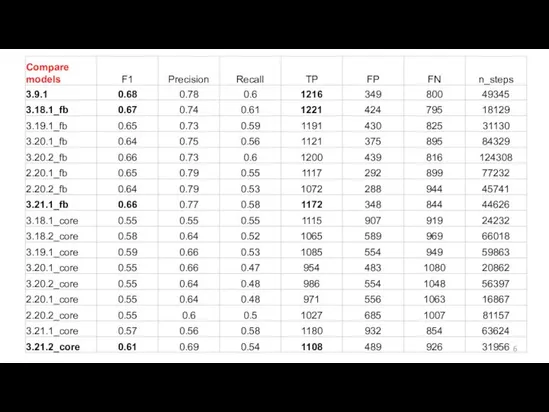
- Sideview models

Содержание
- 2. Annotations
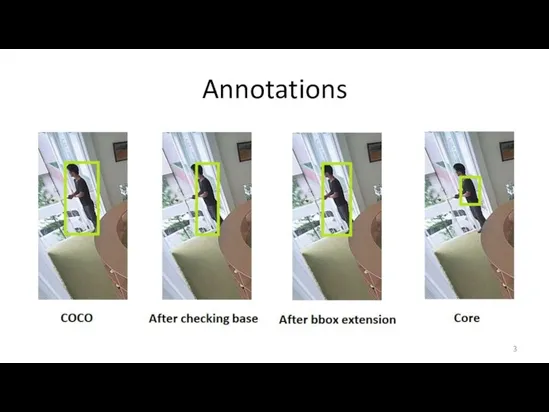
- 3. Annotations
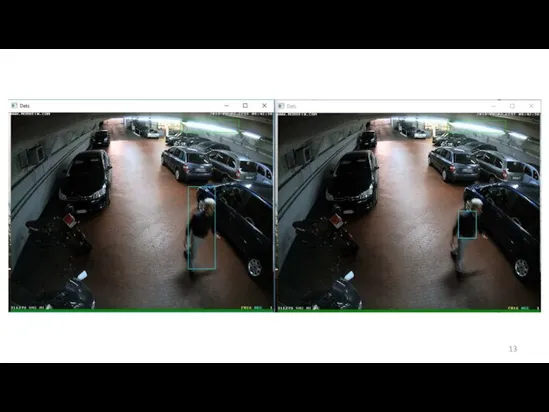
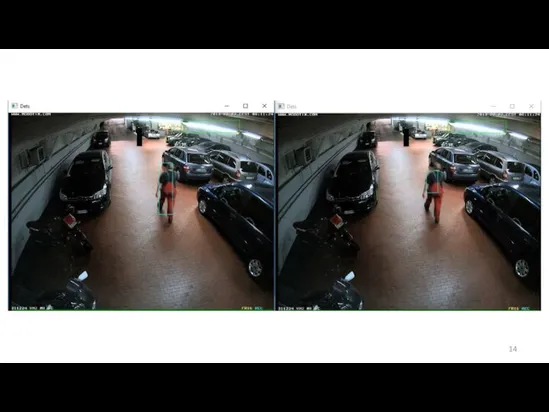
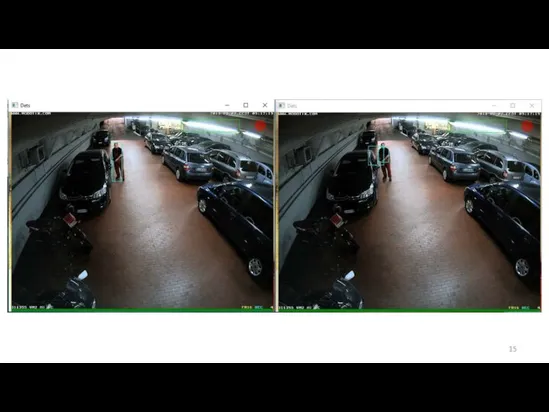
- 4. Fullbody vs Core
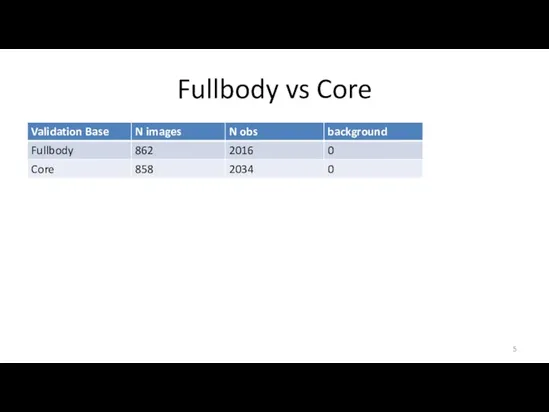
- 5. Fullbody vs Core
- 7. Evaluation metrics Multiple Object Tracking Accuracy where is the frame index and GT is the number
- 8. Fullbody vs Core
- 16. Test with different size of training base
- 17. Future work Look for a more suitable architecture Inception modifications MobileNet with Feature Pyramid Networks
- 18. Inception model v2
- 20. Скачать презентацию
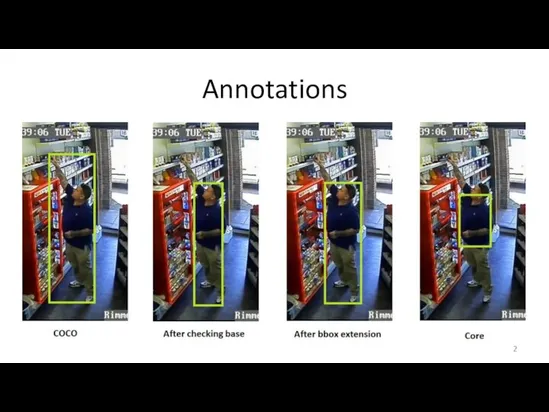
Annotations
Annotations
Annotations
Annotations
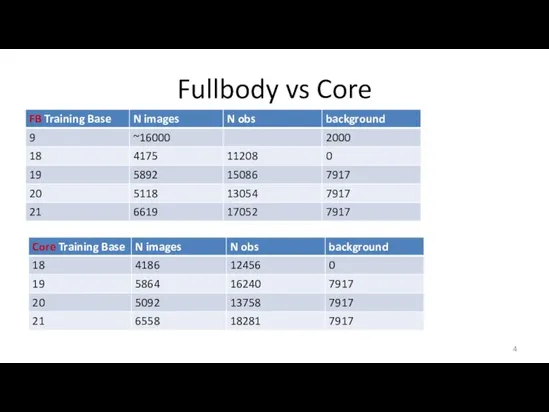
Fullbody vs Core
Fullbody vs Core
Fullbody vs Core
Fullbody vs Core
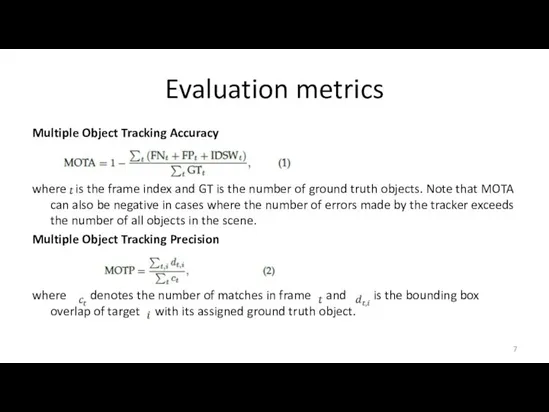
Evaluation metrics
Multiple Object Tracking Accuracy
where is the frame index and GT
Evaluation metrics
Multiple Object Tracking Accuracy
where is the frame index and GT
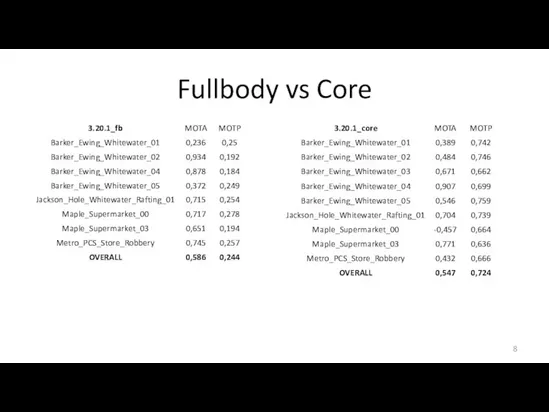
Fullbody vs Core
Fullbody vs Core


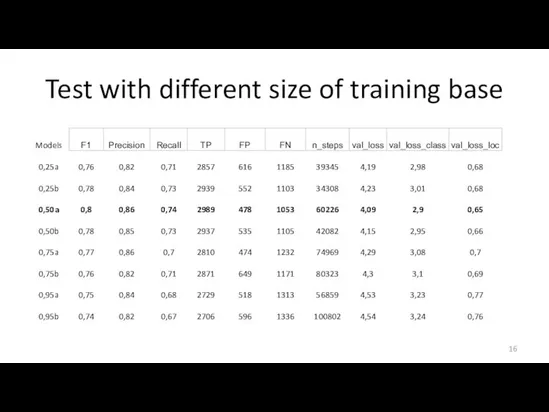
Test with different size of training base
Test with different size of training base
Future work
Look for a more suitable architecture
Inception modifications
MobileNet with Feature Pyramid
Future work
Look for a more suitable architecture
Inception modifications
MobileNet with Feature Pyramid
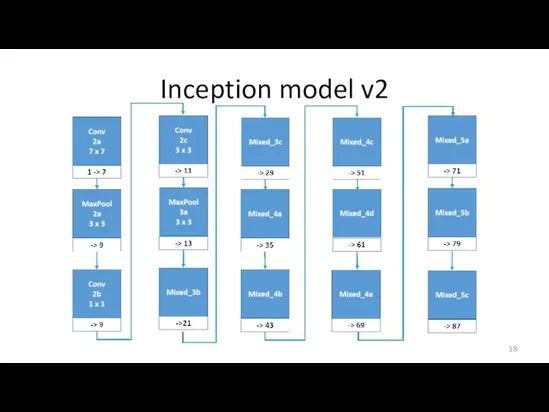
Inception model v2
Inception model v2
 ПЛАНИРОВАНИЕ ЭКСПЛУАТАЦИОННЫХ РАСХОДОВ ЖЕЛЕЗНЫХ ДОРОГ
ПЛАНИРОВАНИЕ ЭКСПЛУАТАЦИОННЫХ РАСХОДОВ ЖЕЛЕЗНЫХ ДОРОГ Глобальные проблемы человечества
Глобальные проблемы человечества  Обучение подбору проверочных слов для н_п
Обучение подбору проверочных слов для н_п Способы представления гармонических колебаний
Способы представления гармонических колебаний  Культура 19 века
Культура 19 века Кафедра нормальной физиологии КрасГМА проф. Ю.И. Савченков Лекция 13 ФИЗИОЛОГИЯ ВЕГЕТАТИВНОЙ НЕРВНОЙ СИСТЕМЫ 1801 - М. Биша - ВЕГЕТ
Кафедра нормальной физиологии КрасГМА проф. Ю.И. Савченков Лекция 13 ФИЗИОЛОГИЯ ВЕГЕТАТИВНОЙ НЕРВНОЙ СИСТЕМЫ 1801 - М. Биша - ВЕГЕТ Спрос, закон спроса, эластичность спроса
Спрос, закон спроса, эластичность спроса Космогонические теории происхождения Солнечной системы
Космогонические теории происхождения Солнечной системы Жорж-Пьер Сёра
Жорж-Пьер Сёра  Международно признанные Транспортные коридоры Выполнила студентка 4-го курса группа ДС-04 УЛАН КЫЗЫ АЙГЕРИМ
Международно признанные Транспортные коридоры Выполнила студентка 4-го курса группа ДС-04 УЛАН КЫЗЫ АЙГЕРИМ Международное сотрудничество в сфере противодействия коррупции (Тема 9)
Международное сотрудничество в сфере противодействия коррупции (Тема 9) ЦЕМЕНТИРОВАНИЕ СКВАЖИНЫ
ЦЕМЕНТИРОВАНИЕ СКВАЖИНЫ  Построение линии пересечения кривых поверхностей
Построение линии пересечения кривых поверхностей Каюм Насыйриның ”Татар этнографиясе материалларына нигезләнеп, Исергәп авылының борынгы милли киемнәрен өйрәнү
Каюм Насыйриның ”Татар этнографиясе материалларына нигезләнеп, Исергәп авылының борынгы милли киемнәрен өйрәнү ПРОГРАММА Духовно – нравственного воспитания личности Без духовной любви всякое обучение бесполезно. С.А. Назарбаева
ПРОГРАММА Духовно – нравственного воспитания личности Без духовной любви всякое обучение бесполезно. С.А. Назарбаева Гипертрофическая КАРДИОМИОПАТИЯ Исполнитель: Акопян Айк ОЛД - 410
Гипертрофическая КАРДИОМИОПАТИЯ Исполнитель: Акопян Айк ОЛД - 410 Украинская библиотечная ассоциация Крымское республиканское учреждение «Универсальная научная библиотека им. И. Я. Франко» Регио
Украинская библиотечная ассоциация Крымское республиканское учреждение «Универсальная научная библиотека им. И. Я. Франко» Регио Терминалы
Терминалы paragraf_7_klass_INV
paragraf_7_klass_INV Рыночная оценка жилого дома при разделе имущества
Рыночная оценка жилого дома при разделе имущества Тема: Агропромышленный комплекс Российской Федерации, сегодня и завтра. Введение 1.Современная ситуация в агропромышленном к
Тема: Агропромышленный комплекс Российской Федерации, сегодня и завтра. Введение 1.Современная ситуация в агропромышленном к Презентация "Житие" - скачать презентации по МХК
Презентация "Житие" - скачать презентации по МХК Вертикальное озеленение территории
Вертикальное озеленение территории Работа со строками
Работа со строками Русские народные ремёсла
Русские народные ремёсла Методы оценки экономической эффективности инвестиционных проектов. Тема 3
Методы оценки экономической эффективности инвестиционных проектов. Тема 3 Презентация на тему "6 гр. МАДОУ д.с. №65 Презентация зоны психологической разгрузки" - скачать презентации по Педагогике
Презентация на тему "6 гр. МАДОУ д.с. №65 Презентация зоны психологической разгрузки" - скачать презентации по Педагогике Использование игровых технологий на уроках географии Учитель истории и географии МБОУ СОШ № 266 г. Снежногорска .
Использование игровых технологий на уроках географии Учитель истории и географии МБОУ СОШ № 266 г. Снежногорска .