- Строительная механика. Основы теории метода конечных элементов

Содержание
- 2. Метод конечных элементов (МКЭ) - основной метод современной строительной механики, лежащий в основе подавляющего большинства современных
- 3. Суть метода заключается в том, что область (одно- , двух- или трехмерная), занимаемая конструкцией, разбивается на
- 4. Виды МКЭ По способу получения основных, т. е. разрешающих, уравнений различают четыре основных вида метода конечных
- 5. Вариационный метод основан на принципах стационарности некоторой переменной, зависящей от одной или нескольких функций (такая переменная
- 6. Метод невязок представляет собой наиболее общий подход к построению основных соотношений МКЭ. Этот метод целесообразно применять
- 7. Метод энергетического баланса (метод Одена) основан на балансе различных видов энергии, записанном в интегральной форме. Этот
- 8. Формы МКЭ В МКЭ, аналогично классическим методам строительной механики, за основные неизвестные могут приниматься величины разного
- 9. Метод перемещений – в настоящее время наиболее распространенная форма МКЭ. Это объясняется тем, что для заданной
- 10. Принцип минимума дополнительной энергии и связанные с ним схемы МКЭ в форме метода сил, а также
- 11. Аппроксимация МКЭ относится к методам дискретного анализа. Однако в отличие от численных методов, основывающихся на математической
- 12. Аппроксимирующие функции Аппроксимация, как правило, дает приближенное, а не точное, описание действительного распределения искомых величин в
- 13. Выделенный элемент конструкции имеет те же свойства, что и конструкция в месте расположения элемента. Благодаря такому
- 14. Для каждого элемента можно выбрать оси, в которых можно записывать геометрические или статические условия. Эти оси
- 15. Для системы в целом задаются произвольно выбранные оси, которые называются глобальными осями. На рисунке это оси
- 16. Задачи статики, решаемые с помощью МКЭ, сводятся к следующим основным этапам: 1. Разбиение системы на конечные
- 17. 4. Построение матрицы жесткости конечного элемента и вектора узловых нагрузок. С помощью принципа Лагранжа на основе
- 18. 7. Решение системы алгебраических уравнений. Для решения системы линейных алгебраических уравнений (СЛАУ) используются как точные, так
- 19. РАЗБИЕНИЕ СИСТЕМЫ НА КОНЕЧНЫЕ ЭЛЕМЕНТЫ Данный этап включает в себя разбиение системы на конечные элементы, выбор
- 20. РАЗБИЕНИЕ СИСТЕМЫ НА КОНЕЧНЫЕ ЭЛЕМЕНТЫ Важным моментом в процессе решения задачи по МКЭ является нумерация узлов
- 21. ПОСТРОЕНИЕ ИНТЕРПОЛИРУЮЩИХ ФУНКЦИЙ МКЭ основан на аппроксимации непрерывной функции, определенной на всей области, дискретной моделью с
- 22. ПОСТРОЕНИЕ ИНТЕРПОЛИРУЮЩИХ ФУНКЦИЙ Критерий совместности. Интерполирующая функция должна быть непрерывна вместе со своими производными до (p-l)-гo
- 23. ВЫВОД ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ И ФИЗИЧЕСКИХ СООТНОШЕНИЙ На основе выбранной системы интерполирующих функций выводятся зависимости между деформациями
- 24. ВЫВОД ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ И ФИЗИЧЕСКИХ СООТНОШЕНИЙ Физические соотношения, определяющие зависимость между напряжениями и деформациями, имеют вид
- 25. ПОСТРОЕНИЕ МАТРИЦЫ ЖЕСТКОСТИ КОНЕЧНОГО ЭЛЕМЕНТА И ВЕКТОРА УЗЛОВЫХ НАГРУЗОК Полная потенциальная энергия упругой системы определяется по
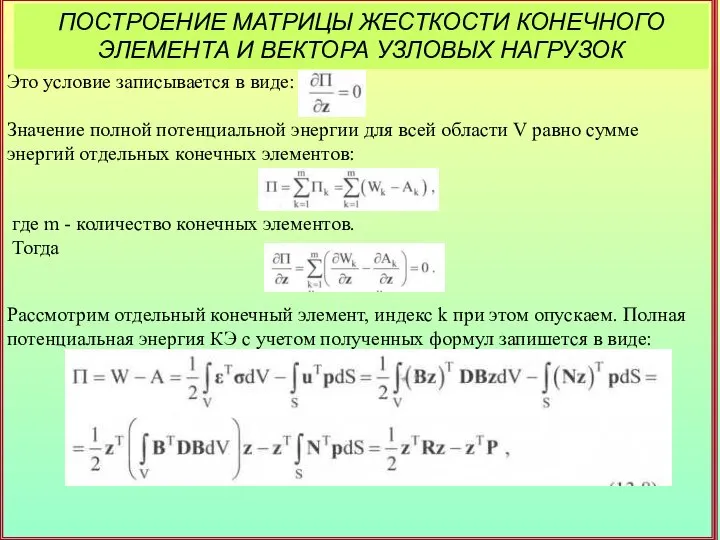
- 26. ПОСТРОЕНИЕ МАТРИЦЫ ЖЕСТКОСТИ КОНЕЧНОГО ЭЛЕМЕНТА И ВЕКТОРА УЗЛОВЫХ НАГРУЗОК Это условие записывается в виде: Значение полной
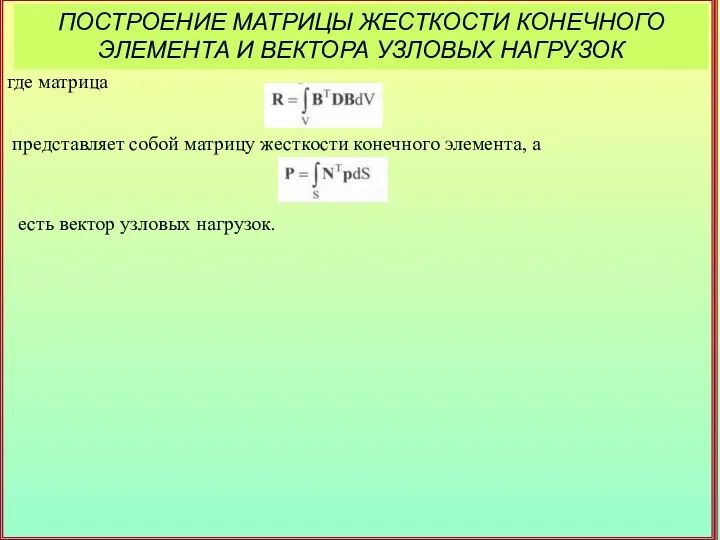
- 27. ПОСТРОЕНИЕ МАТРИЦЫ ЖЕСТКОСТИ КОНЕЧНОГО ЭЛЕМЕНТА И ВЕКТОРА УЗЛОВЫХ НАГРУЗОК где матрица есть вектор узловых нагрузок. представляет
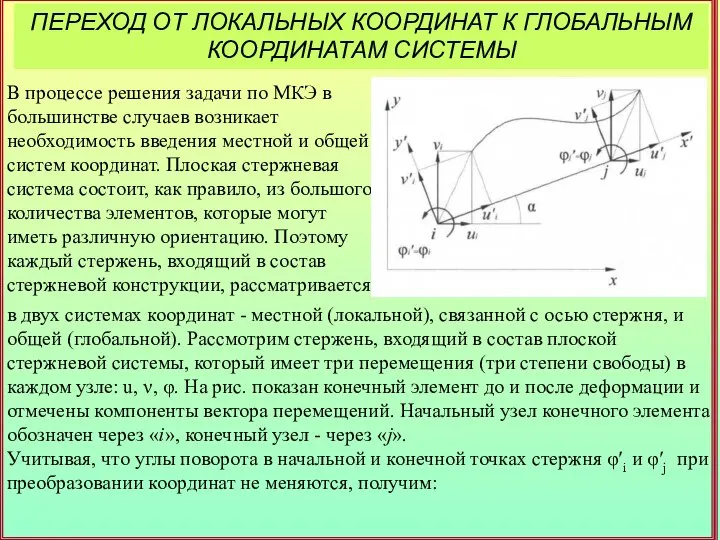
- 28. ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ В процессе решения задачи по МКЭ в большинстве
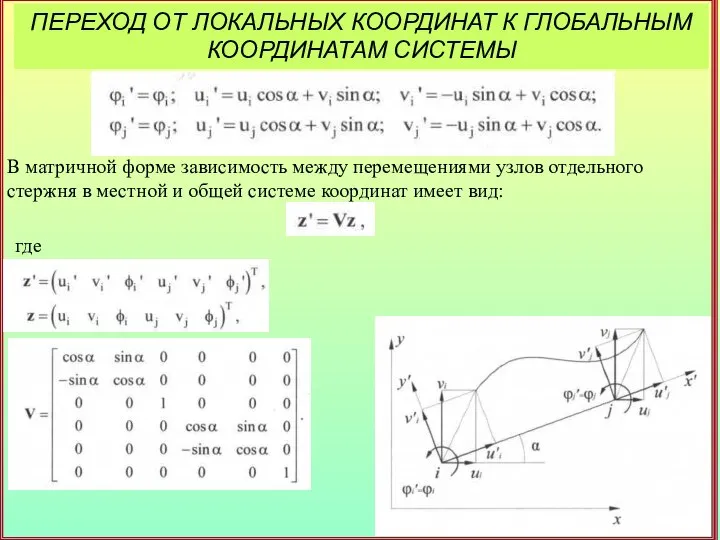
- 29. ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ В матричной форме зависимость между перемещениями узлов отдельного
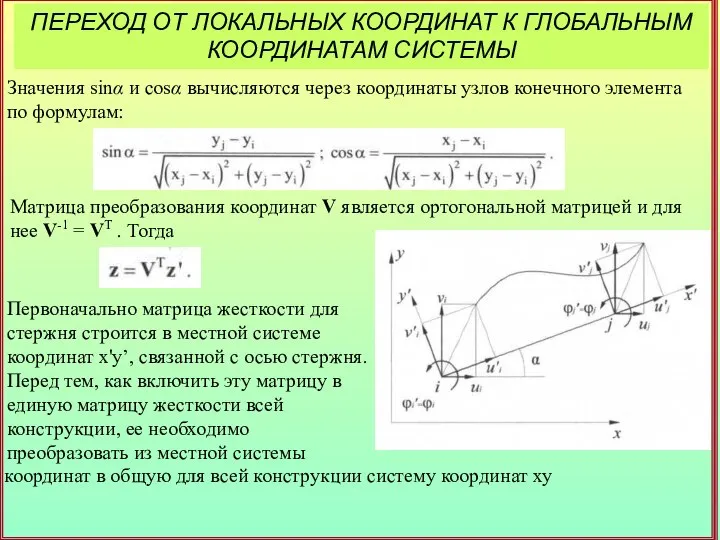
- 30. ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ Значения sinα и cosα вычисляются через координаты узлов
- 31. ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ Для получения зависимости между матрицами жесткости в системах
- 32. ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ Для выполнения операции суммирования необходимо преобразовать векторы
- 33. ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ Полученная система представляет собой систему линейных алгебраических
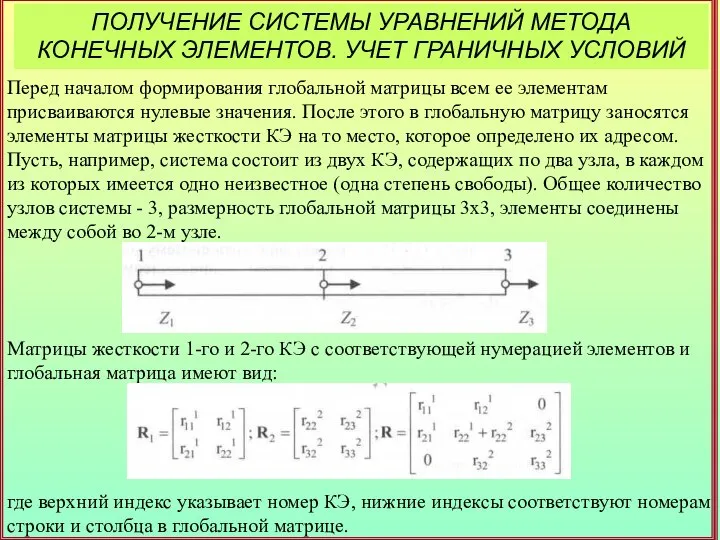
- 34. ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ Перед началом формирования глобальной матрицы всем ее
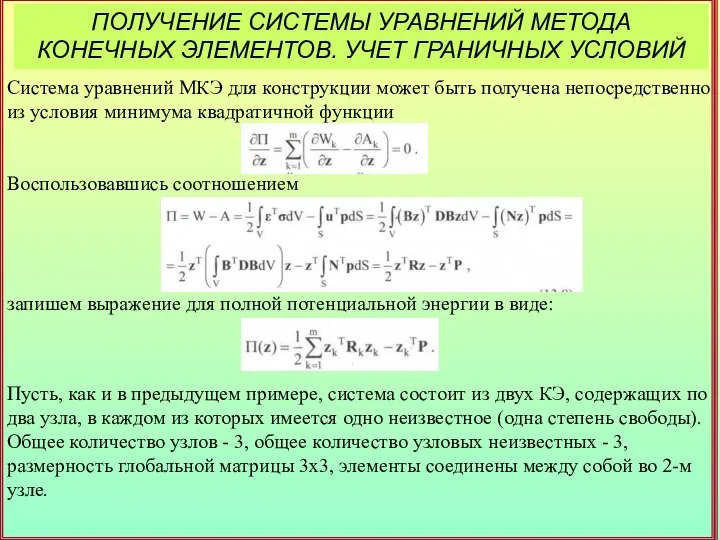
- 35. ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ Система уравнений МКЭ для конструкции может быть
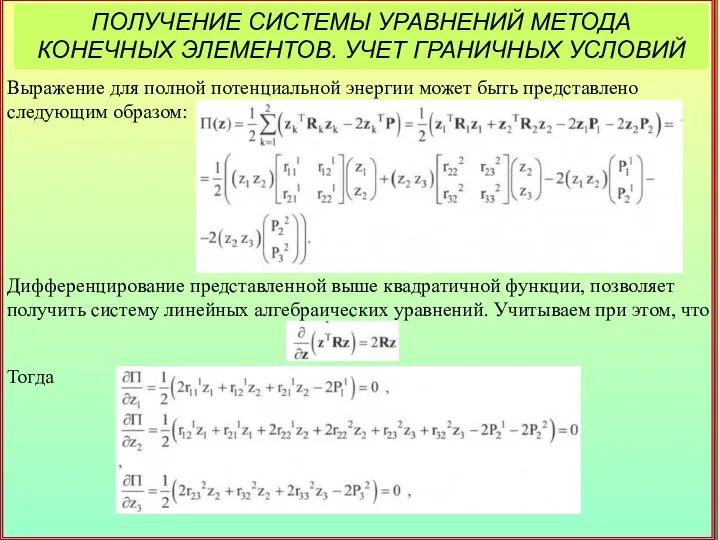
- 36. ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ Выражение для полной потенциальной энергии может быть
- 37. ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ или в матричной форме: Поскольку матрица жесткости
- 38. ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ Учет граничных условий может быть осуществлен различными
- 39. РЕШЕНИЕ СИСТЕМЫ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ Все методы решения систем линейных алгебраических уравнений делятся на две группы -
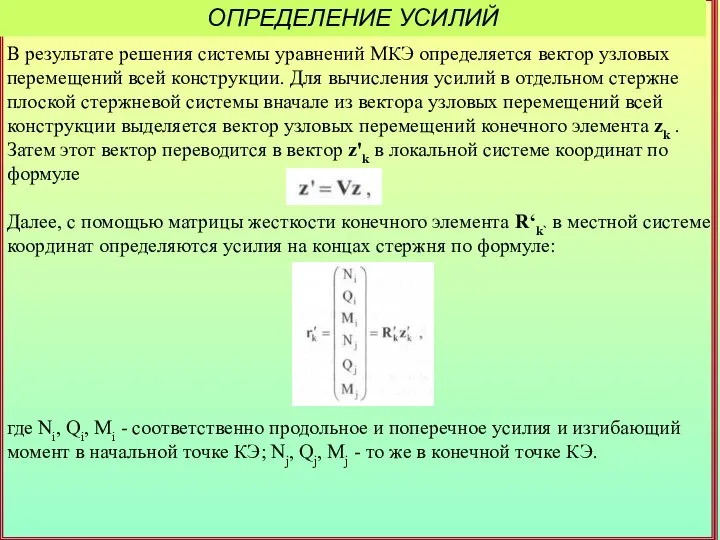
- 40. ОПРЕДЕЛЕНИЕ УСИЛИЙ В результате решения системы уравнений МКЭ определяется вектор узловых перемещений всей конструкции. Для вычисления
- 41. ОПРЕДЕЛЕНИЕ УСИЛИЙ Ранее было принято правило знаков, согласно которому положительные направления усилий совпадают с положительными направлениями
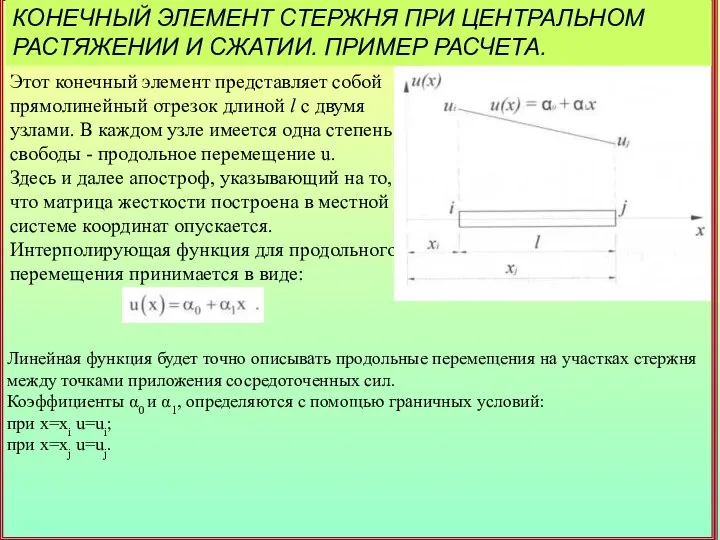
- 42. КОНЕЧНЫЙ ЭЛЕМЕНТ СТЕРЖНЯ ПРИ ЦЕНТРАЛЬНОМ РАСТЯЖЕНИИ И СЖАТИИ. ПРИМЕР РАСЧЕТА. Этот конечный элемент представляет собой прямолинейный
- 44. Скачать презентацию
Метод конечных элементов (МКЭ) - основной метод современной строительной механики, лежащий в
Метод конечных элементов (МКЭ) - основной метод современной строительной механики, лежащий в
Суть метода заключается в том, что область (одно- , двух- или
Суть метода заключается в том, что область (одно- , двух- или
Виды МКЭ
По способу получения основных, т. е. разрешающих, уравнений различают четыре
Виды МКЭ
По способу получения основных, т. е. разрешающих, уравнений различают четыре
Вариационный метод основан на принципах стационарности некоторой переменной, зависящей от одной или
Вариационный метод основан на принципах стационарности некоторой переменной, зависящей от одной или
Метод невязок представляет собой наиболее общий подход к построению основных соотношений МКЭ. Этот метод
Метод невязок представляет собой наиболее общий подход к построению основных соотношений МКЭ. Этот метод
Метод энергетического баланса (метод Одена) основан на балансе различных видов энергии, записанном
Метод энергетического баланса (метод Одена) основан на балансе различных видов энергии, записанном
Формы МКЭ
В МКЭ, аналогично классическим методам строительной механики, за основные неизвестные
Формы МКЭ
В МКЭ, аналогично классическим методам строительной механики, за основные неизвестные
Метод перемещений – в настоящее время наиболее распространенная форма МКЭ. Это объясняется
Метод перемещений – в настоящее время наиболее распространенная форма МКЭ. Это объясняется
Принцип минимума дополнительной энергии и связанные с ним схемы МКЭ в форме метода сил, а
Принцип минимума дополнительной энергии и связанные с ним схемы МКЭ в форме метода сил, а
Аппроксимация
МКЭ относится к методам дискретного анализа. Однако в отличие от численных методов,
Аппроксимация
МКЭ относится к методам дискретного анализа. Однако в отличие от численных методов,
Аппроксимирующие функции
Аппроксимация, как правило, дает приближенное, а не точное, описание действительного
Аппроксимирующие функции
Аппроксимация, как правило, дает приближенное, а не точное, описание действительного
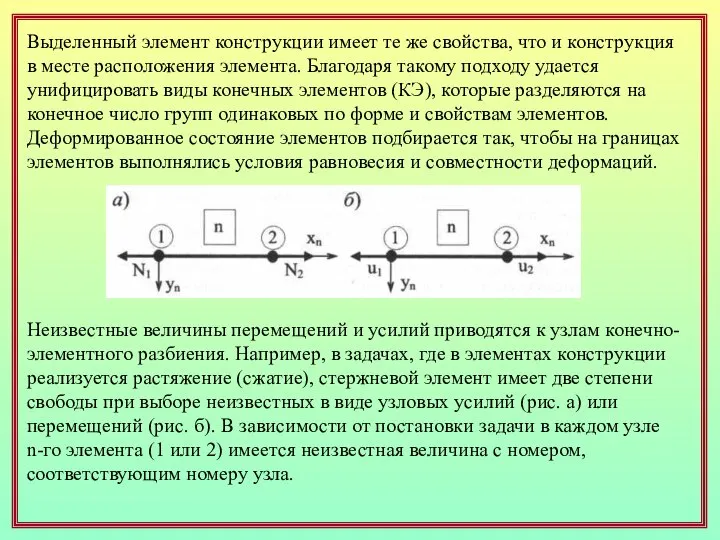
Выделенный элемент конструкции имеет те же свойства, что и конструкция в
Выделенный элемент конструкции имеет те же свойства, что и конструкция в
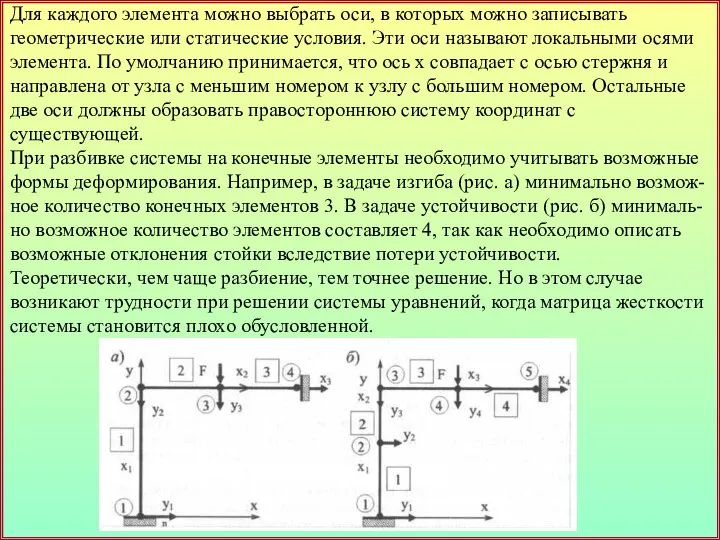
Для каждого элемента можно выбрать оси, в которых можно записывать геометрические
Для каждого элемента можно выбрать оси, в которых можно записывать геометрические
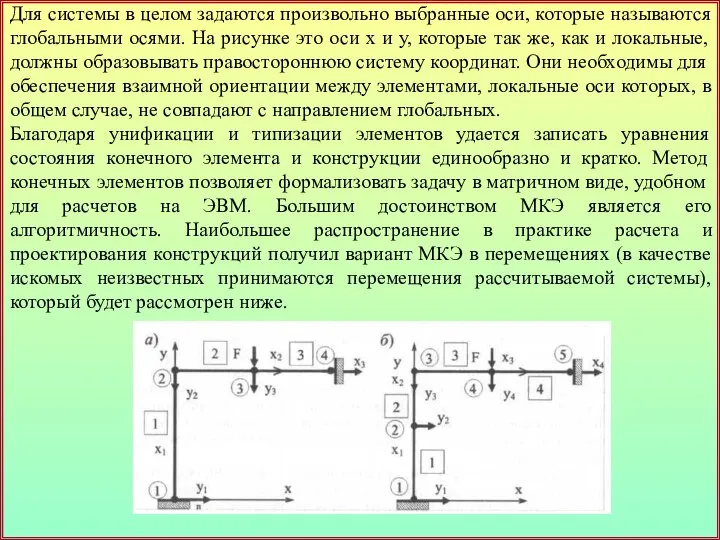
Для системы в целом задаются произвольно выбранные оси, которые называются глобальными
Для системы в целом задаются произвольно выбранные оси, которые называются глобальными
Задачи статики, решаемые с помощью МКЭ, сводятся к следующим основным этапам:
Задачи статики, решаемые с помощью МКЭ, сводятся к следующим основным этапам:
4. Построение матрицы жесткости конечного элемента и вектора узловых нагрузок.
4. Построение матрицы жесткости конечного элемента и вектора узловых нагрузок.
7. Решение системы алгебраических уравнений. Для решения системы линейных алгебраических уравнений
7. Решение системы алгебраических уравнений. Для решения системы линейных алгебраических уравнений
РАЗБИЕНИЕ СИСТЕМЫ НА КОНЕЧНЫЕ ЭЛЕМЕНТЫ
Данный этап включает в себя разбиение системы
РАЗБИЕНИЕ СИСТЕМЫ НА КОНЕЧНЫЕ ЭЛЕМЕНТЫ
Данный этап включает в себя разбиение системы
РАЗБИЕНИЕ СИСТЕМЫ НА КОНЕЧНЫЕ ЭЛЕМЕНТЫ
Важным моментом в процессе решения задачи по
РАЗБИЕНИЕ СИСТЕМЫ НА КОНЕЧНЫЕ ЭЛЕМЕНТЫ
Важным моментом в процессе решения задачи по
ПОСТРОЕНИЕ ИНТЕРПОЛИРУЮЩИХ ФУНКЦИЙ
МКЭ основан на аппроксимации непрерывной функции, определенной на всей
ПОСТРОЕНИЕ ИНТЕРПОЛИРУЮЩИХ ФУНКЦИЙ
МКЭ основан на аппроксимации непрерывной функции, определенной на всей
ПОСТРОЕНИЕ ИНТЕРПОЛИРУЮЩИХ ФУНКЦИЙ
Критерий совместности. Интерполирующая функция должна быть непрерывна вместе со
ПОСТРОЕНИЕ ИНТЕРПОЛИРУЮЩИХ ФУНКЦИЙ
Критерий совместности. Интерполирующая функция должна быть непрерывна вместе со
ВЫВОД ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ И ФИЗИЧЕСКИХ СООТНОШЕНИЙ
На основе выбранной системы интерполирующих функций
ВЫВОД ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ И ФИЗИЧЕСКИХ СООТНОШЕНИЙ
На основе выбранной системы интерполирующих функций
ВЫВОД ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ И ФИЗИЧЕСКИХ СООТНОШЕНИЙ
Физические соотношения, определяющие зависимость между напряжениями
ВЫВОД ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ И ФИЗИЧЕСКИХ СООТНОШЕНИЙ
Физические соотношения, определяющие зависимость между напряжениями
ПОСТРОЕНИЕ МАТРИЦЫ ЖЕСТКОСТИ КОНЕЧНОГО ЭЛЕМЕНТА И ВЕКТОРА УЗЛОВЫХ НАГРУЗОК
Полная потенциальная энергия
ПОСТРОЕНИЕ МАТРИЦЫ ЖЕСТКОСТИ КОНЕЧНОГО ЭЛЕМЕНТА И ВЕКТОРА УЗЛОВЫХ НАГРУЗОК
Полная потенциальная энергия
ПОСТРОЕНИЕ МАТРИЦЫ ЖЕСТКОСТИ КОНЕЧНОГО ЭЛЕМЕНТА И ВЕКТОРА УЗЛОВЫХ НАГРУЗОК
Это условие записывается
ПОСТРОЕНИЕ МАТРИЦЫ ЖЕСТКОСТИ КОНЕЧНОГО ЭЛЕМЕНТА И ВЕКТОРА УЗЛОВЫХ НАГРУЗОК
Это условие записывается
ПОСТРОЕНИЕ МАТРИЦЫ ЖЕСТКОСТИ КОНЕЧНОГО ЭЛЕМЕНТА И ВЕКТОРА УЗЛОВЫХ НАГРУЗОК
где матрица
есть вектор
ПОСТРОЕНИЕ МАТРИЦЫ ЖЕСТКОСТИ КОНЕЧНОГО ЭЛЕМЕНТА И ВЕКТОРА УЗЛОВЫХ НАГРУЗОК
где матрица
есть вектор
ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ
В процессе решения задачи
ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ
В процессе решения задачи
ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ
В матричной форме зависимость
ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ
В матричной форме зависимость
ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ
Значения sinα и cosα
ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ
Значения sinα и cosα
ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ
Для получения зависимости между
ПЕРЕХОД ОТ ЛОКАЛЬНЫХ КООРДИНАТ К ГЛОБАЛЬНЫМ КООРДИНАТАМ СИСТЕМЫ
Для получения зависимости между
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Для выполнения операции
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Для выполнения операции
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Полученная система представляет
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Полученная система представляет
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Перед началом формирования
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Перед началом формирования
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Система уравнений МКЭ
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Система уравнений МКЭ
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Выражение для полной
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Выражение для полной

ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
или в матричной
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
или в матричной
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Учет граничных условий
ПОЛУЧЕНИЕ СИСТЕМЫ УРАВНЕНИЙ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ. УЧЕТ ГРАНИЧНЫХ УСЛОВИЙ
Учет граничных условий
РЕШЕНИЕ СИСТЕМЫ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
Все методы решения систем линейных алгебраических уравнений делятся
РЕШЕНИЕ СИСТЕМЫ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
Все методы решения систем линейных алгебраических уравнений делятся
ОПРЕДЕЛЕНИЕ УСИЛИЙ
В результате решения системы уравнений МКЭ определяется вектор узловых перемещений
ОПРЕДЕЛЕНИЕ УСИЛИЙ
В результате решения системы уравнений МКЭ определяется вектор узловых перемещений
ОПРЕДЕЛЕНИЕ УСИЛИЙ
Ранее было принято правило знаков, согласно которому положительные направления усилий
ОПРЕДЕЛЕНИЕ УСИЛИЙ
Ранее было принято правило знаков, согласно которому положительные направления усилий
КОНЕЧНЫЙ ЭЛЕМЕНТ СТЕРЖНЯ ПРИ ЦЕНТРАЛЬНОМ РАСТЯЖЕНИИ И СЖАТИИ. ПРИМЕР РАСЧЕТА.
Этот конечный
КОНЕЧНЫЙ ЭЛЕМЕНТ СТЕРЖНЯ ПРИ ЦЕНТРАЛЬНОМ РАСТЯЖЕНИИ И СЖАТИИ. ПРИМЕР РАСЧЕТА.
Этот конечный
 Алгоритм управления и кибернетика
Алгоритм управления и кибернетика Берлитион
Берлитион  Презентация "Что такое экономика" - скачать презентации по Экономике
Презентация "Что такое экономика" - скачать презентации по Экономике Культура японского народа
Культура японского народа Как проверить, попадает ли ваш земельный участок в приаэродромные территории аэродромов
Как проверить, попадает ли ваш земельный участок в приаэродромные территории аэродромов TABU-элементы: все разрешено, что распространяется само Антон Попов, КИБ 2008
TABU-элементы: все разрешено, что распространяется само Антон Попов, КИБ 2008 Биполярные транзисторы
Биполярные транзисторы Электрические датчики механических величин
Электрические датчики механических величин Політична партія “Україна – вперед”
Політична партія “Україна – вперед” Формулирование собственного высказывания по проблеме профессиональной направленности Урок-тренинг устной и письменной речи
Формулирование собственного высказывания по проблеме профессиональной направленности Урок-тренинг устной и письменной речи Выпуклый анализ. Пространство подмножеств. Лекция 1
Выпуклый анализ. Пространство подмножеств. Лекция 1 «В игре детей есть часто смысл глубокий» Не зная прошлого, нельзя понять настоящего, нельзя ме
«В игре детей есть часто смысл глубокий» Не зная прошлого, нельзя понять настоящего, нельзя ме Начни свое дело с компанией Живая вода
Начни свое дело с компанией Живая вода Hockey-Russia
Hockey-Russia Джеффри Лайкер «Дао Toyota: 14 принципов менеджмента ведущей компании мира»
Джеффри Лайкер «Дао Toyota: 14 принципов менеджмента ведущей компании мира» Талшықты лазер
Талшықты лазер Характер
Характер Сказки гуляют по свету - презентация для начальной школы_
Сказки гуляют по свету - презентация для начальной школы_ Русские народные пословицы и поговорки
Русские народные пословицы и поговорки Ремонт парка пресс-форм. Литьё пластиковых изделий
Ремонт парка пресс-форм. Литьё пластиковых изделий Основы языка C#
Основы языка C# Исполнение наказаний, не связанных с изоляцией осужденных от общества (НСИО). Тема № 6
Исполнение наказаний, не связанных с изоляцией осужденных от общества (НСИО). Тема № 6 Родительское собрание "Стили семейного воспитания"
Родительское собрание "Стили семейного воспитания" Тоталитаризм. Отрицательные черты
Тоталитаризм. Отрицательные черты Творческий проект 8
Творческий проект 8 Русская народная кукла: обычаи и традиции
Русская народная кукла: обычаи и традиции День инвестора Центральной и Восточной Европы (IDCEE) Интернет-технологии и инновации 25-26 октября, 2011 Киев, Украина
День инвестора Центральной и Восточной Европы (IDCEE) Интернет-технологии и инновации 25-26 октября, 2011 Киев, Украина Экспериментальное решение проблемы течи гидроблока МТА
Экспериментальное решение проблемы течи гидроблока МТА