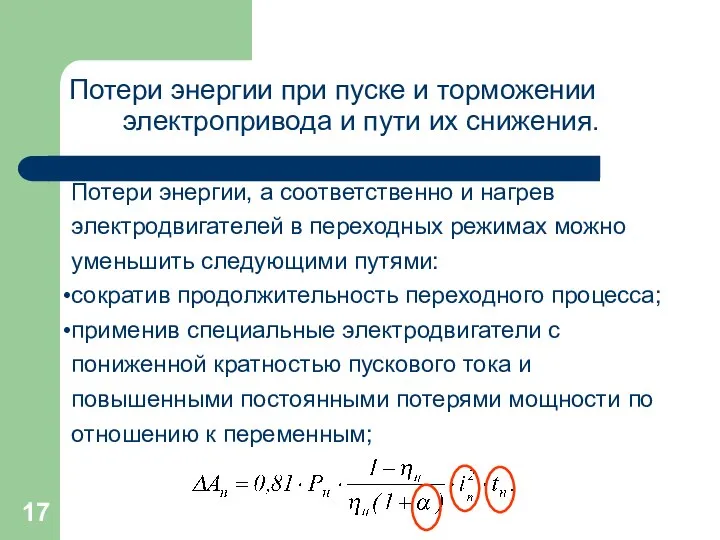
- 17. Потери энергии при пуске и торможении электропривода и пути их снижения. Потери энергии, а соответственно и
- 18. Потери энергии при пуске и торможении электропривода и пути их снижения. применив ступенчатое поочередное переключение ЭП
- 19. Статическая устойчивость электропривода. При рассмотрении динамики различных электроприводов возникает задача оценки их устойчивой работы при возникновении
- 20. Статическая устойчивость электропривода. Статическую устойчивость ЭП рассматривают в том случае, если длительность избыточного момента нагрузки превышает
- 21. Статическая устойчивость электропривода. При возникновении в системе электропривода внешнего воздействия уравнение движения можно записать в виде
- 22. Статическая устойчивость электропривода. Разделяя переменные, запишем дифференциальное уравнение решая которое будем иметь где с – постоянная
- 23. Статическая устойчивость электропривода. Из начальных условий при t=0 Δω=Δωнач. Тогда на основании последнего соотношения с= Δωнач.
- 24. Статическая устойчивость электропривода. Из предыдущего уравнения следует, что для обеспечения статической устойчивости необходимо, чтобы при t→∞
- 25. Динамическая устойчивость электропривода. При работе ЭП момент статического сопротивления перегрузки Мсп, действующий со стороны нагрузки, может
- 26. Динамическая устойчивость электропривода. При динамической устойчивости работоспособность ЭП сохраняется за счет дополнительного действия кинетической энергии движущихся
- 27. Динамическая устойчивость электропривода. Рабочий участок механической характеристики аппроксимируется прямой. В этом случае при ударной нагрузке увеличение
- 28. Динамическая устойчивость электропривода. Для электропривода с асинхронным электродвигателем где Sн - скольжение АД при номинальном моменте
- 29. Динамическая устойчивость электропривода. Момент электродвигателя достигает максимального значения по истечении некоторого допустимого времени перегрузки.
- 31. Скачать презентацию
Расчет продолжительности переходных процессов электропривода.
Исходя из основного уравнения движения электропривода с
Расчет продолжительности переходных процессов электропривода.
Исходя из основного уравнения движения электропривода с
Расчет продолжительности переходных процессов электропривода.
Из-за сложности представления аналитической зависимости избыточного момента
Расчет продолжительности переходных процессов электропривода.
Из-за сложности представления аналитической зависимости избыточного момента
Расчет продолжительности переходных процессов электропривода.
Суть метода конечных приращений сводится к замене
Расчет продолжительности переходных процессов электропривода.
Суть метода конечных приращений сводится к замене
Расчет продолжительности переходных процессов электропривода.
Таким образом, полная продолжительность переходного процесса электропривода
Расчет продолжительности переходных процессов электропривода.
Таким образом, полная продолжительность переходного процесса электропривода
Потери энергии при пуске и торможении электропривода и пути их снижения.
Общие
Потери энергии при пуске и торможении электропривода и пути их снижения.
Общие
Потери энергии при пуске и торможении электропривода и пути их снижения.
Под
Потери энергии при пуске и торможении электропривода и пути их снижения.
Под
Потери энергии при пуске и торможении электропривода и пути их снижения.
В
Потери энергии при пуске и торможении электропривода и пути их снижения.
В
Потери энергии при пуске и торможении электропривода и пути их снижения.
Переменные
Потери энергии при пуске и торможении электропривода и пути их снижения.
Переменные
Потери энергии при пуске и торможении электропривода и пути их снижения.
Большое
Потери энергии при пуске и торможении электропривода и пути их снижения.
Большое
Потери энергии при пуске и торможении электропривода и пути их снижения.
Потери
Потери энергии при пуске и торможении электропривода и пути их снижения.
Потери
Потери энергии при пуске и торможении электропривода и пути их снижения.
Для
Потери энергии при пуске и торможении электропривода и пути их снижения.
Для
Потери энергии при пуске и торможении электропривода и пути их снижения.
Номинальные
Потери энергии при пуске и торможении электропривода и пути их снижения.
Номинальные
Потери энергии при пуске и торможении электропривода и пути их снижения.
С
Потери энергии при пуске и торможении электропривода и пути их снижения.
С
Потери энергии при пуске и торможении электропривода и пути их снижения.
Потери энергии при пуске и торможении электропривода и пути их снижения.
Потери энергии при пуске и торможении электропривода и пути их снижения.
При
Потери энергии при пуске и торможении электропривода и пути их снижения.
При
Потери энергии при пуске и торможении электропривода и пути их снижения.
Потери
Потери энергии при пуске и торможении электропривода и пути их снижения.
Потери
Потери энергии при пуске и торможении электропривода и пути их снижения.
применив
Потери энергии при пуске и торможении электропривода и пути их снижения.
применив
Статическая устойчивость электропривода.
При рассмотрении динамики различных электроприводов возникает задача оценки
Статическая устойчивость электропривода.
При рассмотрении динамики различных электроприводов возникает задача оценки
Статическая устойчивость электропривода.
Статическую устойчивость ЭП рассматривают в том случае, если
Статическая устойчивость электропривода.
Статическую устойчивость ЭП рассматривают в том случае, если
Статическая устойчивость электропривода.
При возникновении в системе электропривода внешнего воздействия уравнение
Статическая устойчивость электропривода.
При возникновении в системе электропривода внешнего воздействия уравнение
Статическая устойчивость электропривода.
Разделяя переменные, запишем дифференциальное уравнение
решая которое будем иметь
где
Статическая устойчивость электропривода.
Разделяя переменные, запишем дифференциальное уравнение
решая которое будем иметь
где
Статическая устойчивость электропривода.
Из начальных условий при t=0 Δω=Δωнач. Тогда на
Статическая устойчивость электропривода.
Из начальных условий при t=0 Δω=Δωнач. Тогда на
Статическая устойчивость электропривода.
Из предыдущего уравнения следует, что для обеспечения статической
Статическая устойчивость электропривода.
Из предыдущего уравнения следует, что для обеспечения статической
Динамическая устойчивость электропривода.
При работе ЭП момент статического сопротивления перегрузки Мсп,
Динамическая устойчивость электропривода.
При работе ЭП момент статического сопротивления перегрузки Мсп,
Динамическая устойчивость электропривода.
При динамической устойчивости работоспособность ЭП сохраняется за счет
Динамическая устойчивость электропривода.
При динамической устойчивости работоспособность ЭП сохраняется за счет
Динамическая устойчивость электропривода.
Рабочий участок механической характеристики аппроксимируется прямой. В этом
Динамическая устойчивость электропривода.
Рабочий участок механической характеристики аппроксимируется прямой. В этом
Динамическая устойчивость электропривода.
Для электропривода с асинхронным электродвигателем
где Sн -
Динамическая устойчивость электропривода.
Для электропривода с асинхронным электродвигателем
где Sн -

Динамическая устойчивость электропривода.
Момент электродвигателя достигает максимального значения по истечении некоторого
Динамическая устойчивость электропривода.
Момент электродвигателя достигает максимального значения по истечении некоторого
 Формирования социального государства в России
Формирования социального государства в России Этапы развития художественной культуры
Этапы развития художественной культуры Новая Концепция Таможенного регулирования Внешне экономической деятельности Майстренко Денис Т-115
Новая Концепция Таможенного регулирования Внешне экономической деятельности Майстренко Денис Т-115 Мир камней
Мир камней Путешествие в сказку - презентация для начальной школы_
Путешествие в сказку - презентация для начальной школы_ Презентация Функции государства
Презентация Функции государства Делова карьера менеджера
Делова карьера менеджера  Meine sommerfeiren
Meine sommerfeiren Допинг. От античности до генных технологий XXI века
Допинг. От античности до генных технологий XXI века Категоризация культур
Категоризация культур Основные элементы языка программирования
Основные элементы языка программирования Происхождение славян. Восточные славяне в древности
Происхождение славян. Восточные славяне в древности Родительское собрание в 1 классе «ПРОБЛЕМЫ АДАПТАЦИИ ПЕРВОКЛАССНИКОВ В ШКОЛЕ»
Родительское собрание в 1 классе «ПРОБЛЕМЫ АДАПТАЦИИ ПЕРВОКЛАССНИКОВ В ШКОЛЕ» Стекло — вещество и материал, один из самых древних и, благодаря разнообразию своих свойств, — универсальный в практике чело
Стекло — вещество и материал, один из самых древних и, благодаря разнообразию своих свойств, — универсальный в практике чело Понятие и сущность знаний, умений и навыков Поэтапное формирование умственных действий и понятий
Понятие и сущность знаний, умений и навыков Поэтапное формирование умственных действий и понятий АДМИНИСТРАТИВНО-ПРАВОВЫЕ НОРМЫ Выполнили: Белоусова Саша и Маслова Юля
АДМИНИСТРАТИВНО-ПРАВОВЫЕ НОРМЫ Выполнили: Белоусова Саша и Маслова Юля ГБОУ СПО Санкт-Петербургский колледж управления и экономики «Александровский лицей» Статистика населения
ГБОУ СПО Санкт-Петербургский колледж управления и экономики «Александровский лицей» Статистика населения История марийской письменности
История марийской письменности Развитие ловкости у детей с нарушениями опорнодвигательного аппарата
Развитие ловкости у детей с нарушениями опорнодвигательного аппарата Презентация "Экономическое развитие Российской империи" - скачать презентации по Экономике
Презентация "Экономическое развитие Российской империи" - скачать презентации по Экономике Прощай, Азбука - презентация для начальной школы
Прощай, Азбука - презентация для начальной школы Организационные и программно-нормативные основы юношеского спорта
Организационные и программно-нормативные основы юношеского спорта Стройка. Профессии на стройке
Стройка. Профессии на стройке Спортивно-оздоровительные выезды студентов «Поезд здоровья – 2018»
Спортивно-оздоровительные выезды студентов «Поезд здоровья – 2018» Sun SPARC station (SunOS и Solaris)
Sun SPARC station (SunOS и Solaris) Russia – Chapter 9
Russia – Chapter 9 Умножение многочлена на одночлен. А – 7 урок 1
Умножение многочлена на одночлен. А – 7 урок 1 Устройство компьютера
Устройство компьютера