- SHERPA promalp 3 – портативное электрическое устройство высокой удельной мощности

Содержание
- 2. Содержание: Введение. Sherpa promalp 3. Общее описание. Области применения устройства. Sherpa promalp 3. Техническое описание. 3.1.
- 3. Команда Booster на данный момент уже разработала и изготовила действующие прототипы двух устройств – это аккумуляторный
- 4. 2. Sherpa promalp 3. Общее описание. Области применения устройства. Sherpa promalp 3 – это портативная аккумуляторная
- 5. Горные поисково-спасательные отряды – транспортировка грузов и людей в горных условиях. Фрира́йд – катание на сноуборде
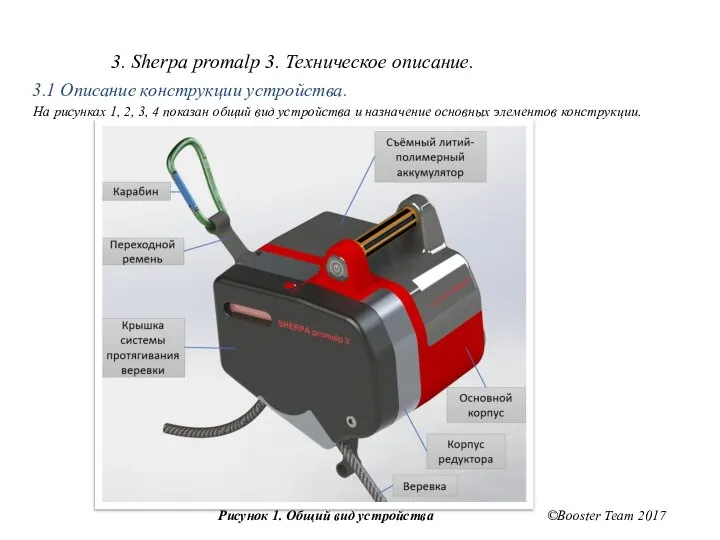
- 6. ©Booster Team 2017 3. Sherpa promalp 3. Техническое описание. На рисунках 1, 2, 3, 4 показан
- 7. Рисунок 2. Общий вид устройства ©Booster Team 2017
- 8. Рисунок 3. Общий вид устройства ©Booster Team 2017
- 9. Рисунок 4. Общий вид устройства ©Booster Team 2017
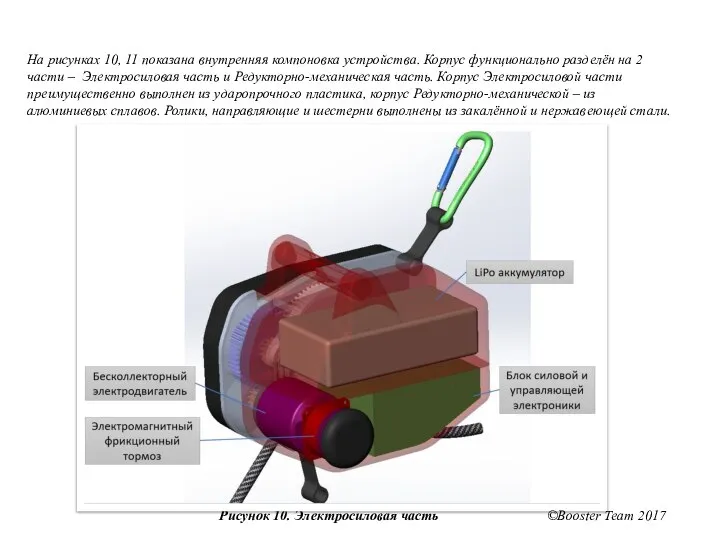
- 10. Основной корпус выполнен из ударопрочного пластика, корпус съемного аккумулятора из ударопрочного пластика с резиновым покрытием. Корпус
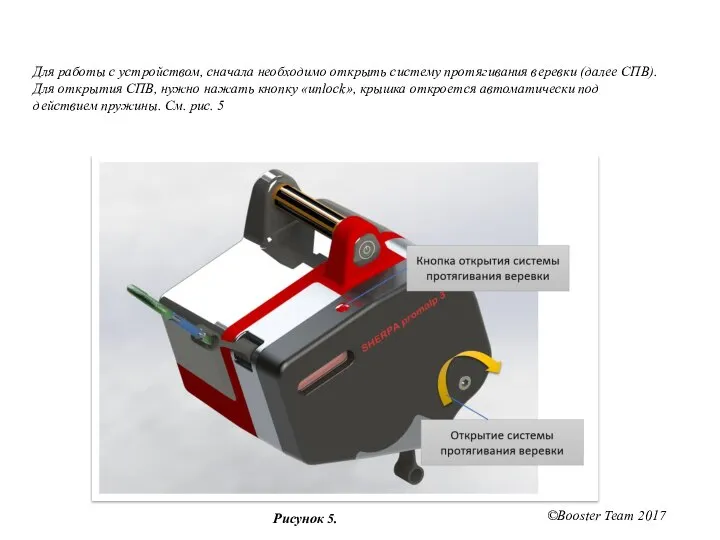
- 11. Для работы с устройством, сначала необходимо открыть систему протягивания веревки (далее СПВ). Для открытия СПВ, нужно
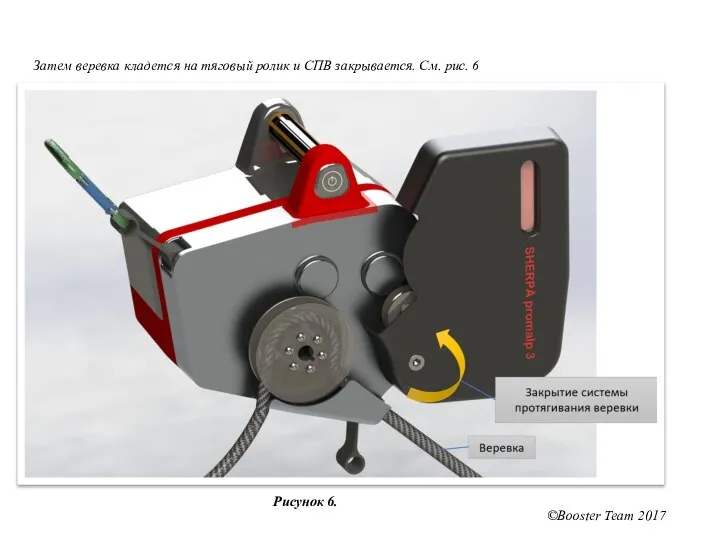
- 12. Затем веревка кладется на тяговый ролик и СПВ закрывается. См. рис. 6 Рисунок 6. ©Booster Team
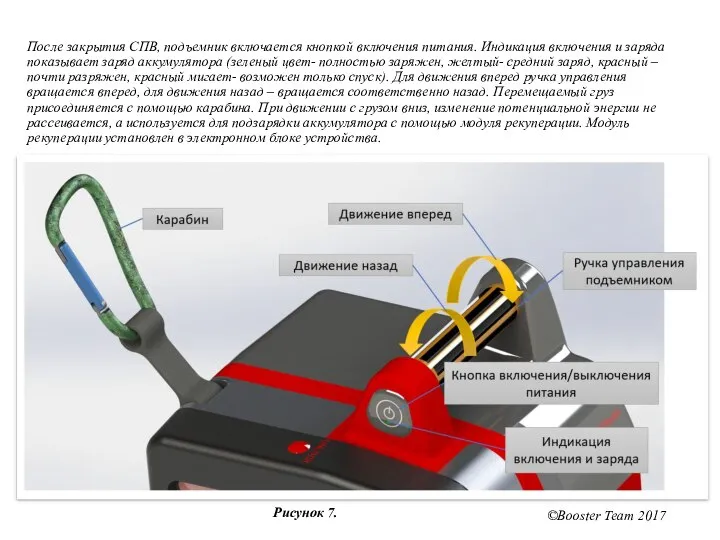
- 13. После закрытия СПВ, подъемник включается кнопкой включения питания. Индикация включения и заряда показывает заряд аккумулятора (зеленый
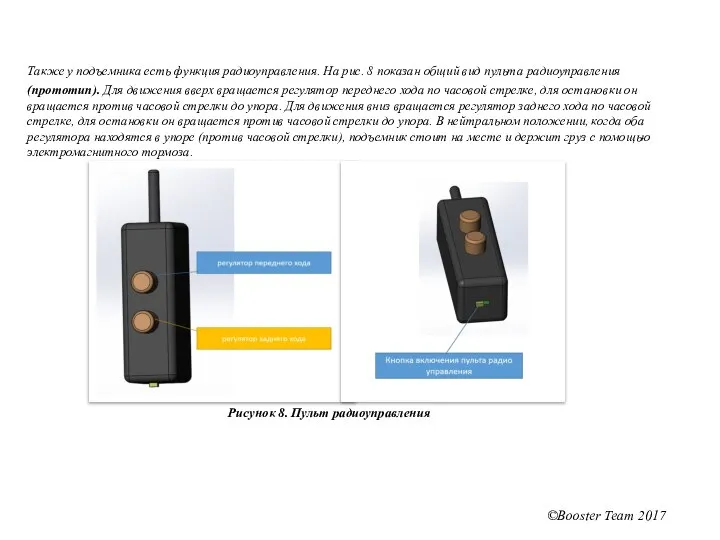
- 14. Также у подъемника есть функция радиоуправления. На рис. 8 показан общий вид пульта радиоуправления (прототип). Для
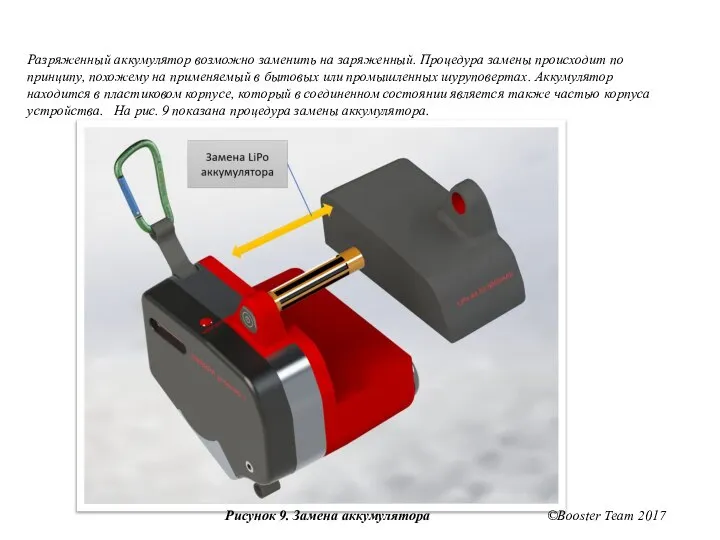
- 15. Разряженный аккумулятор возможно заменить на заряженный. Процедура замены происходит по принципу, похожему на применяемый в бытовых
- 16. На рисунках 10, 11 показана внутренняя компоновка устройства. Корпус функционально разделён на 2 части – Электросиловая
- 17. Рисунок 11. Редукторно-механическая часть ©Booster Team 2017
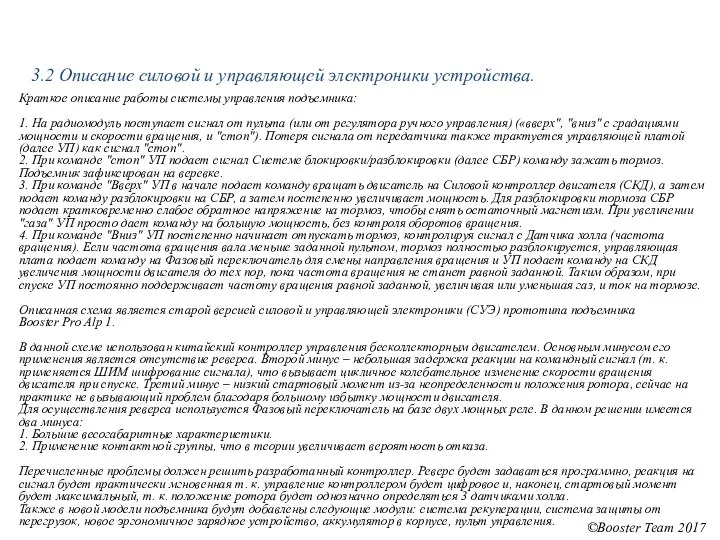
- 18. 3.2 Описание силовой и управляющей электроники устройства. Краткое описание работы системы управления подъемника: 1. На радиомодуль
- 19. Рисунок 12. Схема СУЭ Booster pro alp 1 ©Booster Team 2017
- 20. Рисунок 13. Схема СУЭ Sherpa promalp 3 ©Booster Team 2017
- 21. 3.3 Технические характеристики устройства. Технические характеристики Sherpa promalp 3: Масса изделия с аккумулятором: 6-8 кг (уточняется
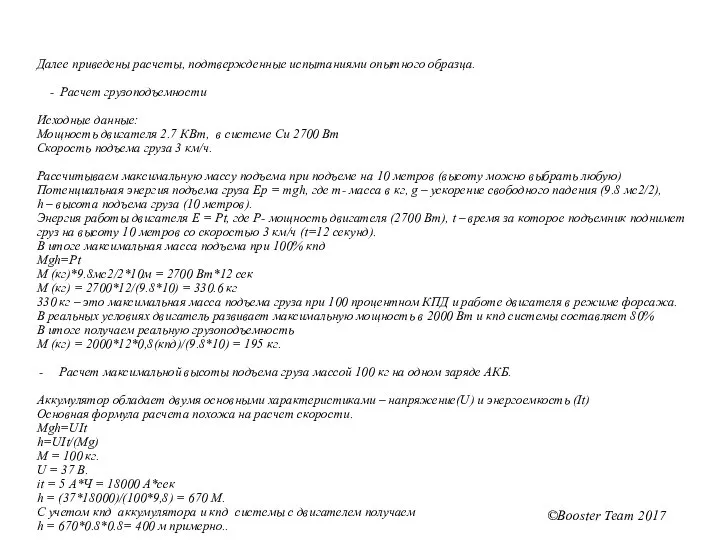
- 22. Далее приведены расчеты, подтвержденные испытаниями опытного образца. - Расчет грузоподъемности Исходные данные: Мощность двигателя 2.7 КВт,
- 23. Электродвигатель подъемника обладает мощностью 2.7 кВт (на форсаже) и частотой вращения 9000 об/мин, что сопоставимо по
- 24. Рисунок 14. УШМ ©Booster Team 2017
- 25. Рисунок 15. УШМ ©Booster Team 2017
- 26. Рисунок 16. УШМ ©Booster Team 2017
- 27. Рисунок 17. УШМ ©Booster Team 2017
- 28. Мощность и компактность подъемника также позволяет использовать его для моторизации легких транспортных средств, таких, как велосипед,
- 29. Рисунок 18. Моторизация велосипеда ©Booster Team 2017
- 30. Рисунок 19. Моторизация велосипеда ©Booster Team 2017
- 31. Рисунок 20. Моторизация велосипеда ©Booster Team 2017
- 32. Рисунок 21. Моторизация самоката ©Booster Team 2017
- 33. Рисунок 22. Моторизация инвалидной коляски ©Booster Team 2017
- 34. 4. Приложения. Ссылки на видео основных испытаний прототипа: https://www.youtube.com/watch?v=Z0WvrOGwmqQ https://vimeo.com/160583616 https://www.youtube.com/watch?v=UHP9zM8G6f4 ©Booster Team 2017
- 35. Рекомендательные письма организаций: ©Booster Team 2017
- 36. ©Booster Team 2017
- 37. ©Booster Team 2017
- 38. Патенты: ©Booster Team 2017
- 40. Скачать презентацию
Содержание:
Введение.
Sherpa promalp 3. Общее описание. Области применения устройства.
Sherpa promalp 3. Техническое
Содержание:
Введение.
Sherpa promalp 3. Общее описание. Области применения устройства.
Sherpa promalp 3. Техническое

Команда Booster на данный момент уже разработала и изготовила действующие прототипы
Команда Booster на данный момент уже разработала и изготовила действующие прототипы

2. Sherpa promalp 3. Общее описание. Области применения устройства.
Sherpa promalp 3
2. Sherpa promalp 3. Общее описание. Области применения устройства.
Sherpa promalp 3
Горные поисково-спасательные отряды – транспортировка грузов и людей в горных условиях.
Фрира́йд
Горные поисково-спасательные отряды – транспортировка грузов и людей в горных условиях.
Фрира́йд
©Booster Team 2017
3. Sherpa promalp 3. Техническое описание.
На рисунках 1, 2,
©Booster Team 2017
3. Sherpa promalp 3. Техническое описание.
На рисунках 1, 2,
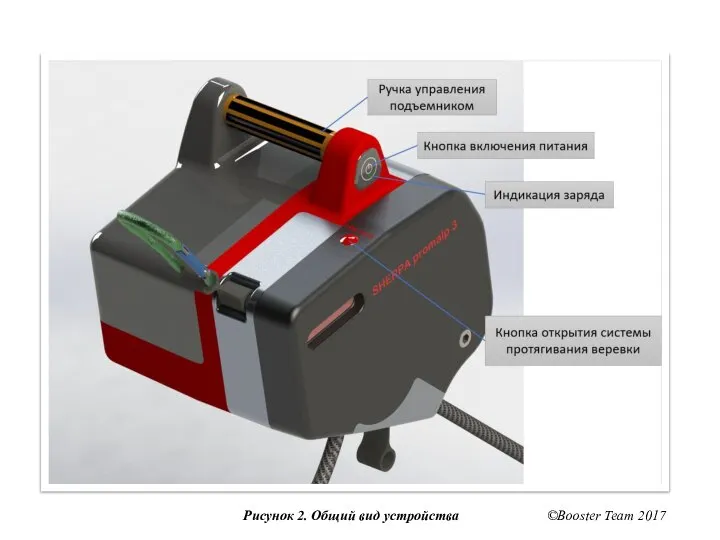
Рисунок 2. Общий вид устройства
©Booster Team 2017
Рисунок 2. Общий вид устройства
©Booster Team 2017
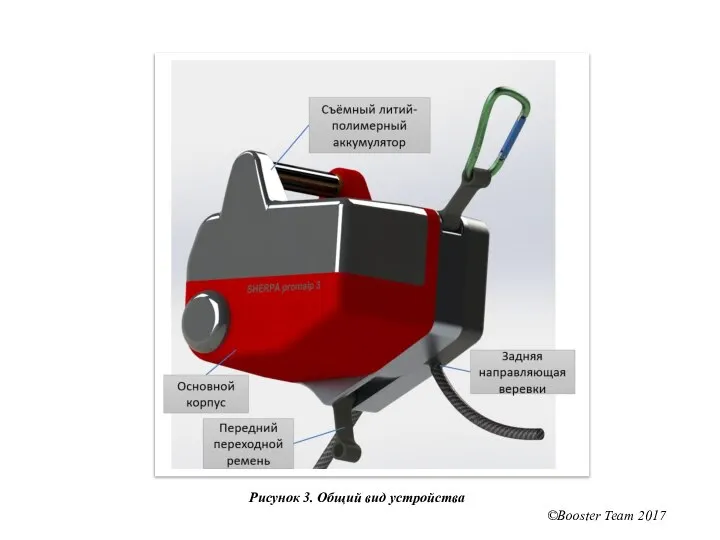
Рисунок 3. Общий вид устройства
©Booster Team 2017
Рисунок 3. Общий вид устройства
©Booster Team 2017
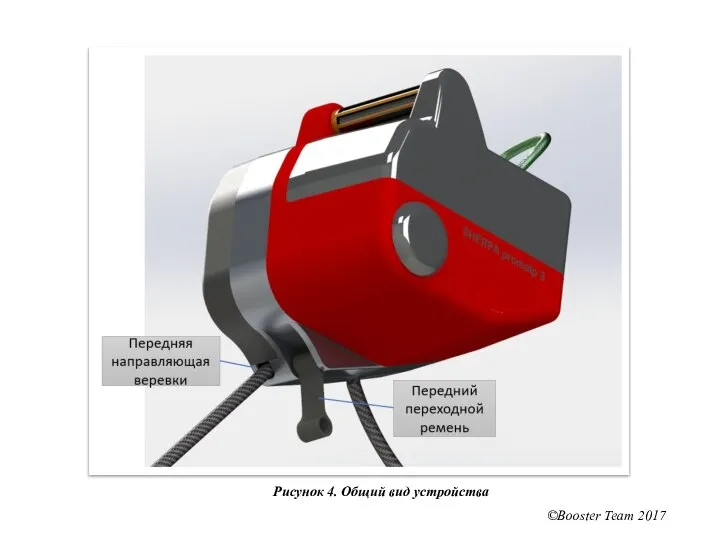
Рисунок 4. Общий вид устройства
©Booster Team 2017
Рисунок 4. Общий вид устройства
©Booster Team 2017
Основной корпус выполнен из ударопрочного пластика, корпус съемного аккумулятора из ударопрочного
Основной корпус выполнен из ударопрочного пластика, корпус съемного аккумулятора из ударопрочного
Для работы с устройством, сначала необходимо открыть систему протягивания веревки (далее
Для работы с устройством, сначала необходимо открыть систему протягивания веревки (далее
Затем веревка кладется на тяговый ролик и СПВ закрывается. См. рис.
Затем веревка кладется на тяговый ролик и СПВ закрывается. См. рис.
После закрытия СПВ, подъемник включается кнопкой включения питания. Индикация включения и
После закрытия СПВ, подъемник включается кнопкой включения питания. Индикация включения и
Также у подъемника есть функция радиоуправления. На рис. 8 показан общий
Также у подъемника есть функция радиоуправления. На рис. 8 показан общий
Разряженный аккумулятор возможно заменить на заряженный. Процедура замены происходит по принципу,
Разряженный аккумулятор возможно заменить на заряженный. Процедура замены происходит по принципу,
На рисунках 10, 11 показана внутренняя компоновка устройства. Корпус функционально разделён
На рисунках 10, 11 показана внутренняя компоновка устройства. Корпус функционально разделён
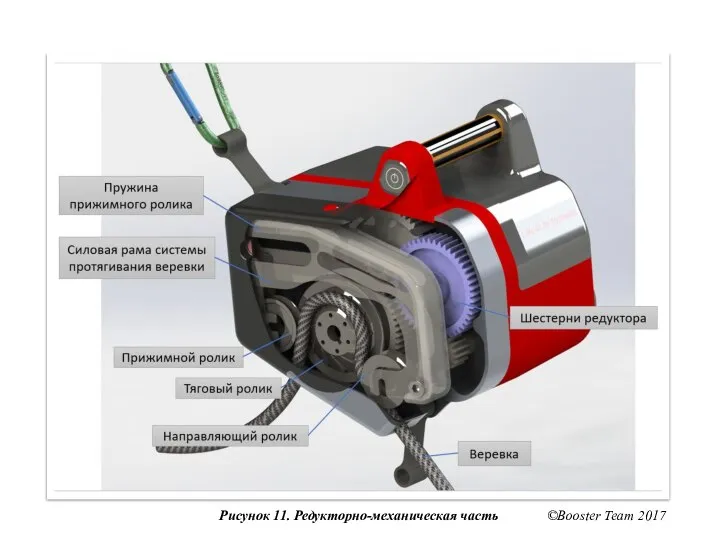
Рисунок 11. Редукторно-механическая часть
©Booster Team 2017
Рисунок 11. Редукторно-механическая часть
©Booster Team 2017
3.2 Описание силовой и управляющей электроники устройства.
Краткое описание работы системы управления
3.2 Описание силовой и управляющей электроники устройства.
Краткое описание работы системы управления
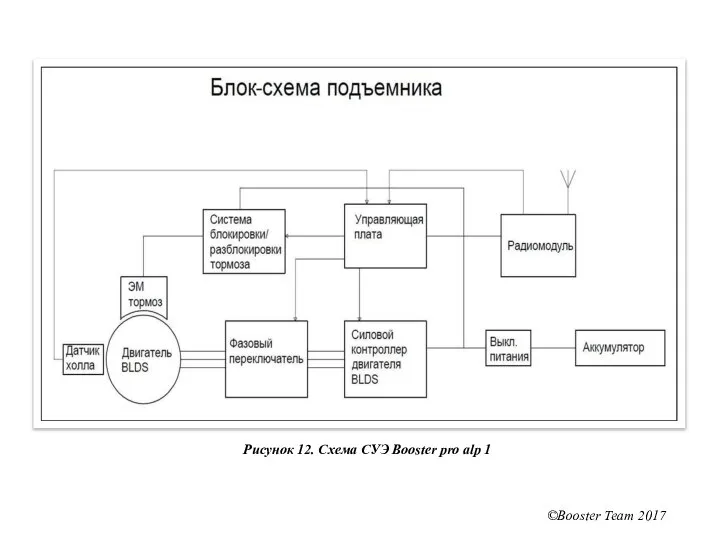
Рисунок 12. Схема СУЭ Booster pro alp 1
©Booster Team 2017
Рисунок 12. Схема СУЭ Booster pro alp 1
©Booster Team 2017
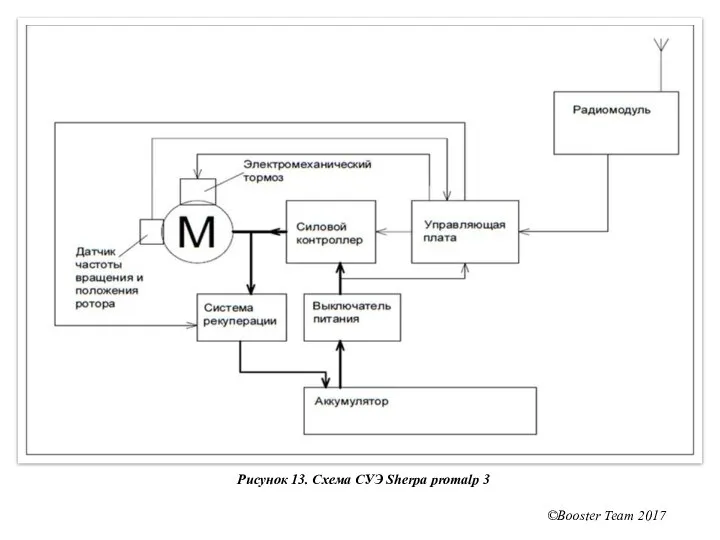
Рисунок 13. Схема СУЭ Sherpa promalp 3
©Booster Team 2017
Рисунок 13. Схема СУЭ Sherpa promalp 3
©Booster Team 2017
3.3 Технические характеристики устройства.
Технические характеристики Sherpa promalp 3:
Масса изделия с аккумулятором:
3.3 Технические характеристики устройства.
Технические характеристики Sherpa promalp 3:
Масса изделия с аккумулятором:
Далее приведены расчеты, подтвержденные испытаниями опытного образца.
- Расчет грузоподъемности
Исходные данные:
Мощность
Далее приведены расчеты, подтвержденные испытаниями опытного образца.
- Расчет грузоподъемности
Исходные данные:
Мощность
Электродвигатель подъемника обладает мощностью 2.7 кВт (на форсаже) и частотой вращения
Электродвигатель подъемника обладает мощностью 2.7 кВт (на форсаже) и частотой вращения
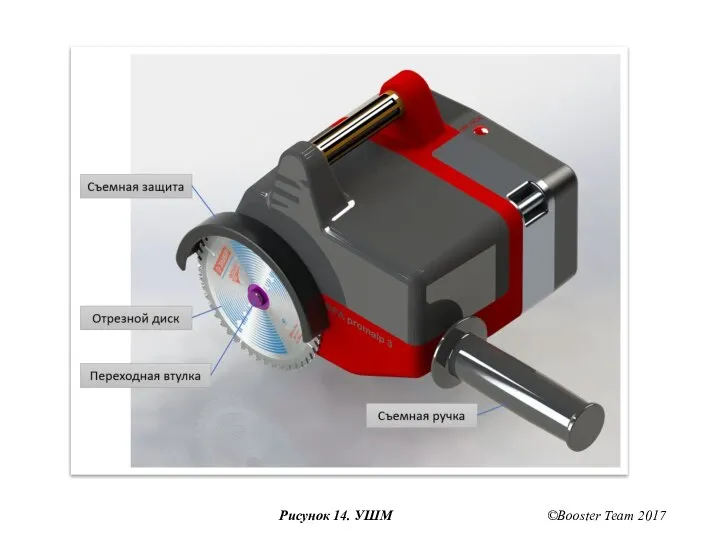
Рисунок 14. УШМ
©Booster Team 2017
Рисунок 14. УШМ
©Booster Team 2017
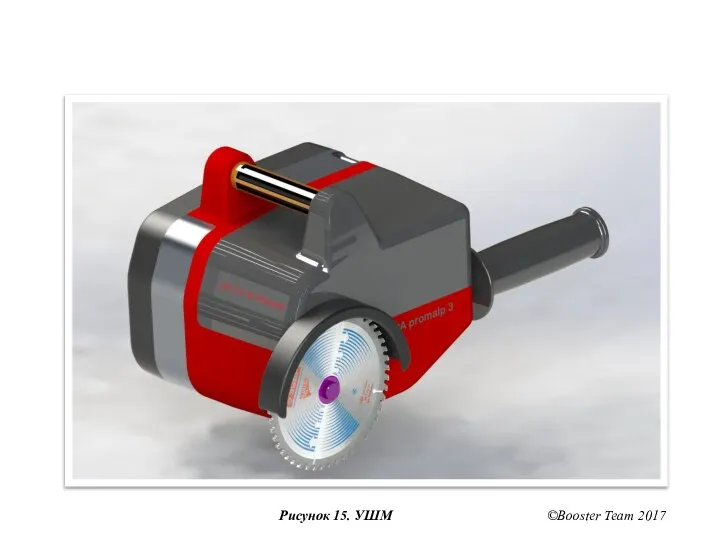
Рисунок 15. УШМ
©Booster Team 2017
Рисунок 15. УШМ
©Booster Team 2017

Рисунок 16. УШМ
©Booster Team 2017
Рисунок 16. УШМ
©Booster Team 2017
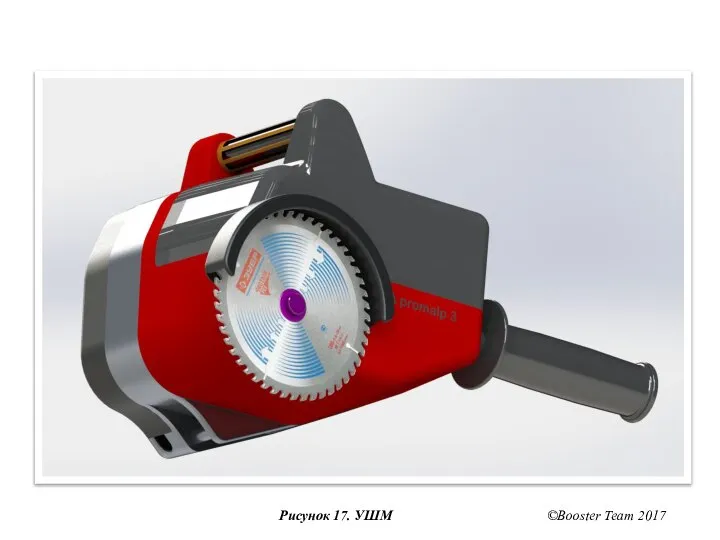
Рисунок 17. УШМ
©Booster Team 2017
Рисунок 17. УШМ
©Booster Team 2017
Мощность и компактность подъемника также позволяет использовать его для моторизации легких
Мощность и компактность подъемника также позволяет использовать его для моторизации легких

Рисунок 18. Моторизация велосипеда
©Booster Team 2017
Рисунок 18. Моторизация велосипеда
©Booster Team 2017

Рисунок 19. Моторизация велосипеда
©Booster Team 2017
Рисунок 19. Моторизация велосипеда
©Booster Team 2017

Рисунок 20. Моторизация велосипеда
©Booster Team 2017
Рисунок 20. Моторизация велосипеда
©Booster Team 2017

Рисунок 21. Моторизация самоката
©Booster Team 2017
Рисунок 21. Моторизация самоката
©Booster Team 2017
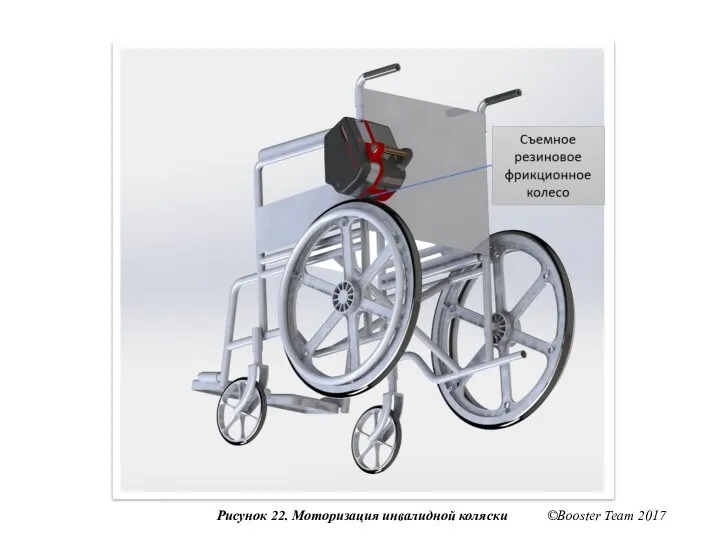
Рисунок 22. Моторизация инвалидной коляски
©Booster Team 2017
Рисунок 22. Моторизация инвалидной коляски
©Booster Team 2017
4. Приложения.
Ссылки на видео основных испытаний прототипа:
https://www.youtube.com/watch?v=Z0WvrOGwmqQ
https://vimeo.com/160583616
https://www.youtube.com/watch?v=UHP9zM8G6f4
©Booster Team 2017
4. Приложения.
Ссылки на видео основных испытаний прототипа:
https://www.youtube.com/watch?v=Z0WvrOGwmqQ
https://vimeo.com/160583616
https://www.youtube.com/watch?v=UHP9zM8G6f4
©Booster Team 2017
Рекомендательные письма организаций:
©Booster Team 2017
Рекомендательные письма организаций:
©Booster Team 2017
©Booster Team 2017
©Booster Team 2017
©Booster Team 2017
©Booster Team 2017
Патенты:
©Booster Team 2017
Патенты:
©Booster Team 2017
 Презентация на тему Кыргызстан
Презентация на тему Кыргызстан  Реализм в русской литературе 19 века
Реализм в русской литературе 19 века Трансформация идеологий современного российского общества в условиях концептуальной неопределенности
Трансформация идеологий современного российского общества в условиях концептуальной неопределенности Геохимия геологических систем
Геохимия геологических систем  Инновационные строительные материалы. Инновации технологий минеральных вяжущих веществ и бетонов на их основе
Инновационные строительные материалы. Инновации технологий минеральных вяжущих веществ и бетонов на их основе Презентация Своя Игра
Презентация Своя Игра Составление бизнес-плана
Составление бизнес-плана Презентация "Секреты мозаики" - скачать презентации по МХК
Презентация "Секреты мозаики" - скачать презентации по МХК Гигиеническая характеристика окружающей среды в современных условиях. Физические свойства воздуха и их гигиеническое значение
Гигиеническая характеристика окружающей среды в современных условиях. Физические свойства воздуха и их гигиеническое значение Правовой режим земель и земельных участков
Правовой режим земель и земельных участков Презентация на тему "Проект совместной деятельности воспитателей, детей старшего возраста и родителей по патриотическому восп
Презентация на тему "Проект совместной деятельности воспитателей, детей старшего возраста и родителей по патриотическому восп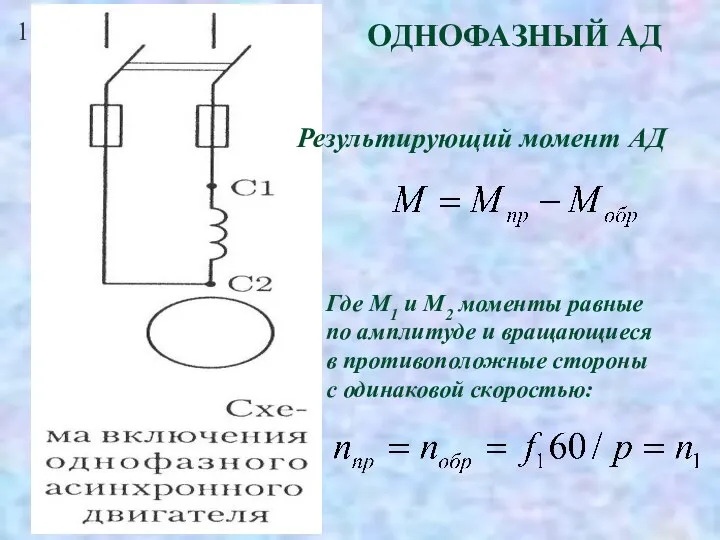 Однофазный АД
Однофазный АД Презентация Школы человеческих отношений и поведенческих наук
Презентация Школы человеческих отношений и поведенческих наук Часы в технике квиллинг. Что такое квиллинг?
Часы в технике квиллинг. Что такое квиллинг? Опорно-двигательная система человека Гейс Евгений 11 А
Опорно-двигательная система человека Гейс Евгений 11 А  Сервисы сети Интернет
Сервисы сети Интернет Строительные конструкции. Сущность железобетона
Строительные конструкции. Сущность железобетона Этика и деонтология в медицине Приемное отделение, 2014
Этика и деонтология в медицине Приемное отделение, 2014  Опухоли
Опухоли Тхэквондо - вид корейского боевого искусства
Тхэквондо - вид корейского боевого искусства Жилая среда
Жилая среда Реконструкция зданий и сооружений
Реконструкция зданий и сооружений Права и свободы человека и гражданина
Права и свободы человека и гражданина Переработка каменного угля
Переработка каменного угля Современные способы активизации обучения
Современные способы активизации обучения Лекция 1. Образовательная политика в России. Основные направления модернизации образования. План 1. Роль государства и обще
Лекция 1. Образовательная политика в России. Основные направления модернизации образования. План 1. Роль государства и обще Творческая группа МОУООШ № 4г.Бикина
Творческая группа МОУООШ № 4г.Бикина Спорт. Виды спорта
Спорт. Виды спорта