- Системы искусственного интеллекта

Содержание
- 2. Литература Рассел С., Норвиг П. Искусственный интеллект: современный подход. – М.: Вильямс, 2006. – 1408 с.
- 3. Предыстория ИИ Философия основы ИИ, сформулировав идеи, что мозг в определенных отношениях напоминает машину, оперирует знаниями,
- 4. Краткая история ИИ 1943 McCulloch & Pitts: Boolean circuit model of brain 1950 Turing's "Computing Machinery
- 5. Что такое ИИ?
- 6. Системы, которые действуют подобно людям Turing (1950) "Computing machinery and intelligence": Возможности, которыми должен обладать компьютер:
- 7. Системы, которые думают подобно людям Существует 3 способа узнать, как думает человек: интроспекция — попытка проследить
- 8. Системы, которые думают рационально Аристотель – законы «правильного мышления». Его силлогизмы стали образцом для создания процедур
- 9. Системы, которые действуют рационально Агентом считается все, что действует («агент» произошло от латинского «agere», действовать).Рациональный агент
- 10. Системы, которые действуют рационально Преимущества подхода: более общий по сравнению с подходом на основе «законов мышления»,
- 11. Различные подходы к построению систем ИИ Логический Структурный Эволюционный Имитационный Агентно-ориентированный подход
- 12. Логический подход Основа - Булева алгебра и исчисление предикатов. Практически каждая система ИИ, построенная на логическом
- 13. Структурный подход Попытки построения ИИ путем моделирования структуры человеческого мозга. Одной из первых таких попыток был
- 14. Эволюционный подход Основное внимание уделяется построению начальной модели и правилам, по которым она может изменяться (эволюционировать).
- 15. Имитационный подход Это классический подход для кибернетики с одним из ее базовых понятий — "черным ящиком".
- 16. Агентно-ориентированный подход Основан на использовании интеллектуальных (рациональных) агентов. Интеллект — это вычислительная часть (грубо говоря, планирование)
- 17. Современное состояние разработок Robotic vehicles: A driverless robotic car named STANLEY sped through the rough terrain
- 18. Умные машины: до "судного дня" осталось недолго (http://top.rbc.ru/economics/31/01/2013/842964.shtml)
- 19. Живое железо Сегодня появление таких технологических новинок, как распознающий движения контроллер Kinect от Microsoft, на некоторое
- 20. Картинка на ощупь Уже в ближайшие пять лет, уверены разработчики из IBM, компьютеры совершат мощный прорыв
- 21. Пиксель знает Разработчики IBM сетуют, что компьютеры сегодня понимают смысл изображения только по текстовым тегам и
- 22. Ухо искусственного разума У человеческого слухового аппарата тоже в скором времени появится компьютерный конкурент. В течение
- 23. Компьютер-поварешка Исследователи IBM уверены: здоровая пища должна быть вкусной! Они разрабатывают компьютерную систему - по сути,
- 24. Лови мое дыхание …И вот опять простуда. И вроде бы Минздрав предупреждал, и старались обходить стороной
- 25. Человек-проводник Разработчики IT-инноваций постоянно твердят о сближении виртуального мира и реального, об очеловечивании машины. Но такая
- 26. Интеллектуальные агенты
- 27. Агенты и варианты среды Агентом является все, что может рассматриваться как воспринимающее свою среду с помощью
- 28. Агенты и варианты среды Термин «восприятие» используется для обозначения полученных агентом сенсорных данных в любой конкретный
- 29. Пример. Мир пылесоса Восприятие: местоположение (в каком квадрате он находится); состояние квадрата (есть ли мусор в
- 30. Качественное поведение: концепция рациональности Рациональным агентом является такой агент, который выполняет правильные действия; или более формально,
- 31. Показатели производительности Показатели производительности воплощают в себе критерии оценки успешного поведения агента. Последовательность действий агента вынуждает
- 32. Агент-пылесос Показатель производительности??? Рекомендация: лучше всего разрабатывать показатели производительности в соответствии с тем, чего действительно необходимо
- 33. Рациональность Зависит от следующих факторов: • Показатели производительности, которые определяют критерии успеха. • Знания агента о
- 34. Всезнание, обучение и автономность 1. Необходимо различать рациональность и всезнание. Рациональность — это максимизация ожидаемой производительности,
- 35. Определение проблемной среды Факторы, определяющие проблемную среду: производительность; среда; исполнительные механизмы; датчики. PEAS (Performance measure, Environment,
- 36. Примеры типов агентов и их описаний
- 37. Свойства проблемной среды • Полностью наблюдаемая или частично наблюдаемая (если датчики агента предоставляют ему доступ к
- 38. Свойства проблемной среды • Статическая или динамическая (если среда может измениться в ходе того, как агент
- 39. Какова среда реального мира? Полностью наблюдаемая или частично наблюдаемая? Детерминированная или стохастическая? Эпизодическая или последовательная? Статическая
- 40. Недостаток: Если P – множество актов восприятия, T – срок существования агента (общее количество актов восприятия,
- 41. Простые рефлексные агенты Агенты выбирают действия на основе текущего акта восприятия, игнорируя всю остальную историю актов
- 42. Простые рефлексные агенты Недостаток – агент работает, только если правильное решение может быть принято на основе
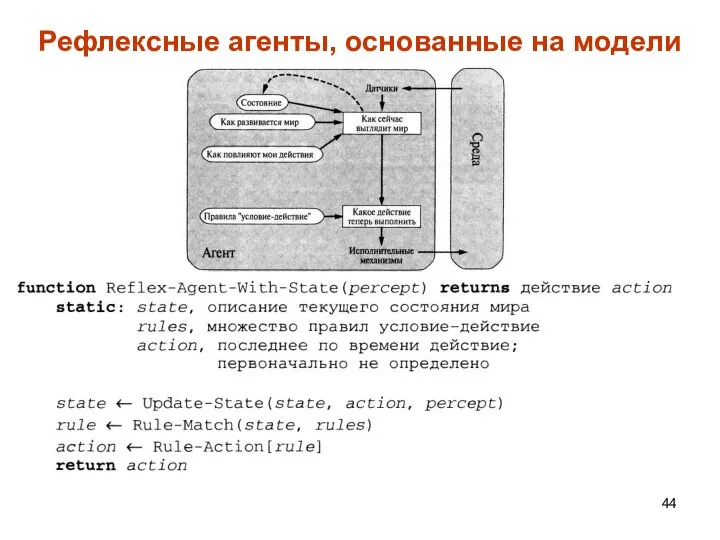
- 43. Рефлексные агенты, основанные на модели Агент поддерживает внутреннее состояние, которое зависит от истории актов восприятия. Программа
- 44. Рефлексные агенты, основанные на модели
- 45. Агенты, основанные на цели
- 46. Агенты, основанные на полезности Функция полезности отображает состояние (или последовательность состояний) на вещественное число, которое обозначает
- 47. Обучающиеся агенты Основные компоненты: обучающийся компонент – отвечает за внесение усовершенствований; производительный компонент – обеспечивает выбор
- 48. Решение проблем посредством поиска
- 49. Агенты, решающие задачи Разновидность агентов, основанных на цели. Цели позволяют организовать поведение, ограничивая выбор промежуточных этапов,
- 50. Пример. Выходные в Румынии Currently in Arad. Flight leaves tomorrow from Bucharest Formulate goal: be in
- 51. Пример. Выходные в Румынии
- 52. Основные определения Процесс определения последовательности действий, которые приводят к достижению цели, называется поиском. Любой алгоритм поиска
- 53. Хорошо структурированные задачи и решения Задача может быть формально определена с помощью следующих компонентов: Начальное состояние,
- 54. Хорошо структурированные задачи и решения Проверка цели, позволяющая определить, является ли данное конкретное состояние целевым состоянием.
- 55. Пространство состояний для мира пылесоса
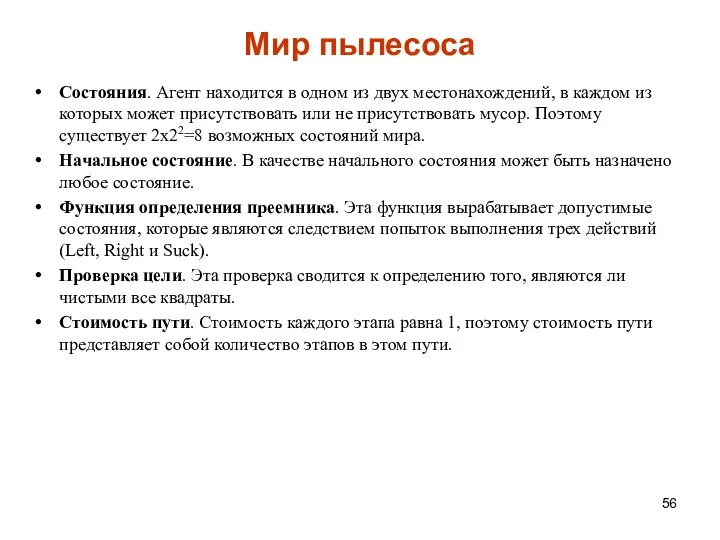
- 56. Мир пылесоса Состояния. Агент находится в одном из двух местонахождений, в каждом из которых может присутствовать
- 57. Задача игры в восемь Задача игры в восемь имеет 9!/2 = 181 440 достижимых состояний и
- 58. Поиск решений
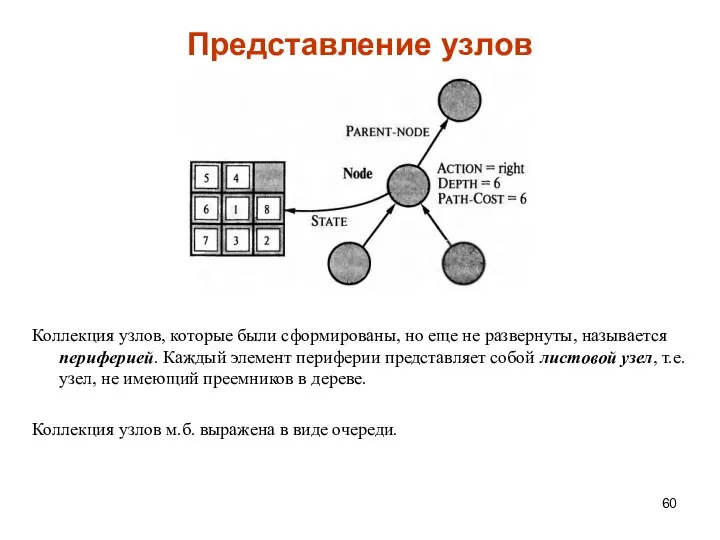
- 59. Представление узлов State. Состояние в пространстве состояний, которому соответствует данный узел. Parent-Node. Узел в дереве поиска,
- 60. Представление узлов Коллекция узлов, которые были сформированы, но еще не развернуты, называется периферией. Каждый элемент периферии
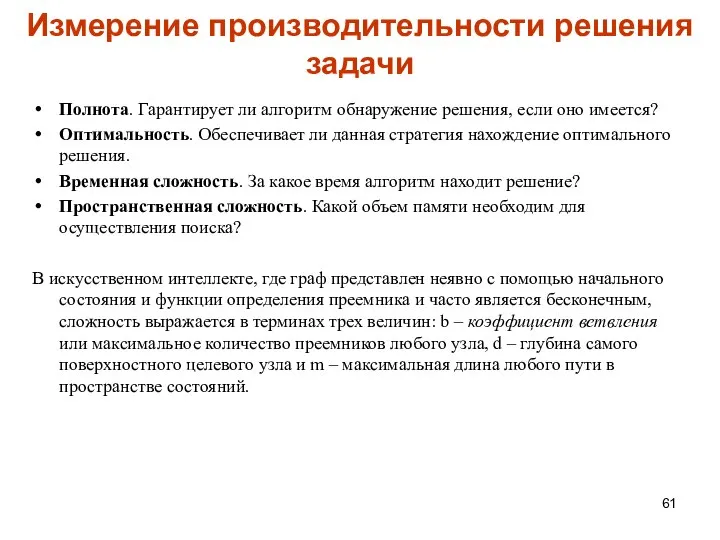
- 61. Измерение производительности решения задачи Полнота. Гарантирует ли алгоритм обнаружение решения, если оно имеется? Оптимальность. Обеспечивает ли
- 62. Стратегии неинформированного поиска Uninformed search strategies use only the information available in the problem definition. Breadth-first
- 63. Uninformed search strategies A search strategy is defined by picking the order of node expansion Strategies
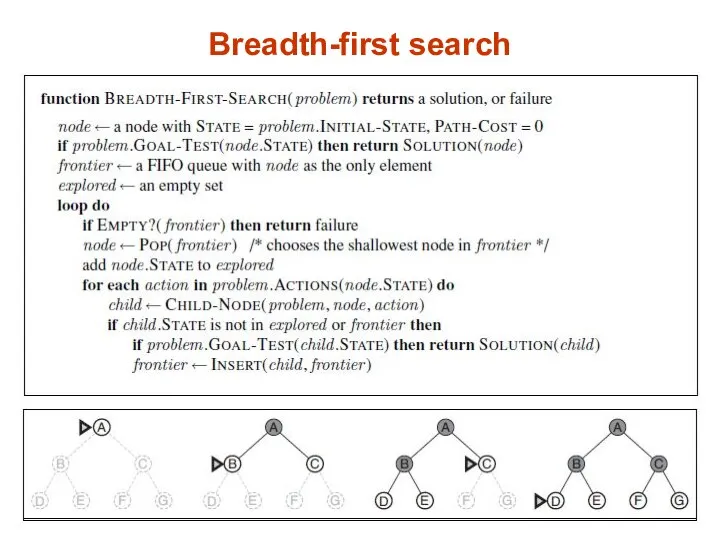
- 64. Breadth-first search Expand shallowest unexpanded node Frontier is a FIFO queue, i.e., new successors go at
- 65. Breadth-first search Expand shallowest unexpanded node Frontier is a FIFO queue, i.e., new successors go at
- 66. Breadth-first search Expand shallowest unexpanded node Frontier is a FIFO queue, i.e., new successors go at
- 67. Breadth-first search Expand shallowest unexpanded node Frontier is a FIFO queue, i.e., new successors go at
- 68. Breadth-first search
- 69. Properties of breadth-first search Complete? Yes (if b is finite) Time? 1+b+b2+b3+… +bd + b(bd-1) =
- 70. Uniform-cost search Expand least-cost unexpanded node Frontier is a queue ordered by path cost Equivalent to
- 71. Depth-first search Expand deepest unexpanded node. Frontier = LIFO queue, i.e., put successors at front
- 72. Properties of depth-first search Complete? No: fails in infinite-depth spaces, spaces with loops Modify to avoid
- 73. Depth-limited search = depth-first search with depth limit l, i.e., nodes at depth l have no
- 74. Iterative deepening search
- 75. Iterative deepening search
- 76. Iterative deepening search
- 77. Iterative deepening search
- 78. Iterative deepening search
- 79. Properties of iterative deepening search Complete? Yes Time? (d+1)b0 + d b1 + (d-1)b2 + …
- 80. Comparing uninformed search strategies
- 81. Стратегии информированного (эвристического) поиска Помимо определения задачи используются знания, относящиеся к данной к данной конкретной проблемной
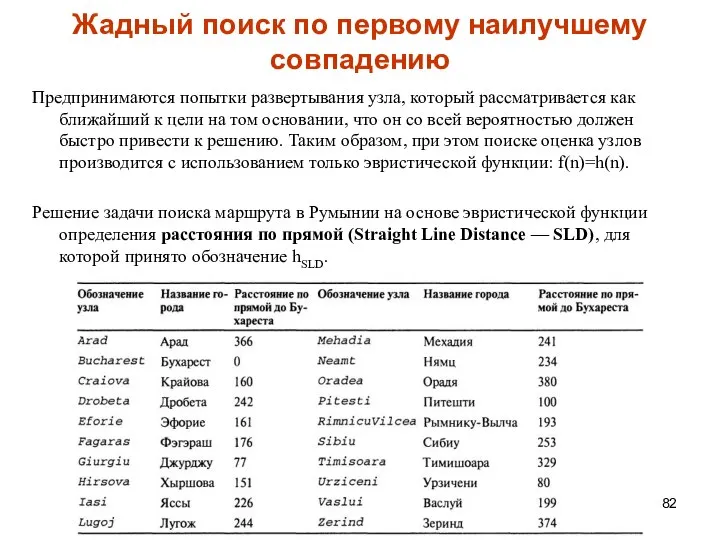
- 82. Жадный поиск по первому наилучшему совпадению Предпринимаются попытки развертывания узла, который рассматривается как ближайший к цели
- 83. Пример. Выходные в Румынии
- 84. Этапы жадного поиска пути до Бухареста
- 85. Этапы жадного поиска пути до Бухареста
- 86. Этапы жадного поиска пути до Бухареста
- 87. Этапы жадного поиска пути до Бухареста Найденное решение не оптимально: путь до Бухареста через города Сибиу
- 88. Свойства жадного поиска по наилучшему совпадению Complete? No – can get stuck in loops, e.g., Iasi
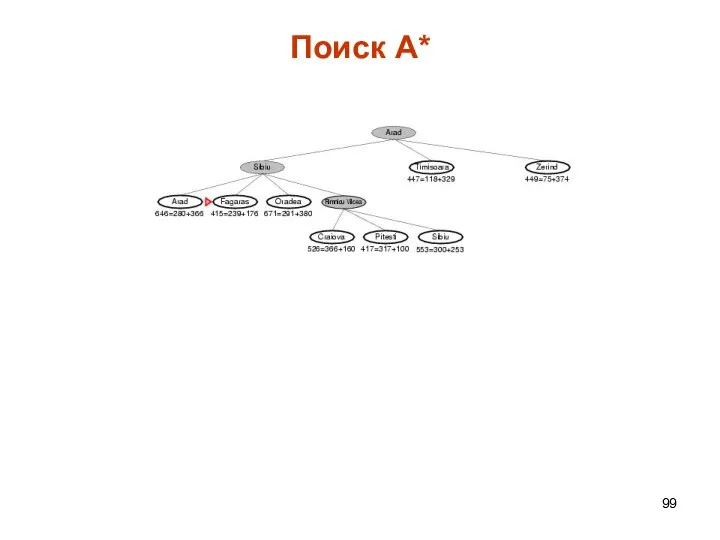
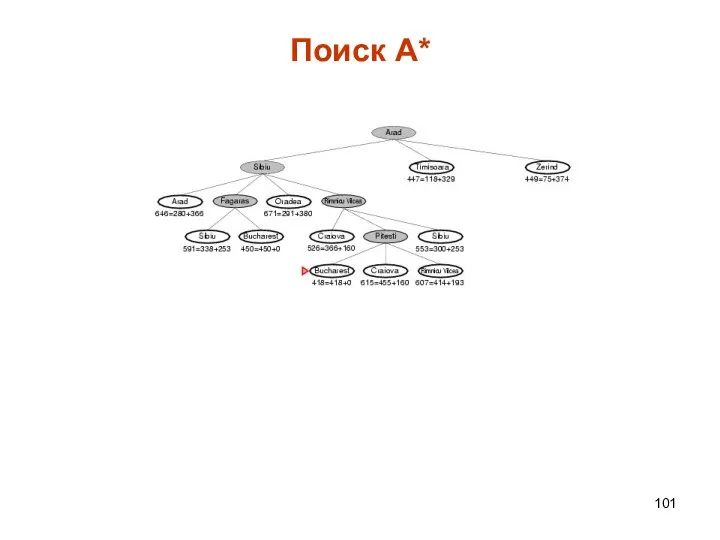
- 89. Поиск А* f(n) = g(n) + h(n) f(n) – оценка стоимости наименее дорогостоящего пути решения, проходящего
- 90. Условия оптимальности: допустимость и непротиворечивость An admissible heuristic is one that never overestimates the cost to
- 91. Поиск А* Поиск А* является оптимальным, при условии, что h(n) представляет собой допустимую эвристическую функцию, т.е.
- 92. Consistent (непротиворечивые) heuristics A heuristic is consistent if for every node n, every successor n' of
- 93. Optimality of A* (proof) Suppose some suboptimal goal G2 has been generated and is in the
- 94. Optimality of A* (proof) Suppose some suboptimal goal G2 has been generated and is in the
- 95. Поиск А* Предположим, что на периферии поиска появился неоптимальный целевой узел G2, а стоимость оптимального решения
- 96. Поиск А*
- 97. Поиск А*
- 98. Поиск А*
- 99. Поиск А*
- 100. Поиск А*
- 101. Поиск А*
- 102. Properties of A* Complete? Yes (unless there are infinitely many nodes with f ≤ f(G) )
- 103. Поиск А* Если С* представляет собой стоимость оптимального пути решения, то: • в поиске А* развертываются
- 104. Эвристические функции h1(n) = количество фишек, стоящих не на своем месте. h2(n) = сумма расстояний всех
- 105. Эвристические функции h1(n) = количество фишек, стоящих не на своем месте. h2(n) = сумма расстояний всех
- 106. Сравнение алгоритмов поиска
- 107. Доминирование If h2(n) ≥ h1(n) for all n (both admissible) then h2 dominates h1 h2 is
- 108. Поиск в условиях противодействия (Игры)
- 109. Game definition A game can be formally defined as a kind of search problem with the
- 110. Game tree (2-player, deterministic, turns)
- 111. Minimax Perfect play for deterministic games Idea: choose move to position with highest minimax value =
- 112. Minimax algorithm
- 113. Optimal decisions in multiplayer games
- 114. Properties of minimax Complete? Yes (if tree is finite) Optimal? Yes (against an optimal opponent) Time
- 115. α-β pruning example
- 116. α-β pruning example
- 117. α-β pruning example
- 118. α-β pruning example
- 119. α-β pruning example
- 120. Properties of α-β Pruning does not affect final result Good move ordering improves effectiveness of pruning
- 121. Why is it called α-β? α is the value of the best (i.e., highest-value) choice found
- 122. The α-β algorithm
- 123. Evaluation functions For chess, typically linear weighted sum of features Eval(s) = w1 f1(s) + w2
- 124. Планирование
- 125. Основы планирования Планированием называется процесс выработки последовательности действий, позволяющих достичь цели. Среда называется средой классического планирования,
- 126. Задача планирования Рассмотрим ситуацию, когда обычный агент, решающий задачи с помощью стандартных алгоритмов поиска (поиска в
- 127. Задача планирования Рассмотрим задачу покупки одного экземпляра англоязычного издания настоящей книги с названием «AI: A Modern
- 128. Задача планирования Сложность 2. Определение хорошей эвристической функции. Пусть цель агента – купить четыре разных книги.
- 129. Задача планирования Сложность 3. Неспособность к декомпозиции задачи. Например, задача доставки множества пакетов почты по соответствующим
- 130. Планирование с помощью поиска в пространстве состояний а) прямой (прогрессивный) поиск б) обратный (регрессивный) поиск в
- 131. Прямой поиск в пространстве состояний Формулировка задач планирования в виде задач поиска в пространстве состояний: Начальное
- 132. Обратный поиск в пространстве состояний Основное преимущество – позволяет рассматривать только релевантные действия. Действие релевантно конъюнктивной
- 133. Обратный поиск в пространстве состояний Поиск в обратном направлении называют регрессивным планированием. Основной вопрос регрессивного планирования
- 134. Обратный поиск в пространстве состояний Формирование преемников для обратного поиска. Допустим, что при наличии описания цели
- 135. Планирование с частичным упорядочением Недостаток прямого и обратного поиска в пространстве состояний – рассматриваются только строго
- 136. Пример задачи с надеванием пары туфель Goal(RightShoeOn ^ LeftShoeOn) Init() Action(RightShoe, Precond: RightSockOn, Effect: RightShoeOn) Action(RightSock,
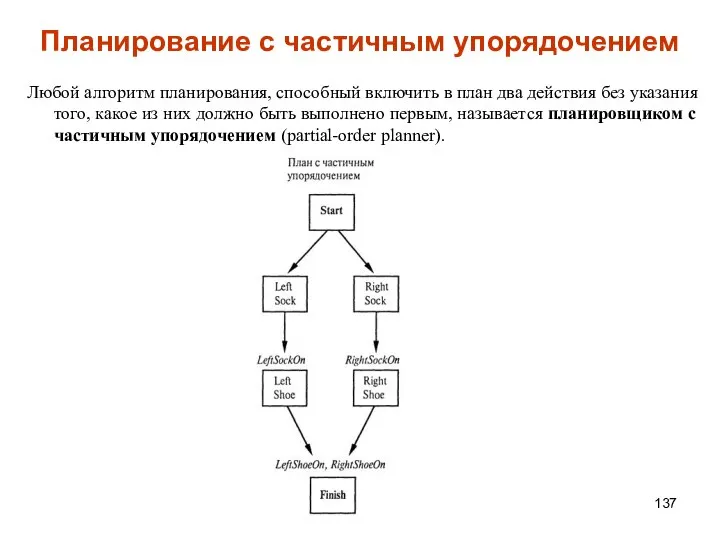
- 137. Планирование с частичным упорядочением Любой алгоритм планирования, способный включить в план два действия без указания того,
- 138. Линеаризация плана с частичным упорядочением Решение с частичным упорядочением соответствует шести возможным планам с полным упорядочением;
- 139. Планирование с частичным упорядочением Планирование с частичным упорядочением может быть реализовано в виде поиска в пространстве
- 140. Компоненты плана Множество действий, из которых состоят этапы плана. Эти действия берутся из множества действий в
- 141. Компоненты плана Множество причинных связей. Причинная связь между двумя действиями А и В в плане записывается
- 142. Пример задачи с надеванием пары туфель
- 143. Согласованный план Cогласованный план (consistent plan) – план, в котором не имеется циклов в ограничениях упорядочения
- 144. Формулировка задачи планирования Начальный план содержит действия Start и Finish, ограничение упорядочения Start - Функция определения
- 145. Формулировка задачи планирования В ходе проверки цели осуществляется проверка того, является ли текущий план решением первоначальной
- 146. Пример планирования с частичным упорядочением Пример задачи замены колеса со стертой покрышкой
- 147. Пример планирования с частичным упорядочением Поиск решения начинается с начального плана, содержащего действие Start с результатом
- 148. Пример планирования с частичным упорядочением 3. Взять предусловие ¬At (Flat, Axle) действия PutOn(Spare, Axle). Просто для
- 149. Пример планирования с частичным упорядочением 4. В этот момент единственным оставшимся открытым предусловием является предусловие At
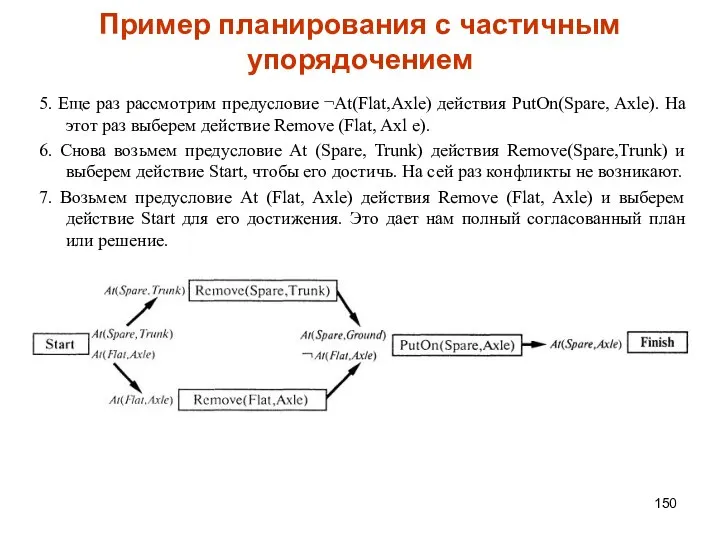
- 150. Пример планирования с частичным упорядочением 5. Еще раз рассмотрим предусловие ¬At(Flat,Axle) действия PutOn(Spare, Axle). На этот
- 151. Планирование действий в пространстве задач При решении сложных задач пользуются разбиением на подзадачи. Цель разбиения –
- 152. Планирование действий в пространстве задач Пример Маккарти. Ханойские башни. 3 колышка (1 2 3) и 3
- 153. Планирование действий в пространстве задач Заключительные вершины соответствуют элементарным задачам.
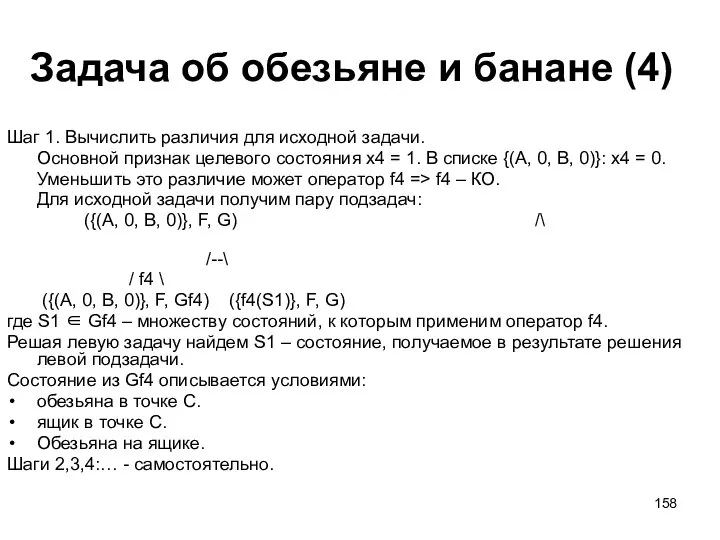
- 154. Применение ключевых операторов Пусть (S, F, G) – описание исходной задачи в пространстве состояний, g1, …,
- 155. Задача об обезьяне и банане (I) А - первоначальное нахождение обезьяны. B - первоначальное нахождение ящика.
- 156. Задача об обезьяне и банане (2) Решение. Очевидно, F = {f1, f2, f3, f4}. Действия и
- 157. Задача об обезьяне и банане (3) Конструируем правила переписывания: Подойти(y1) f1(x1, 0, x3, x4) --> (y1,
- 158. Задача об обезьяне и банане (4) Шаг 1. Вычислить различия для исходной задачи. Основной признак целевого
- 159. Планирование иерархической сети задач Метод планирования HTN (Hierarchical Task Network) рассматривает первоначальный план, который описывает задачу,
- 160. Планирование иерархической сети задач
- 161. Мультиагентное планирование Задача игры в парный теннис. Два агента играют в одной команде и могут присутствовать
- 162. Мультиагентное планирование Решением мультиагентной задачи планирования является совместный план (joint plan), состоящий из действий для каждого
- 163. Мультиагентное планирование Решение проблемы – координация
- 164. Механизмы кординации Простейший метод, с помощью которого группа агентов может обеспечить координацию при выполнении совместного плана,
- 165. Механизмы кординации Модель поведения птицеподобного агента (который иногда именуется орнитоидом или боидом от слова boid, или
- 166. Механизмы кординации При отсутствии применимого соглашения агенты могут использовать общение для получения общих знаний об осуществимом
- 167. Многоагентная система – это система, в которой несколько взаимодействующих интеллектуальных агентов пытаются совместно достичь некоторый набор
- 168. Свойства интеллектуального агента Агенты — это активные объекты (программные модули), которые могут инициировать целенаправленную деятельность по
- 169. Принципы конструирования агента на основе спецификаций FIPA FIPA (FOUNDATION FOR INTELLIGENT PHYSICAL AGENTS) –Международная федерация по
- 170. Пример взаимодействия агентов (1): отдыхающим назначена одна и та же процедура Входные данные: Для отдыхающего №
- 171. Пример взаимодействия агентов (2): отдыхающим назначены разные процедуры Входные данные: Для отдыхающего № 1 назначено две
- 172. Пример взаимодействия агентов (3): отдыхающим назначены две одинаковые процедуры Входные данные: Для отдыхающих № 1 и
- 174. Скачать презентацию

Литература
Рассел С., Норвиг П. Искусственный интеллект: современный подход. – М.: Вильямс,
Литература
Рассел С., Норвиг П. Искусственный интеллект: современный подход. – М.: Вильямс,

Предыстория ИИ
Философия основы ИИ, сформулировав идеи, что мозг в определенных отношениях напоминает
Предыстория ИИ
Философия основы ИИ, сформулировав идеи, что мозг в определенных отношениях напоминает

Краткая история ИИ
1943 McCulloch & Pitts: Boolean circuit model of brain
1950
Краткая история ИИ
1943 McCulloch & Pitts: Boolean circuit model of brain
1950
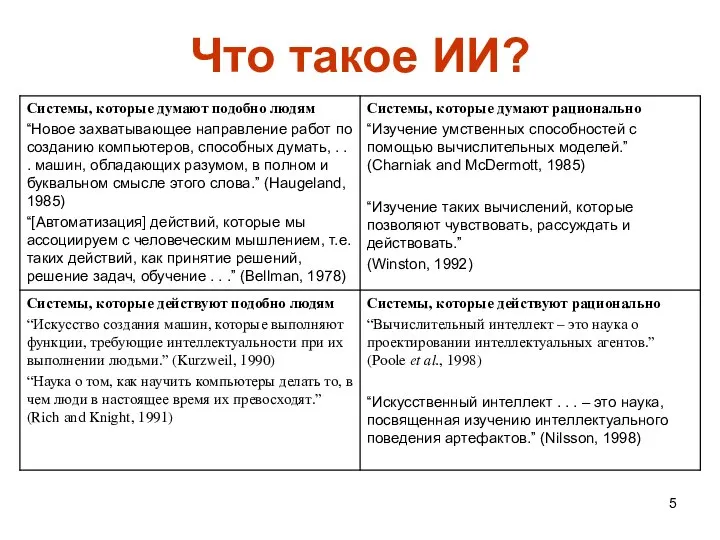
Что такое ИИ?
Что такое ИИ?
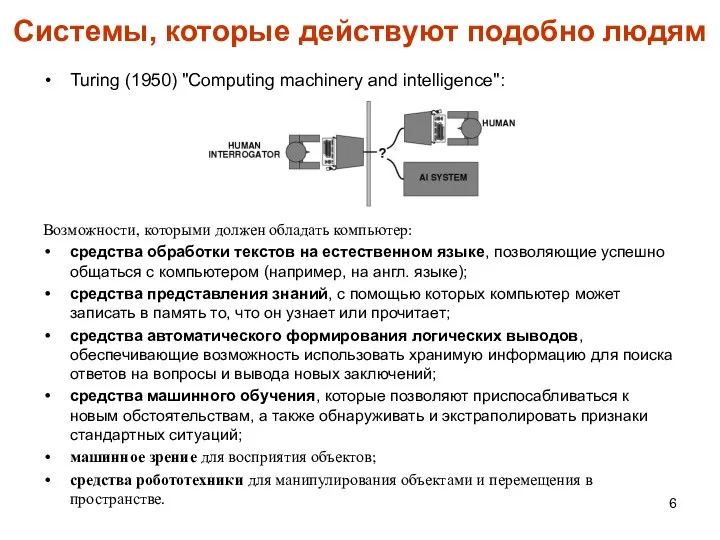
Системы, которые действуют подобно людям
Turing (1950) "Computing machinery and intelligence":
Возможности, которыми
Системы, которые действуют подобно людям
Turing (1950) "Computing machinery and intelligence":
Возможности, которыми

Системы, которые думают подобно людям
Существует 3 способа узнать, как думает человек:
Системы, которые думают подобно людям
Существует 3 способа узнать, как думает человек:

Системы, которые думают рационально
Аристотель – законы «правильного мышления».
Его силлогизмы стали образцом
Системы, которые думают рационально
Аристотель – законы «правильного мышления».
Его силлогизмы стали образцом

Системы, которые действуют рационально
Агентом считается все, что действует («агент» произошло от
Системы, которые действуют рационально
Агентом считается все, что действует («агент» произошло от

Системы, которые действуют рационально
Преимущества подхода:
более общий по сравнению с подходом
Системы, которые действуют рационально
Преимущества подхода:
более общий по сравнению с подходом

Различные подходы к построению систем ИИ
Логический
Структурный
Эволюционный
Имитационный
Агентно-ориентированный подход
Различные подходы к построению систем ИИ
Логический
Структурный
Эволюционный
Имитационный
Агентно-ориентированный подход
Логический подход
Основа - Булева алгебра и исчисление предикатов.
Практически каждая система ИИ,
Логический подход
Основа - Булева алгебра и исчисление предикатов.
Практически каждая система ИИ,
Структурный подход
Попытки построения ИИ путем моделирования структуры человеческого мозга. Одной из
Структурный подход
Попытки построения ИИ путем моделирования структуры человеческого мозга. Одной из

Эволюционный подход
Основное внимание уделяется построению начальной модели и правилам, по которым
Эволюционный подход
Основное внимание уделяется построению начальной модели и правилам, по которым

Имитационный подход
Это классический подход для кибернетики с одним из ее базовых
Имитационный подход
Это классический подход для кибернетики с одним из ее базовых

Агентно-ориентированный подход
Основан на использовании интеллектуальных (рациональных) агентов. Интеллект — это вычислительная
Агентно-ориентированный подход
Основан на использовании интеллектуальных (рациональных) агентов. Интеллект — это вычислительная

Современное состояние разработок
Robotic vehicles: A driverless robotic car named STANLEY sped
Современное состояние разработок
Robotic vehicles: A driverless robotic car named STANLEY sped

Умные машины: до "судного дня" осталось недолго
(http://top.rbc.ru/economics/31/01/2013/842964.shtml)
Умные машины: до "судного дня" осталось недолго
(http://top.rbc.ru/economics/31/01/2013/842964.shtml)

Живое железо
Сегодня появление таких технологических новинок, как распознающий движения контроллер
Живое железо
Сегодня появление таких технологических новинок, как распознающий движения контроллер
Картинка на ощупь
Уже в ближайшие пять лет, уверены разработчики из IBM,
Картинка на ощупь
Уже в ближайшие пять лет, уверены разработчики из IBM,
Пиксель знает
Разработчики IBM сетуют, что компьютеры сегодня понимают смысл изображения только
Пиксель знает
Разработчики IBM сетуют, что компьютеры сегодня понимают смысл изображения только

Ухо искусственного разума
У человеческого слухового аппарата тоже в скором времени появится
Ухо искусственного разума
У человеческого слухового аппарата тоже в скором времени появится
Компьютер-поварешка
Исследователи IBM уверены: здоровая пища должна быть вкусной! Они разрабатывают компьютерную
Компьютер-поварешка
Исследователи IBM уверены: здоровая пища должна быть вкусной! Они разрабатывают компьютерную

Лови мое дыхание
…И вот опять простуда. И вроде бы Минздрав предупреждал,
Лови мое дыхание
…И вот опять простуда. И вроде бы Минздрав предупреждал,
Человек-проводник
Разработчики IT-инноваций постоянно твердят о сближении виртуального мира и реального, об
Человек-проводник
Разработчики IT-инноваций постоянно твердят о сближении виртуального мира и реального, об

Интеллектуальные агенты
Интеллектуальные агенты

Агенты и варианты среды
Агентом является все, что может рассматриваться как воспринимающее
Агенты и варианты среды
Агентом является все, что может рассматриваться как воспринимающее
Агенты и варианты среды
Термин «восприятие» используется для обозначения полученных агентом
сенсорных
Агенты и варианты среды
Термин «восприятие» используется для обозначения полученных агентом
сенсорных
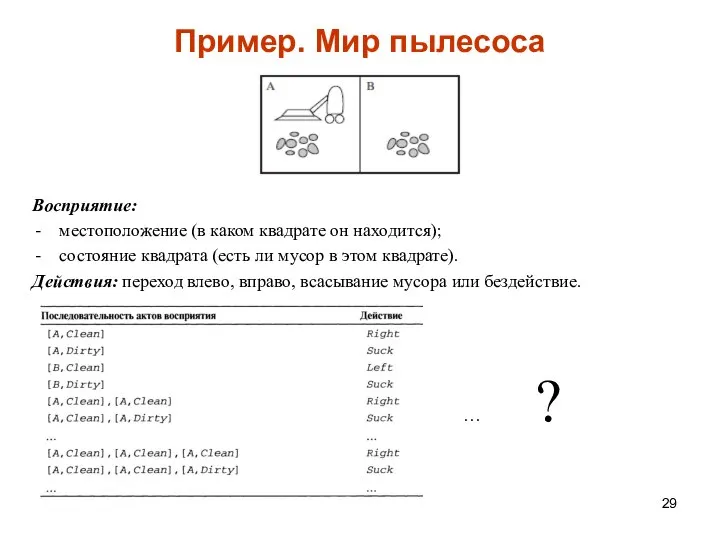
Пример. Мир пылесоса
Восприятие:
местоположение (в каком квадрате он находится);
состояние квадрата (есть
Пример. Мир пылесоса
Восприятие:
местоположение (в каком квадрате он находится);
состояние квадрата (есть

Качественное поведение: концепция рациональности
Рациональным агентом является такой агент, который выполняет правильные
Качественное поведение: концепция рациональности
Рациональным агентом является такой агент, который выполняет правильные

Показатели производительности
Показатели производительности воплощают в себе критерии оценки успешного поведения агента.
Показатели производительности
Показатели производительности воплощают в себе критерии оценки успешного поведения агента.

Агент-пылесос
Показатель производительности???
Рекомендация: лучше всего разрабатывать показатели производительности в соответствии с тем,
Агент-пылесос
Показатель производительности???
Рекомендация: лучше всего разрабатывать показатели производительности в соответствии с тем,

Рациональность
Зависит от следующих факторов:
• Показатели производительности, которые определяют критерии успеха.
• Знания
Рациональность
Зависит от следующих факторов:
• Показатели производительности, которые определяют критерии успеха.
• Знания
Всезнание, обучение и автономность
1. Необходимо различать рациональность и всезнание.
Рациональность — это
Всезнание, обучение и автономность
1. Необходимо различать рациональность и всезнание.
Рациональность — это
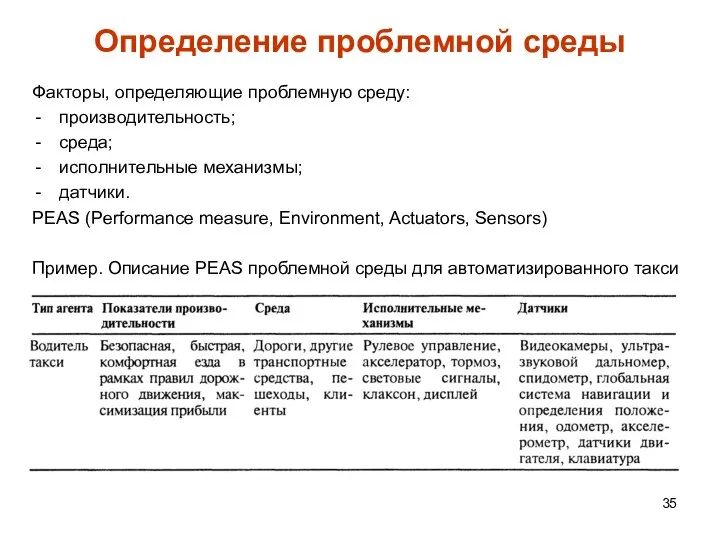
Определение проблемной среды
Факторы, определяющие проблемную среду:
производительность;
среда;
исполнительные механизмы;
датчики.
PEAS (Performance measure, Environment, Actuators,
Определение проблемной среды
Факторы, определяющие проблемную среду:
производительность;
среда;
исполнительные механизмы;
датчики.
PEAS (Performance measure, Environment, Actuators,
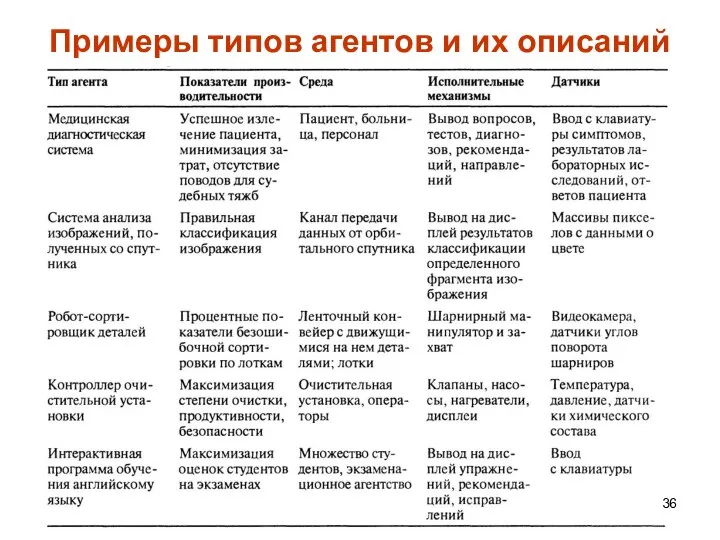
Примеры типов агентов и их описаний
Примеры типов агентов и их описаний

Свойства проблемной среды
• Полностью наблюдаемая или частично наблюдаемая (если датчики агента
Свойства проблемной среды
• Полностью наблюдаемая или частично наблюдаемая (если датчики агента

Свойства проблемной среды
• Статическая или динамическая (если среда может измениться в
Свойства проблемной среды
• Статическая или динамическая (если среда может измениться в

Какова среда реального мира?
Полностью наблюдаемая или частично наблюдаемая?
Детерминированная или стохастическая?
Эпизодическая или
Какова среда реального мира?
Полностью наблюдаемая или частично наблюдаемая?
Детерминированная или стохастическая?
Эпизодическая или

Недостаток:
Если P – множество актов восприятия, T – срок существования агента
Недостаток:
Если P – множество актов восприятия, T – срок существования агента

Простые рефлексные агенты
Агенты выбирают действия на основе текущего акта восприятия, игнорируя
Простые рефлексные агенты
Агенты выбирают действия на основе текущего акта восприятия, игнорируя

Простые рефлексные агенты
Недостаток – агент работает, только если правильное решение может
Простые рефлексные агенты
Недостаток – агент работает, только если правильное решение может

Рефлексные агенты, основанные на модели
Агент поддерживает внутреннее состояние, которое зависит от
Рефлексные агенты, основанные на модели
Агент поддерживает внутреннее состояние, которое зависит от
Рефлексные агенты, основанные на модели
Рефлексные агенты, основанные на модели

Агенты, основанные на цели
Агенты, основанные на цели
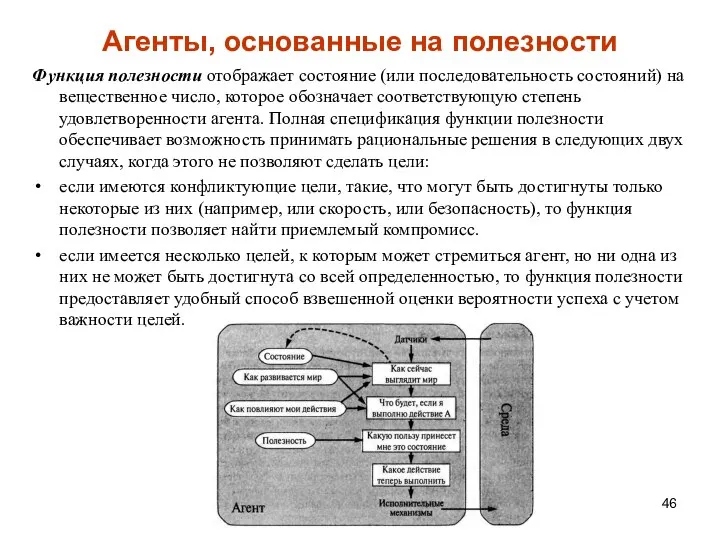
Агенты, основанные на полезности
Функция полезности отображает состояние (или последовательность состояний) на
Агенты, основанные на полезности
Функция полезности отображает состояние (или последовательность состояний) на

Обучающиеся агенты
Основные компоненты:
обучающийся компонент – отвечает за внесение усовершенствований;
производительный компонент –
Обучающиеся агенты
Основные компоненты:
обучающийся компонент – отвечает за внесение усовершенствований;
производительный компонент –

Решение проблем посредством поиска
Решение проблем посредством поиска

Агенты, решающие задачи
Разновидность агентов, основанных на цели.
Цели позволяют организовать поведение, ограничивая
Агенты, решающие задачи
Разновидность агентов, основанных на цели.
Цели позволяют организовать поведение, ограничивая
Пример. Выходные в Румынии
Currently in Arad.
Flight leaves tomorrow from Bucharest
Formulate goal:
be
Пример. Выходные в Румынии
Currently in Arad.
Flight leaves tomorrow from Bucharest
Formulate goal:
be

Пример. Выходные в Румынии
Пример. Выходные в Румынии

Основные определения
Процесс определения последовательности действий, которые приводят к достижению цели, называется
Основные определения
Процесс определения последовательности действий, которые приводят к достижению цели, называется

Хорошо структурированные задачи и решения
Задача может быть формально определена с помощью
Хорошо структурированные задачи и решения
Задача может быть формально определена с помощью

Хорошо структурированные задачи и решения
Проверка цели, позволяющая определить, является ли данное
Хорошо структурированные задачи и решения
Проверка цели, позволяющая определить, является ли данное

Пространство состояний для мира пылесоса
Пространство состояний для мира пылесоса
Мир пылесоса
Состояния. Агент находится в одном из двух местонахождений, в каждом
Мир пылесоса
Состояния. Агент находится в одном из двух местонахождений, в каждом

Задача игры в восемь
Задача игры в восемь имеет 9!/2 = 181
Задача игры в восемь
Задача игры в восемь имеет 9!/2 = 181

Поиск решений
Поиск решений

Представление узлов
State. Состояние в пространстве состояний, которому соответствует данный узел.
Parent-Node. Узел
Представление узлов
State. Состояние в пространстве состояний, которому соответствует данный узел.
Parent-Node. Узел
Представление узлов
Коллекция узлов, которые были сформированы, но еще не развернуты, называется
Представление узлов
Коллекция узлов, которые были сформированы, но еще не развернуты, называется
Измерение производительности решения задачи
Полнота. Гарантирует ли алгоритм обнаружение решения, если оно
Измерение производительности решения задачи
Полнота. Гарантирует ли алгоритм обнаружение решения, если оно

Стратегии неинформированного поиска
Uninformed search strategies use only the information available in
Стратегии неинформированного поиска
Uninformed search strategies use only the information available in

Uninformed search strategies
A search strategy is defined by picking the order
Uninformed search strategies
A search strategy is defined by picking the order

Breadth-first search
Expand shallowest unexpanded node
Frontier is a FIFO queue, i.e., new
Breadth-first search
Expand shallowest unexpanded node
Frontier is a FIFO queue, i.e., new

Breadth-first search
Expand shallowest unexpanded node
Frontier is a FIFO queue, i.e., new
Breadth-first search
Expand shallowest unexpanded node
Frontier is a FIFO queue, i.e., new

Breadth-first search
Expand shallowest unexpanded node
Frontier is a FIFO queue, i.e., new
Breadth-first search
Expand shallowest unexpanded node
Frontier is a FIFO queue, i.e., new

Breadth-first search
Expand shallowest unexpanded node
Frontier is a FIFO queue, i.e., new
Breadth-first search
Expand shallowest unexpanded node
Frontier is a FIFO queue, i.e., new
Breadth-first search
Breadth-first search
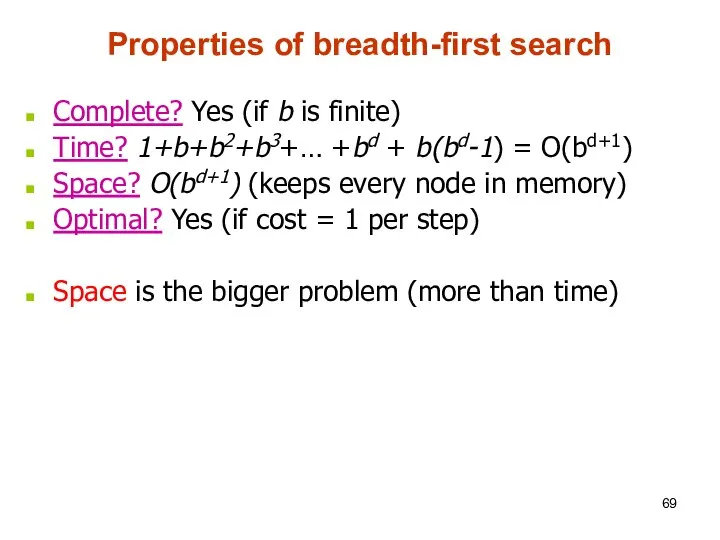
Properties of breadth-first search
Complete? Yes (if b is finite)
Time? 1+b+b2+b3+… +bd
Properties of breadth-first search
Complete? Yes (if b is finite)
Time? 1+b+b2+b3+… +bd
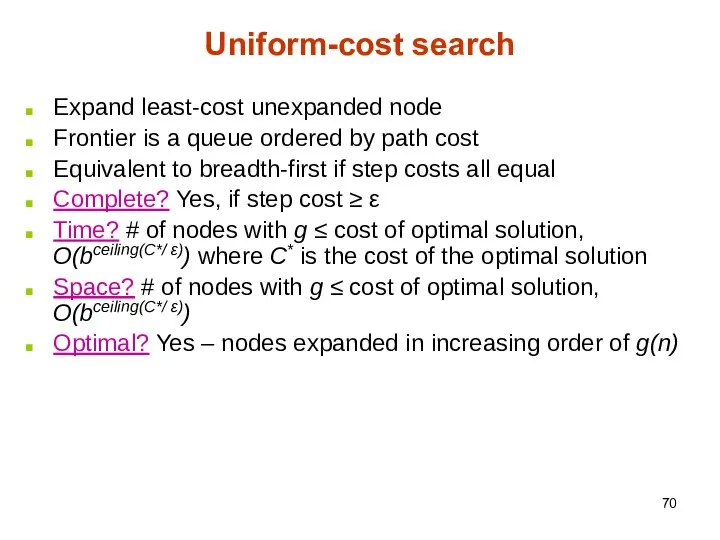
Uniform-cost search
Expand least-cost unexpanded node
Frontier is a queue ordered by path
Uniform-cost search
Expand least-cost unexpanded node
Frontier is a queue ordered by path

Depth-first search
Expand deepest unexpanded node. Frontier = LIFO queue, i.e., put
Depth-first search
Expand deepest unexpanded node. Frontier = LIFO queue, i.e., put
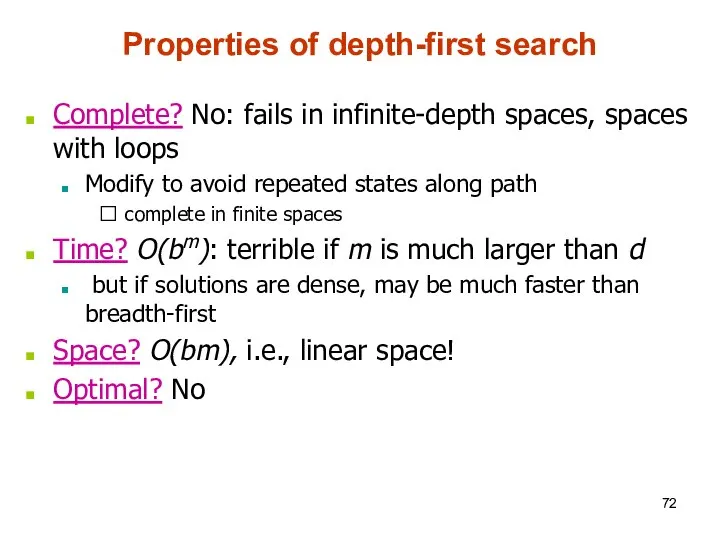
Properties of depth-first search
Complete? No: fails in infinite-depth spaces, spaces with
Properties of depth-first search
Complete? No: fails in infinite-depth spaces, spaces with

Depth-limited search
= depth-first search with depth limit l,
i.e., nodes at depth
Depth-limited search
= depth-first search with depth limit l,
i.e., nodes at depth

Iterative deepening search
Iterative deepening search

Iterative deepening search
Iterative deepening search

Iterative deepening search
Iterative deepening search

Iterative deepening search
Iterative deepening search

Iterative deepening search
Iterative deepening search

Properties of iterative deepening search
Complete? Yes
Time? (d+1)b0 + d b1 +
Properties of iterative deepening search
Complete? Yes
Time? (d+1)b0 + d b1 +

Comparing uninformed search strategies
Comparing uninformed search strategies

Стратегии информированного (эвристического) поиска
Помимо определения задачи используются знания, относящиеся к данной
Стратегии информированного (эвристического) поиска
Помимо определения задачи используются знания, относящиеся к данной
Жадный поиск по первому наилучшему совпадению
Предпринимаются попытки развертывания узла, который рассматривается
Жадный поиск по первому наилучшему совпадению
Предпринимаются попытки развертывания узла, который рассматривается

Пример. Выходные в Румынии
Пример. Выходные в Румынии

Этапы жадного поиска пути до Бухареста
Этапы жадного поиска пути до Бухареста

Этапы жадного поиска пути до Бухареста
Этапы жадного поиска пути до Бухареста

Этапы жадного поиска пути до Бухареста
Этапы жадного поиска пути до Бухареста

Этапы жадного поиска пути до Бухареста
Найденное решение не оптимально: путь до
Этапы жадного поиска пути до Бухареста
Найденное решение не оптимально: путь до

Свойства жадного поиска по наилучшему совпадению
Complete? No – can get stuck
Свойства жадного поиска по наилучшему совпадению
Complete? No – can get stuck

Поиск А*
f(n) = g(n) + h(n)
f(n) – оценка стоимости наименее
Поиск А*
f(n) = g(n) + h(n)
f(n) – оценка стоимости наименее
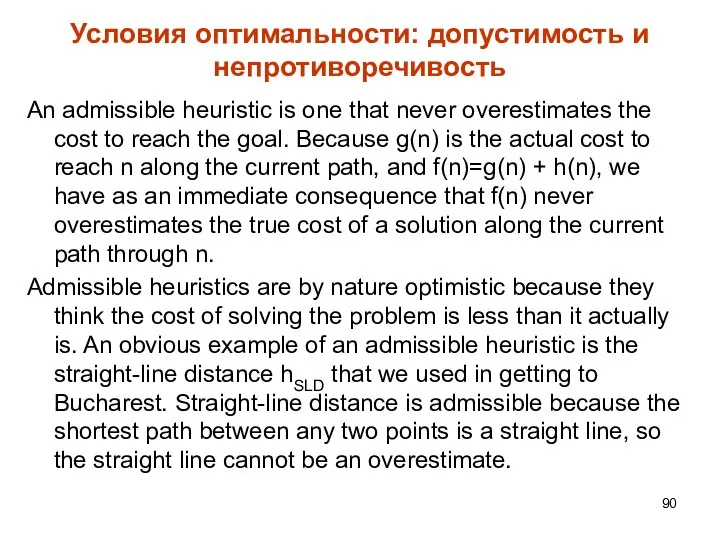
Условия оптимальности: допустимость и непротиворечивость
An admissible heuristic is one that never
Условия оптимальности: допустимость и непротиворечивость
An admissible heuristic is one that never

Поиск А*
Поиск А* является оптимальным, при условии, что h(n) представляет собой
Поиск А*
Поиск А* является оптимальным, при условии, что h(n) представляет собой
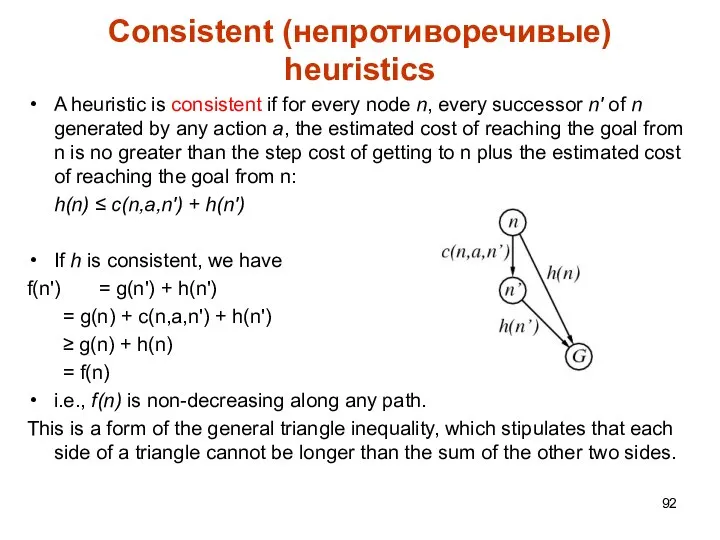
Consistent (непротиворечивые) heuristics
A heuristic is consistent if for every node n,
Consistent (непротиворечивые) heuristics
A heuristic is consistent if for every node n,

Optimality of A* (proof)
Suppose some suboptimal goal G2 has been generated
Optimality of A* (proof)
Suppose some suboptimal goal G2 has been generated

Optimality of A* (proof)
Suppose some suboptimal goal G2 has been generated
Optimality of A* (proof)
Suppose some suboptimal goal G2 has been generated

Поиск А*
Предположим, что на периферии поиска появился неоптимальный целевой узел G2,
Поиск А*
Предположим, что на периферии поиска появился неоптимальный целевой узел G2,

Поиск А*
Поиск А*

Поиск А*
Поиск А*

Поиск А*
Поиск А*
Поиск А*
Поиск А*

Поиск А*
Поиск А*
Поиск А*
Поиск А*

Properties of A*
Complete? Yes (unless there are infinitely many nodes with
Properties of A*
Complete? Yes (unless there are infinitely many nodes with

Поиск А*
Если С* представляет собой стоимость оптимального пути решения, то:
• в
Поиск А*
Если С* представляет собой стоимость оптимального пути решения, то:
• в

Эвристические функции
h1(n) = количество фишек, стоящих не на своем месте.
h2(n)
Эвристические функции
h1(n) = количество фишек, стоящих не на своем месте.
h2(n)

Эвристические функции
h1(n) = количество фишек, стоящих не на своем месте.
h2(n)
Эвристические функции
h1(n) = количество фишек, стоящих не на своем месте.
h2(n)

Сравнение алгоритмов поиска
Сравнение алгоритмов поиска

Доминирование
If h2(n) ≥ h1(n) for all n (both admissible)
then h2 dominates
Доминирование
If h2(n) ≥ h1(n) for all n (both admissible)
then h2 dominates
Поиск в условиях противодействия
(Игры)
Поиск в условиях противодействия
(Игры)
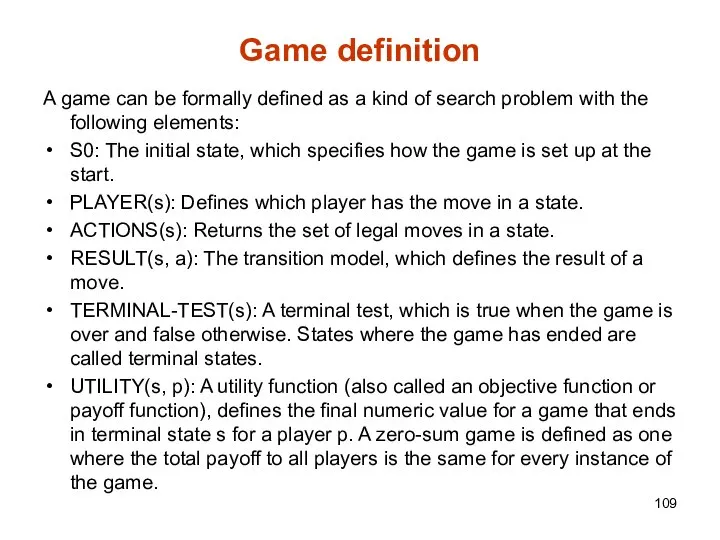
Game definition
A game can be formally defined as a kind of
Game definition
A game can be formally defined as a kind of
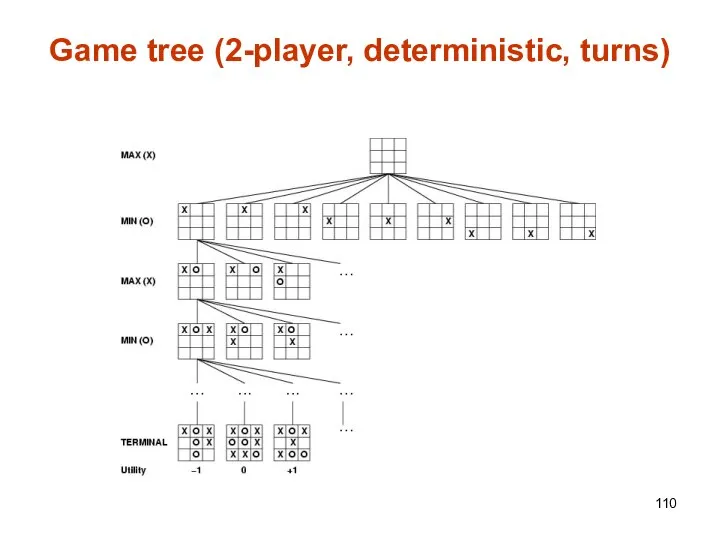
Game tree (2-player, deterministic, turns)
Game tree (2-player, deterministic, turns)
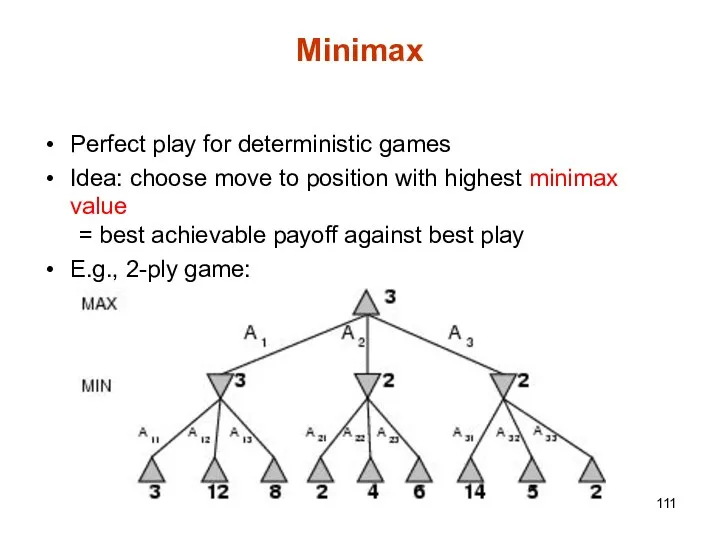
Minimax
Perfect play for deterministic games
Idea: choose move to position with highest
Minimax
Perfect play for deterministic games
Idea: choose move to position with highest

Minimax algorithm
Minimax algorithm

Optimal decisions in multiplayer games
Optimal decisions in multiplayer games
Properties of minimax
Complete? Yes (if tree is finite)
Optimal? Yes (against an
Properties of minimax
Complete? Yes (if tree is finite)
Optimal? Yes (against an
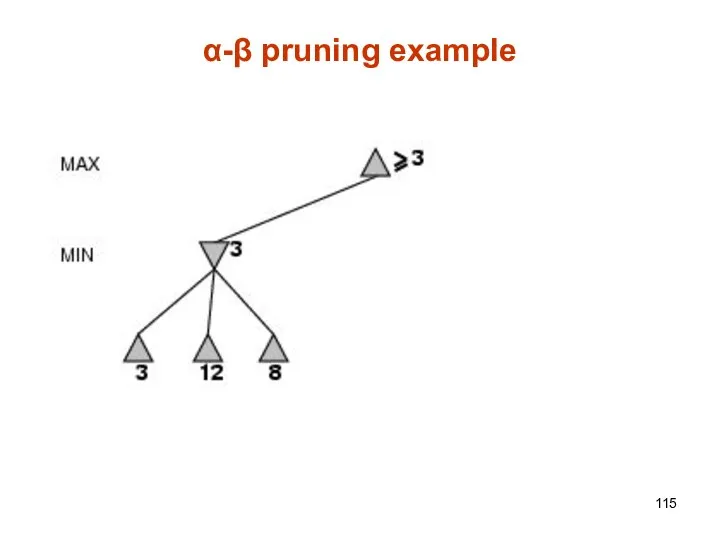
α-β pruning example
α-β pruning example

α-β pruning example
α-β pruning example

α-β pruning example
α-β pruning example

α-β pruning example
α-β pruning example

α-β pruning example
α-β pruning example

Properties of α-β
Pruning does not affect final result
Good move ordering improves
Properties of α-β
Pruning does not affect final result
Good move ordering improves

Why is it called α-β?
α is the value of the best
Why is it called α-β?
α is the value of the best
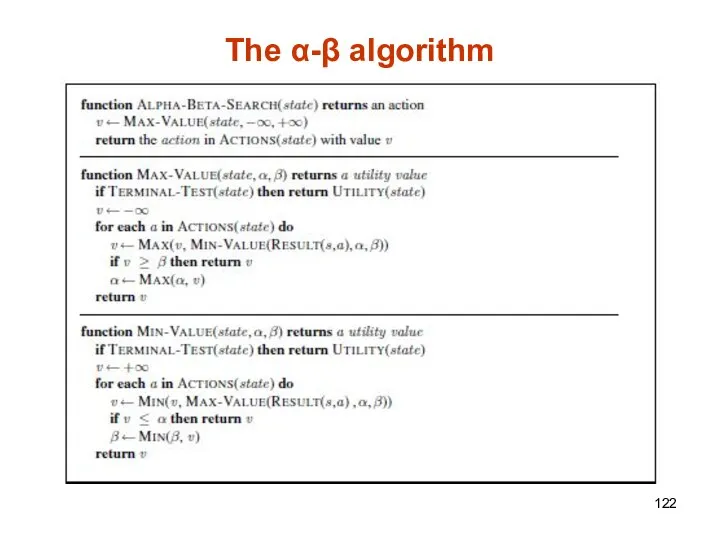
The α-β algorithm
The α-β algorithm
Evaluation functions
For chess, typically linear weighted sum of features
Eval(s) = w1
Evaluation functions
For chess, typically linear weighted sum of features
Eval(s) = w1

Планирование
Планирование

Основы планирования
Планированием называется процесс выработки последовательности действий, позволяющих достичь цели.
Среда называется
Основы планирования
Планированием называется процесс выработки последовательности действий, позволяющих достичь цели.
Среда называется
Задача планирования
Рассмотрим ситуацию, когда обычный агент, решающий задачи с помощью стандартных
Задача планирования
Рассмотрим ситуацию, когда обычный агент, решающий задачи с помощью стандартных

Задача планирования
Рассмотрим задачу покупки одного экземпляра англоязычного издания настоящей книги с
Задача планирования
Рассмотрим задачу покупки одного экземпляра англоязычного издания настоящей книги с

Задача планирования
Сложность 2.
Определение хорошей эвристической функции.
Пусть цель агента – купить
Задача планирования
Сложность 2.
Определение хорошей эвристической функции.
Пусть цель агента – купить

Задача планирования
Сложность 3.
Неспособность к декомпозиции задачи.
Например, задача доставки множества пакетов
Задача планирования
Сложность 3.
Неспособность к декомпозиции задачи.
Например, задача доставки множества пакетов

Планирование с помощью поиска в пространстве состояний
а) прямой (прогрессивный) поиск
б) обратный
Планирование с помощью поиска в пространстве состояний
а) прямой (прогрессивный) поиск
б) обратный

Прямой поиск в пространстве состояний
Формулировка задач планирования в виде задач поиска
Прямой поиск в пространстве состояний
Формулировка задач планирования в виде задач поиска
Обратный поиск в пространстве состояний
Основное преимущество – позволяет рассматривать только релевантные
Обратный поиск в пространстве состояний
Основное преимущество – позволяет рассматривать только релевантные
Обратный поиск в пространстве состояний
Поиск в обратном направлении называют регрессивным планированием.
Обратный поиск в пространстве состояний
Поиск в обратном направлении называют регрессивным планированием.

Обратный поиск в пространстве состояний
Формирование преемников для обратного поиска.
Допустим, что
Обратный поиск в пространстве состояний
Формирование преемников для обратного поиска.
Допустим, что

Планирование с частичным упорядочением
Недостаток прямого и обратного поиска в пространстве состояний
Планирование с частичным упорядочением
Недостаток прямого и обратного поиска в пространстве состояний

Пример задачи с надеванием пары туфель
Goal(RightShoeOn ^ LeftShoeOn)
Init()
Action(RightShoe, Precond: RightSockOn, Effect:
Пример задачи с надеванием пары туфель
Goal(RightShoeOn ^ LeftShoeOn)
Init()
Action(RightShoe, Precond: RightSockOn, Effect:
Планирование с частичным упорядочением
Любой алгоритм планирования, способный включить в план два
Планирование с частичным упорядочением
Любой алгоритм планирования, способный включить в план два

Линеаризация плана с частичным упорядочением
Решение с частичным упорядочением соответствует шести возможным
Линеаризация плана с частичным упорядочением
Решение с частичным упорядочением соответствует шести возможным
Планирование с частичным упорядочением
Планирование с частичным упорядочением может быть реализовано в
Планирование с частичным упорядочением
Планирование с частичным упорядочением может быть реализовано в

Компоненты плана
Множество действий, из которых состоят этапы плана. Эти действия берутся
Компоненты плана
Множество действий, из которых состоят этапы плана. Эти действия берутся

Компоненты плана
Множество причинных связей. Причинная связь между двумя действиями А и
Компоненты плана
Множество причинных связей. Причинная связь между двумя действиями А и

Пример задачи с надеванием пары туфель
Пример задачи с надеванием пары туфель
Согласованный план
Cогласованный план (consistent plan) – план, в котором не имеется
Согласованный план
Cогласованный план (consistent plan) – план, в котором не имеется

Формулировка задачи планирования
Начальный план содержит действия Start и Finish, ограничение упорядочения
Формулировка задачи планирования
Начальный план содержит действия Start и Finish, ограничение упорядочения
Формулировка задачи планирования
В ходе проверки цели осуществляется проверка того, является ли
Формулировка задачи планирования
В ходе проверки цели осуществляется проверка того, является ли

Пример планирования с частичным упорядочением
Пример задачи замены колеса со стертой покрышкой
Пример планирования с частичным упорядочением
Пример задачи замены колеса со стертой покрышкой

Пример планирования с частичным упорядочением
Поиск решения начинается с начального плана, содержащего
Пример планирования с частичным упорядочением
Поиск решения начинается с начального плана, содержащего

Пример планирования с частичным упорядочением
3. Взять предусловие ¬At (Flat, Axle) действия
Пример планирования с частичным упорядочением
3. Взять предусловие ¬At (Flat, Axle) действия

Пример планирования с частичным упорядочением
4. В этот момент единственным оставшимся открытым
Пример планирования с частичным упорядочением
4. В этот момент единственным оставшимся открытым
Пример планирования с частичным упорядочением
5. Еще раз рассмотрим предусловие ¬At(Flat,Axle) действия
Пример планирования с частичным упорядочением
5. Еще раз рассмотрим предусловие ¬At(Flat,Axle) действия
Планирование действий в пространстве задач
При решении сложных задач пользуются разбиением на
Планирование действий в пространстве задач
При решении сложных задач пользуются разбиением на

Планирование действий в пространстве задач
Пример Маккарти. Ханойские башни.
3 колышка (1
Планирование действий в пространстве задач
Пример Маккарти. Ханойские башни.
3 колышка (1

Планирование действий в пространстве задач
Заключительные вершины соответствуют элементарным задачам.
Планирование действий в пространстве задач
Заключительные вершины соответствуют элементарным задачам.

Применение ключевых операторов
Пусть (S, F, G) – описание исходной задачи в
Применение ключевых операторов
Пусть (S, F, G) – описание исходной задачи в

Задача об обезьяне и банане (I)
А - первоначальное нахождение обезьяны.
B
Задача об обезьяне и банане (I)
А - первоначальное нахождение обезьяны.
B

Задача об обезьяне и банане (2)
Решение.
Очевидно, F = {f1, f2, f3,
Задача об обезьяне и банане (2)
Решение.
Очевидно, F = {f1, f2, f3,

Задача об обезьяне и банане (3)
Конструируем правила переписывания:
Подойти(y1) f1(x1, 0, x3, x4)
Задача об обезьяне и банане (3)
Конструируем правила переписывания:
Подойти(y1) f1(x1, 0, x3, x4)
Задача об обезьяне и банане (4)
Шаг 1. Вычислить различия для исходной
Задача об обезьяне и банане (4)
Шаг 1. Вычислить различия для исходной

Планирование иерархической сети задач
Метод планирования HTN (Hierarchical Task Network) рассматривает первоначальный
Планирование иерархической сети задач
Метод планирования HTN (Hierarchical Task Network) рассматривает первоначальный

Планирование иерархической сети задач
Планирование иерархической сети задач

Мультиагентное планирование
Задача игры в парный теннис. Два агента играют в одной
Мультиагентное планирование
Задача игры в парный теннис. Два агента играют в одной

Мультиагентное планирование
Решением мультиагентной задачи планирования является совместный план (joint plan), состоящий
Мультиагентное планирование
Решением мультиагентной задачи планирования является совместный план (joint plan), состоящий

Мультиагентное планирование
Решение проблемы – координация
Мультиагентное планирование
Решение проблемы – координация
Механизмы кординации
Простейший метод, с помощью которого группа агентов может обеспечить координацию
Механизмы кординации
Простейший метод, с помощью которого группа агентов может обеспечить координацию

Механизмы кординации
Модель поведения птицеподобного агента (который иногда именуется орнитоидом или боидом
Механизмы кординации
Модель поведения птицеподобного агента (который иногда именуется орнитоидом или боидом
Механизмы кординации
При отсутствии применимого соглашения агенты могут использовать общение для получения
Механизмы кординации
При отсутствии применимого соглашения агенты могут использовать общение для получения

Многоагентная система – это система, в которой несколько взаимодействующих интеллектуальных агентов
Многоагентная система – это система, в которой несколько взаимодействующих интеллектуальных агентов

Свойства интеллектуального агента
Агенты — это активные объекты (программные модули), которые могут
Свойства интеллектуального агента
Агенты — это активные объекты (программные модули), которые могут

Принципы конструирования агента на основе спецификаций FIPA
FIPA (FOUNDATION FOR INTELLIGENT
Принципы конструирования агента на основе спецификаций FIPA
FIPA (FOUNDATION FOR INTELLIGENT

Пример взаимодействия агентов (1):
отдыхающим назначена одна и та же процедура
Входные
Пример взаимодействия агентов (1):
отдыхающим назначена одна и та же процедура
Входные

Пример взаимодействия агентов (2):
отдыхающим назначены разные процедуры
Входные данные:
Для отдыхающего № 1
Пример взаимодействия агентов (2):
отдыхающим назначены разные процедуры
Входные данные:
Для отдыхающего № 1

Пример взаимодействия агентов (3):
отдыхающим назначены две одинаковые процедуры
Входные данные: Для отдыхающих
Пример взаимодействия агентов (3):
отдыхающим назначены две одинаковые процедуры
Входные данные: Для отдыхающих
 Базовая станция Sonic Duo Название: OBI Химки
Базовая станция Sonic Duo Название: OBI Химки Пенсионные системы
Пенсионные системы  Жетекші: Аяпова Ж.О Жетекші: Аяпова Ж.О Орындаған: Айт-Базар Райхан Факультет: ЖМ Курс: ІІ Топ: 001-1 Алматы 2014 жыл
Жетекші: Аяпова Ж.О Жетекші: Аяпова Ж.О Орындаған: Айт-Базар Райхан Факультет: ЖМ Курс: ІІ Топ: 001-1 Алматы 2014 жыл ЛАСКАВО ПРОСИМО до Красного Кута
ЛАСКАВО ПРОСИМО до Красного Кута Презентация на тему "Делинквентное поведение" - скачать презентации по Педагогике
Презентация на тему "Делинквентное поведение" - скачать презентации по Педагогике КОВАЛЕВСКАЯ Софья Васильевна (1850-1891)
КОВАЛЕВСКАЯ Софья Васильевна (1850-1891)  Предпринимательская экосистема Пермь 2010
Предпринимательская экосистема Пермь 2010 Сортировка пушно-меховых и овчинно-шубных товаров Лекция
Сортировка пушно-меховых и овчинно-шубных товаров Лекция  Алгоритмизация и программирование
Алгоритмизация и программирование Управление компетенциями Управление компетенциями metaver.ru В корпорациях и вне. - презентация
Управление компетенциями Управление компетенциями metaver.ru В корпорациях и вне. - презентация Трансактный анализ Э.Берна
Трансактный анализ Э.Берна  Проект поселка на 2000 жителей. Карта горизонталей
Проект поселка на 2000 жителей. Карта горизонталей past perfect progressive Подготовила: Студентка группы Ю092 Виноградская Екатерина
past perfect progressive Подготовила: Студентка группы Ю092 Виноградская Екатерина «КИТАЙСКИЕ иероглифы» подготовила ученица 9 «А» класса Кутынцева Елена Презентация по теме:
«КИТАЙСКИЕ иероглифы» подготовила ученица 9 «А» класса Кутынцева Елена Презентация по теме: Метод прямого выбора SelectSort
Метод прямого выбора SelectSort Презентация "Новый год. История праздника" - скачать презентации по МХК
Презентация "Новый год. История праздника" - скачать презентации по МХК Музы древней Греции
Музы древней Греции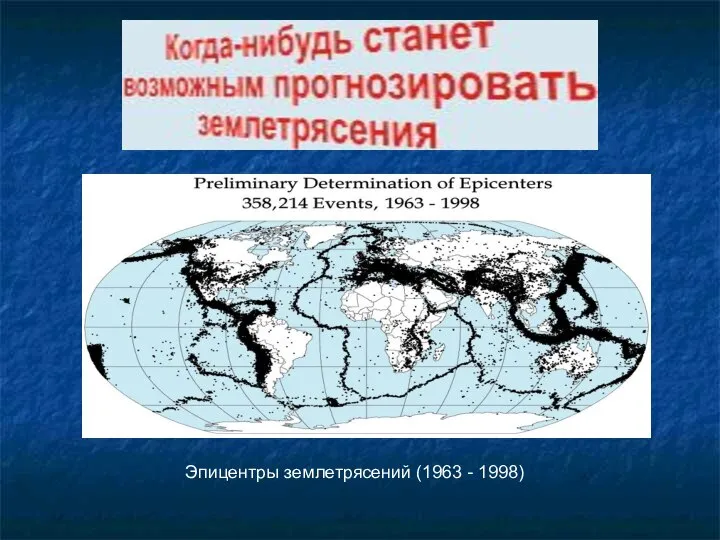 Землетрясения
Землетрясения  Атрофия. Гипертрофия. гиперплазия. Метаплазия. Дисплазия
Атрофия. Гипертрофия. гиперплазия. Метаплазия. Дисплазия Гипотермия
Гипотермия  Искусственный интеллект
Искусственный интеллект ЦЕНТРАЛЬНЫЙ БАНК И ОСНОВЫ ЕГО ДЕЯТЕЛЬНОСТИ
ЦЕНТРАЛЬНЫЙ БАНК И ОСНОВЫ ЕГО ДЕЯТЕЛЬНОСТИ  Методы исследования аминокислот и белков
Методы исследования аминокислот и белков Готов к труду и обороне (ГТО)
Готов к труду и обороне (ГТО) Массивы
Массивы Внешний Долг РФ как угроза Экономической Безопасности Выполнила:Мещерякова Юлия (Т-095)
Внешний Долг РФ как угроза Экономической Безопасности Выполнила:Мещерякова Юлия (Т-095) Социальные группы как субъект политики: психологический аспект
Социальные группы как субъект политики: психологический аспект Сказочный цветок Выполнила: Дажинова В.Ю. Место работы: МОУ «Мухтоловская средняя общеобразовательная школа №2»
Сказочный цветок Выполнила: Дажинова В.Ю. Место работы: МОУ «Мухтоловская средняя общеобразовательная школа №2»