- Синтез и анализ систем автоматического управления следящих систем на судах

Содержание
- 2. СИНТЕЗ И АНАЛИЗ САУ СЛЕДЯЩИХ СИСТЕМ
- 3. Целью данной курсовой работы является приобретение навыков составления и преобразования структурных схем, синтеза систем автоматического управления
- 4. Морская интеллектуальная система (МИС) стабилизации качки судна (СКС) с помощью перекладки руля предназначена для уменьшения качки
- 5. Рисунок 1 - Функциональная схемы следящей системы
- 6. 1.Описание СС с помощью ДУ
- 7. Рисунок 2 - Блоки структурной схемы, составленные по уравнениям 2.Составление структурной схемы СС
- 8. Из структурной схемы находим передаточную функцию неизменяемой части разомкнутой СС. Проводим поэтапное сворачивание структурной схемы После
- 9. Рисунок 3 - ЛАЧХ 3. Построение ЛАЧХ неизменяемой части следящей системы
- 10. Если бы ЛАЧХ LНЧ везде совпала бы с желаемой ЛАЧХ LЖ , то корректирующего устройства не
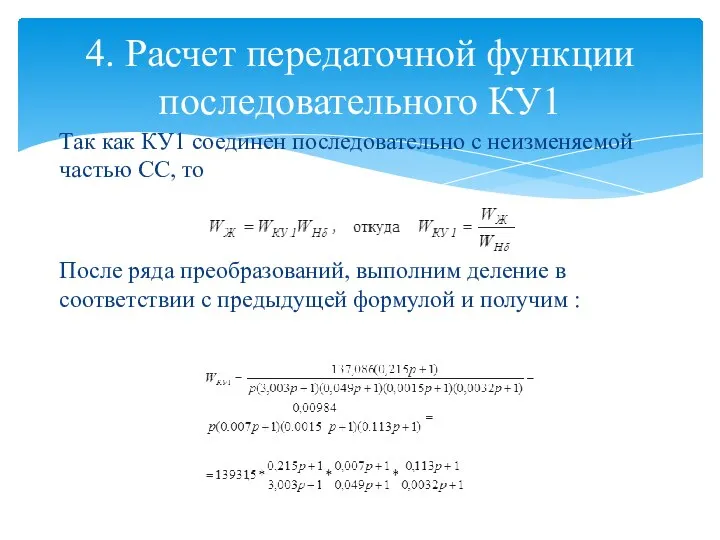
- 11. 4. Расчет передаточной функции последовательного КУ1 Так как КУ1 соединен последовательно с неизменяемой частью СС, то
- 12. Схема КУ1 будет состоять из последовательно соединенных простейших блоков, каждый из которых реализует одну из простейших
- 13. Рисунок 9 - Принципиальная электрическая схем КУ1
- 14. Выводы СС может нормально функционировать при введении только КУ1 . Общий коэффициент усиления схем на ОУ1…ОУ3
- 16. Скачать презентацию
СИНТЕЗ И АНАЛИЗ САУ СЛЕДЯЩИХ СИСТЕМ
СИНТЕЗ И АНАЛИЗ САУ СЛЕДЯЩИХ СИСТЕМ
Целью данной курсовой работы является приобретение навыков составления и преобразования структурных
Целью данной курсовой работы является приобретение навыков составления и преобразования структурных
Морская интеллектуальная система (МИС) стабилизации качки судна (СКС) с помощью перекладки
Морская интеллектуальная система (МИС) стабилизации качки судна (СКС) с помощью перекладки
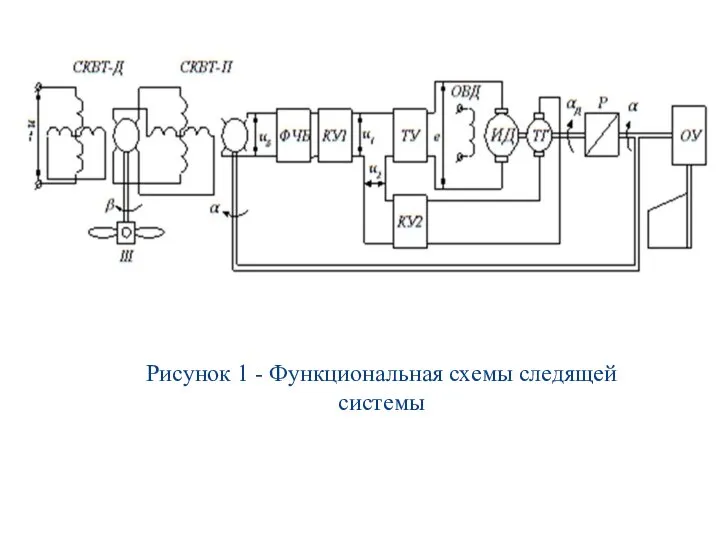
Рисунок 1 - Функциональная схемы следящей системы
Рисунок 1 - Функциональная схемы следящей системы

1.Описание СС с помощью ДУ
1.Описание СС с помощью ДУ

Рисунок 2 - Блоки структурной схемы, составленные по уравнениям
2.Составление структурной схемы
2.Составление структурной схемы
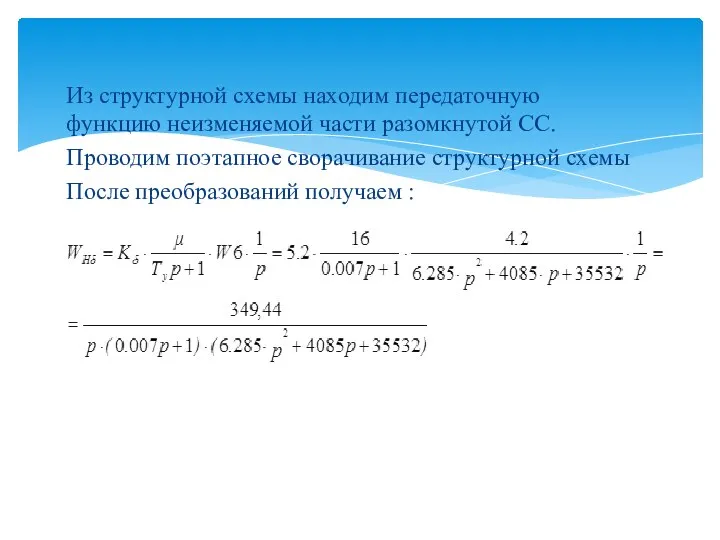
Из структурной схемы находим передаточную функцию неизменяемой части разомкнутой СС.
Проводим поэтапное
Из структурной схемы находим передаточную функцию неизменяемой части разомкнутой СС.
Проводим поэтапное
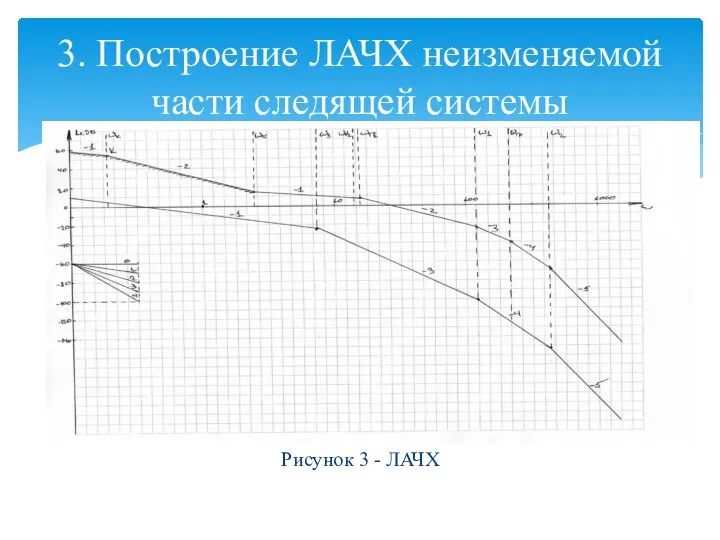
Рисунок 3 - ЛАЧХ
3. Построение ЛАЧХ неизменяемой части следящей системы
Рисунок 3 - ЛАЧХ
3. Построение ЛАЧХ неизменяемой части следящей системы

Если бы ЛАЧХ LНЧ везде совпала бы с желаемой ЛАЧХ LЖ
Если бы ЛАЧХ LНЧ везде совпала бы с желаемой ЛАЧХ LЖ
4. Расчет передаточной функции последовательного КУ1
Так как КУ1 соединен последовательно с
4. Расчет передаточной функции последовательного КУ1
Так как КУ1 соединен последовательно с
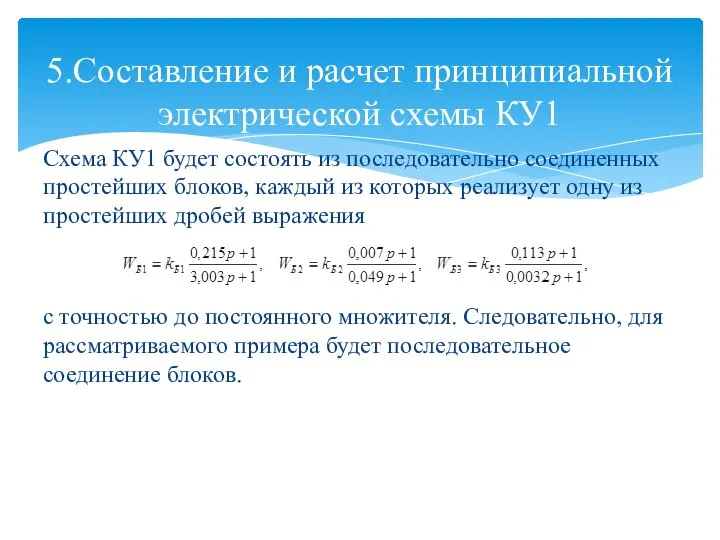
Схема КУ1 будет состоять из последовательно соединенных простейших блоков, каждый из
Схема КУ1 будет состоять из последовательно соединенных простейших блоков, каждый из

Рисунок 9 - Принципиальная электрическая схем КУ1
Рисунок 9 - Принципиальная электрическая схем КУ1

Выводы
СС может нормально функционировать при введении только КУ1 .
Общий коэффициент
Выводы
СС может нормально функционировать при введении только КУ1 .
Общий коэффициент
 Образовательная программа как результативно-целевая основа деятельности ОУ Николаева Н.А., зам. директора МОУ «Кочневская СОШ» 4
Образовательная программа как результативно-целевая основа деятельности ОУ Николаева Н.А., зам. директора МОУ «Кочневская СОШ» 4 «Обучение чтению (глобальному и аналитическому) детей с нарушением слуха на занятиях по развитию речи по программе «Общение» Э.И.
«Обучение чтению (глобальному и аналитическому) детей с нарушением слуха на занятиях по развитию речи по программе «Общение» Э.И. Цифровая обработка сигналов и изображений
Цифровая обработка сигналов и изображений Мероприятия для сплочения коллектива. Тимбилдинг
Мероприятия для сплочения коллектива. Тимбилдинг OCS&Vending COFFEE CORNER GUIDELINES-converted
OCS&Vending COFFEE CORNER GUIDELINES-converted ПАРАДИГМА ДОКАЗАТЕЛЬНОЙ МЕДИЦИНЫ А.В.Борцов Отделение научно-медицинской информации
ПАРАДИГМА ДОКАЗАТЕЛЬНОЙ МЕДИЦИНЫ А.В.Борцов Отделение научно-медицинской информации  Множественное наследование
Множественное наследование «Нестандартное творчество» Поздеев Андрей Геннадьевич (1926-1998)
«Нестандартное творчество» Поздеев Андрей Геннадьевич (1926-1998) Иммунитеты и привилегии предоставляемые зарубежным органам внешних сношений государств и их персоналу
Иммунитеты и привилегии предоставляемые зарубежным органам внешних сношений государств и их персоналу Презентация Деловые переговоры
Презентация Деловые переговоры معطر الجو(الهواء) يستعمل معطر الجو لتلطيف الرائحة االستعمال للحمامات او الغرف
معطر الجو(الهواء) يستعمل معطر الجو لتلطيف الرائحة االستعمال للحمامات او الغرف Презентация "Художественная культура Среднего Востока" - скачать презентации по МХК
Презентация "Художественная культура Среднего Востока" - скачать презентации по МХК Религии
Религии Классы, объекты, поля и методы. (Лекция 4)
Классы, объекты, поля и методы. (Лекция 4) Презентация Жалоба и представление на приговор, определение, постановление суда
Презентация Жалоба и представление на приговор, определение, постановление суда Презентация Льготы по уплате таможенных сборов
Презентация Льготы по уплате таможенных сборов Классы. ООП в Java. Конструкторы. Блоки инициализации.
Классы. ООП в Java. Конструкторы. Блоки инициализации. Процедуры и функции
Процедуры и функции ВИДЫ ТРЕУГОЛЬНИКОВ
ВИДЫ ТРЕУГОЛЬНИКОВ Выпуклый анализ. Теоремы об отделимости выпуклых множеств. Лекция 17
Выпуклый анализ. Теоремы об отделимости выпуклых множеств. Лекция 17 Телекоммуникационные сети
Телекоммуникационные сети Презентация Современные демографические проблемы России и пути их решения_
Презентация Современные демографические проблемы России и пути их решения_ Ядерный автомобильный двигатель
Ядерный автомобильный двигатель Издержки и доходы фирмы
Издержки и доходы фирмы «Последовательности» Презентация-урок по алгебре по теме:
«Последовательности» Презентация-урок по алгебре по теме:  Тренинг для участников IV Международной Модели ООН СКФУ
Тренинг для участников IV Международной Модели ООН СКФУ Подлежащее и грамматические средства его выражения 3 класс Программа «ПЛАНЕТА ЗНАНИЙ» Подготовила учитель начальных классов Г
Подлежащее и грамматические средства его выражения 3 класс Программа «ПЛАНЕТА ЗНАНИЙ» Подготовила учитель начальных классов Г Сквозь зеркала. Игра
Сквозь зеркала. Игра