- Расчет механических систем промышленного робота

Содержание
- 2. Ход работы Ознакомиться с предложенным в задании манипулятором ПР. Дать функциональную и структурную характеристику ПР. Выбрать
- 3. Функциональная схема ПР ПР включает в себя устройство управления 1 и манипулятор 2 – механическую часть
- 4. Пояснения к таблице исходных данных: Грузоподъемность – это масса груза в захватном устройстве. L1, L2, L3
- 5. Под таблицей исходных данных приведены значения характеристик материала звеньев манипулятора: допускаемого напряжения [σ], модуля нормальной упругости
- 6. Нельзя путать углы и знаки углов α и β. Правило знаков показано на кинематической схеме манипулятора
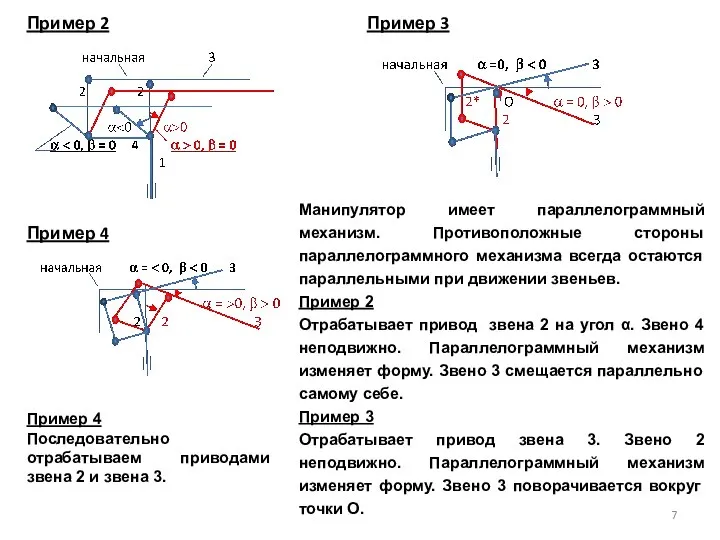
- 7. Пример 2 Пример 4 Пример 3 Манипулятор имеет параллелограммный механизм. Противоположные стороны параллелограммного механизма всегда остаются
- 8. Для заданной конфигурации манипулятора, строим расчетную схему для определения напряженного состояния. Это геометрически неизменяемая система в
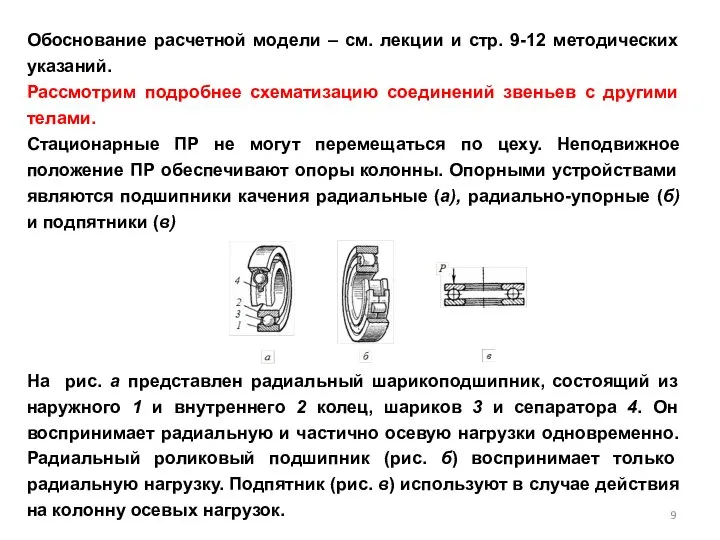
- 9. Обоснование расчетной модели – см. лекции и стр. 9-12 методических указаний. Рассмотрим подробнее схематизацию соединений звеньев
- 10. На рисунке показаны опоры колонны 2 манипулятора ПР: подпятник 3 и радиальный подшипник 1. Для обеспечения
- 11. Проведем оси координат так, как показано на рис. б. Ось х вдоль оси колонны. Оси y
- 12. Силы, действующие на звенья манипулятора, лежат в одной вертикальной плоскости. Поэтому реакции в опорах действуют в
- 13. ПОДГОТОВКА ДАННЫХ ДЛЯ РАСЧЕТА РАМНОЙ КОНСТРУКЦИИ МАНИПУЛЯТОРА См. файл «исходные данные RAMA» ЭТАП 1 Основой для
- 14. ЭТАП 3: Выбрать две системы координат (СК): общую и местную. ОБЩАЯ (ХOY) СК едина для всей
- 16. Скачать презентацию
Ход работы
Ознакомиться с предложенным в задании манипулятором ПР. Дать функциональную и
Ход работы
Ознакомиться с предложенным в задании манипулятором ПР. Дать функциональную и
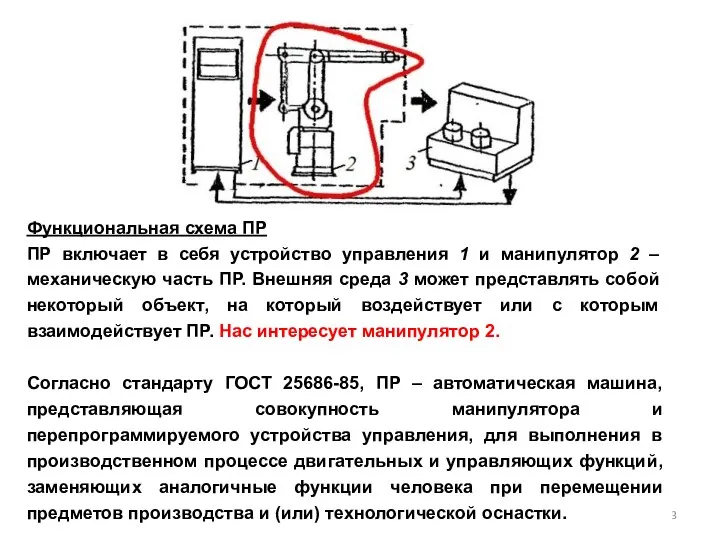
Функциональная схема ПР
ПР включает в себя устройство управления 1 и
Функциональная схема ПР
ПР включает в себя устройство управления 1 и
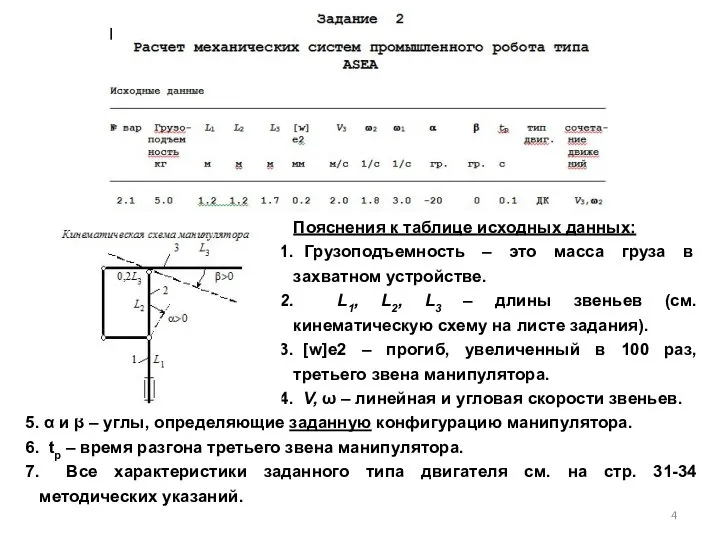
Пояснения к таблице исходных данных:
Грузоподъемность – это масса груза в
Пояснения к таблице исходных данных:
Грузоподъемность – это масса груза в
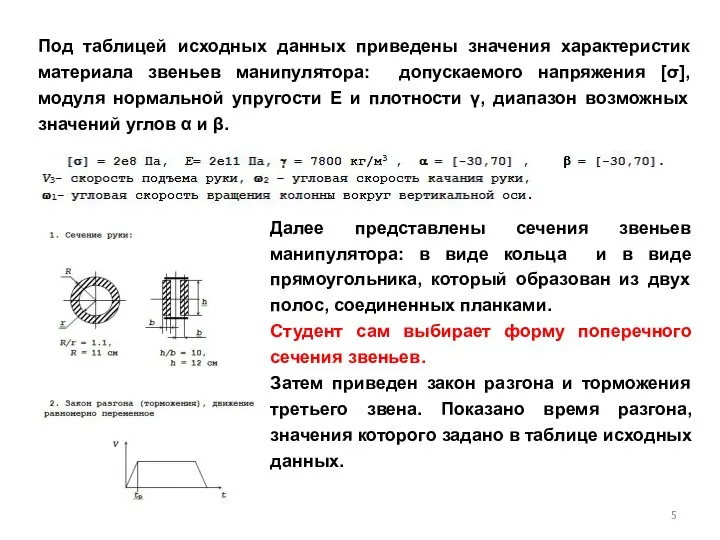
Под таблицей исходных данных приведены значения характеристик материала звеньев манипулятора: допускаемого
Под таблицей исходных данных приведены значения характеристик материала звеньев манипулятора: допускаемого
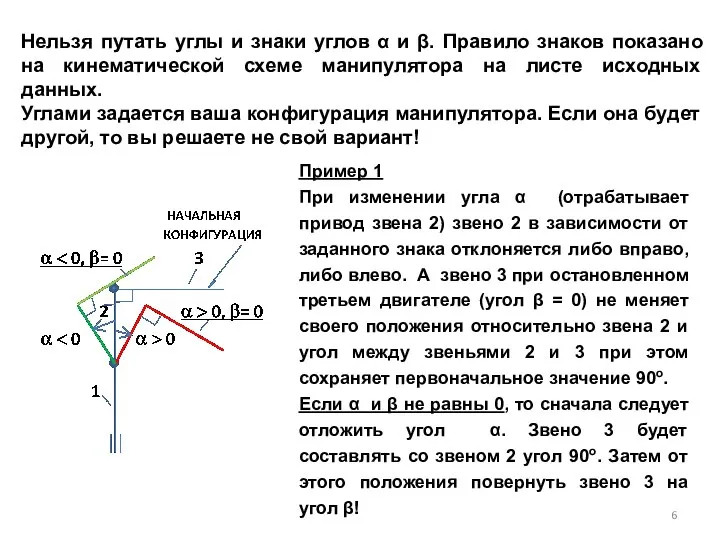
Нельзя путать углы и знаки углов α и β. Правило знаков
Нельзя путать углы и знаки углов α и β. Правило знаков
Пример 2
Пример 4
Пример 3
Манипулятор имеет параллелограммный механизм. Противоположные стороны параллелограммного механизма
Пример 2
Пример 4
Пример 3
Манипулятор имеет параллелограммный механизм. Противоположные стороны параллелограммного механизма
Для заданной конфигурации манипулятора, строим расчетную схему для определения напряженного состояния.
Для заданной конфигурации манипулятора, строим расчетную схему для определения напряженного состояния.
Обоснование расчетной модели – см. лекции и стр. 9-12 методических указаний.
Рассмотрим
Обоснование расчетной модели – см. лекции и стр. 9-12 методических указаний.
Рассмотрим
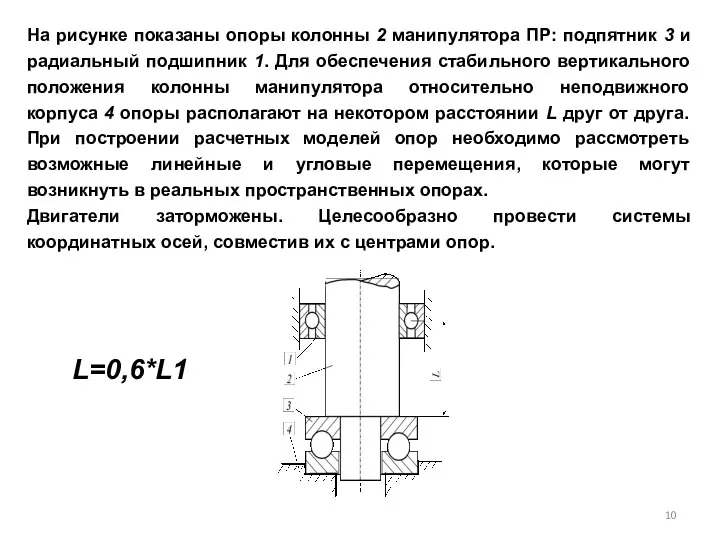
На рисунке показаны опоры колонны 2 манипулятора ПР: подпятник 3 и
На рисунке показаны опоры колонны 2 манипулятора ПР: подпятник 3 и
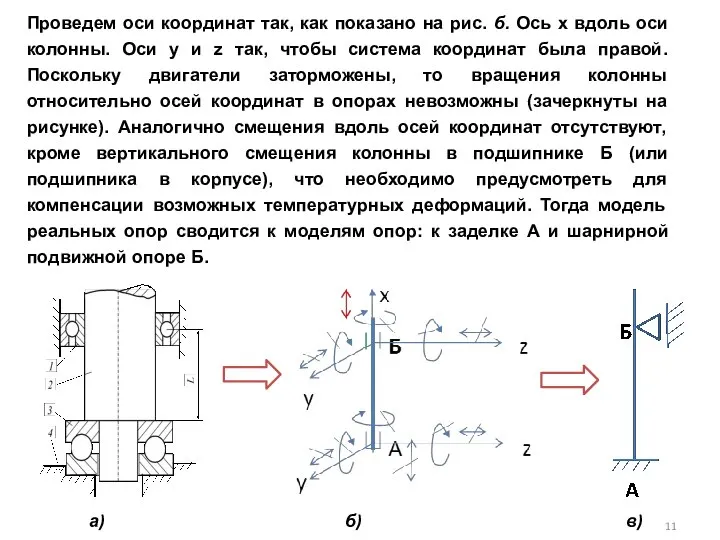
Проведем оси координат так, как показано на рис. б. Ось х
Проведем оси координат так, как показано на рис. б. Ось х
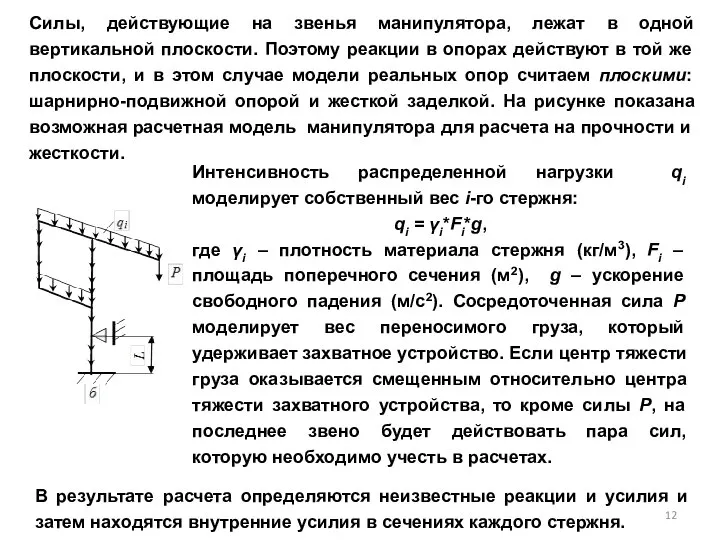
Силы, действующие на звенья манипулятора, лежат в одной вертикальной плоскости. Поэтому
Силы, действующие на звенья манипулятора, лежат в одной вертикальной плоскости. Поэтому
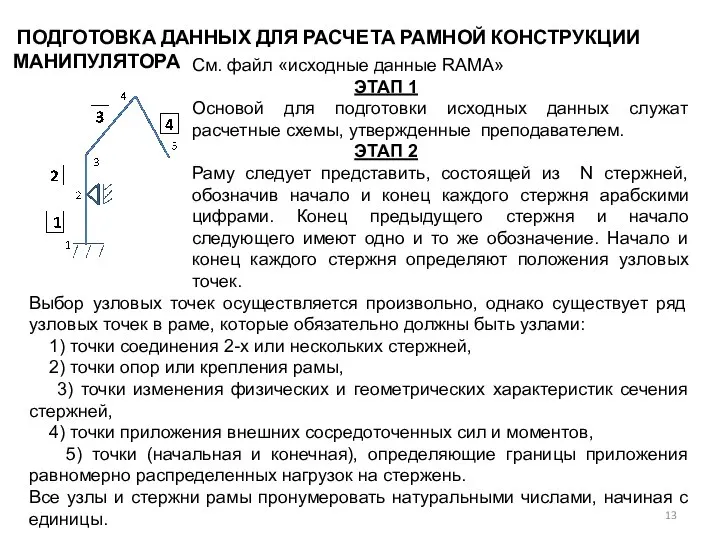
ПОДГОТОВКА ДАННЫХ ДЛЯ РАСЧЕТА РАМНОЙ КОНСТРУКЦИИ МАНИПУЛЯТОРА
См. файл «исходные данные RAMA»
ЭТАП
ПОДГОТОВКА ДАННЫХ ДЛЯ РАСЧЕТА РАМНОЙ КОНСТРУКЦИИ МАНИПУЛЯТОРА
См. файл «исходные данные RAMA»
ЭТАП
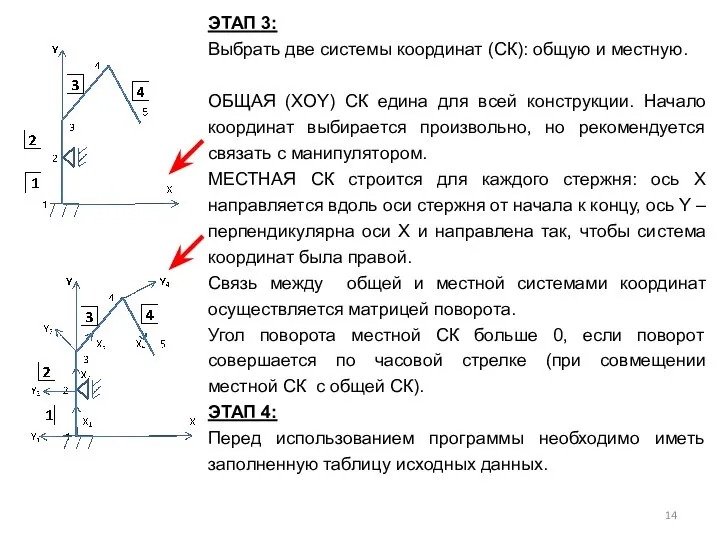
ЭТАП 3:
Выбрать две системы координат (СК): общую и местную.
ОБЩАЯ (ХOY) СК
ЭТАП 3:
Выбрать две системы координат (СК): общую и местную.
ОБЩАЯ (ХOY) СК
 Построение графика квадратичной функции - презентация по Алгебре
Построение графика квадратичной функции - презентация по Алгебре Расчет и определение оптимальной комплектации водосточной системы
Расчет и определение оптимальной комплектации водосточной системы Лекция №17 Отморожения. Электротравма.
Лекция №17 Отморожения. Электротравма. PubMed – медициналық ақпапарттық желісі 4- топша
PubMed – медициналық ақпапарттық желісі 4- топша Перечень основных правовых нормативных актов по вопросам определения,заявления и контроля таможенной стоимости Порядок опреде
Перечень основных правовых нормативных актов по вопросам определения,заявления и контроля таможенной стоимости Порядок опреде Характер и особенности педагогических традиций Ближнего Востока Колыбелью древнейших локальных цивилизаций в истории челове
Характер и особенности педагогических традиций Ближнего Востока Колыбелью древнейших локальных цивилизаций в истории челове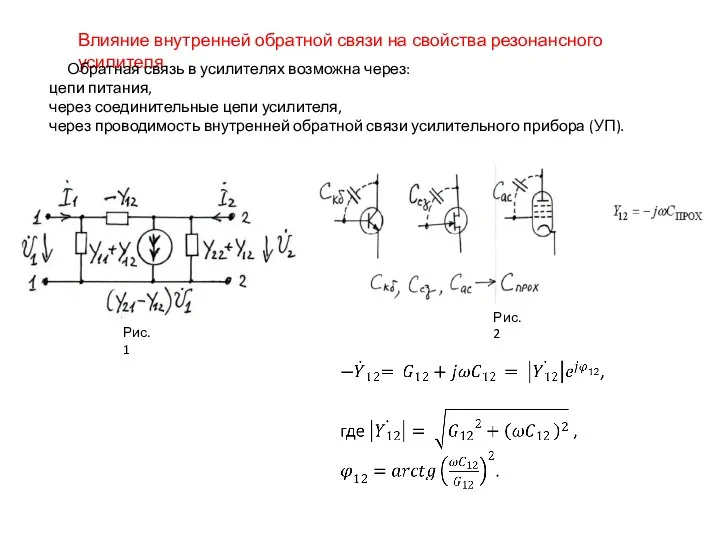 Влияние внутренней обратной связи на свойства резонансного усилителя
Влияние внутренней обратной связи на свойства резонансного усилителя Первобытная религия
Первобытная религия Родительское собрание Процедура проведения ЕГЭ
Родительское собрание Процедура проведения ЕГЭ Укрытия для личного состава и специальной техники подразделений РЭР. Общая тактика
Укрытия для личного состава и специальной техники подразделений РЭР. Общая тактика Органы Федеральной службы охраны. Таможенные органы Федеральной таможенной службы
Органы Федеральной службы охраны. Таможенные органы Федеральной таможенной службы Катехизис - азбука веры
Катехизис - азбука веры Проблема поощрения и наказания младших школьников
Проблема поощрения и наказания младших школьников Крымский государственный медицинский университет им. С.И. Георгиевского
Крымский государственный медицинский университет им. С.И. Георгиевского Политический плюрализм
Политический плюрализм Course object oriented programming lecture 2
Course object oriented programming lecture 2 Чрезвычайные ситуации на морском транспорте
Чрезвычайные ситуации на морском транспорте Локальные системы управления САУ очистки ветрового стекла спортивного самолета
Локальные системы управления САУ очистки ветрового стекла спортивного самолета Внепроизводственные методы обучения персонала
Внепроизводственные методы обучения персонала Ефросиния Полоцкая и Кирилл Туровский
Ефросиния Полоцкая и Кирилл Туровский Антон Попов, агентство интерактивного маркетинга «Редкая марка»
Антон Попов, агентство интерактивного маркетинга «Редкая марка»  Занятость и безработица 11 класс, экономика, профиль
Занятость и безработица 11 класс, экономика, профиль Требования к курсовой работе В соответствии с руководством по подготовке и оформлению рефератов, контрольных, курсовых и дипломн
Требования к курсовой работе В соответствии с руководством по подготовке и оформлению рефератов, контрольных, курсовых и дипломн Сопротивление материалов
Сопротивление материалов Теоретические и практические вопросы назначения наказания по совокупности преступлений
Теоретические и практические вопросы назначения наказания по совокупности преступлений Божья мудрость в сфере финансов
Божья мудрость в сфере финансов Тенденции налогообложения в РФ
Тенденции налогообложения в РФ Automotive lighting. Detailed spec wireless fog lamp
Automotive lighting. Detailed spec wireless fog lamp