- Средства наблюдения

Содержание
- 2. Федеральные авиационные правила «Радиотехническое обеспечение полетов воздушных судов и авиацион-ная электросвязь в гражданской авиации» утв. Приказом
- 3. АРП предназначен для выдачи информации о пеленге на воздушное судно относительно места установки антенны радиопеленгатора по
- 4. Требования к характеристикам АРП
- 5. Автономный радиопеленгатор (АРП)
- 6. Требования к размещению АРП 1) На аэродромах, не оборудованных радиомаячной системой инструментального захода ВС на посадку
- 7. Обзорные радиолокаторы По принципу действия радиолокаторы делятся на первичные (ПРЛ) и вторичные (ВРЛ). Применяемые ПРЛ: 1РЛ139,
- 8. Первичный радиолокатор ПРЛ предназначен для обнаружения ВС и определения их координат (азимут, наклонная дальность). Азимутальный канал
- 9. Первичный радиолокатор 1Л118
- 10. Антенны ПРЛ Примеры ПРЛ: 1РЛ139, 1Л118 (Лира-1).
- 11. ДНА первичного канала РЛК «Сопка-2» __________ Режим АМ1; __________ Режим КГ2; __________ Режим АМ2
- 12. Режимы РЛК «Сопка-2» Режимы АМ1 и АМ2 предназначены для работы ТРЛК в амплитудном режиме без СДЦ.
- 13. Вторичный радиолокатор ВРЛ предназначен для обнаружения ВС, определения их координат (азимут, наклонная дальность) и получения дополнительной
- 14. Во вторичной радиолокации применяют два вида кодов: УВД и RBS. Запросный сигнал кода УВД излучается на
- 15. Сигнал запроса УВД излучается запросчиком на частоте 837.5 МГц. Он содержит импульсы (обозначаемых как Р1 и
- 16. В режиме УВД ответный сигнал излучается на частоте 740 МГц и состоит из трех частей. Первая
- 17. В режиме RBS ответный сигнал излучается на частоте 1090 МГц. Ответные коды содержат два опорных импульса
- 18. Формат адресного запроса и ответа на адресный запрос
- 19. Структура сообщения 1090ES Сигнал излучается состоит из 112 информационных бит, длительность всего сообщения - 120 микросекунд.
- 20. Радиолокационные комплексы (РЛК)
- 21. Трассовый радиолокационный комплекс «Лира-Т»
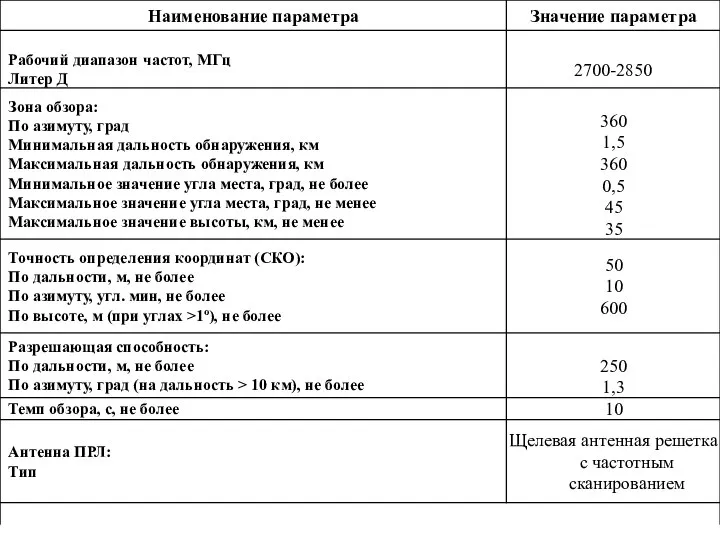
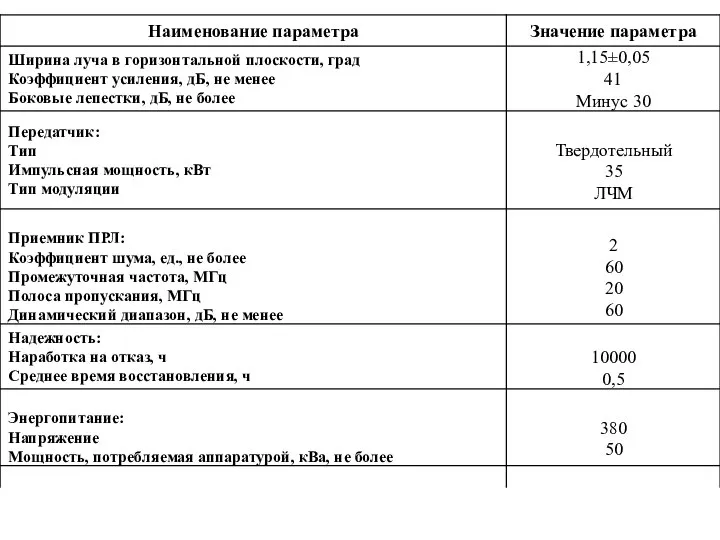
- 22. ТРЛК “СОПКА - 2”.
- 25. Ам1, Ам2, Кг2 Зона обнаружения ПОРЛ по цели с ЭПР=10 м2, Робн=0,8
- 26. Аэродромные радиолокационные комплексы «Лира-А10» «Иртыш-СКУ» «АОРЛ-85»
- 27. ОРЛ-Т предназначен для обнаружения и определения координат (азимут-дальность) воздушных судов во внеаэродромной зоне (на воздушных трассах
- 28. ОРЛ-А предназначен для обнаружения и определения координат (азимут-дальность) воздушных судов в районе аэродрома с последующей передачей
- 29. Основные характеристики современных ОРЛ-А
- 30. Радиопрозрачный купол
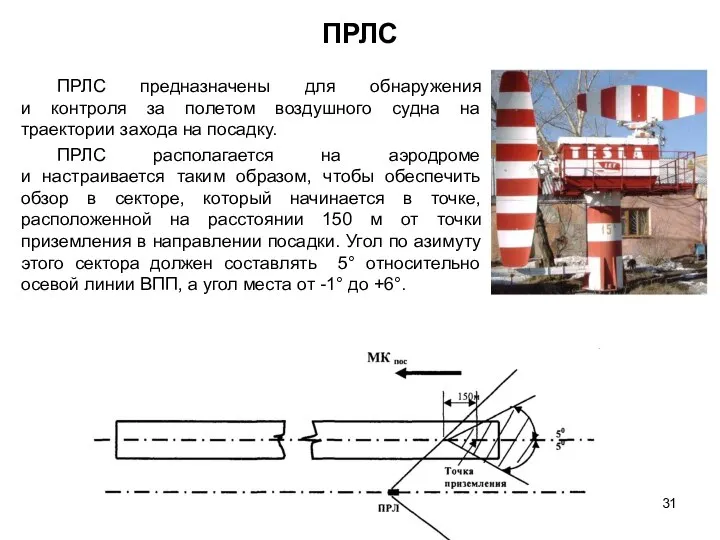
- 31. ПРЛС ПРЛС предназначены для обнаружения и контроля за полетом воздушного судна на траектории захода на посадку.
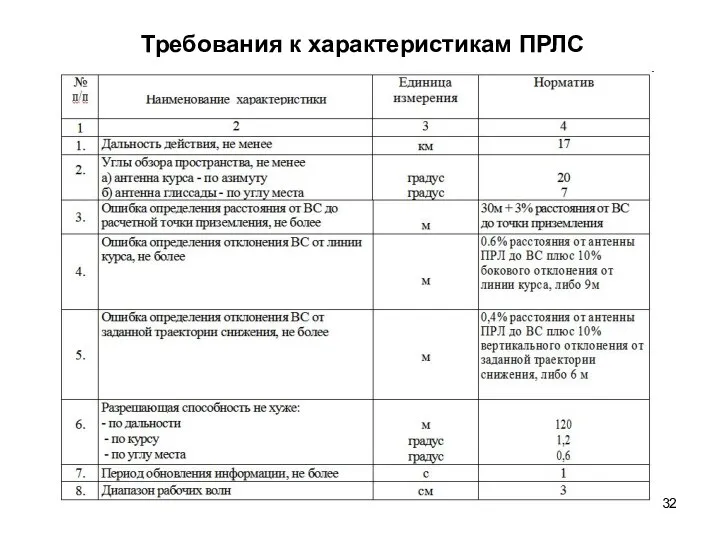
- 32. Требования к характеристикам ПРЛС
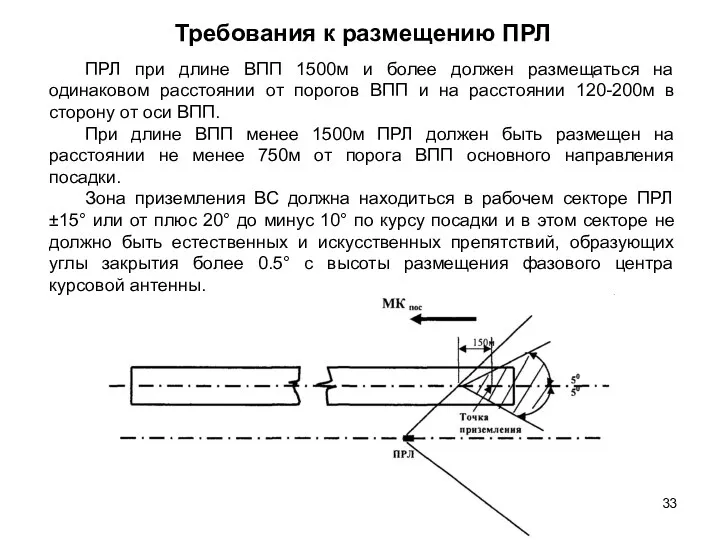
- 33. Требования к размещению ПРЛ ПРЛ при длине ВПП 1500м и более должен размещаться на одинаковом расстоянии
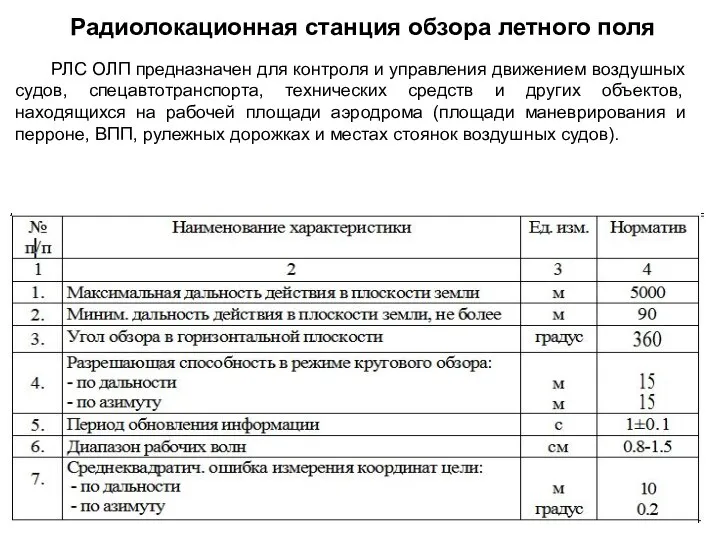
- 34. Радиолокационная станция обзора летного поля РЛС ОЛП предназначен для контроля и управления движением воздушных судов, спецавтотранспорта,
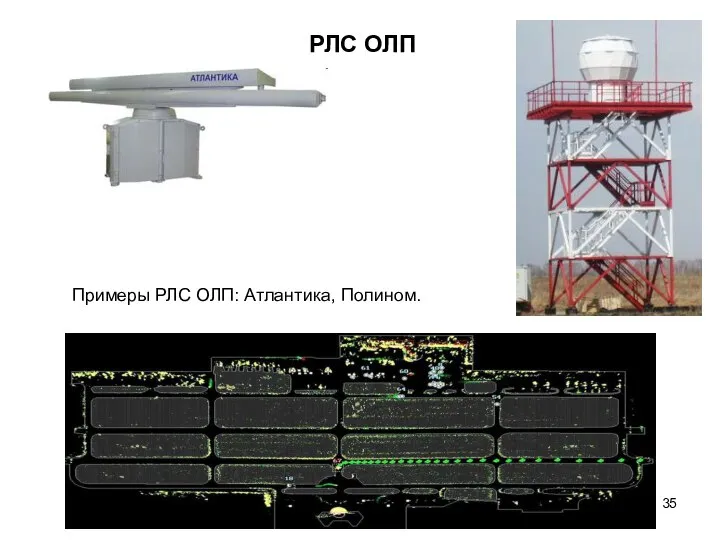
- 35. РЛС ОЛП Примеры РЛС ОЛП: Атлантика, Полином.
- 36. МПСН-А МПСН-А предназначена для определения местоположения и управления движением воздушных судов, спецавтотранспорта, технических средств и других
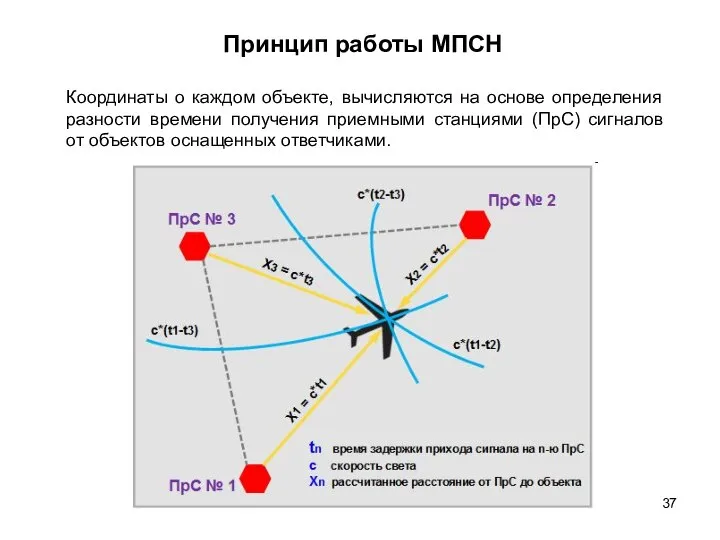
- 37. Принцип работы МПСН Координаты о каждом объекте, вычисляются на основе определения разности времени получения приемными станциями
- 38. МПСН-Ш предназначена для определения местоположения и управления движением воздушных судов, оборудованных бортовыми ответчиками, работающими в международном
- 39. Многопозиционная система наблюдения была впервые применена в целях обслуживания гражданских ВС в Остраве, третьем по загруженности
- 40. Автоматическое зависимое наблюдение Автоматическое зависимое наблюдение (АЗН или ADS – Automatic Dependent Surveillance) – это концепция,
- 41. АЗН-К АЗН-К предназначено для наблюдения за воздушными судами при приеме информации с борта воздушного судна, имеющего
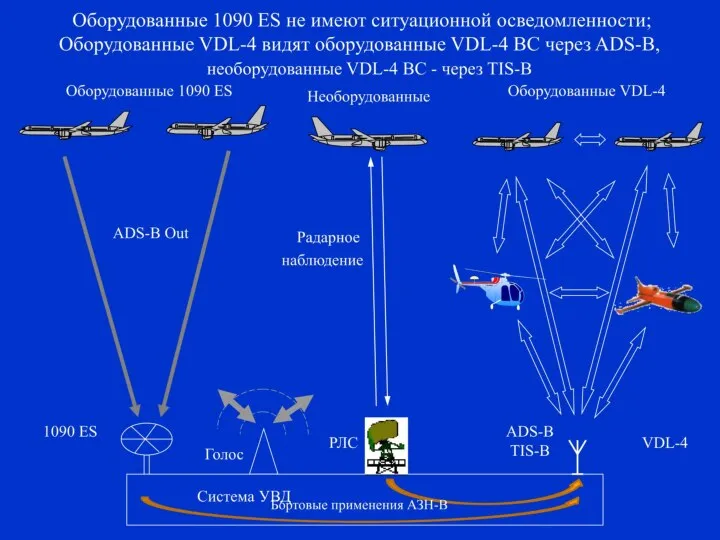
- 42. АЗН-В АЗН-В предназначена для наблюдения за воздушными судами при приеме информации с борта воздушного судна о
- 45. ADS-B включает в себя четыре сервиса: 1. ADS-B Непосредственно система АЗН-В. 2. ADS-R (Automatic Dependant Surveillance
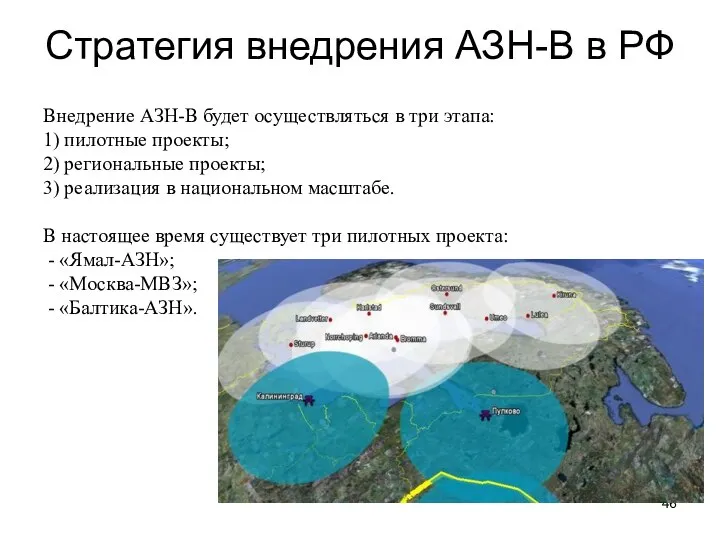
- 46. Стратегия внедрения АЗН-В в РФ Внедрение АЗН-В будет осуществляться в три этапа: 1) пилотные проекты; 2)
- 49. Оборудование видеонаблюдения предназначено для наблюдения с помощью телевизионных, тепловизорных и других визуальных средств за воздушными судами,
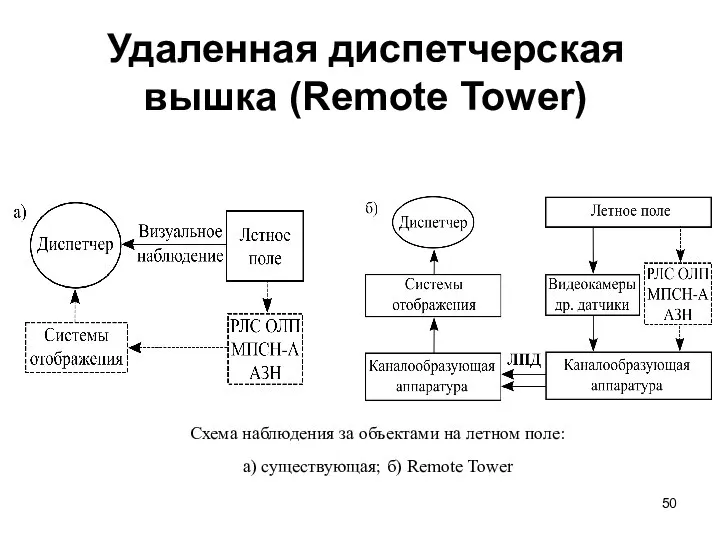
- 50. Удаленная диспетчерская вышка (Remote Tower) Схема наблюдения за объектами на летном поле: а) существующая; б) Remote
- 53. Скачать презентацию
Федеральные авиационные правила «Радиотехническое обеспечение полетов воздушных судов и авиацион-ная электросвязь
Федеральные авиационные правила «Радиотехническое обеспечение полетов воздушных судов и авиацион-ная электросвязь

АРП предназначен для выдачи информации о пеленге
на воздушное судно относительно
АРП предназначен для выдачи информации о пеленге на воздушное судно относительно
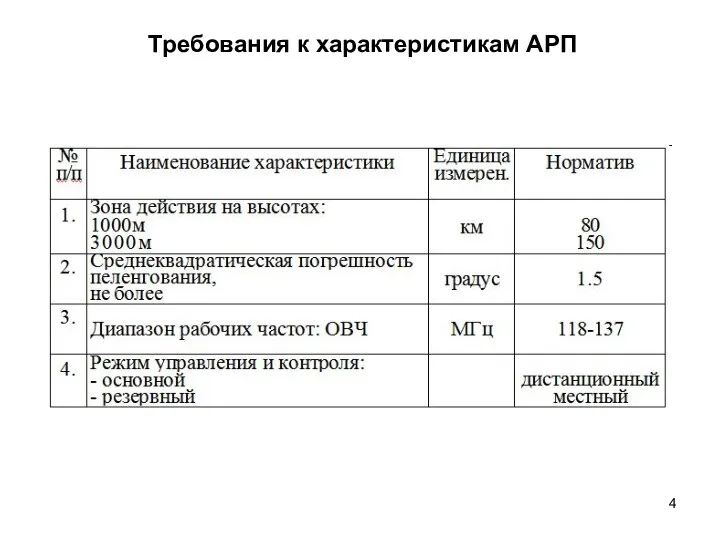
Требования к характеристикам АРП
Требования к характеристикам АРП
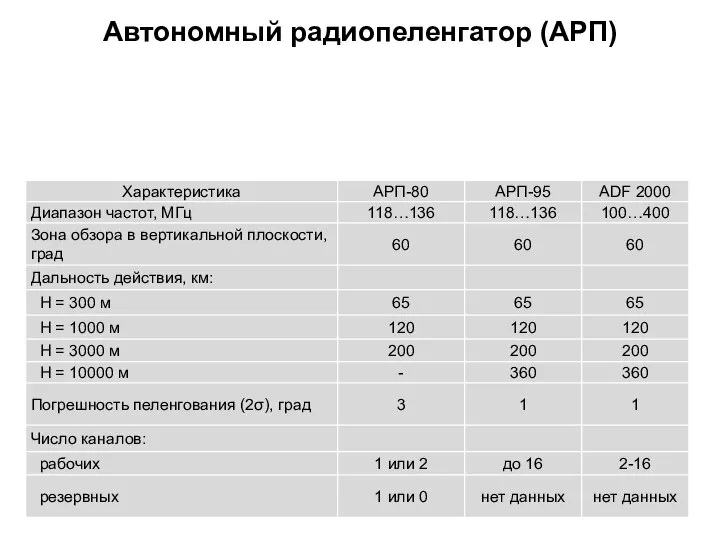
Автономный радиопеленгатор (АРП)
Автономный радиопеленгатор (АРП)
Требования к размещению АРП
1) На аэродромах, не оборудованных радиомаячной системой инструментального
Требования к размещению АРП
1) На аэродромах, не оборудованных радиомаячной системой инструментального
Обзорные радиолокаторы
По принципу действия радиолокаторы делятся
на первичные (ПРЛ) и вторичные
Обзорные радиолокаторы
По принципу действия радиолокаторы делятся на первичные (ПРЛ) и вторичные
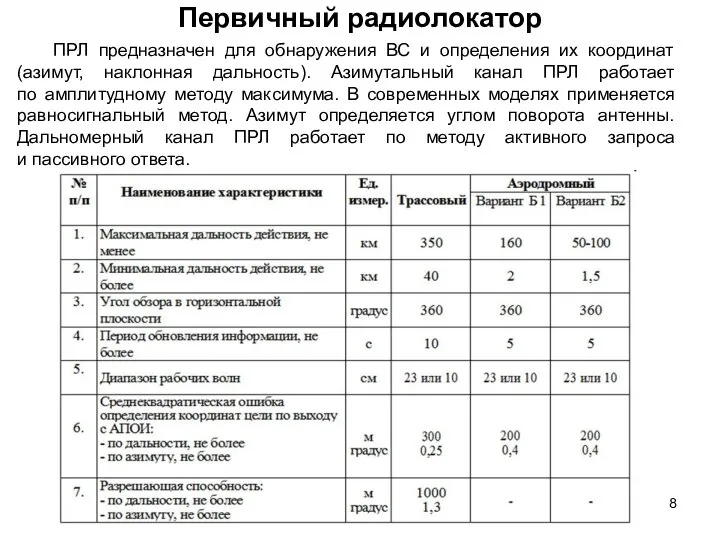
Первичный радиолокатор
ПРЛ предназначен для обнаружения ВС и определения их координат (азимут,
Первичный радиолокатор
ПРЛ предназначен для обнаружения ВС и определения их координат (азимут,

Первичный радиолокатор 1Л118
Первичный радиолокатор 1Л118

Антенны ПРЛ
Примеры ПРЛ: 1РЛ139, 1Л118 (Лира-1).
Антенны ПРЛ
Примеры ПРЛ: 1РЛ139, 1Л118 (Лира-1).
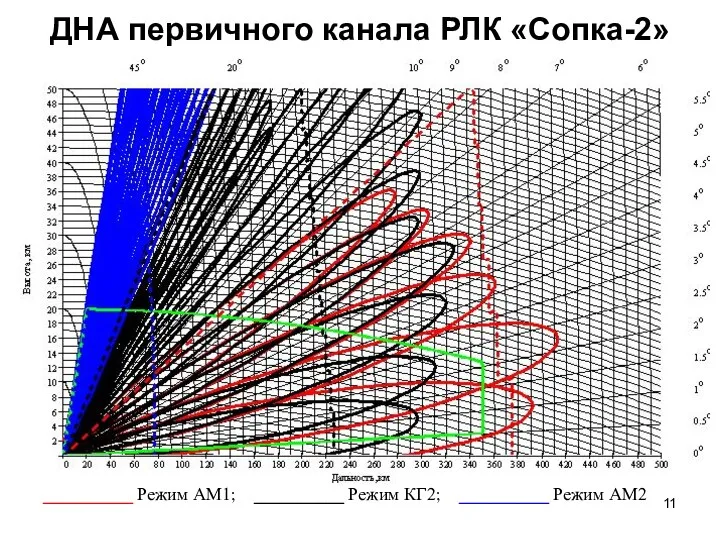
ДНА первичного канала РЛК «Сопка-2»
__________ Режим АМ1; __________ Режим КГ2; __________
ДНА первичного канала РЛК «Сопка-2»
__________ Режим АМ1; __________ Режим КГ2; __________
Режимы РЛК «Сопка-2»
Режимы АМ1 и АМ2 предназначены для работы ТРЛК в
Режимы РЛК «Сопка-2»
Режимы АМ1 и АМ2 предназначены для работы ТРЛК в
Вторичный радиолокатор
ВРЛ предназначен для обнаружения ВС, определения их координат (азимут,
Вторичный радиолокатор
ВРЛ предназначен для обнаружения ВС, определения их координат (азимут,
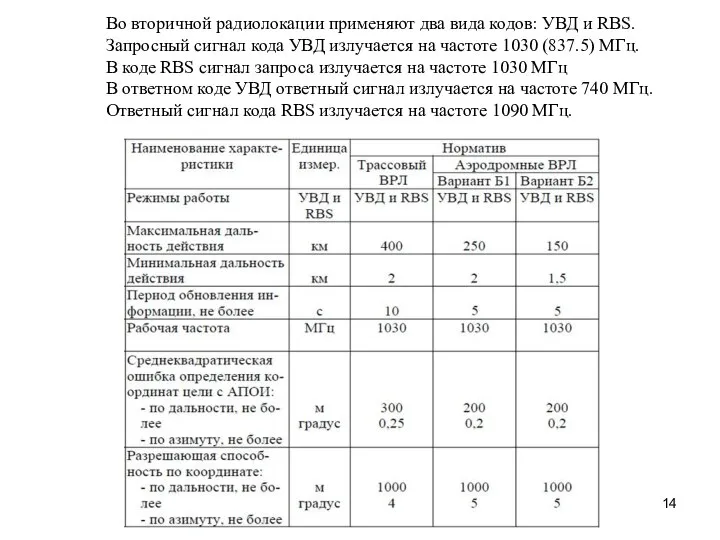
Во вторичной радиолокации применяют два вида кодов: УВД и RBS.
Запросный сигнал
Во вторичной радиолокации применяют два вида кодов: УВД и RBS.
Запросный сигнал
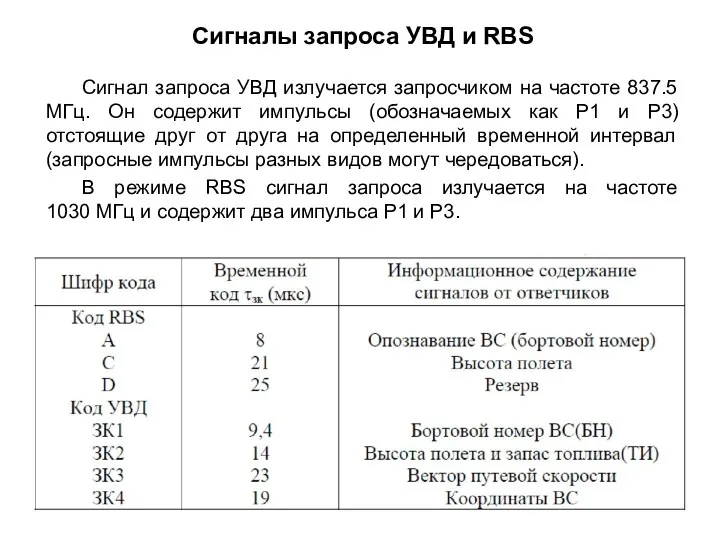
Сигнал запроса УВД излучается запросчиком на частоте 837.5 МГц. Он содержит
Сигнал запроса УВД излучается запросчиком на частоте 837.5 МГц. Он содержит
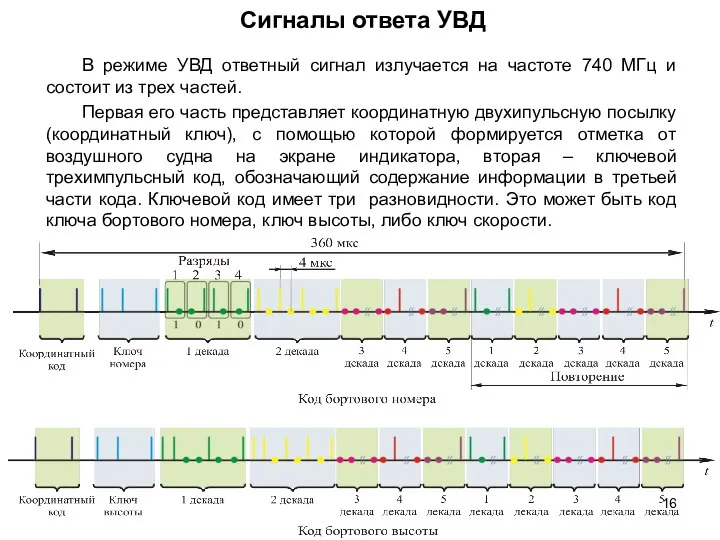
В режиме УВД ответный сигнал излучается на частоте 740 МГц и
В режиме УВД ответный сигнал излучается на частоте 740 МГц и
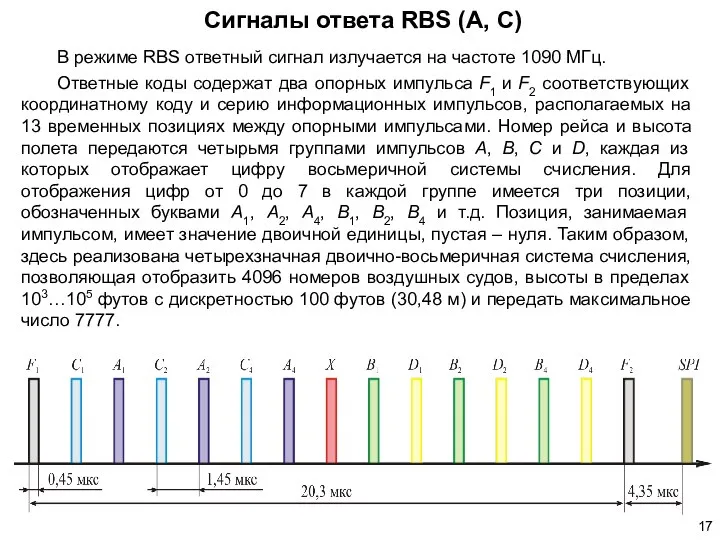
В режиме RBS ответный сигнал излучается на частоте 1090 МГц.
Ответные коды
В режиме RBS ответный сигнал излучается на частоте 1090 МГц.
Ответные коды
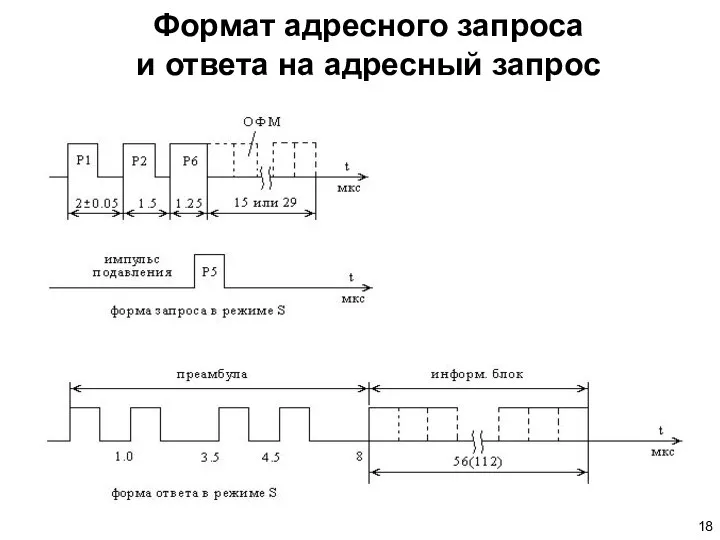
Формат адресного запроса
и ответа на адресный запрос
Формат адресного запроса
и ответа на адресный запрос
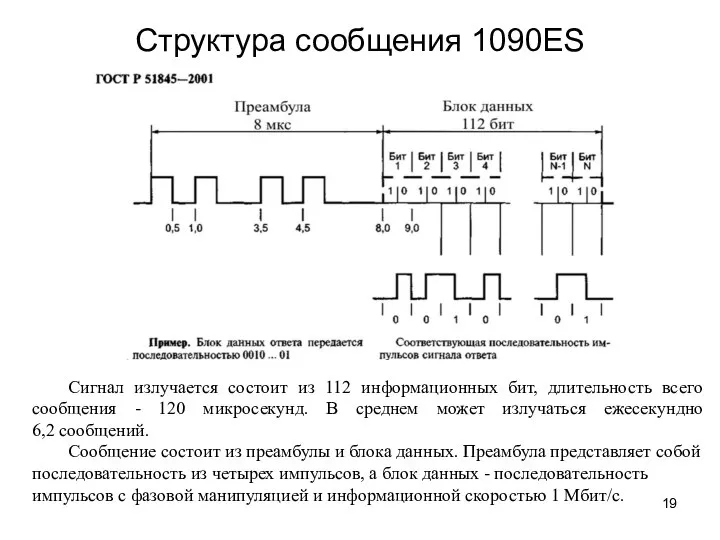
Структура сообщения 1090ES
Сигнал излучается состоит из 112 информационных бит, длительность
Структура сообщения 1090ES
Сигнал излучается состоит из 112 информационных бит, длительность
Радиолокационные комплексы (РЛК)
Радиолокационные комплексы (РЛК)

Трассовый радиолокационный комплекс «Лира-Т»
Трассовый радиолокационный комплекс «Лира-Т»
ТРЛК “СОПКА - 2”.
ТРЛК “СОПКА - 2”.
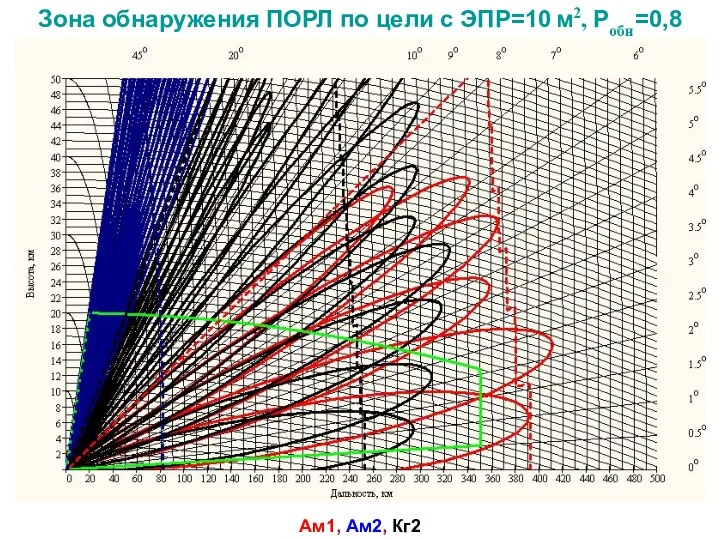
Ам1, Ам2, Кг2
Зона обнаружения ПОРЛ по цели с ЭПР=10 м2, Робн=0,8
Ам1, Ам2, Кг2
Зона обнаружения ПОРЛ по цели с ЭПР=10 м2, Робн=0,8

Аэродромные радиолокационные комплексы
«Лира-А10»
«Иртыш-СКУ»
«АОРЛ-85»
Аэродромные радиолокационные комплексы
«Лира-А10»
«Иртыш-СКУ»
«АОРЛ-85»
ОРЛ-Т предназначен для обнаружения и определения координат (азимут-дальность) воздушных судов
во
ОРЛ-Т предназначен для обнаружения и определения координат (азимут-дальность) воздушных судов во
ОРЛ-А предназначен для обнаружения и определения координат (азимут-дальность) воздушных судов в
ОРЛ-А предназначен для обнаружения и определения координат (азимут-дальность) воздушных судов в

Основные характеристики современных ОРЛ-А
Основные характеристики современных ОРЛ-А

Радиопрозрачный купол
Радиопрозрачный купол
ПРЛС
ПРЛС предназначены для обнаружения
и контроля за полетом воздушного судна на
ПРЛС
ПРЛС предназначены для обнаружения и контроля за полетом воздушного судна на
Требования к характеристикам ПРЛС
Требования к характеристикам ПРЛС
Требования к размещению ПРЛ
ПРЛ при длине ВПП 1500м и более должен
Требования к размещению ПРЛ
ПРЛ при длине ВПП 1500м и более должен
Радиолокационная станция обзора летного поля
РЛС ОЛП предназначен для контроля и управления
Радиолокационная станция обзора летного поля
РЛС ОЛП предназначен для контроля и управления
РЛС ОЛП
Примеры РЛС ОЛП: Атлантика, Полином.
РЛС ОЛП
Примеры РЛС ОЛП: Атлантика, Полином.

МПСН-А
МПСН-А предназначена для определения местоположения
и управления движением воздушных судов, спецавтотранспорта,
МПСН-А
МПСН-А предназначена для определения местоположения и управления движением воздушных судов, спецавтотранспорта,
Принцип работы МПСН
Координаты о каждом объекте, вычисляются на основе определения разности
Принцип работы МПСН
Координаты о каждом объекте, вычисляются на основе определения разности
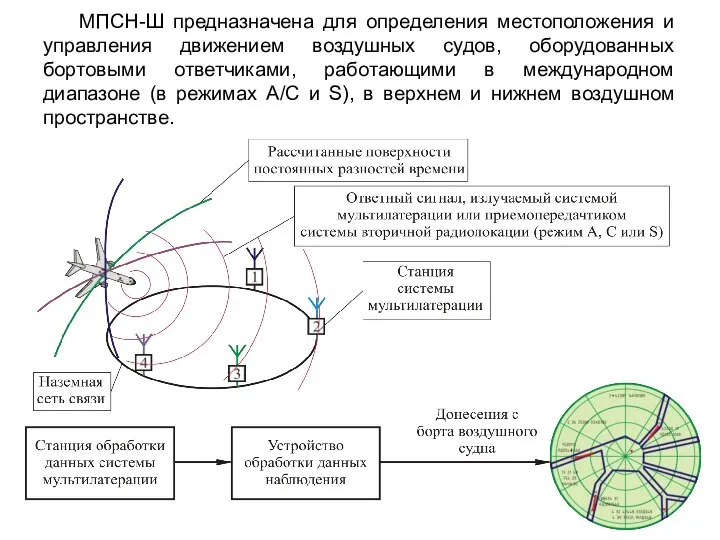
МПСН-Ш предназначена для определения местоположения и управления движением воздушных судов, оборудованных
МПСН-Ш предназначена для определения местоположения и управления движением воздушных судов, оборудованных
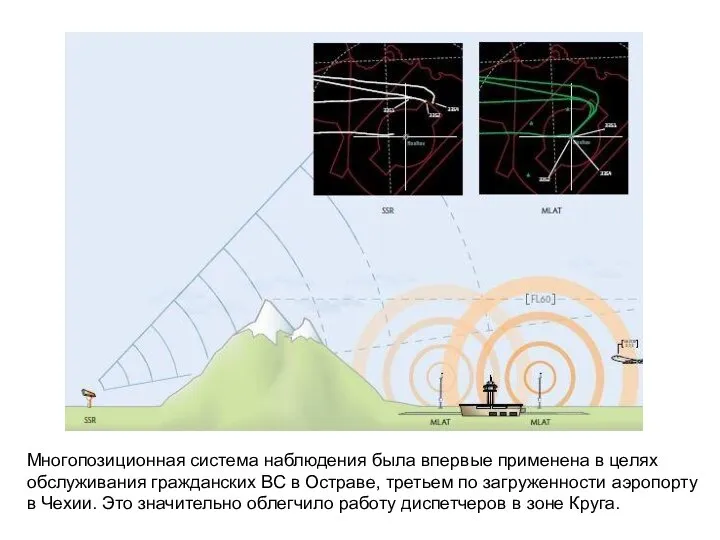
Многопозиционная система наблюдения была впервые применена в целях обслуживания гражданских ВС
Многопозиционная система наблюдения была впервые применена в целях обслуживания гражданских ВС
Автоматическое зависимое наблюдение
Автоматическое зависимое наблюдение (АЗН или ADS – Automatic Dependent
Автоматическое зависимое наблюдение
Автоматическое зависимое наблюдение (АЗН или ADS – Automatic Dependent
АЗН-К
АЗН-К предназначено для наблюдения за воздушными судами
при приеме информации с
АЗН-К
АЗН-К предназначено для наблюдения за воздушными судами при приеме информации с
АЗН-В
АЗН-В предназначена для наблюдения за воздушными судами
при приеме информации с
АЗН-В
АЗН-В предназначена для наблюдения за воздушными судами при приеме информации с
ADS-B включает в себя четыре сервиса:
1. ADS-B Непосредственно система АЗН-В.
ADS-B включает в себя четыре сервиса:
1. ADS-B Непосредственно система АЗН-В.
Стратегия внедрения АЗН-В в РФ
Внедрение АЗН-В будет осуществляться в три
Стратегия внедрения АЗН-В в РФ
Внедрение АЗН-В будет осуществляться в три


Оборудование видеонаблюдения предназначено
для наблюдения с помощью телевизионных, тепловизорных и других
Оборудование видеонаблюдения предназначено для наблюдения с помощью телевизионных, тепловизорных и других
Удаленная диспетчерская вышка (Remote Tower)
Схема наблюдения за объектами на летном поле:
а)
Удаленная диспетчерская вышка (Remote Tower)
Схема наблюдения за объектами на летном поле:
а)

 Малинина Алена Викторовна Учитель черчения и изобразительного искусства МОУ « СОШ № 12» город Усолье-Сибирс
Малинина Алена Викторовна Учитель черчения и изобразительного искусства МОУ « СОШ № 12» город Усолье-Сибирс Прием документации и зачисление в организации образования
Прием документации и зачисление в организации образования Ваш праздник
Ваш праздник Компьютерные сети
Компьютерные сети Культура Древней Индии
Культура Древней Индии Учитель английского языка Евсюкова И.А. МОУ «Федчёвская ООШ» 2009 год
Учитель английского языка Евсюкова И.А. МОУ «Федчёвская ООШ» 2009 год Цифровая телекоммуникационная система
Цифровая телекоммуникационная система Понятие гражданского права, как отрасли права. Источники гражданского права
Понятие гражданского права, как отрасли права. Источники гражданского права Передача информации. Локальные компьютерные сети
Передача информации. Локальные компьютерные сети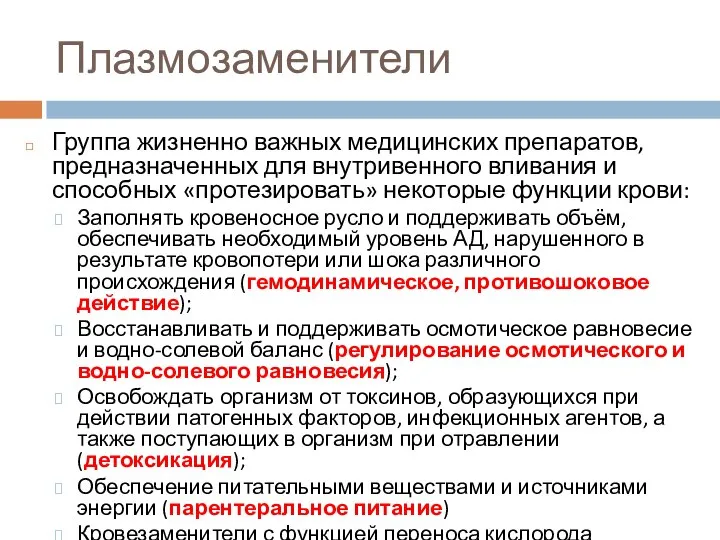 Плазмозаменители
Плазмозаменители Амнистия. Помилование.Судимость.
Амнистия. Помилование.Судимость. Классы
Классы  Вода и водные устройства
Вода и водные устройства Проект по продвижению комплекса ГТО
Проект по продвижению комплекса ГТО Презентация на тему "Образовательные программы" - скачать презентации по Педагогике
Презентация на тему "Образовательные программы" - скачать презентации по Педагогике Сервисы в Android
Сервисы в Android Элементарные функции
Элементарные функции Компьютерные вирусы
Компьютерные вирусы «МЫ ВЫБИРАЕМ ЗДОРОВЬЕ!!!» «Скажи наркотикам НЕТ !!!» Один мыслитель гулял со своими учениками в саду и отвечал на их вопросы. Потом к
«МЫ ВЫБИРАЕМ ЗДОРОВЬЕ!!!» «Скажи наркотикам НЕТ !!!» Один мыслитель гулял со своими учениками в саду и отвечал на их вопросы. Потом к  XXIII Зимние Олимпийские игры
XXIII Зимние Олимпийские игры Модель методической работы школы на 2011-2012 гг. Цели: активизировать методическую работу школы способствовать повышению професс
Модель методической работы школы на 2011-2012 гг. Цели: активизировать методическую работу школы способствовать повышению професс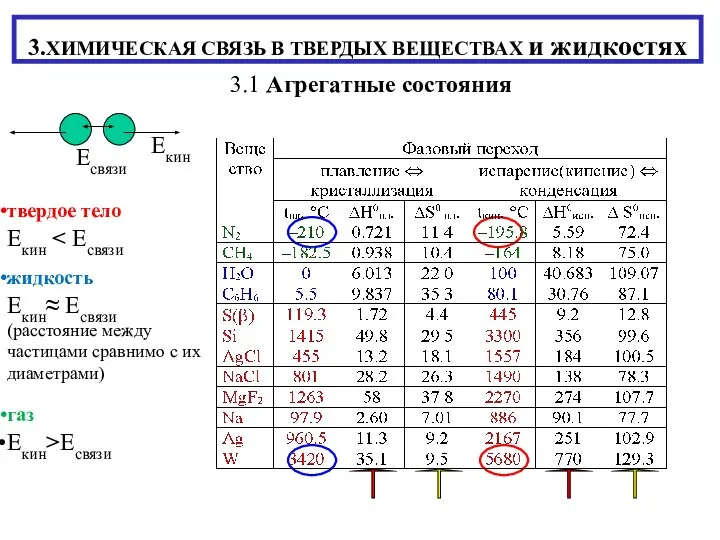 ХИМИЧЕСКАЯ СВЯЗЬ В ТВЕРДЫХ ВЕЩЕСТВАХ и жидкостях
ХИМИЧЕСКАЯ СВЯЗЬ В ТВЕРДЫХ ВЕЩЕСТВАХ и жидкостях Содержание и ремонт цементобетонных покрытий
Содержание и ремонт цементобетонных покрытий Презентация_____
Презентация_____ Разгледайте изразите. В какъв ред ще се извършват действията? Пресметнете ги. 516 – 7. 9 = 115 + 65 : 5 = 1 205. 78 – 96 : 2 = 2 015. 2 – 3 348 : 31 = - презента
Разгледайте изразите. В какъв ред ще се извършват действията? Пресметнете ги. 516 – 7. 9 = 115 + 65 : 5 = 1 205. 78 – 96 : 2 = 2 015. 2 – 3 348 : 31 = - презента Конституционное право РФ
Конституционное право РФ Укажите, в каком случае слово употреблено в прямом значении, а в каком – в переносном. Подберите и запишите синонимы к данным слова
Укажите, в каком случае слово употреблено в прямом значении, а в каком – в переносном. Подберите и запишите синонимы к данным слова Презентация на тему "Управление качество образования в МОУ Лебяженской СОШ Краснотуранского района" - скачать презентации по
Презентация на тему "Управление качество образования в МОУ Лебяженской СОШ Краснотуранского района" - скачать презентации по