- Разработка встраиваемой системы управления электропривода уточного накопителя ткацкого станка

Содержание
- 2. Цель работы Построение встраиваемой системы управления на основе микроконтроллера для управления уточным накопителем ткацкого станка. Объект
- 3. Задачи исследования 1. Анализ информационных источников по теории и методологии встраиваемых систем управления; 2. Исследование теории
- 4. Цель и принципиальное решение автоматизации в ткачестве Целью автоматизации в ткачестве является оптимальное протекание ткацкого процесса
- 5. Внешний вид накопителя уточной нити 1 – накопитель уточной нити, 2 – электронный блок, 3 –
- 6. Регулятор скорости нитенакопителях типа ИВЕ 9007 фирмы «ИРО» 1 – система регулирования скорости; 2 – скорость
- 7. Тормозные устройства 1, 5 – дисковые; 2, 3 – гребенчатые устройства ; 4 – магнитные ;
- 8. Отклики регуляторов на скачкообразное изменение опорного параметра Отклик Р – регулятора на скачкообразное изменение опорного параметра
- 9. Отклики регуляторов на скачкообразное изменение опорного параметра Отклик D- и PD- регуляторов на скачкообразное изменение опорного
- 10. Графики переходных процессов системы управления с ПИД- регулятором настроенным по методу Циглера – Никольса и оптимальным
- 11. Расчет устойчивости для разомкнутой системы Передаточная функция разомкнутой системы вычисляется путем перемножения передаточных функций всех звеньев,
- 12. Логарифмическое сравнение частотных характеристик для непрерывной и дискретной моделей
- 13. Переходной процесс и корневой годограф переходной функции дискретной системы Переходная функция для дискретной системы Корневой годограф
- 14. Логарифмические частотные характеристики для непрерывной и дискретной моделей при воздействии корректирующего устройства
- 15. Корневой годограф для контура с корректирующим устройством и Переходная функция для замкнутой системы Переходная функция для
- 16. Функциональная схема управления М - двигателя GE - датчиком ширины намотки FE - фотоэлектрический датчик П1
- 17. Структурная схемы управления
- 18. Схема управление 2-фазным асинхронным двигателем с помощью 3-фазного мостового инвертора 1 – обмотка управления; 2 –
- 19. Схема подключения микроконтроллера PIC16F72
- 21. Скачать презентацию
Цель работы
Построение встраиваемой системы управления на основе микроконтроллера для управления уточным
Цель работы
Построение встраиваемой системы управления на основе микроконтроллера для управления уточным
Задачи исследования
1. Анализ информационных источников по теории и методологии встраиваемых систем
Задачи исследования
1. Анализ информационных источников по теории и методологии встраиваемых систем
Цель и принципиальное решение автоматизации в ткачестве
Целью автоматизации в ткачестве
Цель и принципиальное решение автоматизации в ткачестве
Целью автоматизации в ткачестве
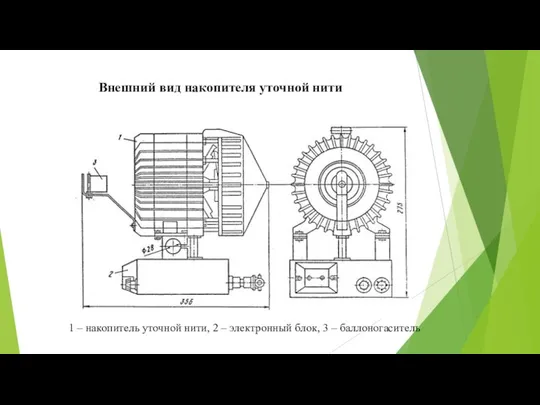
Внешний вид накопителя уточной нити
1 – накопитель уточной нити, 2 –
Внешний вид накопителя уточной нити
1 – накопитель уточной нити, 2 –
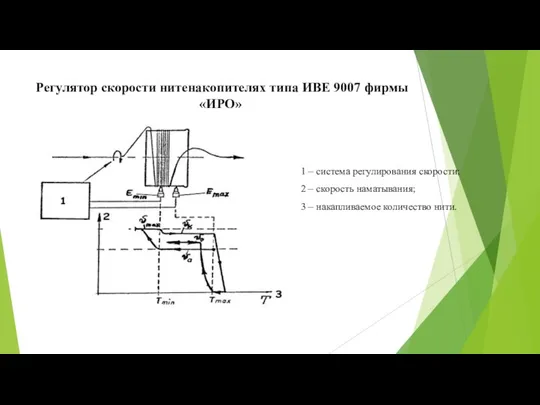
Регулятор скорости нитенакопителях типа ИВЕ 9007 фирмы «ИРО»
1 – система регулирования
Регулятор скорости нитенакопителях типа ИВЕ 9007 фирмы «ИРО»
1 – система регулирования
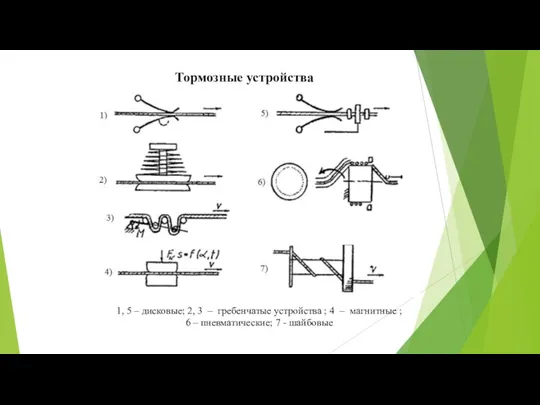
Тормозные устройства
1, 5 – дисковые; 2, 3 – гребенчатые устройства ;
Тормозные устройства
1, 5 – дисковые; 2, 3 – гребенчатые устройства ;
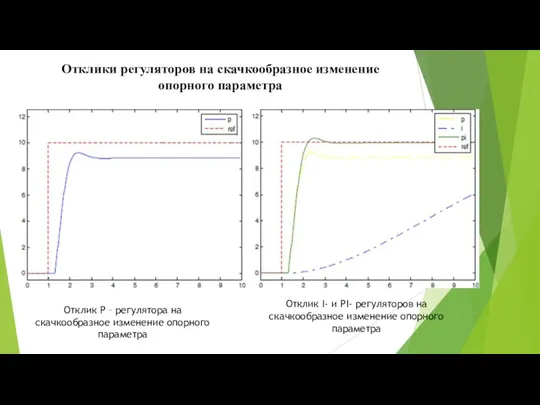
Отклики регуляторов на скачкообразное изменение опорного параметра
Отклик Р – регулятора на
Отклики регуляторов на скачкообразное изменение опорного параметра
Отклик Р – регулятора на
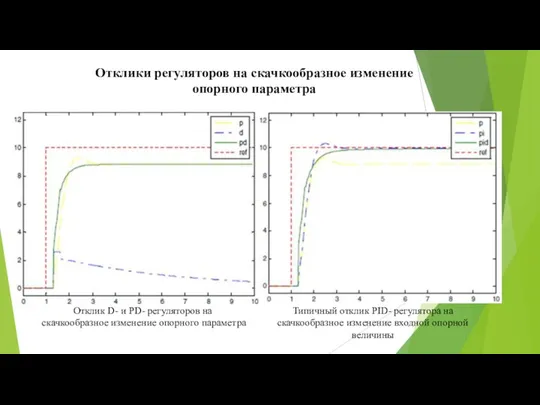
Отклики регуляторов на скачкообразное изменение опорного параметра
Отклик D- и PD- регуляторов
Отклики регуляторов на скачкообразное изменение опорного параметра
Отклик D- и PD- регуляторов
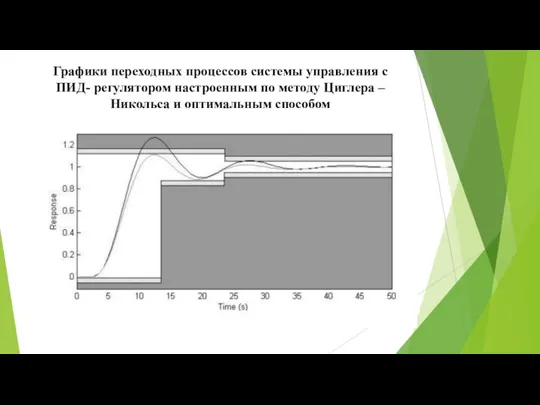
Графики переходных процессов системы управления с ПИД- регулятором настроенным по методу
Графики переходных процессов системы управления с ПИД- регулятором настроенным по методу
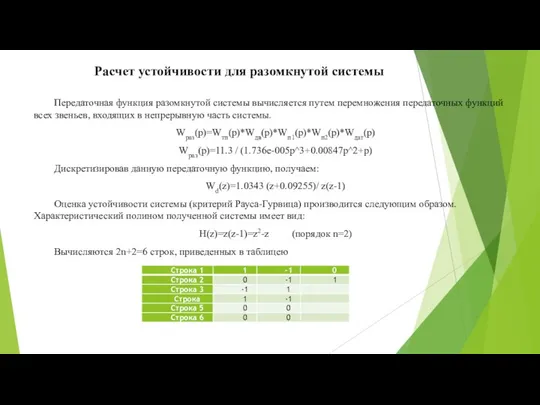
Расчет устойчивости для разомкнутой системы
Передаточная функция разомкнутой системы вычисляется путем перемножения
Расчет устойчивости для разомкнутой системы
Передаточная функция разомкнутой системы вычисляется путем перемножения
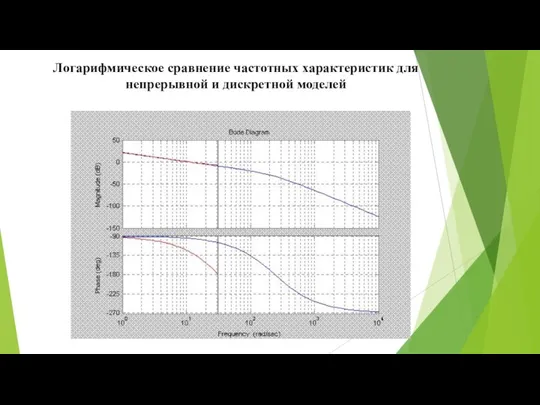
Логарифмическое сравнение частотных характеристик для непрерывной и дискретной моделей
Логарифмическое сравнение частотных характеристик для непрерывной и дискретной моделей
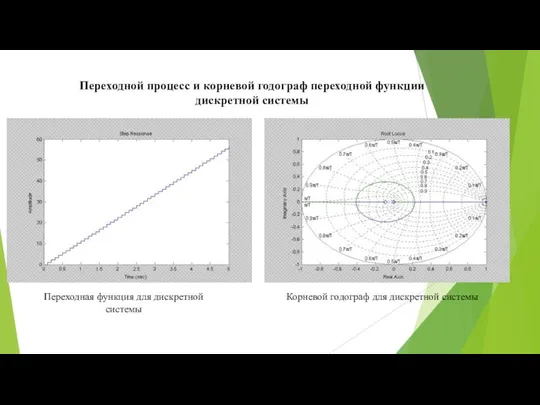
Переходной процесс и корневой годограф переходной функции дискретной системы
Переходная функция для
Переходной процесс и корневой годограф переходной функции дискретной системы
Переходная функция для
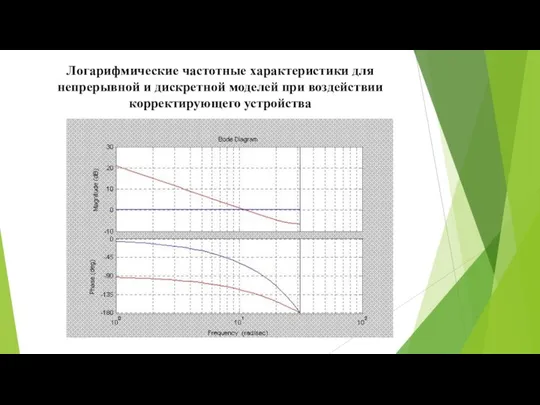
Логарифмические частотные характеристики для непрерывной и дискретной моделей при воздействии корректирующего
Логарифмические частотные характеристики для непрерывной и дискретной моделей при воздействии корректирующего

Корневой годограф для контура с корректирующим устройством и Переходная функция для
Корневой годограф для контура с корректирующим устройством и Переходная функция для
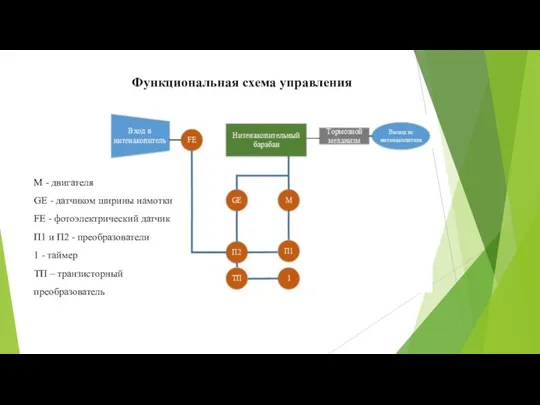
Функциональная схема управления
М - двигателя
GE - датчиком ширины намотки
FE
Функциональная схема управления
М - двигателя
GE - датчиком ширины намотки
FE

Структурная схемы управления
Структурная схемы управления

Схема управление 2-фазным асинхронным двигателем с помощью 3-фазного мостового инвертора
1 –
Схема управление 2-фазным асинхронным двигателем с помощью 3-фазного мостового инвертора
1 –

Схема подключения микроконтроллера
PIC16F72
Схема подключения микроконтроллера
PIC16F72
 Польові телефонні аппарати, комутатори та кабелі
Польові телефонні аппарати, комутатори та кабелі Презентация Экспертиза растительного масла
Презентация Экспертиза растительного масла Ажурные ограды. 3 класс
Ажурные ограды. 3 класс Презентация Обеспечение достоинства человека, как цель социального правового государства
Презентация Обеспечение достоинства человека, как цель социального правового государства Мировая внешняя задолженность Мировая долговая экономика: основные элементы и тенденции Причины возникновения и развития долг
Мировая внешняя задолженность Мировая долговая экономика: основные элементы и тенденции Причины возникновения и развития долг Значение парламентского контроля и парламентских расследований в сфере противодействия коррупции
Значение парламентского контроля и парламентских расследований в сфере противодействия коррупции Формы времени и хронотопа в романе
Очерки по исторической поэтике // Бахтин М. М
Формы времени и хронотопа в романе
Очерки по исторической поэтике // Бахтин М. М Стратегическое управление рисками
Стратегическое управление рисками Міжнародні норми в галузі охорони праці. Основні законодавчі та нормативно-правові акти з охорони праці в галузі
Міжнародні норми в галузі охорони праці. Основні законодавчі та нормативно-правові акти з охорони праці в галузі Лес - презентация для начальной школы_
Лес - презентация для начальной школы_ Сканеры. Принцип действия
Сканеры. Принцип действия Входной контроль переработка тыквенного нектара
Входной контроль переработка тыквенного нектара Вареники
Вареники  Я выбираю спорт. Каратэ
Я выбираю спорт. Каратэ Техніко-тактична підготовка юних футболістів
Техніко-тактична підготовка юних футболістів Сравнительная политика. Как возможно сравнение? Что такое сравнительная политика? Тема 1
Сравнительная политика. Как возможно сравнение? Что такое сравнительная политика? Тема 1 <number>
<number>  Как устроен компьютер 5 класс
Как устроен компьютер 5 класс Фирмы в экономике Что такое фирма? Факторы производства и факторные доходы Экономические и бухгалтерские издержки Постоянные
Фирмы в экономике Что такое фирма? Факторы производства и факторные доходы Экономические и бухгалтерские издержки Постоянные Синдром недостаточности кровообращения
Синдром недостаточности кровообращения  Разработка СИПР Севастополь
Разработка СИПР Севастополь Жизнь Выборгского филиала - сентябрь 2018 - сентябрь 2019
Жизнь Выборгского филиала - сентябрь 2018 - сентябрь 2019 Андреевская церковь
Андреевская церковь Презентация аппликации «ДОМ ДЛЯ ОБЕЗЬЯНКИ» Выполнила методист по работе с детьми дома культуры п. Африканда:
Презентация аппликации «ДОМ ДЛЯ ОБЕЗЬЯНКИ» Выполнила методист по работе с детьми дома культуры п. Африканда:  Акулы
Акулы  Динамикалық буындар және структуралық схемаларды түрлендіру
Динамикалық буындар және структуралық схемаларды түрлендіру Презентация "кожевенные товары" - скачать презентации по Экономике
Презентация "кожевенные товары" - скачать презентации по Экономике Почему Библия действенна сегодня
Почему Библия действенна сегодня