- ПРЕДМЕТ ТАУ

Содержание
- 2. Управление, осуществляемое без участия человека, называется автоматическим управлением. Предметом настоящей дисциплины является теория автоматического управления техническими
- 3. Рекомендуемая лиратура Основная: Коновалов Б.И., Лебедев Ю.М. Теория автоматического управления. Учебное пособие. Томский ун-т систем управления
- 4. Дополнительная: 1. Попов Е.П. Теория линейных систем автоматического регулирования и управления. – М.: Наука, 1989. −
- 5. КЛАССИФИКАЦИЯ САУ ОУ – объект управления; УУ – управляющее устройство (регулятор) Y – выходная величина, характеризующая
- 6. X – управляющее воздействие; G – задающее воздействие; F – возмущающее воздействие. В зависимости от наличия
- 7. В разомкнутых САУ нет контроля за состоянием объекта, в них отсутствует связь между выходом объекта и
- 8. Если УУ измеряет возмущающее воздействие F, то управление осуществляется по возмущающему воздействию и имеет место управление
- 9. Система будет нелинейной, если в ее составе будет хотя бы одно нелинейное звено, описываемое нелинейными уравнениями.
- 10. САУ с гармоническим модулированным сигналом содержит элементы, в которых входной и выходной величиной является переменное напряжение
- 11. Стационарной называется система, все параметры которой не изменяются во времени. Нестационарная система - это система с
- 12. По цели управления различают системы стабилизации; системы программного управления; следящие системы. Системы стабилизации характеризуются неизменностью задающего
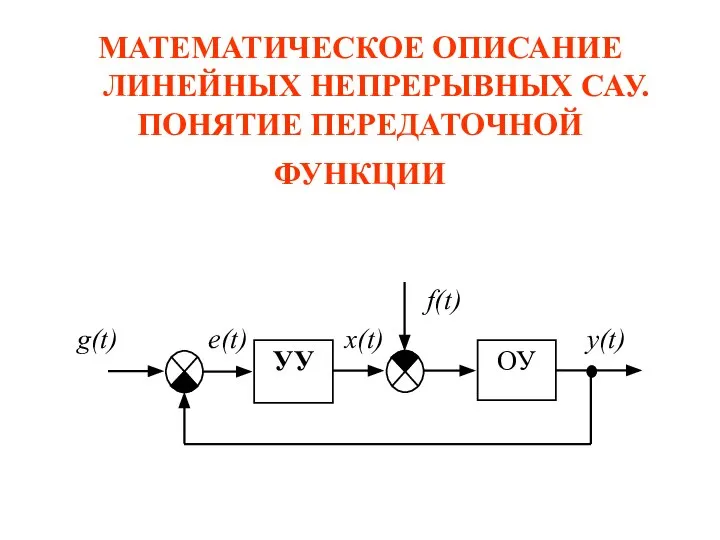
- 13. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САУ. ПОНЯТИЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ f(t) g(t) e(t) x(t) y(t)
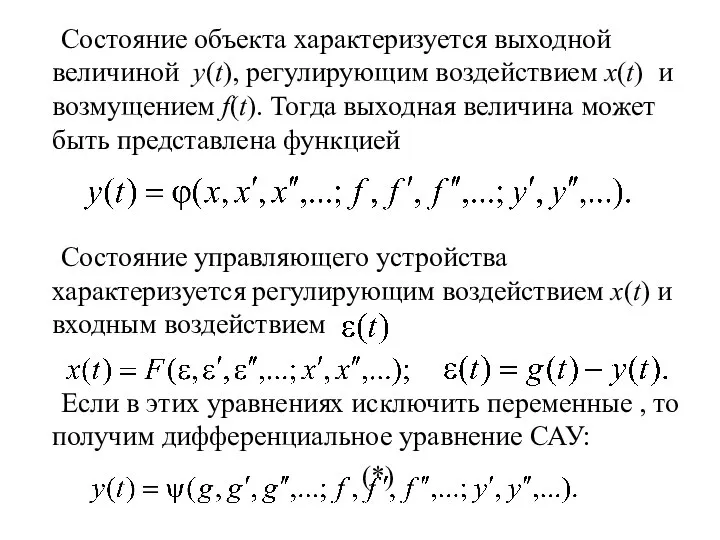
- 14. Состояние объекта характеризуется выходной величиной y(t), регулирующим воздействием x(t) и возмущением f(t). Тогда выходная величина может
- 15. Уравнение (*) описывает поведение системы во времени, определяет переходные процессы и обычно называется уравнением динамики. Возьмем
- 17. Скачать презентацию
Управление, осуществляемое без участия человека, называется автоматическим управлением. Предметом настоящей
Управление, осуществляемое без участия человека, называется автоматическим управлением. Предметом настоящей
Рекомендуемая лиратура
Основная:
Коновалов Б.И., Лебедев Ю.М. Теория автоматического управления. Учебное пособие. Томский
Рекомендуемая лиратура
Основная:
Коновалов Б.И., Лебедев Ю.М. Теория автоматического управления. Учебное пособие. Томский
Дополнительная:
1. Попов Е.П. Теория линейных систем автоматического регулирования и управления. –
Дополнительная:
1. Попов Е.П. Теория линейных систем автоматического регулирования и управления. –

КЛАССИФИКАЦИЯ САУ
ОУ – объект управления;
УУ – управляющее устройство (регулятор)
Y –
КЛАССИФИКАЦИЯ САУ
ОУ – объект управления;
УУ – управляющее устройство (регулятор)
Y –
X – управляющее воздействие;
G – задающее воздействие;
F – возмущающее воздействие.
В зависимости
X – управляющее воздействие;
G – задающее воздействие;
F – возмущающее воздействие.
В зависимости
В разомкнутых САУ нет контроля за состоянием объекта, в них отсутствует
В разомкнутых САУ нет контроля за состоянием объекта, в них отсутствует
Если УУ измеряет возмущающее воздействие F, то управление осуществляется по возмущающему
Если УУ измеряет возмущающее воздействие F, то управление осуществляется по возмущающему
Система будет нелинейной, если в ее составе будет хотя бы одно
Система будет нелинейной, если в ее составе будет хотя бы одно
САУ с гармоническим модулированным сигналом содержит элементы, в которых входной и
САУ с гармоническим модулированным сигналом содержит элементы, в которых входной и
Стационарной называется система, все параметры которой не изменяются во времени.
Нестационарная
Стационарной называется система, все параметры которой не изменяются во времени.
Нестационарная
По цели управления различают
системы стабилизации;
системы программного управления;
следящие системы.
Системы стабилизации характеризуются
По цели управления различают
системы стабилизации;
системы программного управления;
следящие системы.
Системы стабилизации характеризуются
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САУ. ПОНЯТИЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ
f(t)
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САУ. ПОНЯТИЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ
f(t)
Состояние объекта характеризуется выходной величиной y(t), регулирующим воздействием x(t) и возмущением
Состояние объекта характеризуется выходной величиной y(t), регулирующим воздействием x(t) и возмущением
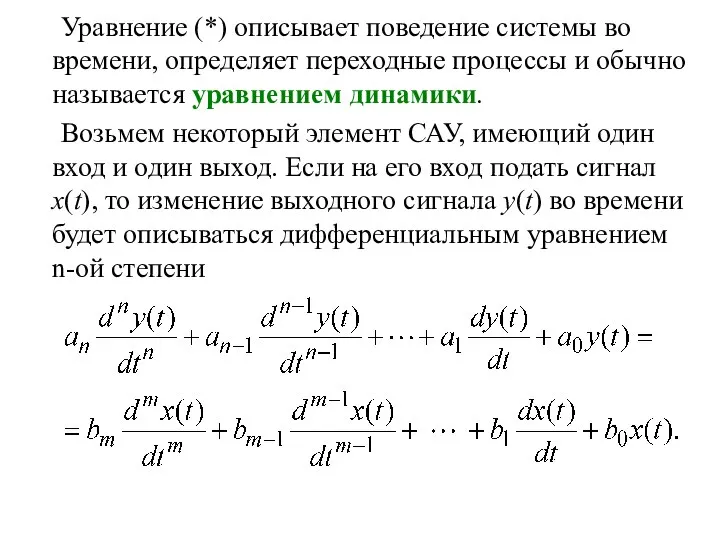
Уравнение (*) описывает поведение системы во времени, определяет переходные процессы и
Уравнение (*) описывает поведение системы во времени, определяет переходные процессы и
 Сравнение бензинового французского мотора и дизельного японского мотора с одинаковым объемом
Сравнение бензинового французского мотора и дизельного японского мотора с одинаковым объемом Азбука безопасности Внеклассное мероприятие Учитель начальных классов МБОУ «СОШ № 69» г. Кемерово Волкова Ирина Вик
Азбука безопасности Внеклассное мероприятие Учитель начальных классов МБОУ «СОШ № 69» г. Кемерово Волкова Ирина Вик Глюкокортикоиды
Глюкокортикоиды Плавание и методика преподавания. Основы спортивной тренировки. (Тема 1.5)
Плавание и методика преподавания. Основы спортивной тренировки. (Тема 1.5) Методы исследования ощущений Выполнил … Проверила …
Методы исследования ощущений Выполнил … Проверила … Презентация по алгебре Тригонометрические уравнения
Презентация по алгебре Тригонометрические уравнения  Функции в языке СИ. Лекция 5
Функции в языке СИ. Лекция 5 Причины возвышения Москвы
Причины возвышения Москвы Из истории развития дорожно-строительной техники
Из истории развития дорожно-строительной техники Оформление визы в Испанию
Оформление визы в Испанию Китайская чайная церемония
Китайская чайная церемония Показательные уравнения
Показательные уравнения Внешняя торговля России и проблемы ее развития.
Внешняя торговля России и проблемы ее развития. Презентация Этикет и социальный статус адресата
Презентация Этикет и социальный статус адресата Специализированные Учреждения ООН
Специализированные Учреждения ООН Презентация "Маньеризм" - скачать презентации по МХК
Презентация "Маньеризм" - скачать презентации по МХК Мемлекет және азаматтық қоғам
Мемлекет және азаматтық қоғам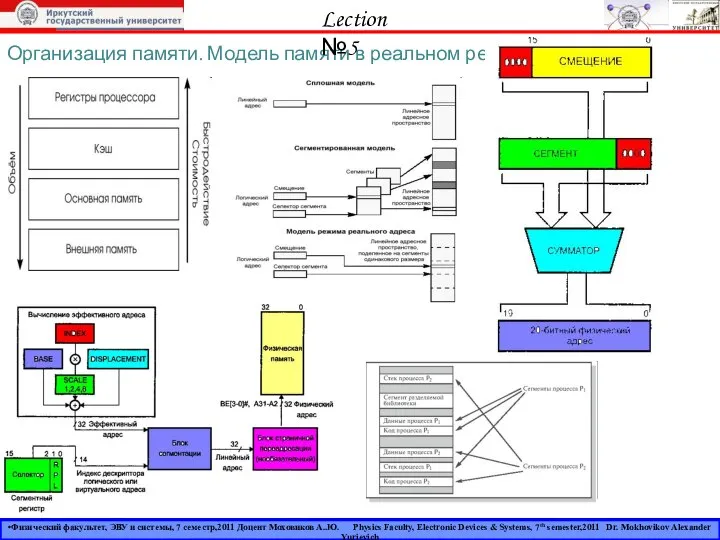 Организация памяти
Организация памяти Христианство и социальные проекты
Христианство и социальные проекты animals-and-their-youngs-conversation-topics-dialogs_118492
animals-and-their-youngs-conversation-topics-dialogs_118492 Презентация по МХК на тему Кельтская культура
Презентация по МХК на тему Кельтская культура  Презентация РЫНОК ЦЕННЫХ БУМАГ Общая характеристика ценных бумаг
Презентация РЫНОК ЦЕННЫХ БУМАГ Общая характеристика ценных бумаг Программирование на Java
Программирование на Java Конституционная юстиция
Конституционная юстиция Аттестационная работа. Собирание предметов крестьянского обихода
Аттестационная работа. Собирание предметов крестьянского обихода Индивидуальность личности
Индивидуальность личности Отечественная война 1812 года
Отечественная война 1812 года Алгоритм BlowFish
Алгоритм BlowFish