- Презентация

Содержание
- 2. Актуальность Широкое применение в технике военной медицинской авиационной и космической ядерной энергетике офисном оборудовании Определяющие требования
- 3. Актуальность Проблемами теории, расчёта, проектирования и исследований электропривода на базе синхронных машин с постоянными магнитами для
- 4. Цель и задачи Объект исследования - Шаговый электропривод с одноимённо-полюсными индукторными двигателями с постоянными магнитами на
- 5. Цель и задачи Задачи: 1. Создание методики и алгоритма проектирования одноимённо-полюсных индукторных двигателей с постоянными магнитами
- 6. Научная новизна 1. Впервые разработана методика проектирования одноимённо-полюсных индукторных двигателей с учётом момента инерции подвижных масс
- 7. Практическая ценность Обоснование и разработка математических моделей, которые позволяют: 1. Выполнять проектирование одноимённо-полюсных индукторных двигателей с
- 8. На защиту выносятся: 1. Методика проектирования одноимённо-полюсного индукторного двигателя, в которой учитывается момент инерции подвижных масс
- 9. Актуальность
- 10. Актуальность
- 11. Методика проектирования одноимённо-полюсного индукторного двигателя Постоянная Арнольда Зависимость отношение P/Ω от М , где – длина
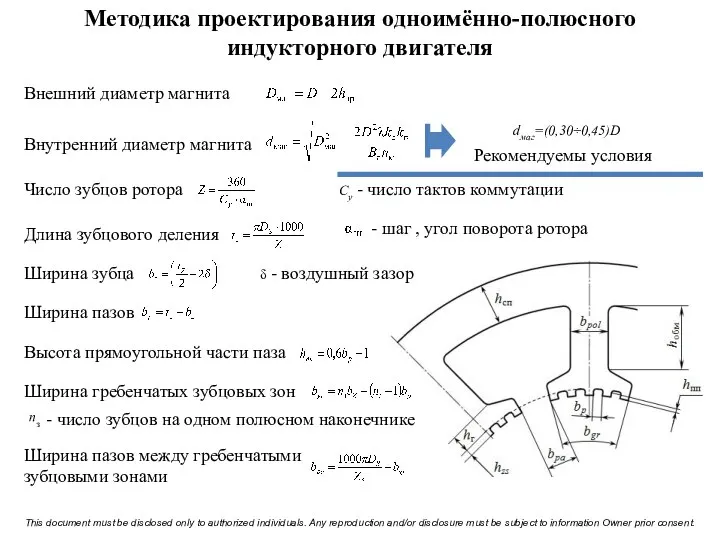
- 12. Методика проектирования одноимённо-полюсного индукторного двигателя Внешний диаметр магнита Внутренний диаметр магнита dмаг=(0,30÷0,45)D Рекомендуемы условия Ширина зубца
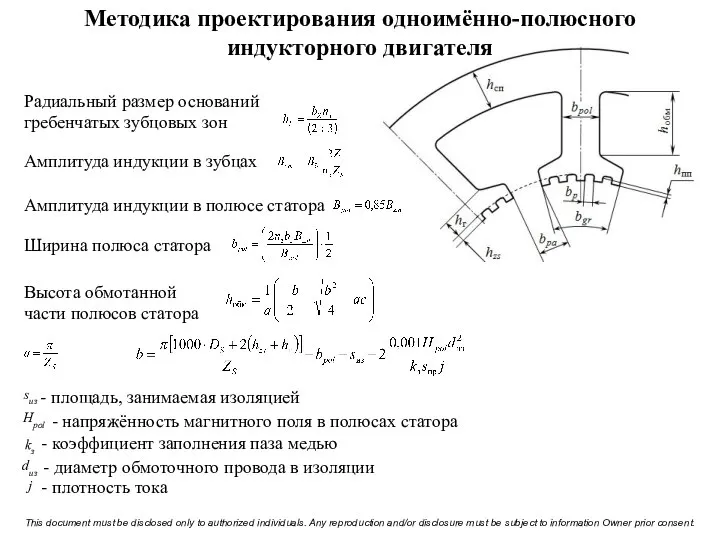
- 13. Методика проектирования одноимённо-полюсного индукторного двигателя Радиальный размер оснований гребенчатых зубцовых зон Амплитуда индукции в зубцах Амплитуда
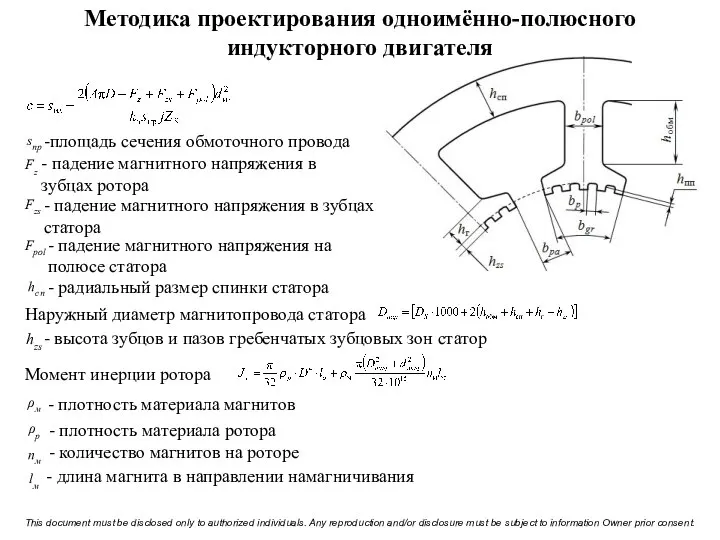
- 14. Методика проектирования одноимённо-полюсного индукторного двигателя sпр -площадь сечения обмоточного провода - падение магнитного напряжения в зубцах
- 15. Методика проектирования одноимённо-полюсного индукторного двигателя Частота приемистости при идеальном холостом ходе Угловая скорость вращения при идеальном
- 16. Актуальность
- 17. Актуальность
- 18. Актуальность
- 19. Актуальность
- 20. Актуальность
- 21. Актуальность
- 22. Актуальность
- 23. Актуальность
- 24. Актуальность
- 25. Актуальность
- 26. Оптимизационные расчеты электродвигателей в составе шагового электропривода Целью оптимизации поставлено достижение одного из следующих результатов: -
- 27. Оптимизационные расчеты электродвигателей в составе шагового электропривода
- 28. Оптимизационные расчеты электродвигателей в составе шагового электропривода
- 29. Основные результаты работы 1. Разработаны методика и алгоритм проектирования одноимённо-полюсных индукторных электромеханических преобразователей (двигателей) индукторного типа
- 31. Скачать презентацию
Актуальность
Широкое применение в технике
военной
медицинской
авиационной и космической
ядерной энергетике
офисном оборудовании
Определяющие требования
необходимость сохранения
Актуальность
Широкое применение в технике
военной
медицинской
авиационной и космической
ядерной энергетике
офисном оборудовании
Определяющие требования
необходимость сохранения
Актуальность
Проблемами теории, расчёта, проектирования и исследований электропривода на базе синхронных машин
Актуальность
Проблемами теории, расчёта, проектирования и исследований электропривода на базе синхронных машин
Цель и задачи
Объект исследования -
Шаговый электропривод с одноимённо-полюсными индукторными двигателями с
Цель и задачи
Объект исследования -
Шаговый электропривод с одноимённо-полюсными индукторными двигателями с
Цель и задачи
Задачи:
1. Создание методики и алгоритма проектирования одноимённо-полюсных индукторных двигателей
Цель и задачи
Задачи:
1. Создание методики и алгоритма проектирования одноимённо-полюсных индукторных двигателей
Научная новизна
1. Впервые разработана методика проектирования одноимённо-полюсных индукторных двигателей с учётом
Научная новизна
1. Впервые разработана методика проектирования одноимённо-полюсных индукторных двигателей с учётом
Практическая ценность
Обоснование и разработка математических моделей, которые позволяют:
1. Выполнять проектирование одноимённо-полюсных
Практическая ценность
Обоснование и разработка математических моделей, которые позволяют:
1. Выполнять проектирование одноимённо-полюсных
На защиту выносятся:
1. Методика проектирования одноимённо-полюсного индукторного двигателя, в которой учитывается
На защиту выносятся:
1. Методика проектирования одноимённо-полюсного индукторного двигателя, в которой учитывается
Актуальность
Актуальность
Актуальность
Актуальность

Методика проектирования одноимённо-полюсного индукторного двигателя
Постоянная Арнольда
Зависимость отношение P/Ω от М
,
Методика проектирования одноимённо-полюсного индукторного двигателя
Постоянная Арнольда
Зависимость отношение P/Ω от М
,
Методика проектирования одноимённо-полюсного индукторного двигателя
Внешний диаметр магнита
Внутренний диаметр магнита
dмаг=(0,30÷0,45)D
Рекомендуемы условия
Ширина зубца
Число
Методика проектирования одноимённо-полюсного индукторного двигателя
Внешний диаметр магнита
Внутренний диаметр магнита
dмаг=(0,30÷0,45)D
Рекомендуемы условия
Ширина зубца
Число
Методика проектирования одноимённо-полюсного индукторного двигателя
Радиальный размер оснований гребенчатых зубцовых зон
Амплитуда индукции
Методика проектирования одноимённо-полюсного индукторного двигателя
Радиальный размер оснований гребенчатых зубцовых зон
Амплитуда индукции
Методика проектирования одноимённо-полюсного индукторного двигателя
sпр
-площадь сечения обмоточного провода
- падение магнитного напряжения
Методика проектирования одноимённо-полюсного индукторного двигателя
sпр
-площадь сечения обмоточного провода
- падение магнитного напряжения
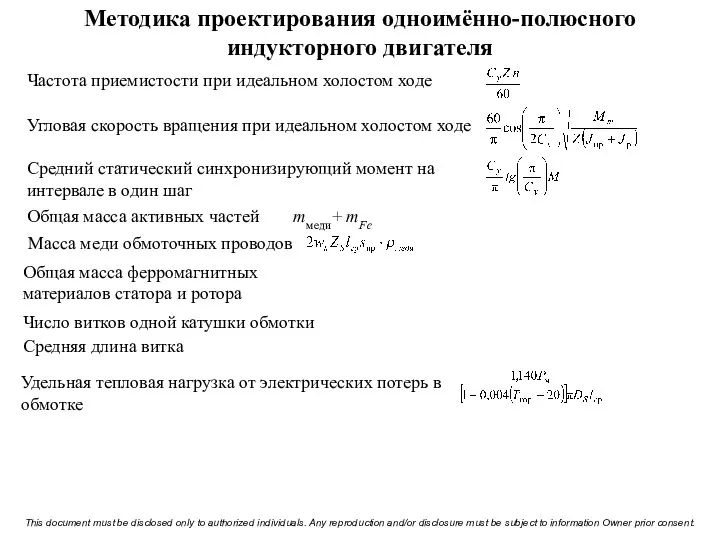
Методика проектирования одноимённо-полюсного индукторного двигателя
Частота приемистости при идеальном холостом ходе
Угловая скорость
Методика проектирования одноимённо-полюсного индукторного двигателя
Частота приемистости при идеальном холостом ходе
Угловая скорость
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Актуальность
Оптимизационные расчеты электродвигателей в составе шагового электропривода
Целью оптимизации поставлено достижение одного
Оптимизационные расчеты электродвигателей в составе шагового электропривода
Целью оптимизации поставлено достижение одного
Оптимизационные расчеты электродвигателей в составе шагового электропривода
Оптимизационные расчеты электродвигателей в составе шагового электропривода
Оптимизационные расчеты электродвигателей в составе шагового электропривода
Оптимизационные расчеты электродвигателей в составе шагового электропривода
Основные результаты работы
1. Разработаны методика и алгоритм проектирования одноимённо-полюсных индукторных электромеханических
Основные результаты работы
1. Разработаны методика и алгоритм проектирования одноимённо-полюсных индукторных электромеханических
 Экологические проблемы Урала
Экологические проблемы Урала  Аттестационная работа. Соперничество старого и нового света и его отражение в литературе
Аттестационная работа. Соперничество старого и нового света и его отражение в литературе УРОК ПО АЛГЕБРЕ 9 КЛАСС ТЕМА: СТЕПЕНЬ С ЦЕЛЫМ ОТРИЦАТЕЛЬНЫМ ПОКАЗАТЕЛЕМ
УРОК ПО АЛГЕБРЕ 9 КЛАСС ТЕМА: СТЕПЕНЬ С ЦЕЛЫМ ОТРИЦАТЕЛЬНЫМ ПОКАЗАТЕЛЕМ  Easy access to embedded at SIM800(R)
Easy access to embedded at SIM800(R) Постуральный менеджмент. «Здоровое детство»
Постуральный менеджмент. «Здоровое детство» Презентация Налогообложение операций с ценными бумагами
Презентация Налогообложение операций с ценными бумагами Политический режим. Демократия
Политический режим. Демократия Многогранники геометрия 10-11 класс
Многогранники геометрия 10-11 класс Презентация на тему Молекулярные процессы синтеза у растений
Презентация на тему Молекулярные процессы синтеза у растений Мехатронные модули движения
Мехатронные модули движения Международное уголовное право
Международное уголовное право Политическая сфера
Политическая сфера Дарган мез
Дарган мез рисуем мальчика - презентация для начальной школы
рисуем мальчика - презентация для начальной школы Соединения. Классификация
Соединения. Классификация Федеральные государственные образовательные стандарты
Федеральные государственные образовательные стандарты  Антропогенное химическое загрязнение природной среды
Антропогенное химическое загрязнение природной среды Спортивная тренировка
Спортивная тренировка  Творчий проект «Переборні задачі Паскаль»
Творчий проект «Переборні задачі Паскаль» Презентация
Презентация Сельское хозяйство в России
Сельское хозяйство в России Презентация на тему: Жанры изобразительного искусства
Презентация на тему: Жанры изобразительного искусства буква с - презентация для начальной школы
буква с - презентация для начальной школы Мир византийской культуры Преподаватель истории Косарева Ирина Александровна МОУ Дивеевская СОШ С. Дивеево Нижегородской обла
Мир византийской культуры Преподаватель истории Косарева Ирина Александровна МОУ Дивеевская СОШ С. Дивеево Нижегородской обла Детско-юношеский отдых в регионах Татарстана. Лениногорский район
Детско-юношеский отдых в регионах Татарстана. Лениногорский район MICHELANGELO da CARAVAGGIO (1573-1610)
MICHELANGELO da CARAVAGGIO (1573-1610)  Древние образы, единство формы и декора в народных игрушках. Роспись дымковской игрушки
Древние образы, единство формы и декора в народных игрушках. Роспись дымковской игрушки Новосибирский государственный краеведческий музей
Новосибирский государственный краеведческий музей