- Регулируемый электропривод подачи токарного станка

Содержание
- 2. Кинематическая схема механизмов подач станка
- 3. Архитектура системы управления Структурная схема следящего электропривода Схема токарной обработки
- 4. Двигатель 5МТ 47Нм
- 5. Параметры двигателя 5МТ
- 6. Схема тиристорного преобразователя SDC1-47
- 7. Привод подачи Структурная схема механической системы ЛАЧХ двухмассовой механической системы Расчетная схема механической системы
- 8. Предельные характеристики электропривода Структурная схема силового канала следящего электропривода Предельные характеристики электропривода при пониженном напряжении
- 9. Структурная схема двухмассовой САУ СЭП
- 10. Имитационная модель нелинейной САУ СЭП ДМС Контур тока с ПИ-РТ на МО, Контур скорости с ПИ-РС
- 11. Ошибка положения в зависимости от местоположения датчика Датчик на валу двигателя. Кривые переходных процессов сигнала рассогласования
- 12. Переходные процессы в СЭП с двухмассовой системой с датчиком на механизме Отработка скачка управляющего воздействия Lзад=
- 13. Переходные процессы в СЭП с двухмассовой системой с датчиком на механизме (продолжение) Отработка скачка управляющего воздействия
- 14. Функциональная схема СЭП
- 15. Экономика Диаграмма Ганта
- 16. Финансовые затраты на модернизацию
- 17. Социальная ответственность
- 19. Скачать презентацию

Кинематическая схема механизмов подач станка
Кинематическая схема механизмов подач станка
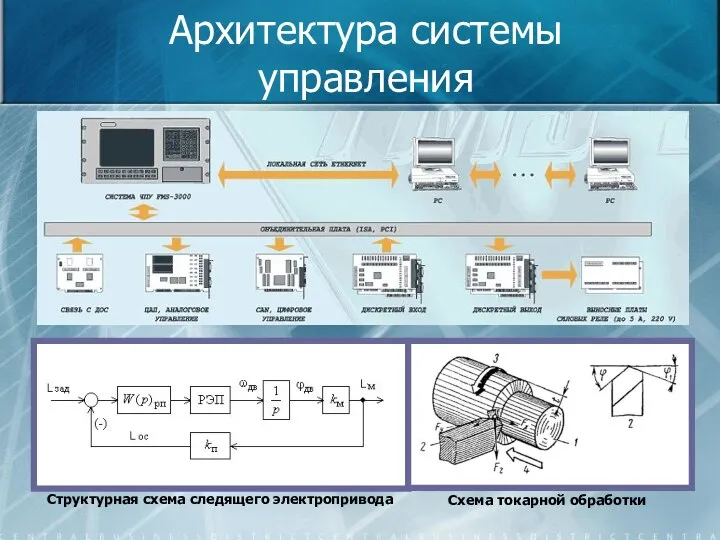
Архитектура системы управления
Структурная схема следящего электропривода
Схема токарной обработки
Архитектура системы управления
Структурная схема следящего электропривода
Схема токарной обработки
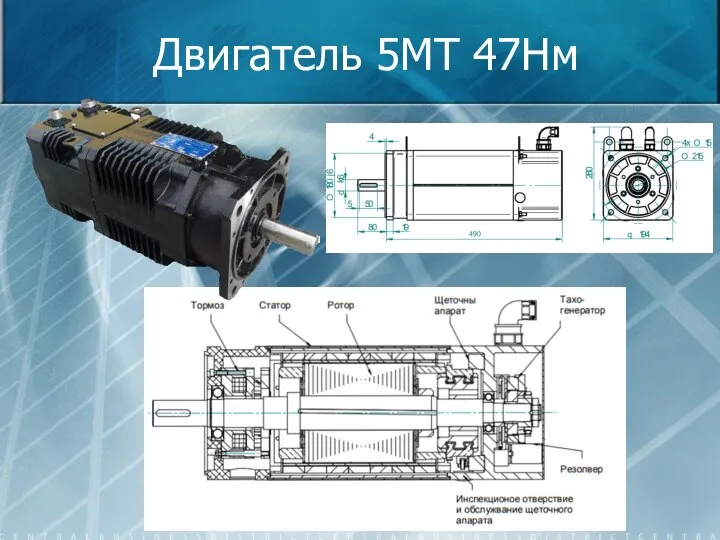
Двигатель 5МТ 47Нм
Двигатель 5МТ 47Нм
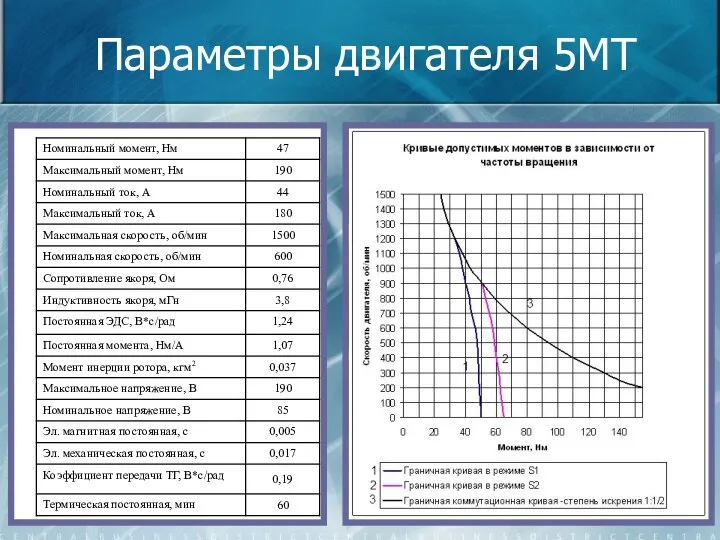
Параметры двигателя 5МТ
Параметры двигателя 5МТ

Схема тиристорного преобразователя SDC1-47
Схема тиристорного преобразователя SDC1-47
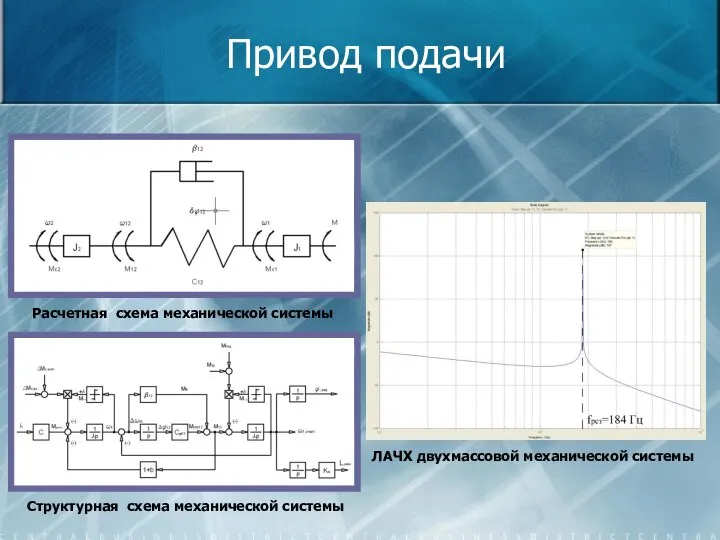
Привод подачи
Структурная схема механической системы
ЛАЧХ двухмассовой механической системы
Расчетная схема механической
Привод подачи
Структурная схема механической системы
ЛАЧХ двухмассовой механической системы
Расчетная схема механической
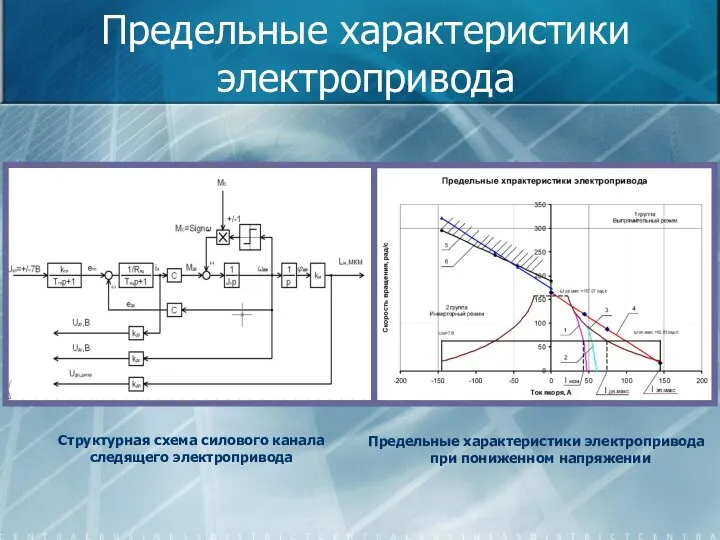
Предельные характеристики электропривода
Структурная схема силового канала
следящего электропривода
Предельные характеристики электропривода
при пониженном
Предельные характеристики электропривода
Структурная схема силового канала
следящего электропривода
Предельные характеристики электропривода
при пониженном

Структурная схема двухмассовой САУ СЭП
Структурная схема двухмассовой САУ СЭП

Имитационная модель нелинейной САУ СЭП ДМС
Контур тока с ПИ-РТ на МО,
Имитационная модель нелинейной САУ СЭП ДМС
Контур тока с ПИ-РТ на МО,
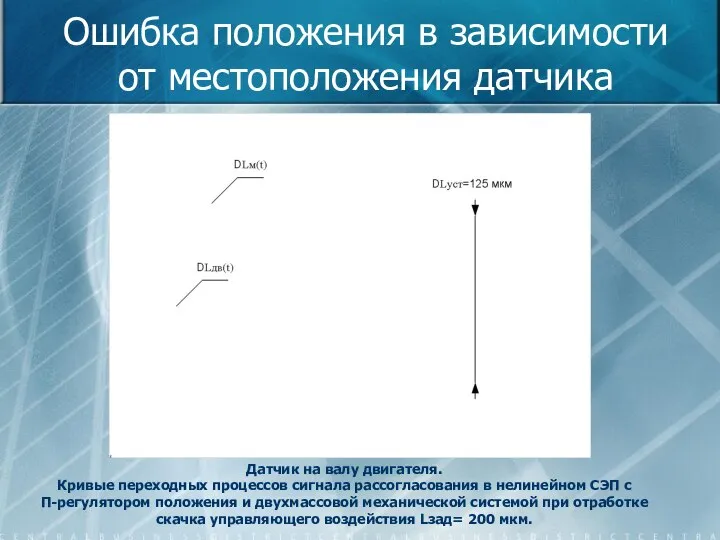
Ошибка положения в зависимости от местоположения датчика
Датчик на валу двигателя.
Кривые
Ошибка положения в зависимости от местоположения датчика
Датчик на валу двигателя.
Кривые
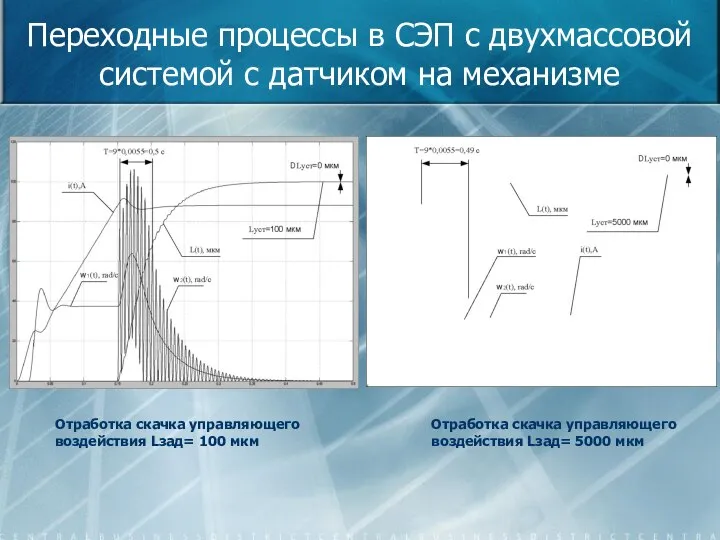
Переходные процессы в СЭП с двухмассовой системой с датчиком на механизме
Отработка
Переходные процессы в СЭП с двухмассовой системой с датчиком на механизме
Отработка
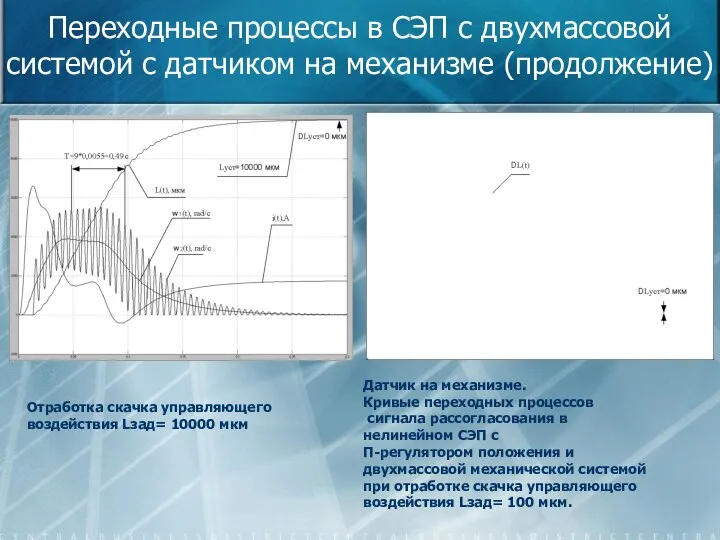
Переходные процессы в СЭП с двухмассовой
системой с датчиком на механизме
Переходные процессы в СЭП с двухмассовой системой с датчиком на механизме

Функциональная схема СЭП
Функциональная схема СЭП
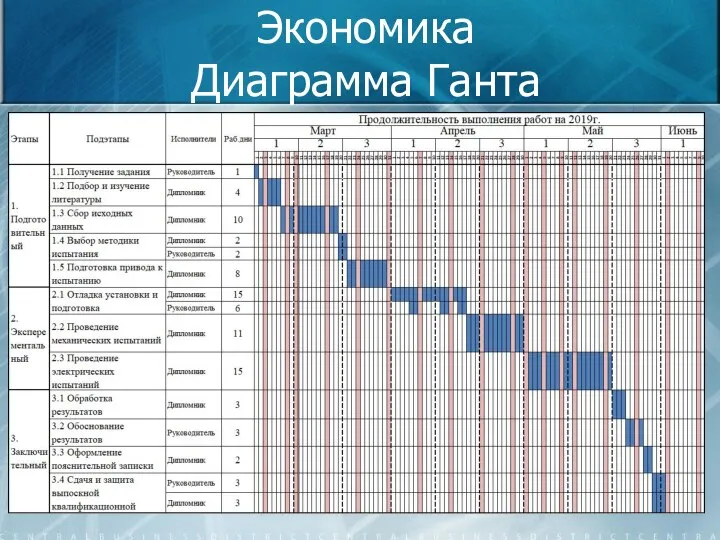
Экономика
Диаграмма Ганта
Экономика
Диаграмма Ганта

Финансовые затраты на модернизацию
Финансовые затраты на модернизацию

Социальная ответственность
Социальная ответственность
 Механизм правового регулирования
Механизм правового регулирования METRO. Дизайн для Windows Phone Никита Лукьянец (nikiluk) - презентация
METRO. Дизайн для Windows Phone Никита Лукьянец (nikiluk) - презентация Вербное воскресение. Пасха
Вербное воскресение. Пасха Инженерная графика. Начертательная геометрия. Машиностроительное черчение
Инженерная графика. Начертательная геометрия. Машиностроительное черчение Урок русского языка в 4 классе по теме: «Связь слов в словосочетании. Примыкание.» Выполнила: Суслова Е.А., учитель ГБОУ СОШ №1 гор
Урок русского языка в 4 классе по теме: «Связь слов в словосочетании. Примыкание.» Выполнила: Суслова Е.А., учитель ГБОУ СОШ №1 гор МОУ «Лицей №24 имени Героя Советского Союза А.В. Корявина» Русская матрёшка. Какая она? Учитель начальных классов
МОУ «Лицей №24 имени Героя Советского Союза А.В. Корявина» Русская матрёшка. Какая она? Учитель начальных классов  Вариация признаков. Показатели вариации
Вариация признаков. Показатели вариации Мәңгілік ел – тарих толқынында
Мәңгілік ел – тарих толқынында Конькобежный спорт
Конькобежный спорт  Зачетная работа по риторике. Как интернет влияет на учебу и жизнь человека.
Зачетная работа по риторике. Как интернет влияет на учебу и жизнь человека. Материя (материальное бытие) Выполнила: студентка 1 курса Экономического факультета группы М-122Б Катичева Анна
Материя (материальное бытие) Выполнила: студентка 1 курса Экономического факультета группы М-122Б Катичева Анна «Роль кишечной микрофлоры и пробиотиков в становлении и развитии иммунитета у детей.»
«Роль кишечной микрофлоры и пробиотиков в становлении и развитии иммунитета у детей.» стереотипы и установки
стереотипы и установки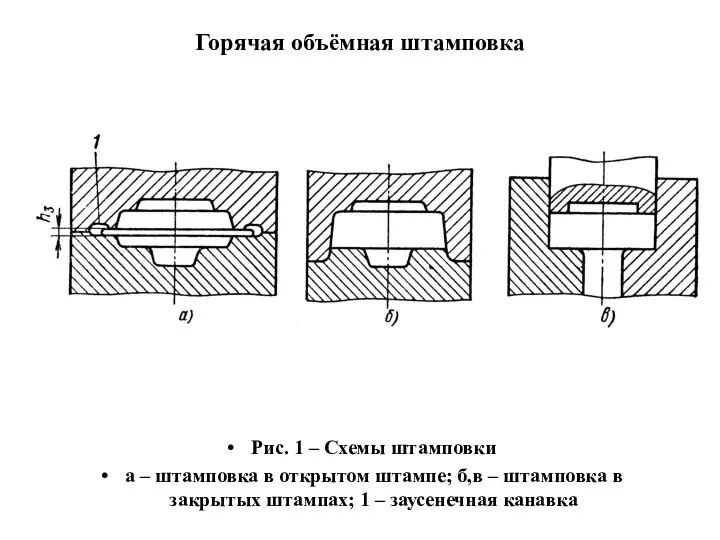 Горячая объёмная штамповка
Горячая объёмная штамповка Парламентские дебаты
Парламентские дебаты Начертательная геометрия. Пересечение поверхности плоскостью общего положения. (Лекция 7)
Начертательная геометрия. Пересечение поверхности плоскостью общего положения. (Лекция 7) Массивы в языке СИ
Массивы в языке СИ Гапонова Стелла
Гапонова Стелла Без названия
Без названия Нечеткие множества
Нечеткие множества  Оздоровитьельная аэробика
Оздоровитьельная аэробика Баскетбол в школе - презентация для начальной школы_
Баскетбол в школе - презентация для начальной школы_ Фотоописание элементов для выступления команд корпоративного черлидинга на Creator Games
Фотоописание элементов для выступления команд корпоративного черлидинга на Creator Games Қазақ халқының ділі
Қазақ халқының ділі Задачи 40-42 по инженерной графике
Задачи 40-42 по инженерной графике Зоны химического заражения
Зоны химического заражения Инфляция и её виды
Инфляция и её виды Фитнес. Тренировочные принципы
Фитнес. Тренировочные принципы