- Плоское движение тела (практика)

Содержание
- 2. Содержание 1. Основные понятия и определения 1.1. Уравнения и характеристики плоскопараллельного движения тела 1.2. Определение скоростей
- 3. Плоскопараллельным (или плоским) называется такое движе-ние твердого тела, при котором все его точки движутся в плоскостях,
- 4. Для изучения плоского движения тела достаточно исследовать, как движется в плоскости Оху сечение этого тела, образующее
- 5. Чем определяется положение плоской фигуры при движении в плоскости Oxy? Положение плоской фигуры в плоскости Оху
- 6. Закон движения плоской фигуры в ее плоскости, а следова-тельно, и плоского движения твердого тела относительно системы
- 7. Назовите основные кинематические характеристики плоского движения тела? Какая точка выбирается за полюс? В качестве полюса вообще
- 8. Движение плоской фигуры можно рассматривать как сумму двух движений: поступательного движения вместе с полюсом и вращательного
- 9. Чему равна скорость точки B во вращательном движении вокруг полюса? Как формулируется теорема о проекциях скоростей
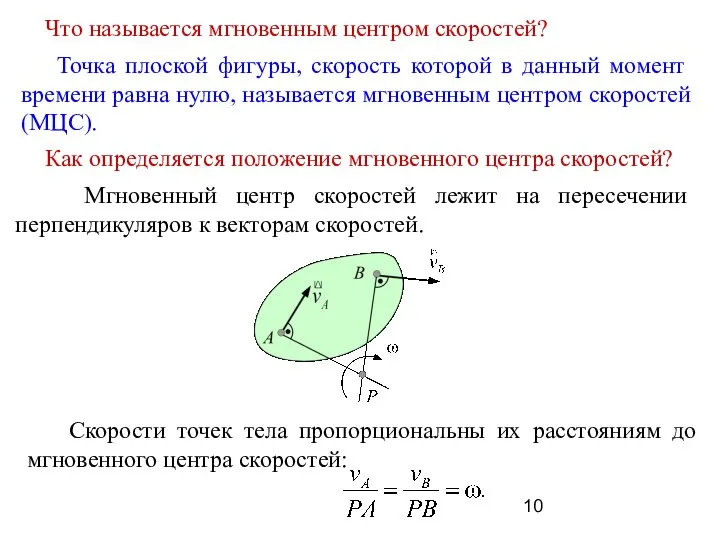
- 10. Что называется мгновенным центром скоростей? Точка плоской фигуры, скорость которой в данный момент времени равна нулю,
- 11. Если векторы скоростей параллельны, то мгновенного центра скоростей нет. Тело совершает мгновенное поступательное движение. Если векторы
- 12. Если векторы скоростей параллельны и противоположны, а перпендикуляры к векто-рам скоростей совпадают, то мгновенный центр скоростей
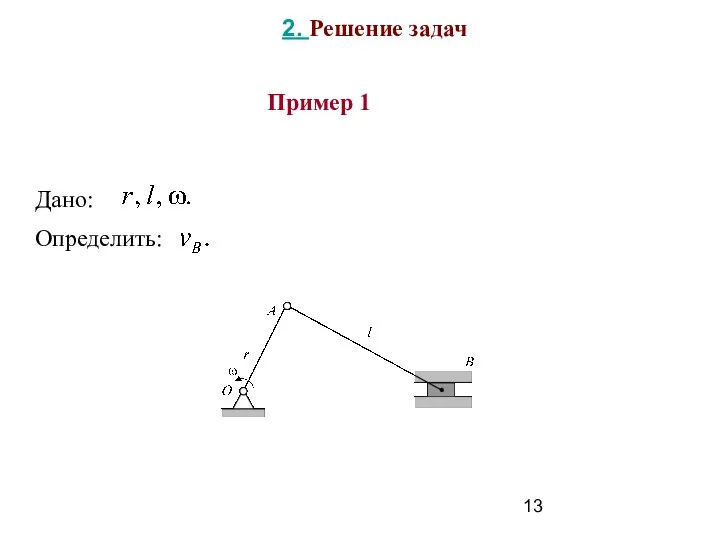
- 13. Пример 1 2. Решение задач
- 14. Решение (Применение формулы Эйлера) В кривошипно-шатунном механизме плоскопараллельное движение совершает шатун АВ. Примем точку А за
- 15. Для определения скорости точки В по формуле Эйлера из точки В отложим вектор скорости точки А.
- 16. Расставим стрелки векторов в соответствии с формулой Эйлера. Из векторного треугольника найдём скорость точки В.
- 17. Попутно можно из треугольника найти скорость точки В во вращательном движении вокруг полюса А.
- 18. Аналитический способ При аналитическом способе применения формулы Эйлера в точке В строятся векторы скоростей, линии действия
- 19. Из полученной системы уравнений находим неизвестные величины. Из второго уравнения: Подставляем vВА в первое уравнение и
- 20. Применение теоремы о проекциях скоростей Построим векторы скоростей точек А и В. Через эти точки проведём
- 21. По теореме о проекциях скоростей двух точек плоской фигуры: Находим из рисунка проекции на ось x
- 22. Определение скорости точки с помощью мгновенного центра скоростей Определим скорость точки А: Построим векторы скоростей точек
- 23. Из точек А и В проведём перпендикуляры к векторам скорос-тей этих точек.
- 24. Точка пересечения перпендикуляров Р – мгновенный центр скоростей. Шатун АВ совершает мгновенное вращательное движение вокруг МЦС.
- 25. Учитывая это равенство, найдём скорость точки В
- 26. 3.1. Скорость груза 1 v1 = 0,5 м/с. Определить угловую скорость подвижного блока 2 и скорость
- 27. 3.2. Для заданного положения шарнирного четырёхзвенника определить скорость точки В, если точка А имеет скорость 1
- 28. 3.3. В дифференциальном механизме с внутренним зацеп-лением зубчатое колесо 1 и кривошип ОА вращаются независи-мо друг
- 29. Ускорение произвольной точки плоской фигуры равно сумме двух ускорений: ускорения полюса и ускорения точки во вращательном
- 30. При решении задач векторное выражение ускорения точки плоской фигуры проецируется на координатные оси: Если неизвестным является
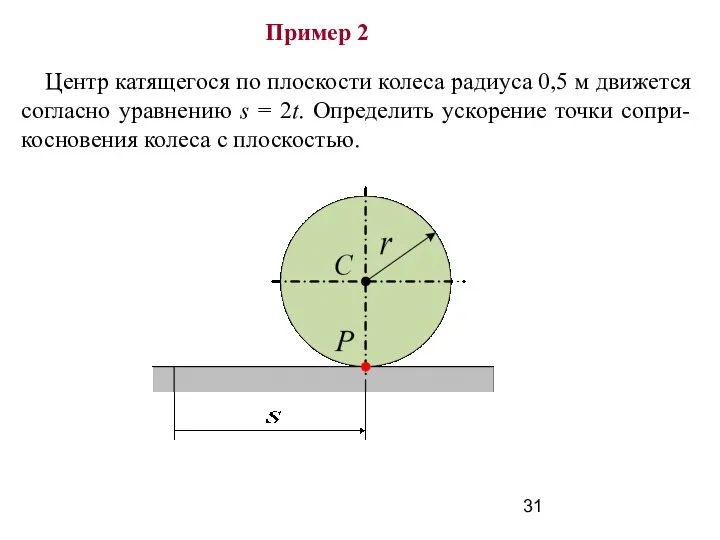
- 31. Пример 2 Центр катящегося по плоскости колеса радиуса 0,5 м движется согласно уравнению s = 2t.
- 32. Дано: r = 0,5 м; s = 2t. Определить: аР. Решение
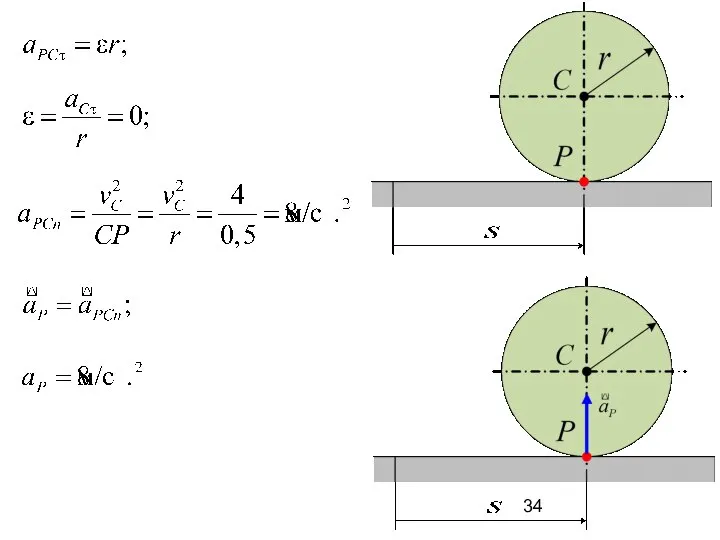
- 33. Принимаем точку С за полюс.
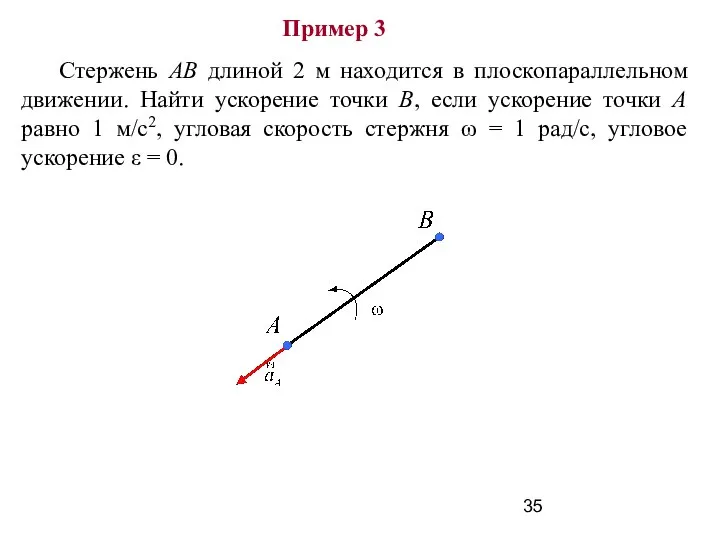
- 35. Пример 3 Стержень АВ длиной 2 м находится в плоскопараллельном движении. Найти ускорение точки В, если
- 36. Дано: АВ = 2 м; аА = 1 м/с2; ω = 1 рад/с; ε = 0.
- 37. Принимаем точку A за полюс.
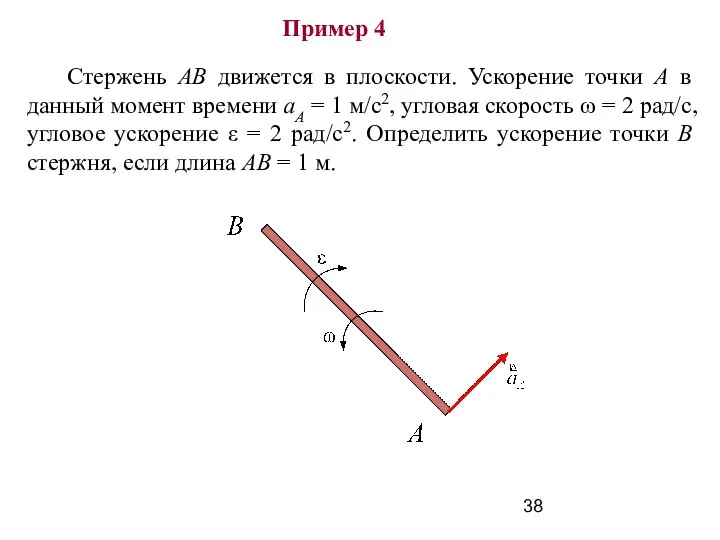
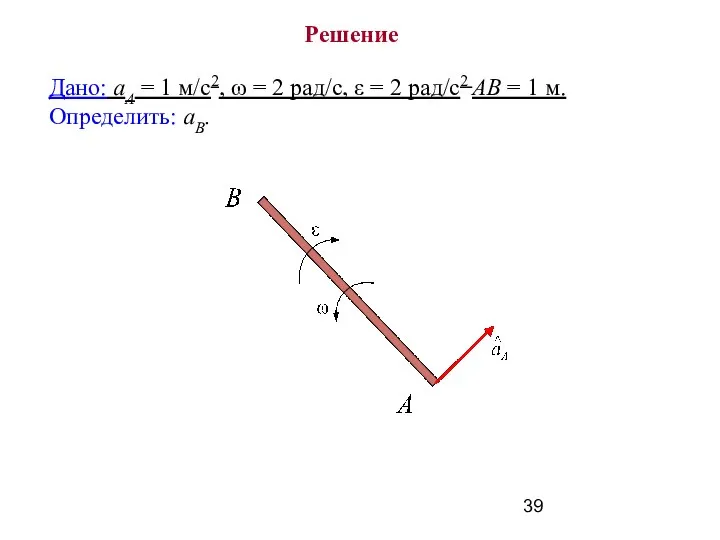
- 38. Пример 4 Стержень АВ движется в плоскости. Ускорение точки А в данный момент времени аА =
- 39. Дано: аА = 1 м/с2, ω = 2 рад/с, ε = 2 рад/c2 АВ = 1
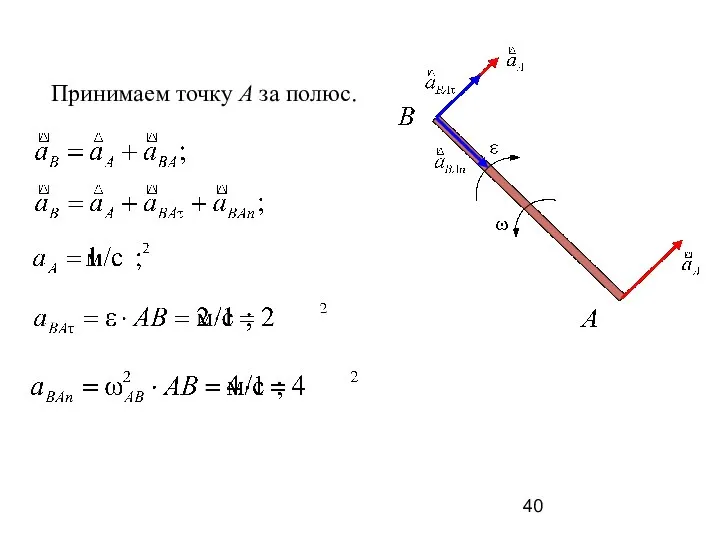
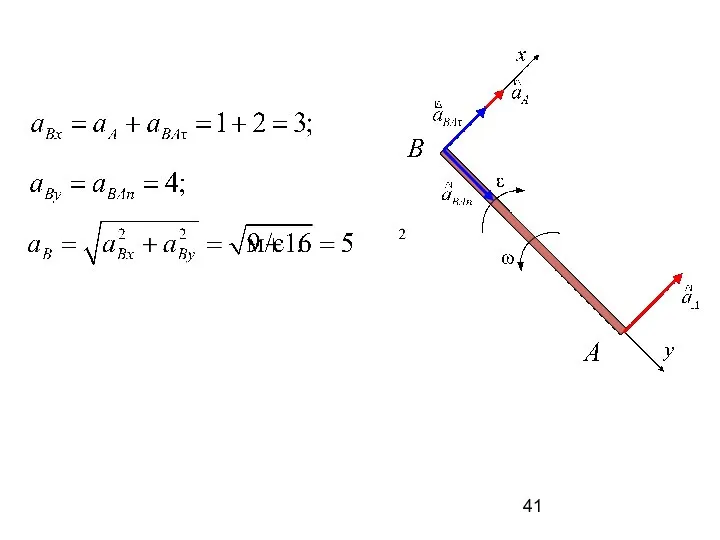
- 40. Принимаем точку A за полюс.
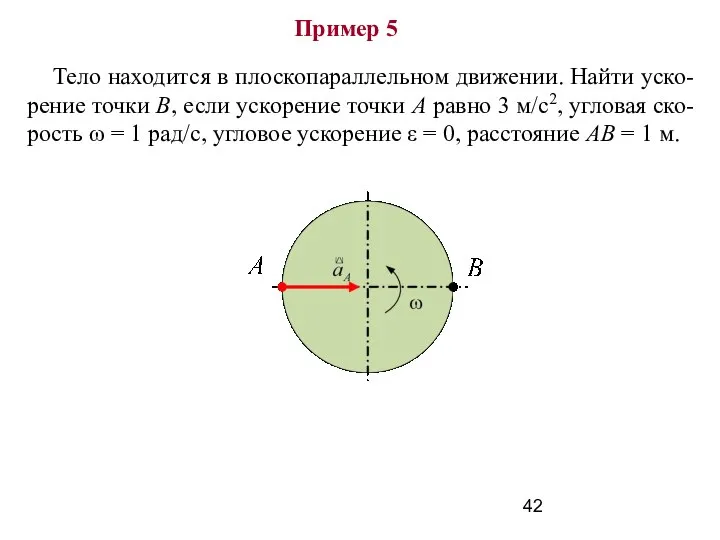
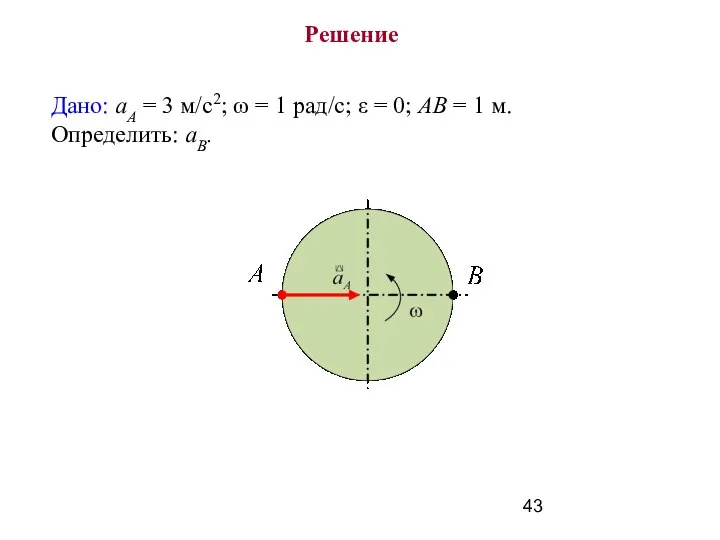
- 42. Пример 5 Тело находится в плоскопараллельном движении. Найти уско-рение точки В, если ускорение точки А равно
- 43. Дано: аА = 3 м/с2; ω = 1 рад/с; ε = 0; АВ = 1 м.
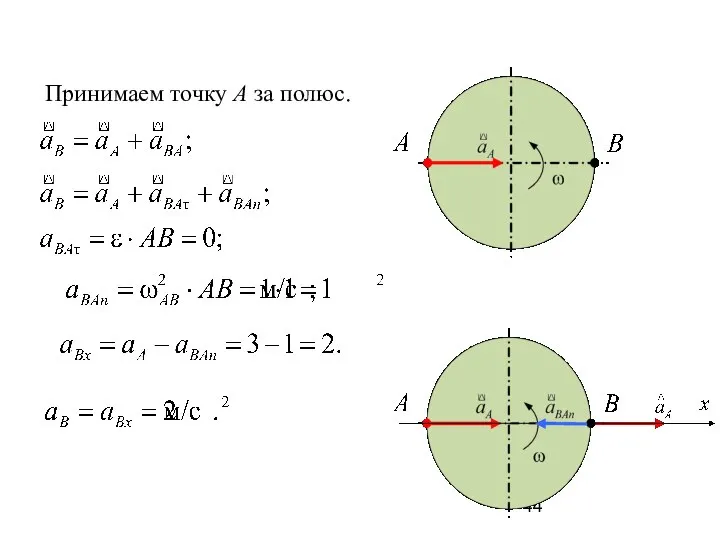
- 44. Принимаем точку A за полюс.
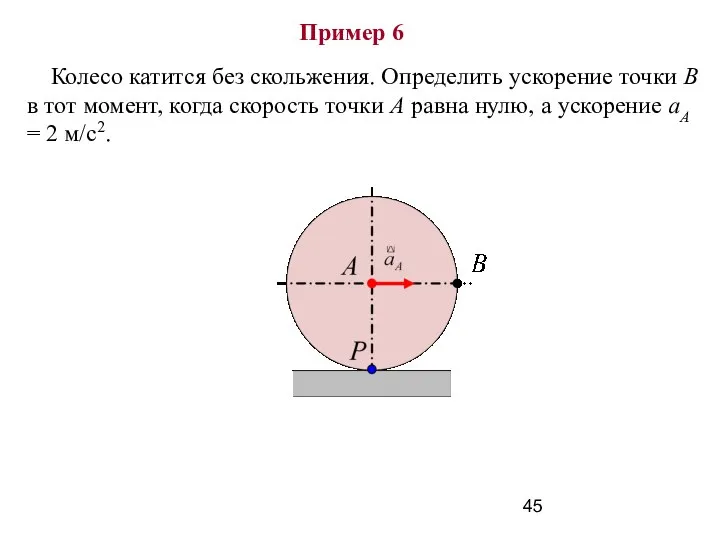
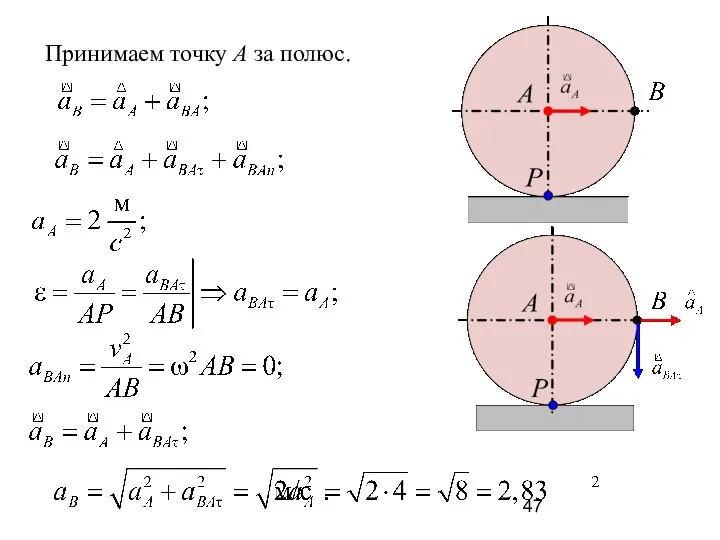
- 45. Пример 6 Колесо катится без скольжения. Определить ускорение точки В в тот момент, когда скорость точки
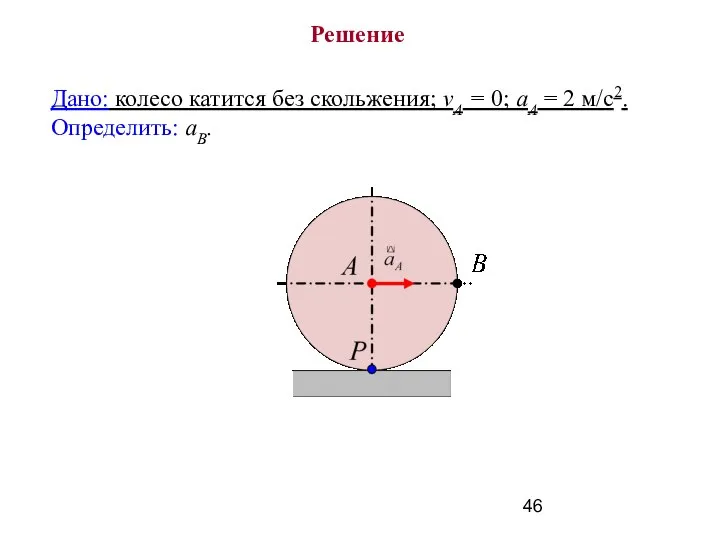
- 46. Дано: колесо катится без скольжения; vА = 0; аА = 2 м/с2. Определить: аВ. Решение
- 47. Принимаем точку A за полюс.
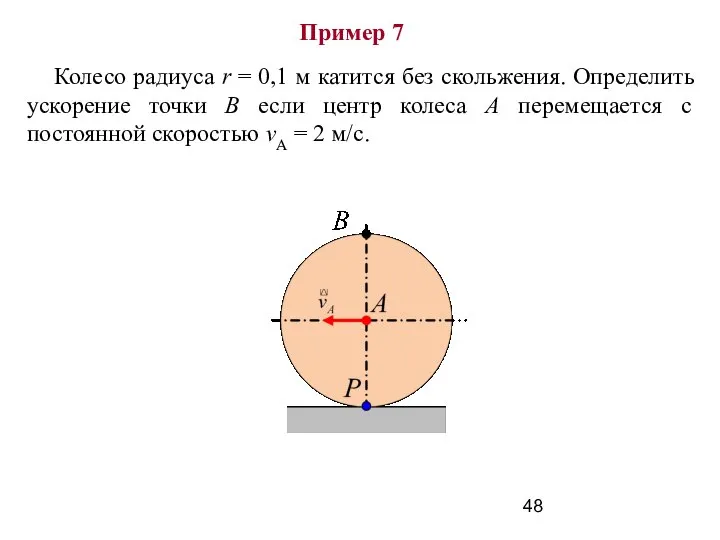
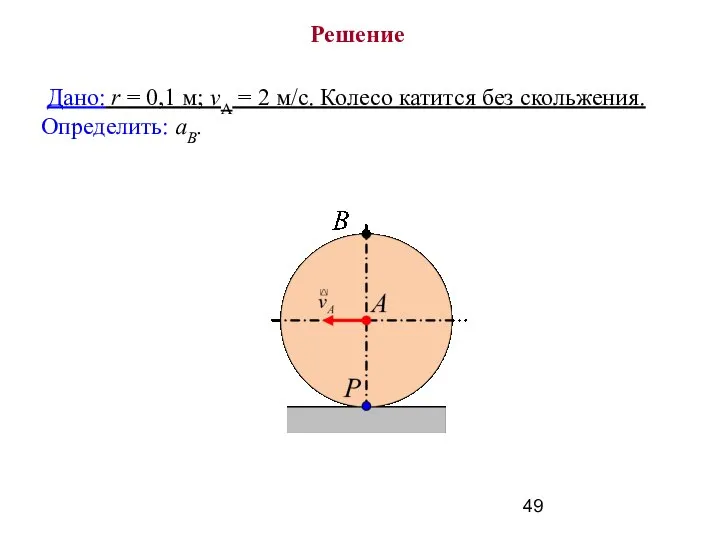
- 48. Пример 7 Колесо радиуса r = 0,1 м катится без скольжения. Определить ускорение точки В если
- 49. Решение Дано: r = 0,1 м; vА = 2 м/с. Колесо катится без скольжения. Определить: аВ.
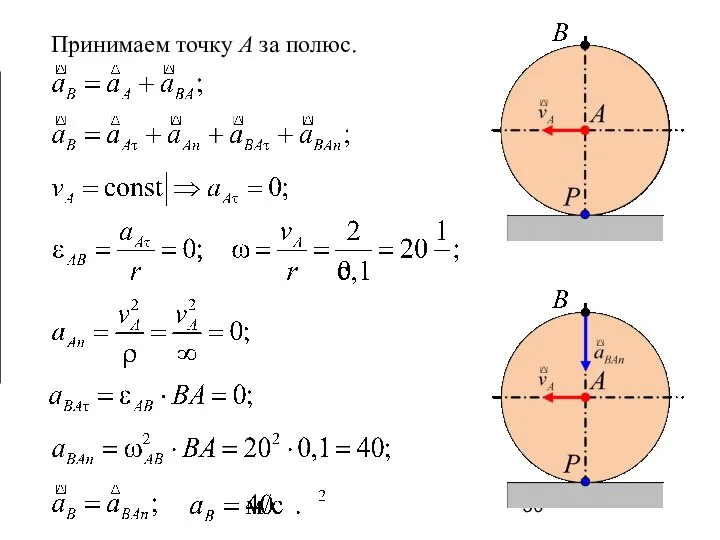
- 50. Принимаем точку A за полюс.
- 51. Пример 8 Скорость центра С колеса, катящегося без скольжения, постоянна. Какой угол в градусах с осью
- 52. Решение Дано: vС = const; какой угол в градусах с осью Ox составляет вектор ускорения точки,
- 53. Принимаем точку С за полюс. Следовательно:
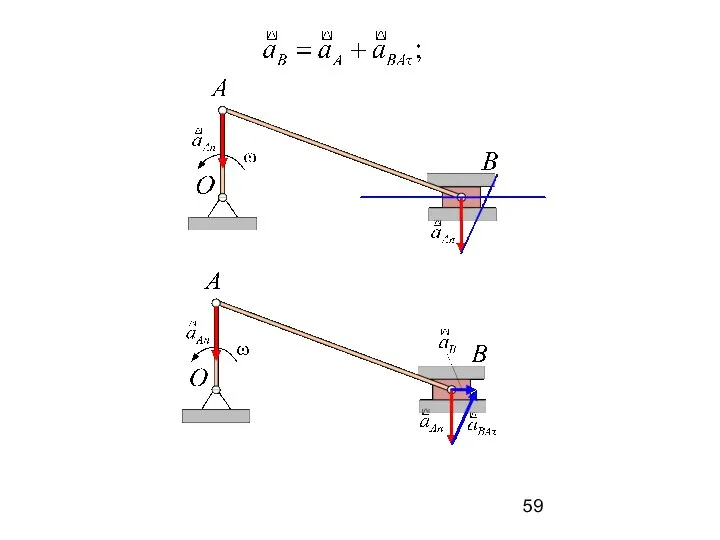
- 54. Пример 9 Определить ускорение ползуна В кривошипно-шатунного механизма в данном положении, если угловая скорость криво-шипа ω
- 55. Дано: ω = 1 рад/с = const; ОА = 0,3 м; АВ = 0,5 м. Определить:
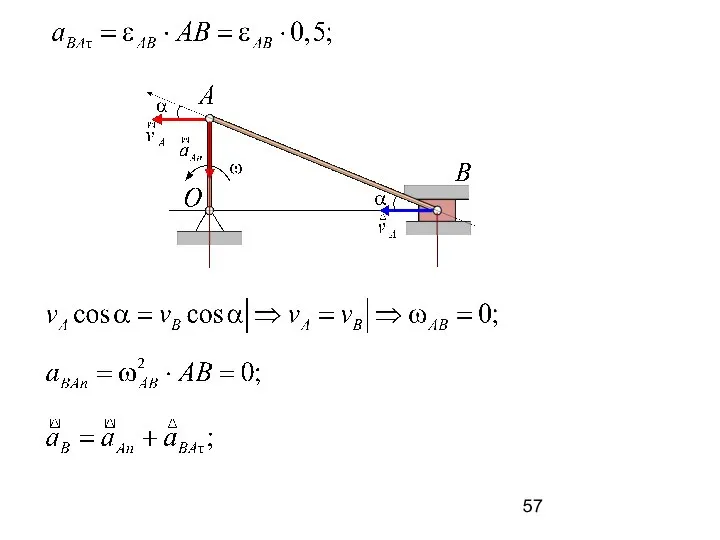
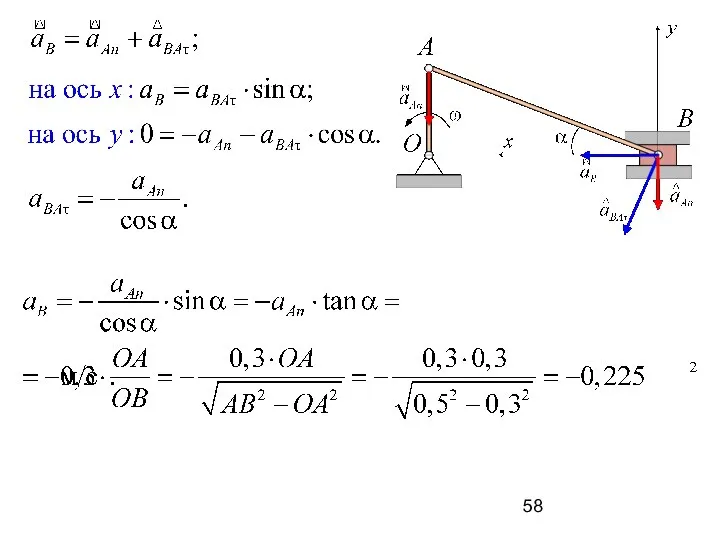
- 56. Принимаем точку A за полюс.
- 60. 5.1. В указанном на рисунке положении четырёхзвенника скорость и ускорение точки А кривошипа ОА равны: vA
- 61. 5.2. Для данного положения механизма определить ускорение ползуна В, если колесо 1 радиуса R = 50
- 62. 5.3. Определить угловое ускорение шатуна АВ кривошипно-шатунного механизма в данном положении, если кривошип ОА вращается с
- 64. Скачать презентацию
Содержание
1. Основные понятия и определения
1.1. Уравнения и характеристики
Содержание
1. Основные понятия и определения
1.1. Уравнения и характеристики
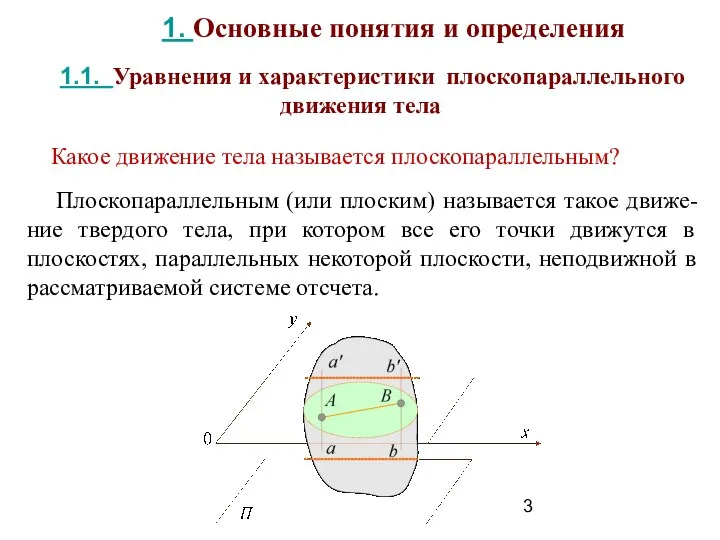
Плоскопараллельным (или плоским) называется такое движе-ние твердого тела, при котором
Плоскопараллельным (или плоским) называется такое движе-ние твердого тела, при котором
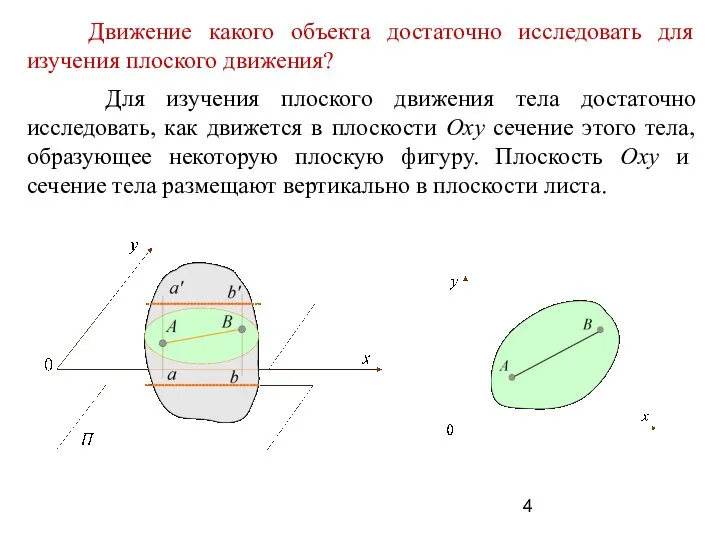
Для изучения плоского движения тела достаточно исследовать, как движется в
Для изучения плоского движения тела достаточно исследовать, как движется в
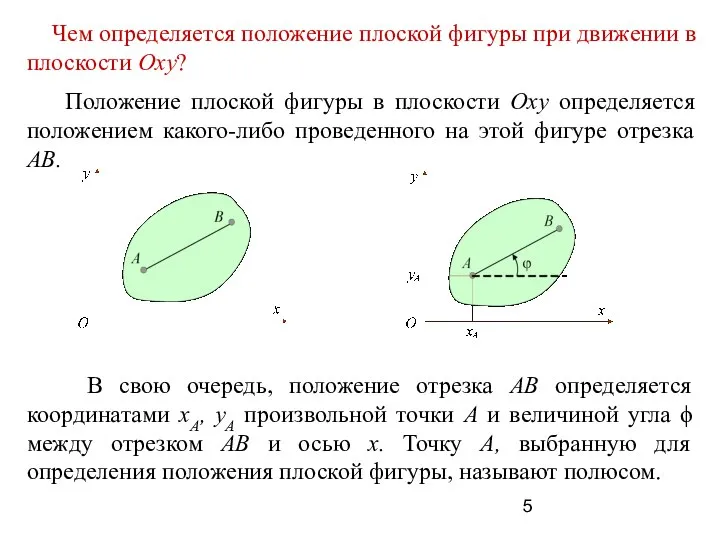
Чем определяется положение плоской фигуры при движении в плоскости Oxy?
Чем определяется положение плоской фигуры при движении в плоскости Oxy?
Закон движения плоской фигуры в ее плоскости, а следова-тельно, и
Закон движения плоской фигуры в ее плоскости, а следова-тельно, и
Назовите основные кинематические характеристики плоского движения тела?
Какая точка выбирается
Назовите основные кинематические характеристики плоского движения тела?
Какая точка выбирается
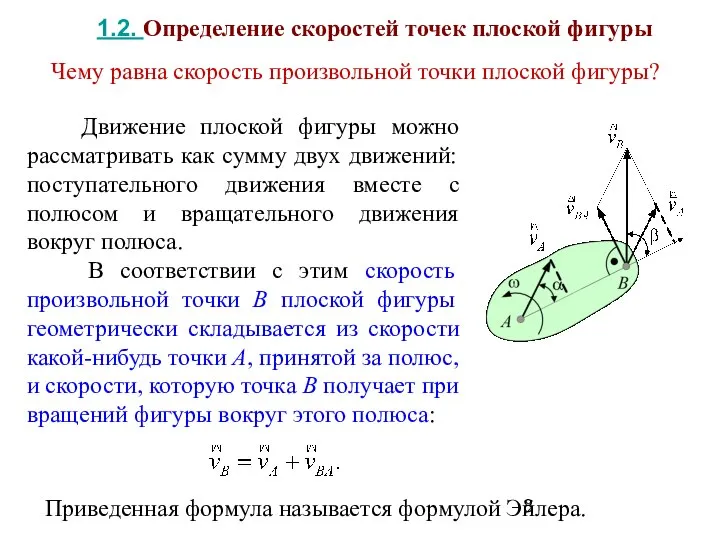
Движение плоской фигуры можно рассматривать как сумму двух движений: поступательного
Движение плоской фигуры можно рассматривать как сумму двух движений: поступательного
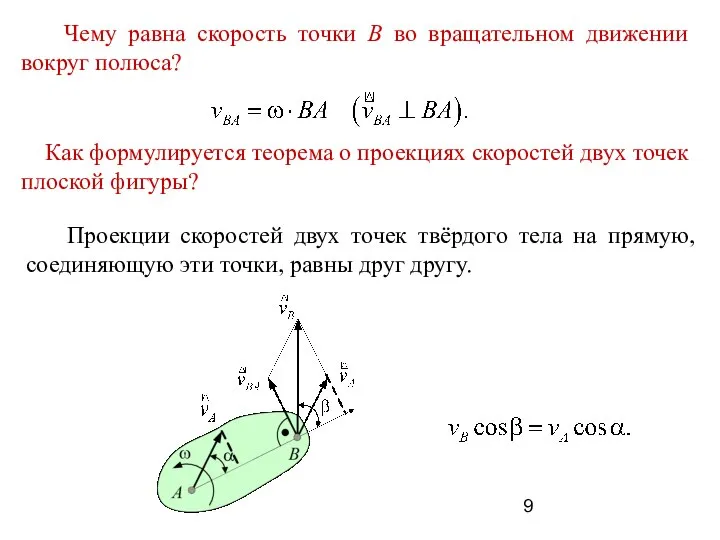
Чему равна скорость точки B во вращательном движении вокруг полюса?
Чему равна скорость точки B во вращательном движении вокруг полюса?
Что называется мгновенным центром скоростей?
Точка плоской фигуры, скорость которой
Что называется мгновенным центром скоростей?
Точка плоской фигуры, скорость которой
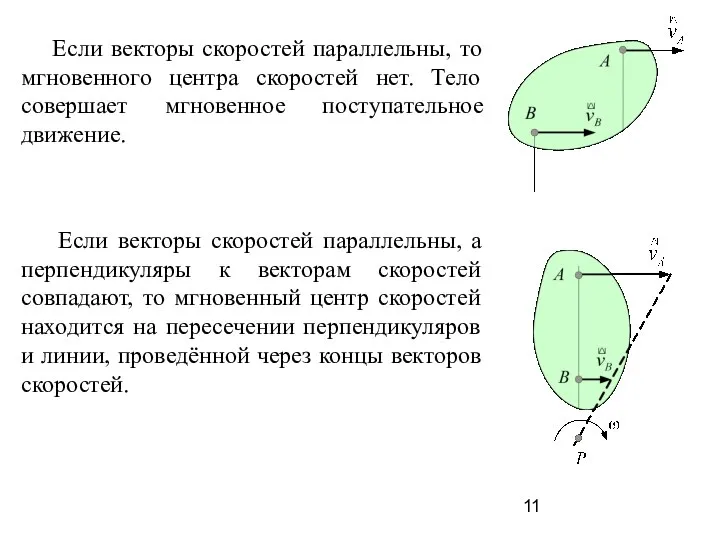
Если векторы скоростей параллельны, то мгновенного центра скоростей нет. Тело
Если векторы скоростей параллельны, то мгновенного центра скоростей нет. Тело
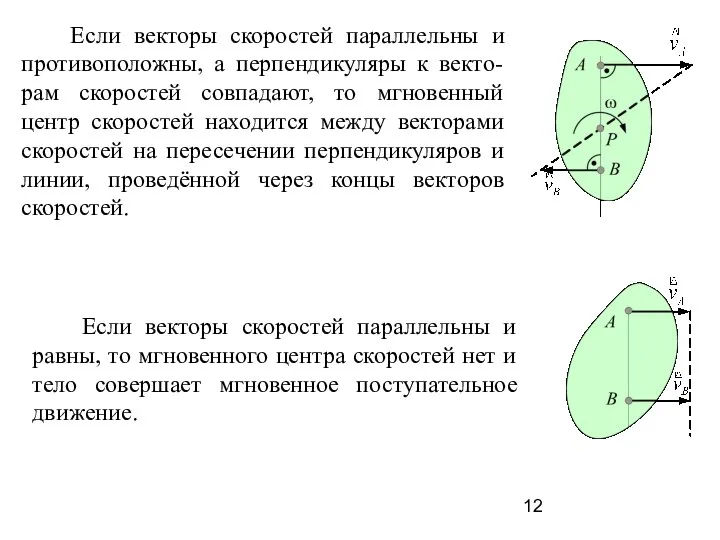
Если векторы скоростей параллельны и противоположны, а перпендикуляры к векто-рам
Если векторы скоростей параллельны и противоположны, а перпендикуляры к векто-рам
Пример 1
2. Решение задач
Пример 1
2. Решение задач
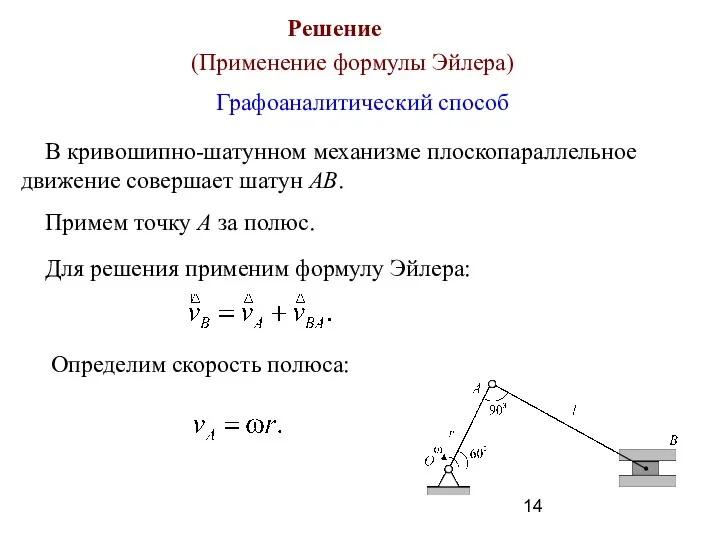
Решение
(Применение формулы Эйлера)
В кривошипно-шатунном механизме плоскопараллельное движение совершает шатун
Решение
(Применение формулы Эйлера)
В кривошипно-шатунном механизме плоскопараллельное движение совершает шатун
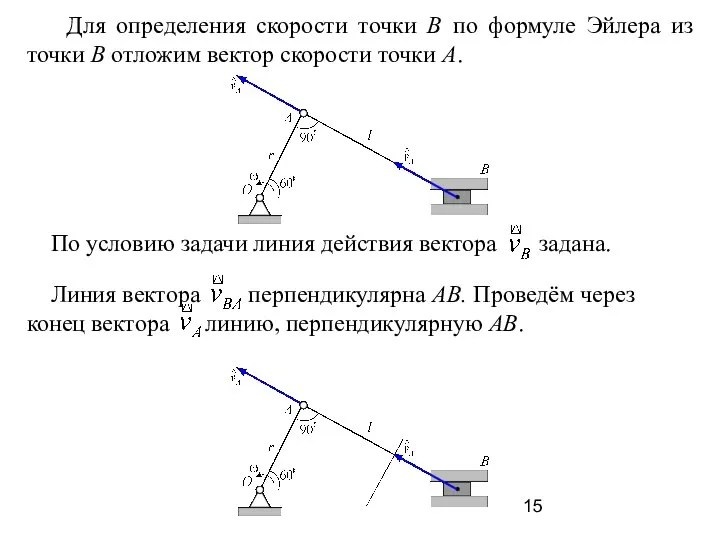
Для определения скорости точки В по формуле Эйлера из точки
Для определения скорости точки В по формуле Эйлера из точки
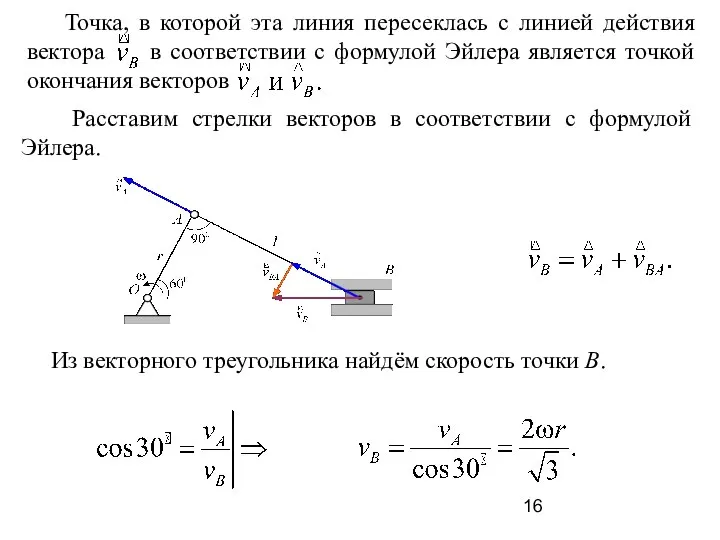
Расставим стрелки векторов в соответствии с формулой Эйлера.
Из векторного
Расставим стрелки векторов в соответствии с формулой Эйлера.
Из векторного
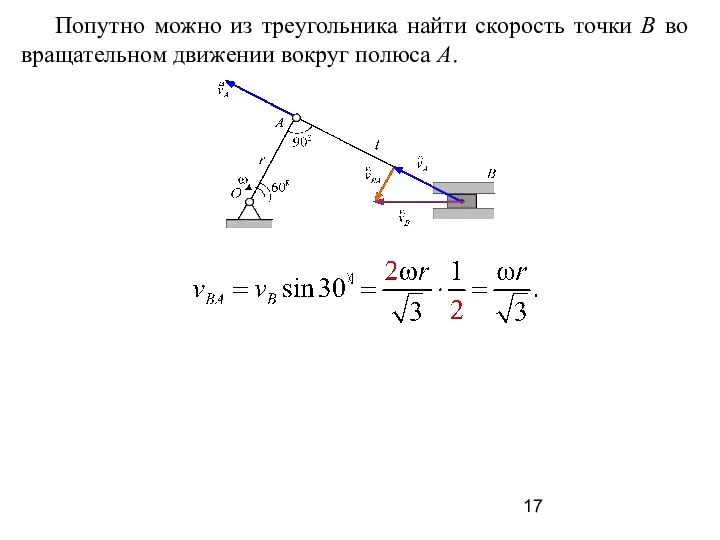
Попутно можно из треугольника найти скорость точки В во вращательном
Попутно можно из треугольника найти скорость точки В во вращательном
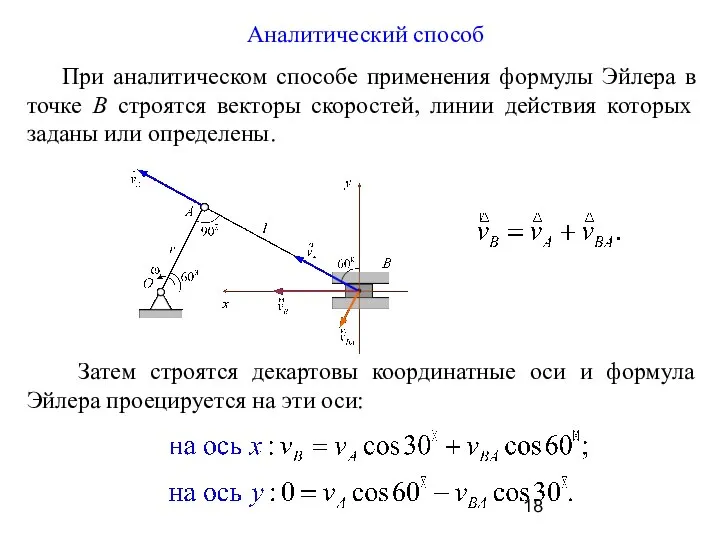
Аналитический способ
При аналитическом способе применения формулы Эйлера в
Аналитический способ
При аналитическом способе применения формулы Эйлера в
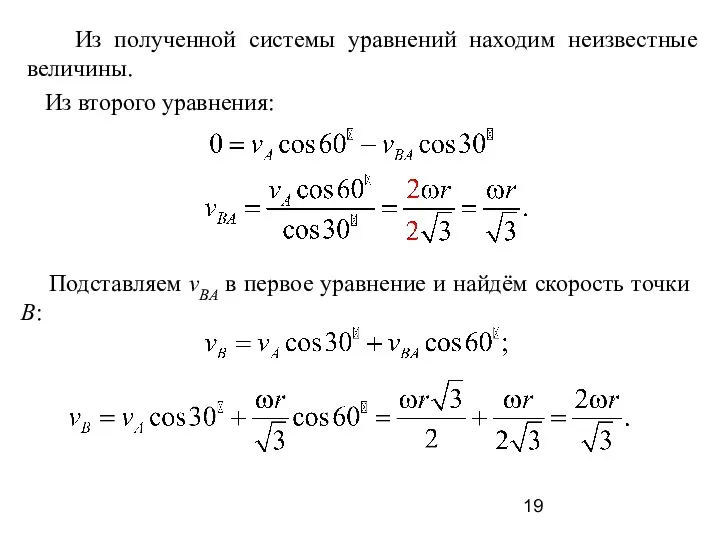
Из полученной системы уравнений находим неизвестные величины.
Из второго уравнения:
Из полученной системы уравнений находим неизвестные величины.
Из второго уравнения:
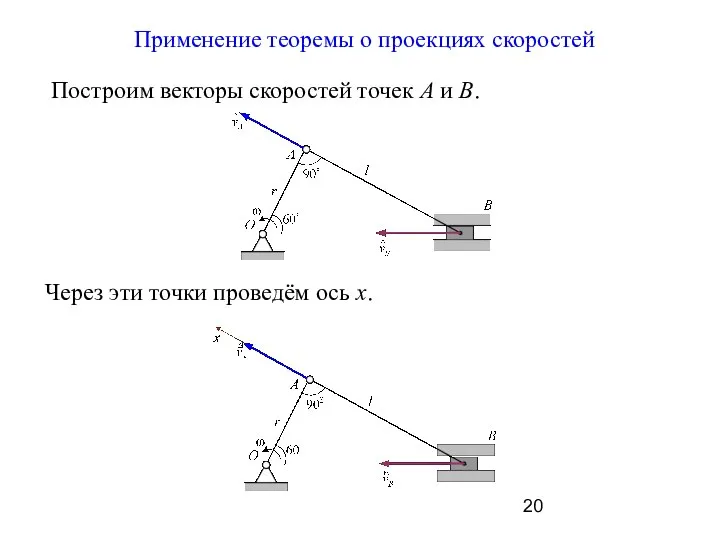
Применение теоремы о проекциях скоростей
Построим векторы скоростей точек А и
Применение теоремы о проекциях скоростей
Построим векторы скоростей точек А и
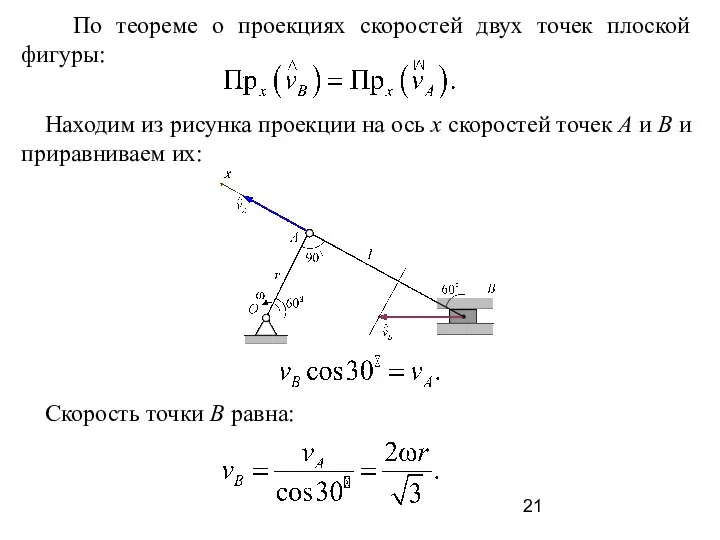
По теореме о проекциях скоростей двух точек плоской фигуры:
Находим
По теореме о проекциях скоростей двух точек плоской фигуры:
Находим
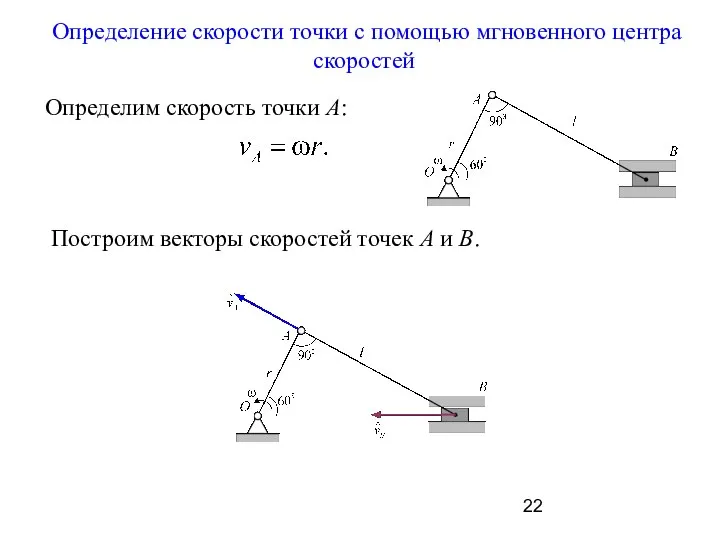
Определение скорости точки с помощью мгновенного центра скоростей
Определим скорость
Определение скорости точки с помощью мгновенного центра скоростей
Определим скорость
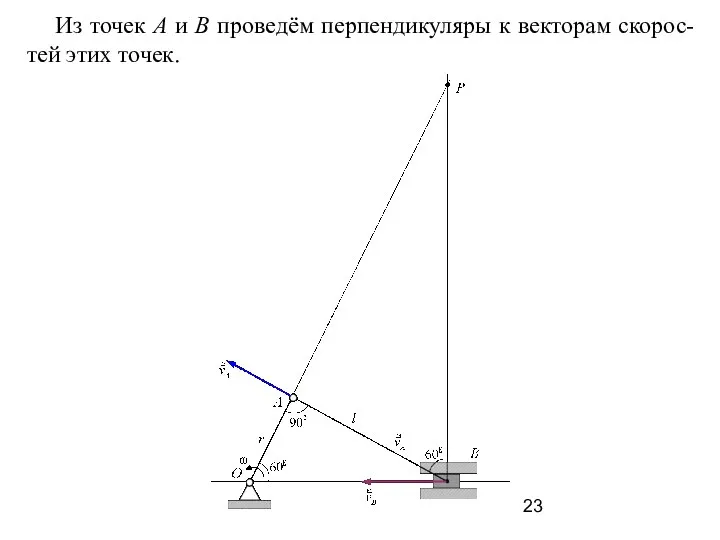
Из точек А и В проведём перпендикуляры к векторам скорос-тей
Из точек А и В проведём перпендикуляры к векторам скорос-тей
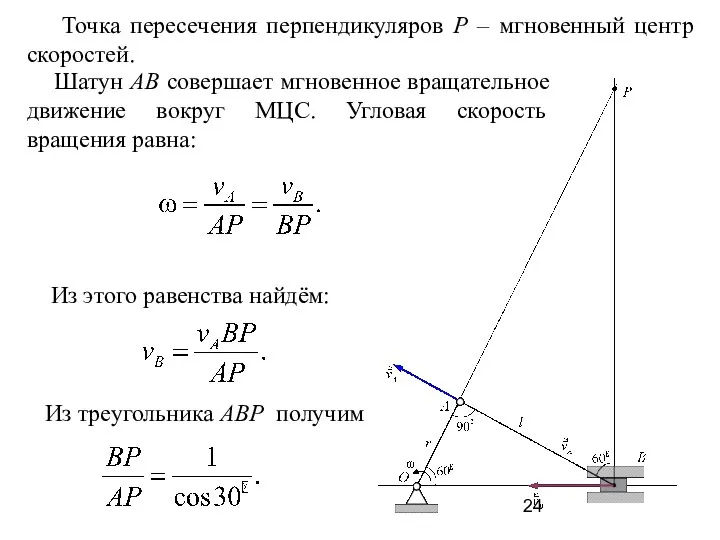
Точка пересечения перпендикуляров Р – мгновенный центр скоростей.
Шатун
Точка пересечения перпендикуляров Р – мгновенный центр скоростей.
Шатун
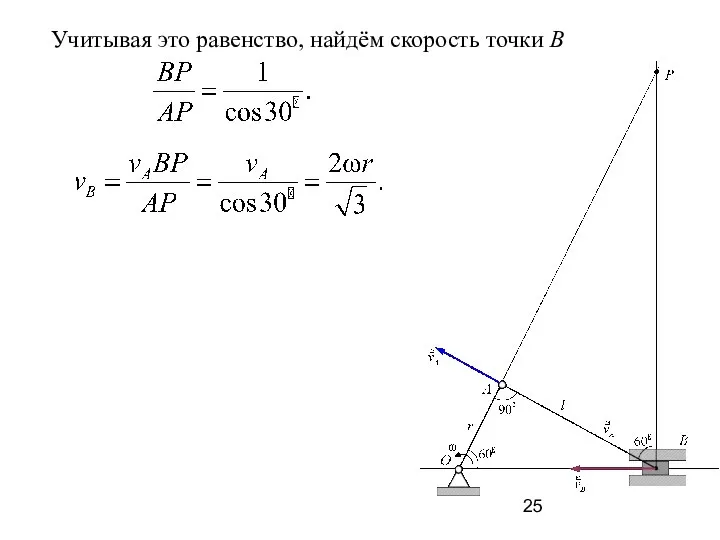
Учитывая это равенство, найдём скорость точки В
Учитывая это равенство, найдём скорость точки В
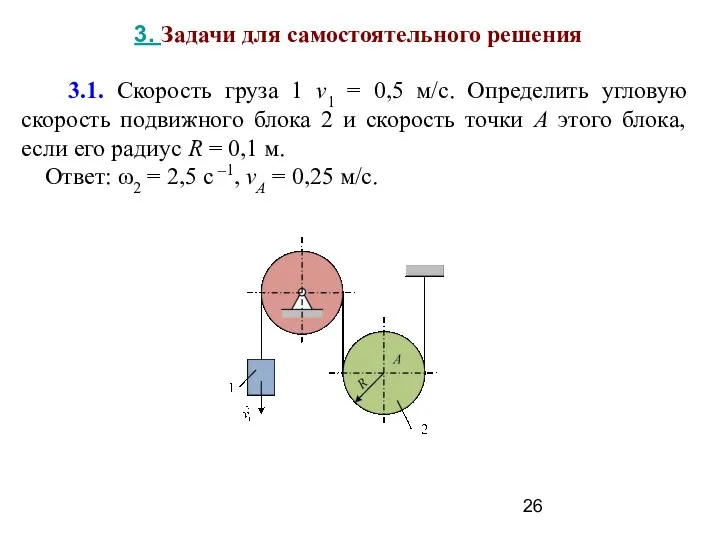
3.1. Скорость груза 1 v1 = 0,5 м/с. Определить угловую
3.1. Скорость груза 1 v1 = 0,5 м/с. Определить угловую
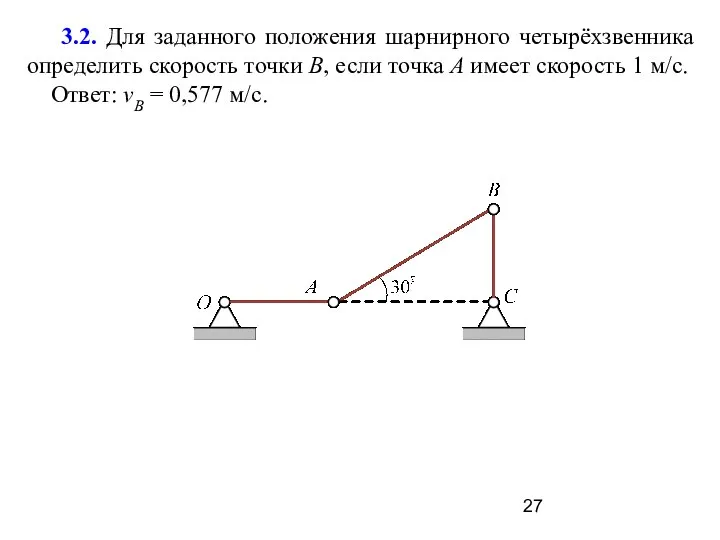
3.2. Для заданного положения шарнирного четырёхзвенника определить скорость точки В,
3.2. Для заданного положения шарнирного четырёхзвенника определить скорость точки В,

3.3. В дифференциальном механизме с внутренним зацеп-лением зубчатое колесо 1
3.3. В дифференциальном механизме с внутренним зацеп-лением зубчатое колесо 1
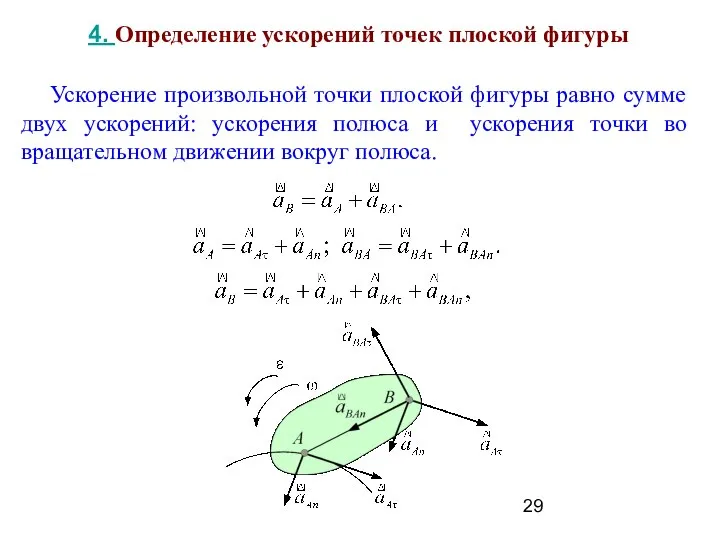
Ускорение произвольной точки плоской фигуры равно сумме двух ускорений: ускорения
Ускорение произвольной точки плоской фигуры равно сумме двух ускорений: ускорения
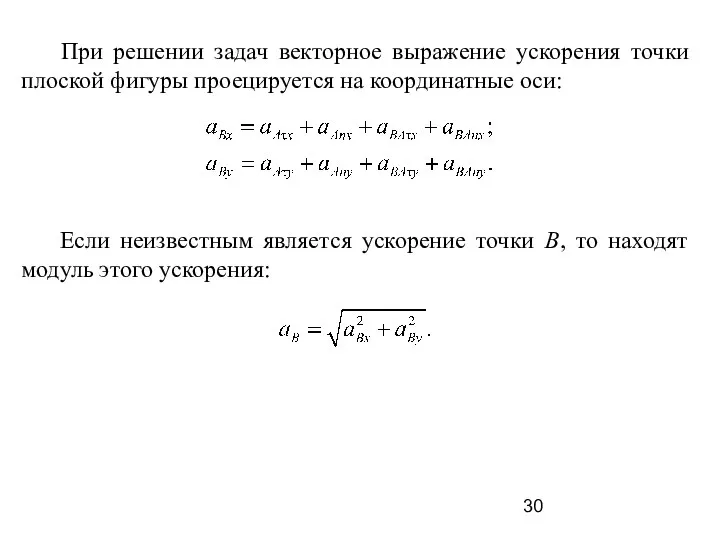
При решении задач векторное выражение ускорения точки плоской фигуры проецируется
При решении задач векторное выражение ускорения точки плоской фигуры проецируется
Пример 2
Центр катящегося по плоскости колеса радиуса 0,5 м движется
Пример 2
Центр катящегося по плоскости колеса радиуса 0,5 м движется
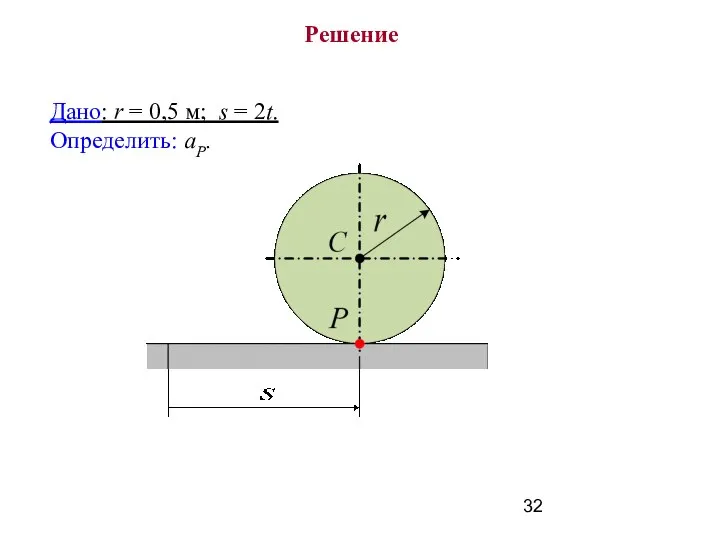
Дано: r = 0,5 м; s = 2t.
Определить:
Дано: r = 0,5 м; s = 2t.
Определить:
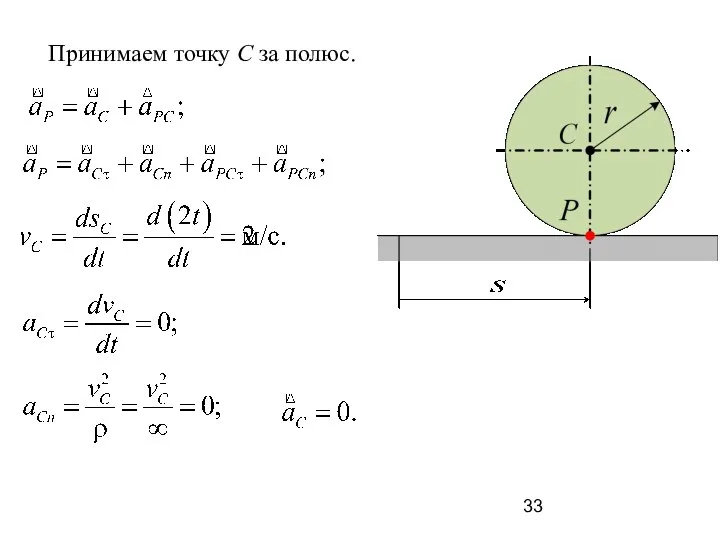
Принимаем точку С за полюс.
Принимаем точку С за полюс.
Пример 3
Стержень АВ длиной 2 м находится в плоскопараллельном движении.
Пример 3
Стержень АВ длиной 2 м находится в плоскопараллельном движении.
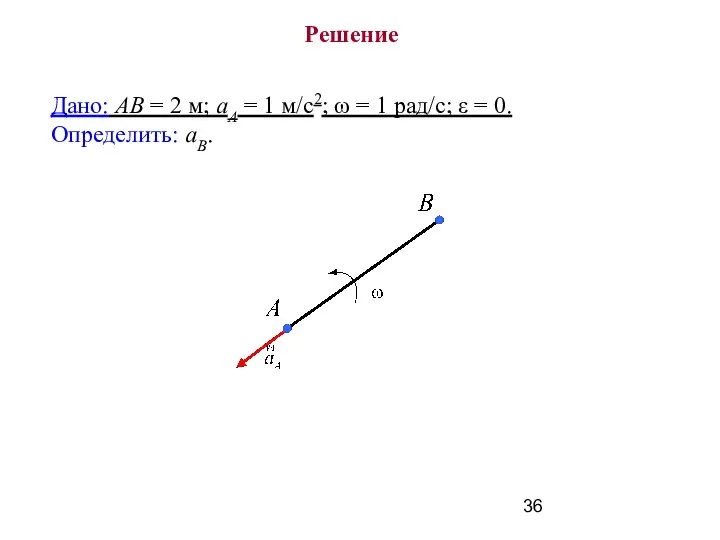
Дано: АВ = 2 м; аА = 1 м/с2; ω
Дано: АВ = 2 м; аА = 1 м/с2; ω
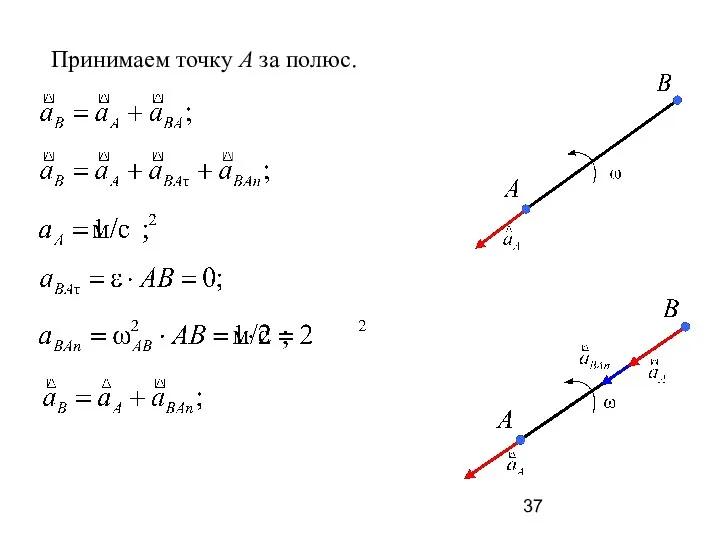
Принимаем точку A за полюс.
Принимаем точку A за полюс.
Пример 4
Стержень АВ движется в плоскости. Ускорение точки А в
Пример 4
Стержень АВ движется в плоскости. Ускорение точки А в
Дано: аА = 1 м/с2, ω = 2 рад/с, ε
Дано: аА = 1 м/с2, ω = 2 рад/с, ε
Принимаем точку A за полюс.
Принимаем точку A за полюс.
Пример 5
Тело находится в плоскопараллельном движении. Найти уско-рение точки В,
Пример 5
Тело находится в плоскопараллельном движении. Найти уско-рение точки В,
Дано: аА = 3 м/с2; ω = 1 рад/с; ε
Дано: аА = 3 м/с2; ω = 1 рад/с; ε
Принимаем точку A за полюс.
Принимаем точку A за полюс.
Пример 6
Колесо катится без скольжения. Определить ускорение точки В в
Пример 6
Колесо катится без скольжения. Определить ускорение точки В в
Дано: колесо катится без скольжения; vА = 0; аА =
Дано: колесо катится без скольжения; vА = 0; аА =
Принимаем точку A за полюс.
Принимаем точку A за полюс.
Пример 7
Колесо радиуса r = 0,1 м катится без скольжения.
Пример 7
Колесо радиуса r = 0,1 м катится без скольжения.
Решение
Дано: r = 0,1 м; vА = 2 м/с. Колесо
Решение
Дано: r = 0,1 м; vА = 2 м/с. Колесо
Принимаем точку A за полюс.
Принимаем точку A за полюс.
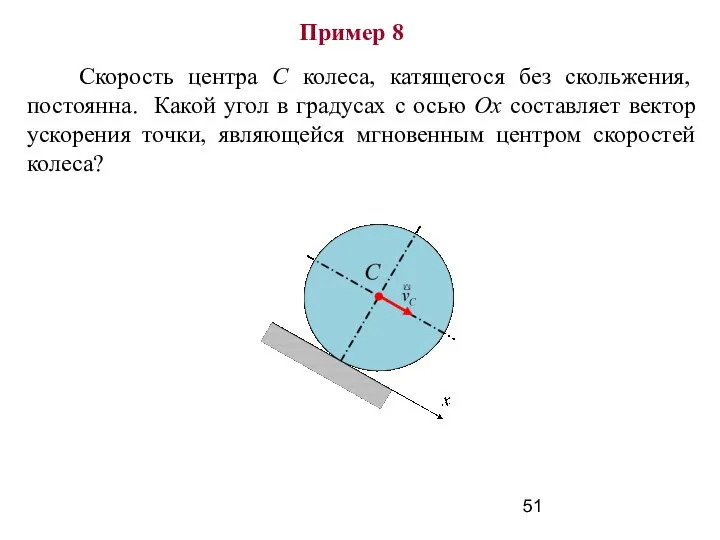
Пример 8
Скорость центра С колеса, катящегося без скольжения, постоянна. Какой
Пример 8
Скорость центра С колеса, катящегося без скольжения, постоянна. Какой
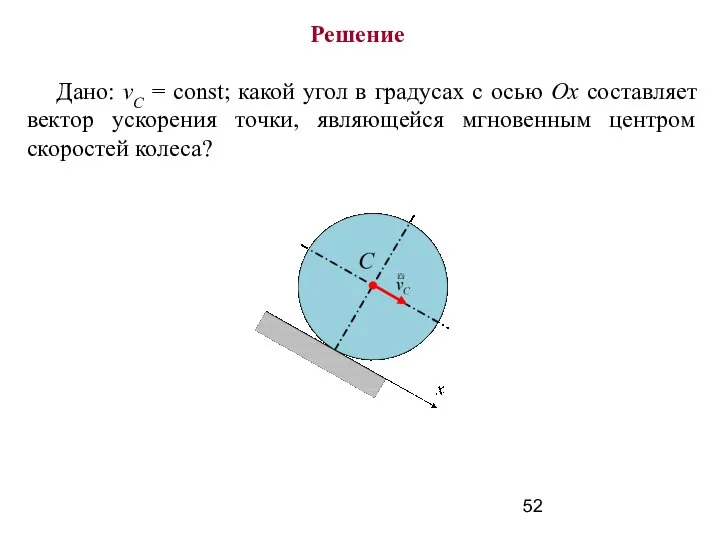
Решение
Дано: vС = const; какой угол в градусах с осью
Решение
Дано: vС = const; какой угол в градусах с осью
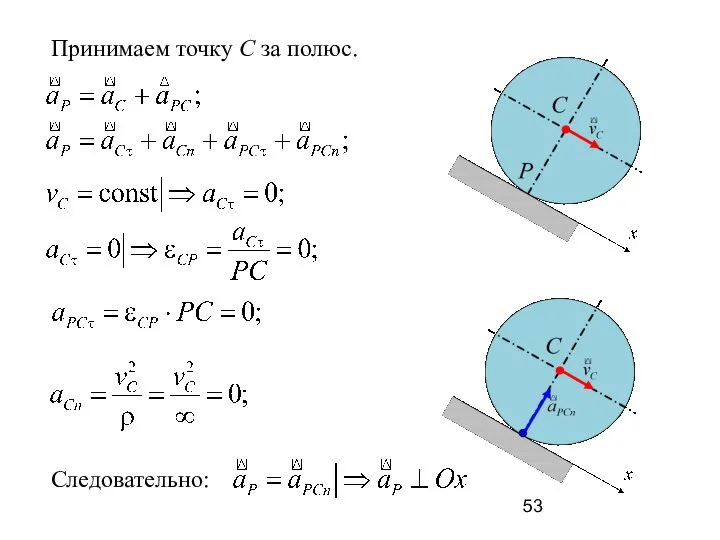
Принимаем точку С за полюс.
Следовательно:
Принимаем точку С за полюс.
Следовательно:
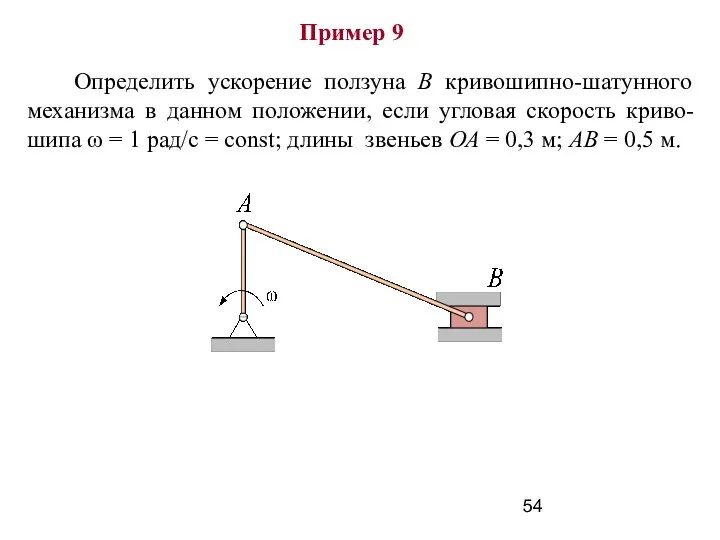
Пример 9
Определить ускорение ползуна В кривошипно-шатунного механизма в данном положении,
Пример 9
Определить ускорение ползуна В кривошипно-шатунного механизма в данном положении,
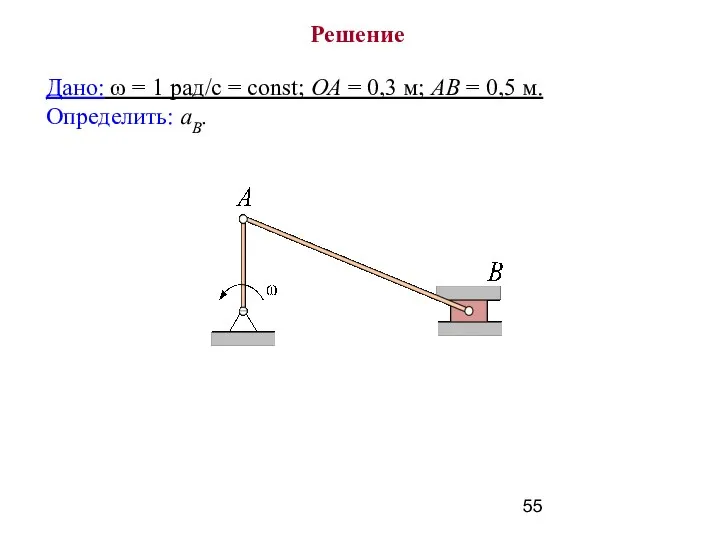
Дано: ω = 1 рад/с = const; ОА = 0,3
Дано: ω = 1 рад/с = const; ОА = 0,3
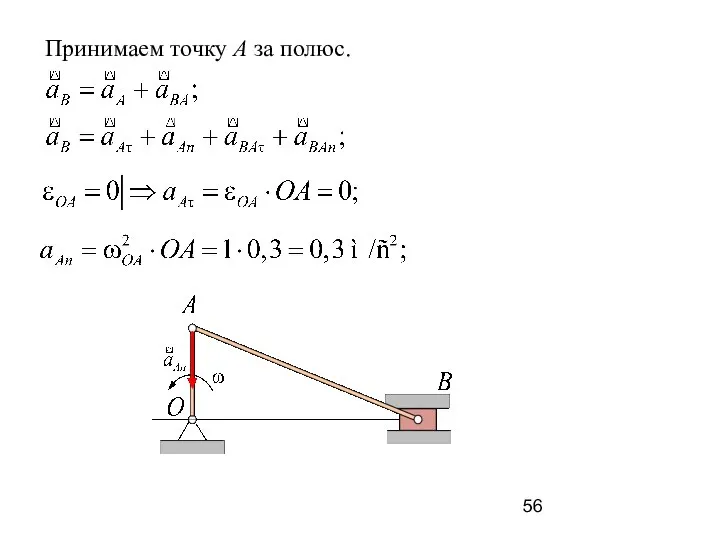
Принимаем точку A за полюс.
Принимаем точку A за полюс.
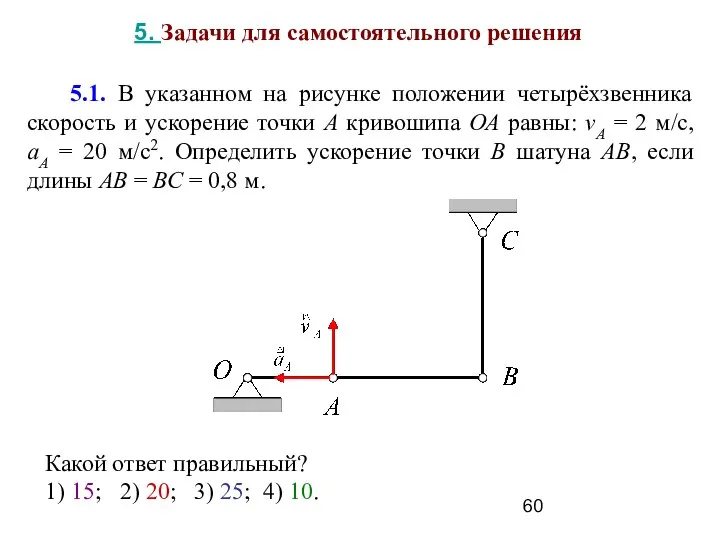
5.1. В указанном на рисунке положении четырёхзвенника скорость и ускорение
5.1. В указанном на рисунке положении четырёхзвенника скорость и ускорение
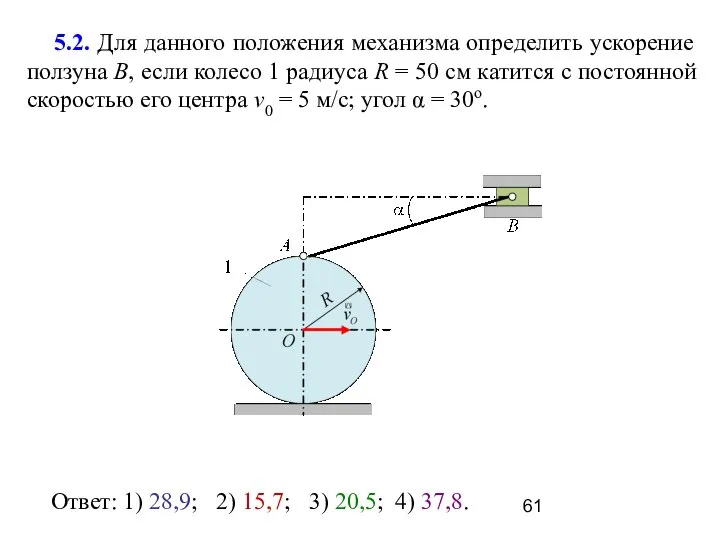
5.2. Для данного положения механизма определить ускорение ползуна В, если
5.2. Для данного положения механизма определить ускорение ползуна В, если
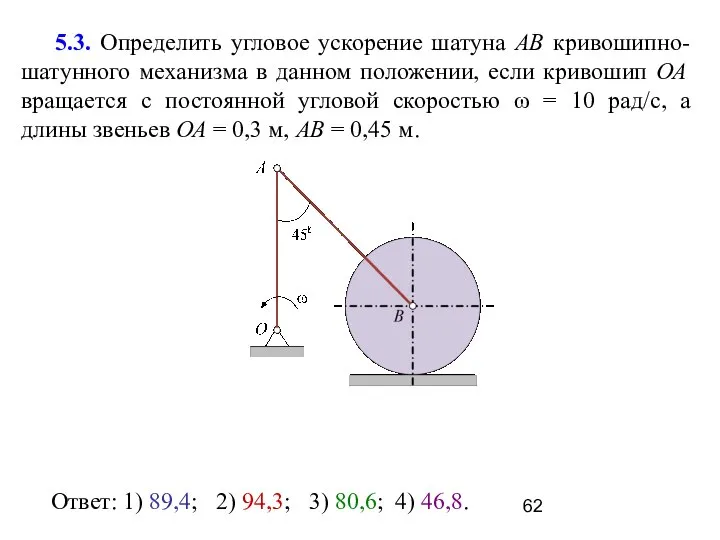
5.3. Определить угловое ускорение шатуна АВ кривошипно-шатунного механизма в данном
5.3. Определить угловое ускорение шатуна АВ кривошипно-шатунного механизма в данном
 Бумажная пластика - презентация для начальной школы
Бумажная пластика - презентация для начальной школы Издержки фирмы
Издержки фирмы Креативная парковая полоса
Креативная парковая полоса Культура Китая Выполнила Биер Анастасия ученица МОУ СОШ №13 10 класса
Культура Китая Выполнила Биер Анастасия ученица МОУ СОШ №13 10 класса Игры и развлечения на воде, применяемые на различных этапах обучения
Игры и развлечения на воде, применяемые на различных этапах обучения Презентация "Готический стиль" - скачать презентации по МХК
Презентация "Готический стиль" - скачать презентации по МХК Нормирование точности деталей вал и стакан цилиндрического двухступенчатого редуктора
Нормирование точности деталей вал и стакан цилиндрического двухступенчатого редуктора Загрязнения Каспийского моря нефтью и нефтепродуктами
Загрязнения Каспийского моря нефтью и нефтепродуктами Презентация на тему "Диагностика инновационного потенциала личности" - скачать презентации по Педагогике
Презентация на тему "Диагностика инновационного потенциала личности" - скачать презентации по Педагогике Разрезы (вырезы) на аксонометрических изображениях деталей. 8 класс
Разрезы (вырезы) на аксонометрических изображениях деталей. 8 класс Распространенные заболевания человека
Распространенные заболевания человека Тәулсіз қазақстанның сыртқы саясатының доктринасы
Тәулсіз қазақстанның сыртқы саясатының доктринасы Кривошипно-шатунный механизм
Кривошипно-шатунный механизм Сучасне теплове обладнання (Експрес-кавоварки)
Сучасне теплове обладнання (Експрес-кавоварки) Лекція 8. Українська культура другої половини XX століття
Лекція 8. Українська культура другої половини XX століття Історія української культури
Історія української культури Христианство. Распространение христианства в мире
Христианство. Распространение христианства в мире Существующие системы контроля технического состояния автосцепного устройства
Существующие системы контроля технического состояния автосцепного устройства Улан-Удэ, 2009. - презентация
Улан-Удэ, 2009. - презентация Резьба. Крепёжные изделия
Резьба. Крепёжные изделия КОВАЛЕВСКАЯ Софья Васильевна (1850-1891)
КОВАЛЕВСКАЯ Софья Васильевна (1850-1891) Турбо Паскаль
Турбо Паскаль Введение в религиоведение
Введение в религиоведение Разработка главных страниц и пользовательских элементов управления
Разработка главных страниц и пользовательских элементов управления Königsberger
Königsberger Проф. д-р Иван Козовски Управител на Медицински център за асистирана репродукция “Варна” ООД
Проф. д-р Иван Козовски Управител на Медицински център за асистирана репродукция “Варна” ООД Графические возможности яп VB
Графические возможности яп VB Композиционные и оксидные проводящие материалы
Композиционные и оксидные проводящие материалы