- Строительная механика. Статически определимые плоские комбинированные системы

Содержание
- 2. Комбинированной называется геометрически неизменяемая система, состоящая из различных по характеру своей работы частей, совместно участвующих в
- 3. Система не является комбинированной!
- 4. Типовые схемы статически определимых плоских комбинированных систем Шпренгельные балки Рамы и арки с составными затяжками Комбинированные
- 5. А В С 1 2 3 4 Структурный анализ А В С 1 2 3 4
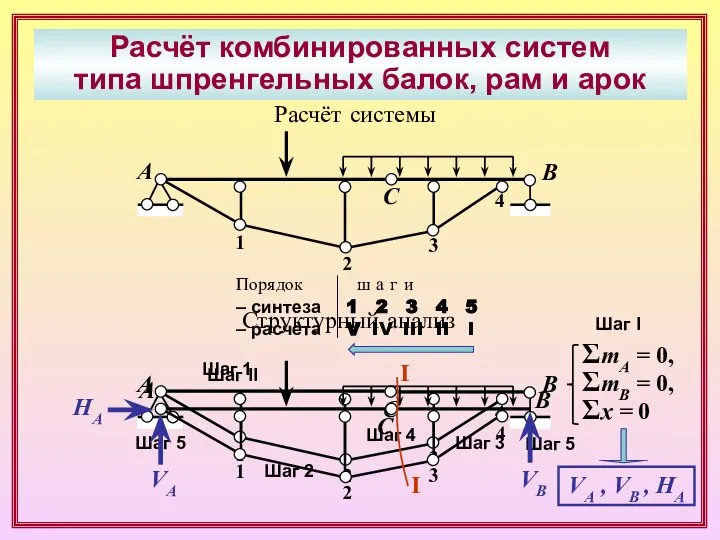
- 6. Расчёт комбинированных систем типа шпренгельных балок, рам и арок А В С 1 2 3 4
- 7. Расчёт комбинированных систем типа шпренгельных балок, рам и арок А В С 1 2 3 4
- 8. Расчёт комбинированных систем типа шпренгельных балок, рам и арок А В С 1 2 3 4
- 9. Расчёт комбинированных систем типа шпренгельных балок, рам и арок А В С 1 2 3 4
- 10. Расчёт комбинированных систем типа шпренгельных балок, рам и арок А В С 1 2 3 4
- 11. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А В С i 2 3 n
- 12. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А В С Кинематический анализ i* 2*
- 13. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А В С i 2 3 n
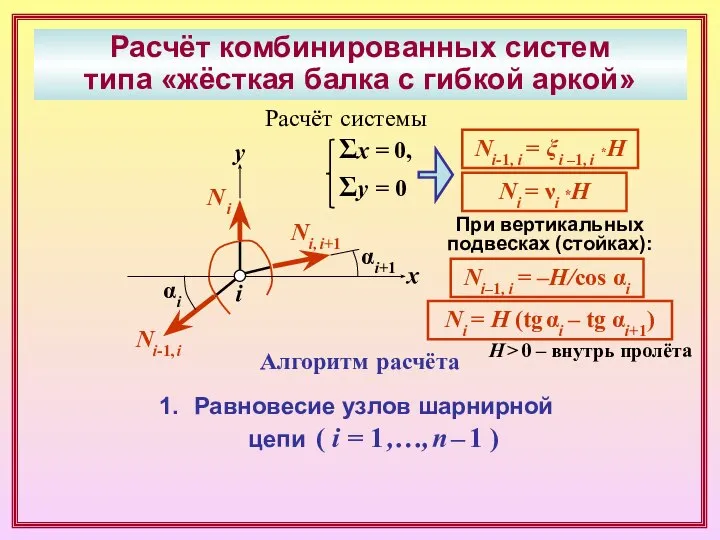
- 14. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» i Расчёт системы αi αi+1 Ni-1, i
- 15. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А В С i 2 3 n
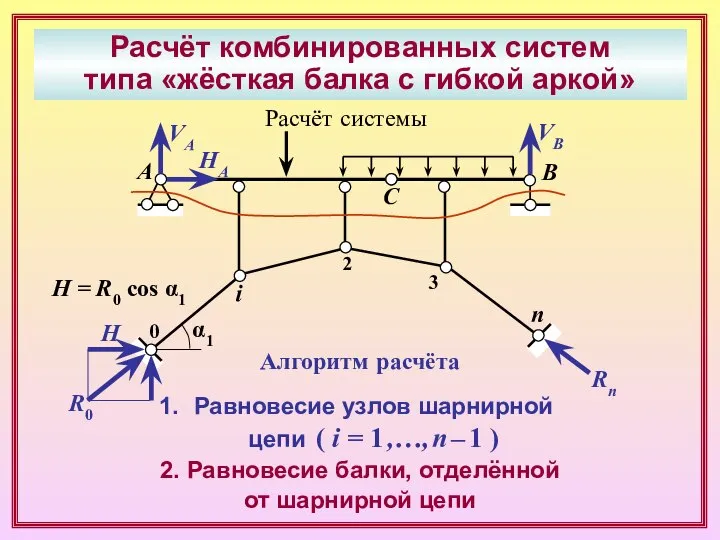
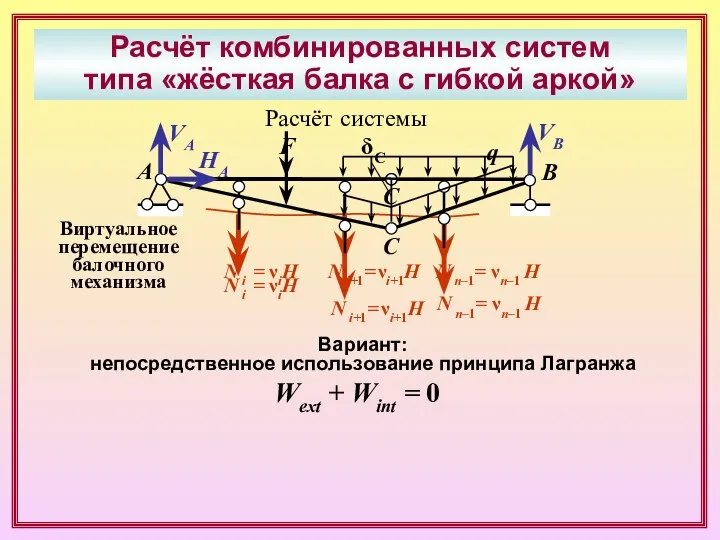
- 16. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А В С Расчёт системы VА VВ
- 17. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А В С Расчёт системы VА VВ
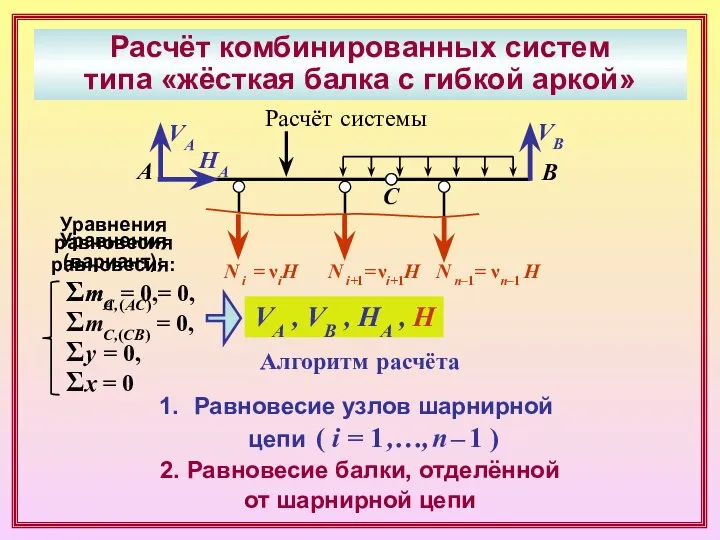
- 18. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А В Расчёт системы VА VВ HА
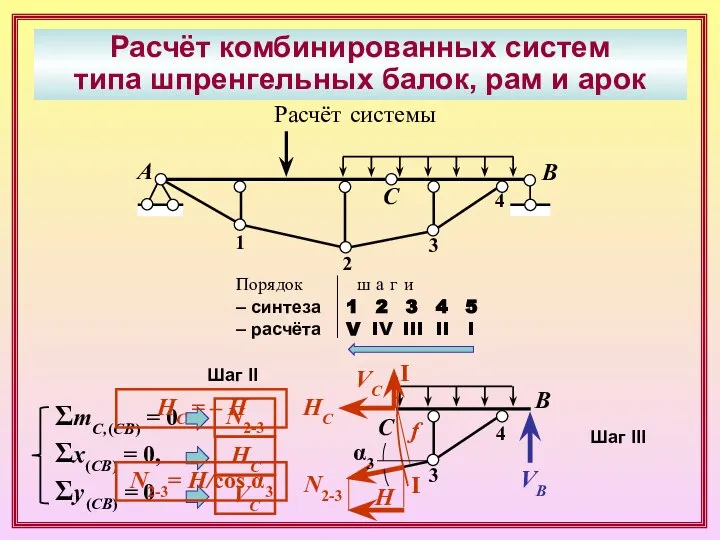
- 19. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» Расчет системы H ΣmC,(CB) = 0, Σy
- 20. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А В С i 2 3 n
- 21. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А/ B/ C/ Аналогия с трёхшарнирной аркой
- 22. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А/ B/ C/ Аналогия с трёхшарнирной аркой
- 24. Скачать презентацию
Комбинированной называется геометрически неизменяемая система, состоящая из различных
по характеру своей
по характеру своей
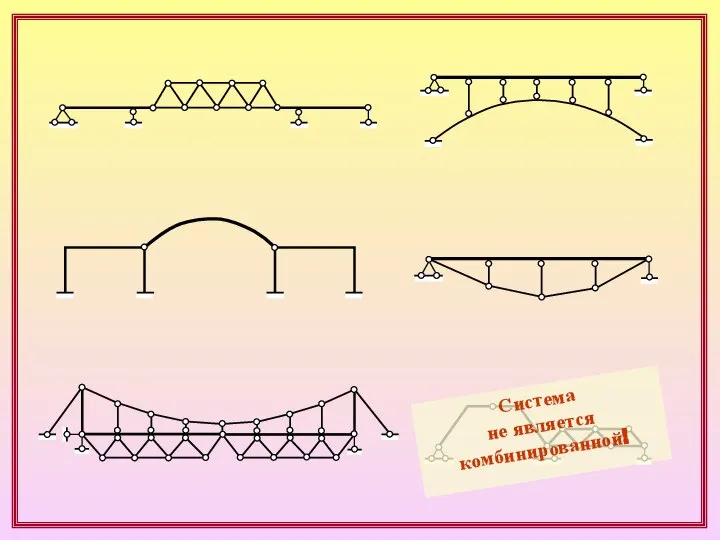
Система
не является
комбинированной!
Система
не является
комбинированной!
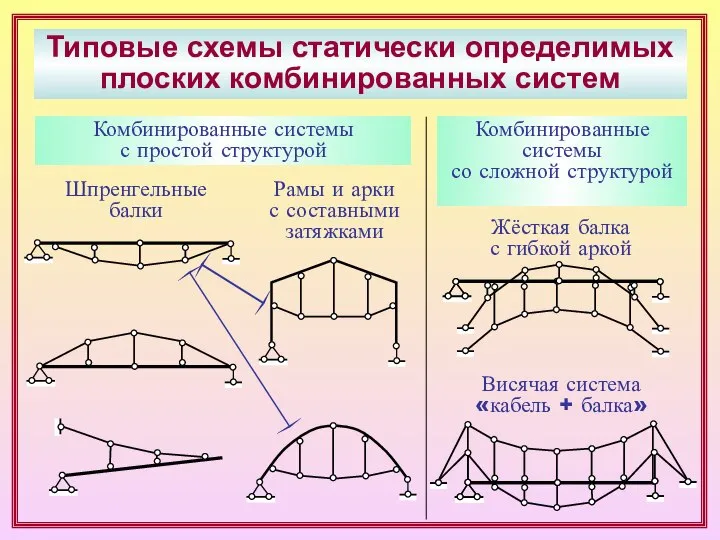
Типовые схемы статически определимых плоских комбинированных систем
Шпренгельные
балки
Рамы и арки
с составными
затяжками
Комбинированные
Типовые схемы статически определимых плоских комбинированных систем
Шпренгельные
балки
Рамы и арки
с составными
затяжками
Комбинированные
А
В
С
1
2
3
4
Структурный анализ
А
В
С
1
2
3
4
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
1
Шаг 1
2
Шаг 2
3
4
Шаг
А
В
С
1
2
3
4
Структурный анализ
А
В
С
1
2
3
4
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
1
Шаг 1
2
Шаг 2
3
4
Шаг
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
II
II
А
В
С
4
II
II
VА
VB
N1
N2
N3
N1-0
N3-4
Эпюры M, Q,
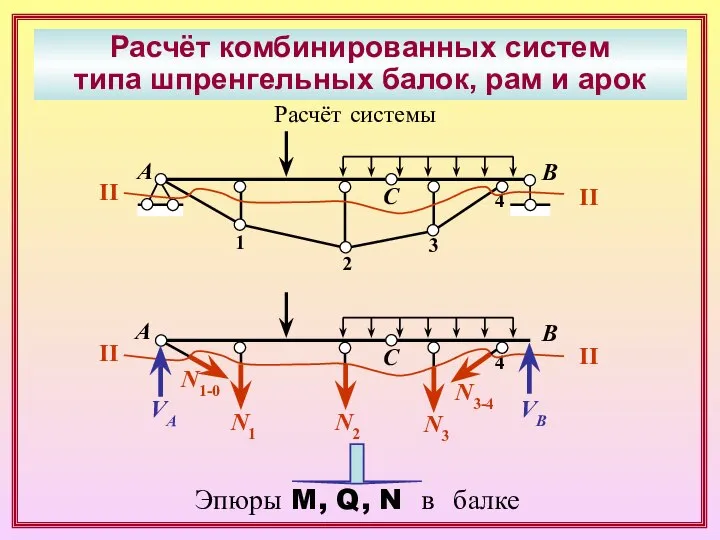
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
II
II
А
В
С
4
II
II
VА
VB
N1
N2
N3
N1-0
N3-4
Эпюры M, Q,
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
i
2
3
n
0
?
Кинематический анализ
i*
2*
3*
W = 0
Направление
удалённой
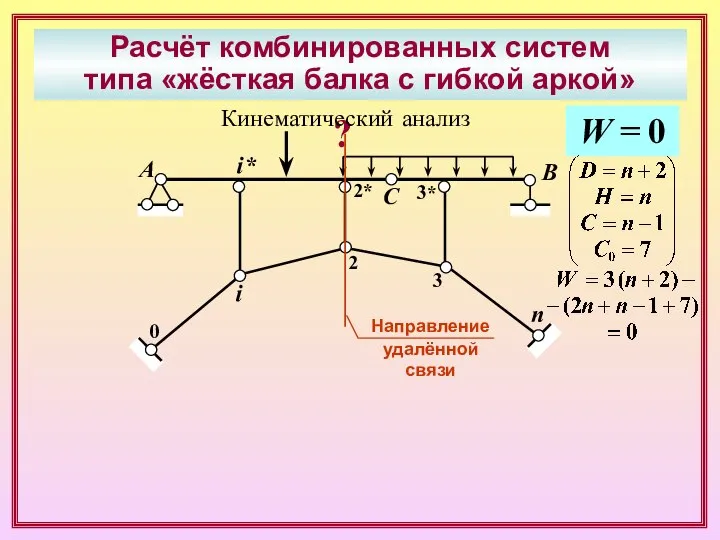
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
i
2
3
n
0
?
Кинематический анализ
i*
2*
3*
W = 0
Направление
удалённой
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
Кинематический анализ
i*
2*
3*
i
2
3
n
0
Направление
удалённой связи
i*
i
3*
3
2*
2
С
W
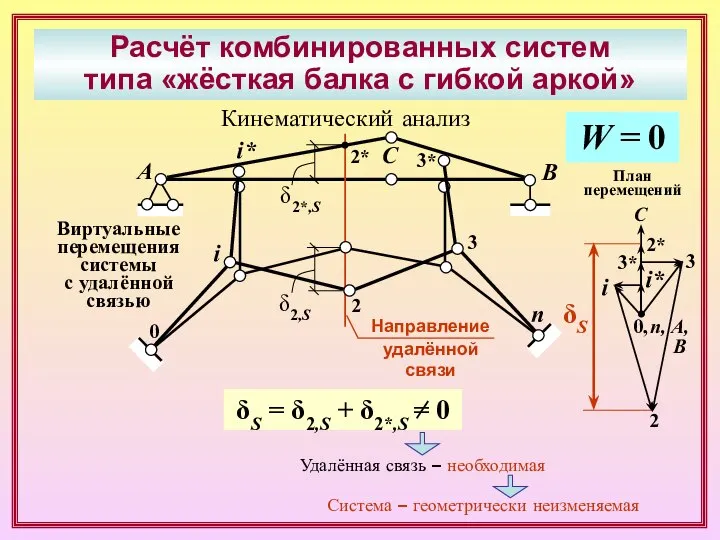
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
Кинематический анализ
i*
2*
3*
i
2
3
n
0
Направление
удалённой связи
i*
i
3*
3
2*
2
С
W
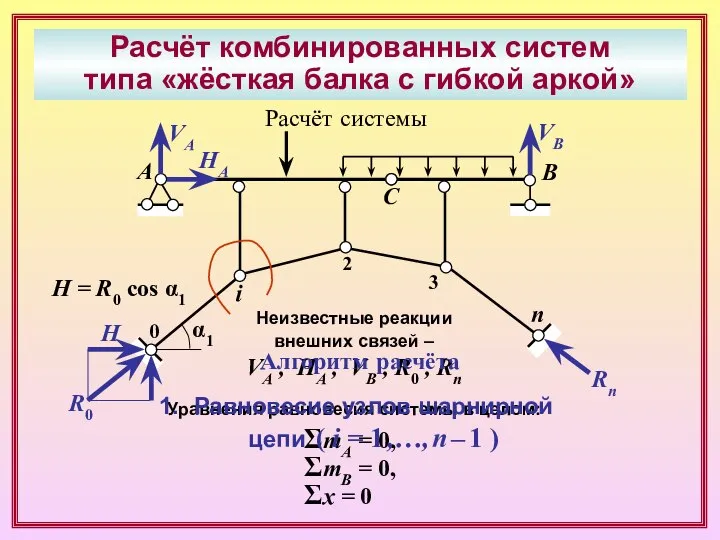
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
i
2
3
n
0
Расчёт системы
VА
VВ
R0
Rn
HА
H
α1
H = R0
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
i
2
3
n
0
Расчёт системы
VА
VВ
R0
Rn
HА
H
α1
H = R0
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
i
Расчёт системы
αi
αi+1
Ni-1, i
Ni, i+1
N
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
i
Расчёт системы
αi
αi+1
Ni-1, i
Ni, i+1
N
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
i
2
3
n
0
Расчёт системы
VА
VВ
R0
Rn
HА
H
α1
H = R0
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
i
2
3
n
0
Расчёт системы
VА
VВ
R0
Rn
HА
H
α1
H = R0
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
Расчёт системы
VА
VВ
HА
Алгоритм расчёта
Равновесие узлов
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
Расчёт системы
VА
VВ
HА
Алгоритм расчёта
Равновесие узлов
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
Расчёт системы
VА
VВ
HА
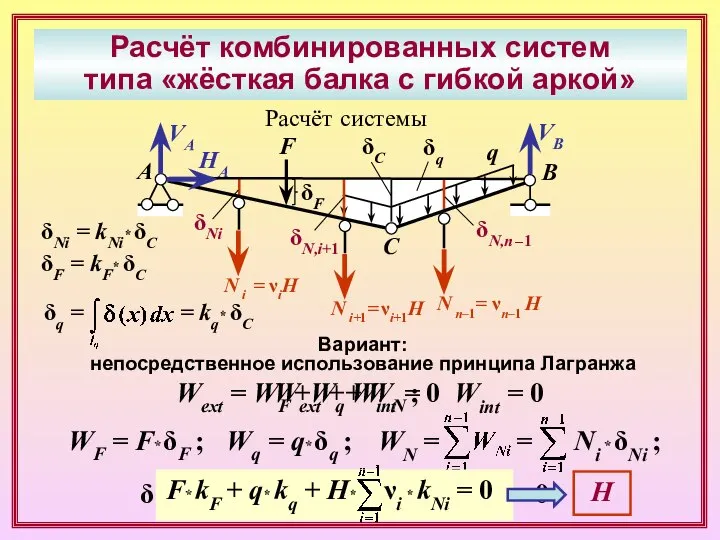
Вариант:
непосредственное использование
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
Расчёт системы
VА
VВ
HА
Вариант:
непосредственное использование
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
Расчёт системы
VА
VВ
HА
Вариант:
непосредственное использование
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
Расчёт системы
VА
VВ
HА
Вариант:
непосредственное использование
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
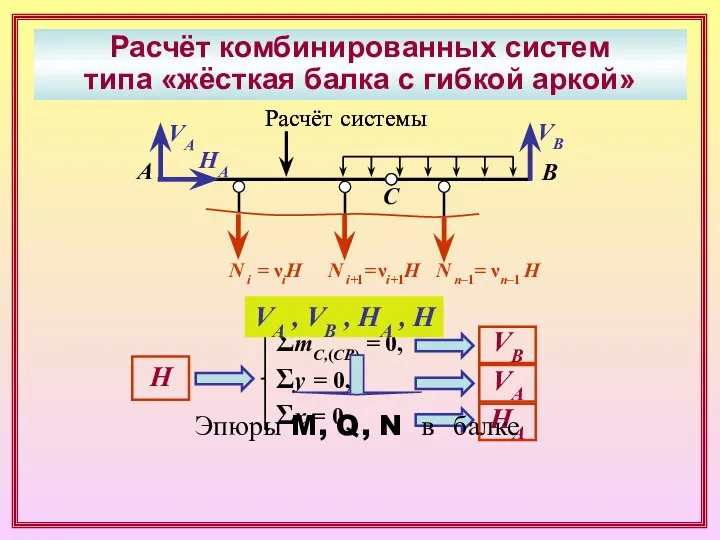
Расчет системы
H
ΣmC,(CB) = 0,
Σy
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
Расчет системы
H
ΣmC,(CB) = 0,
Σy
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
i
2
3
n
0
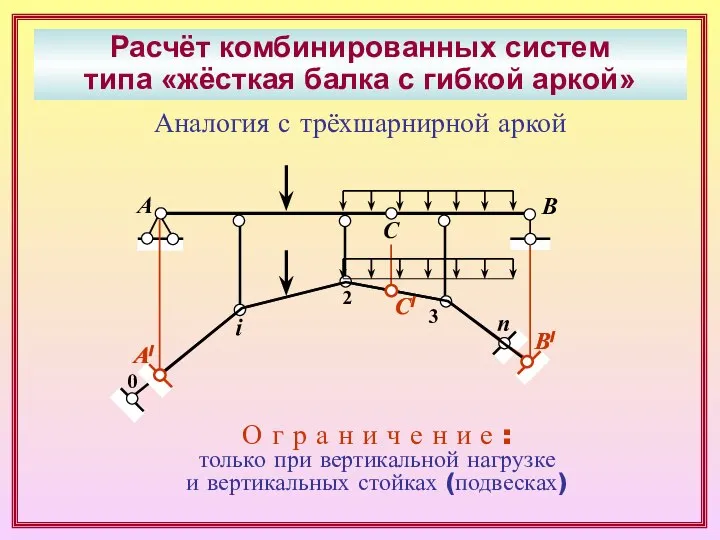
Аналогия с трёхшарнирной аркой
О
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
i
2
3
n
0
Аналогия с трёхшарнирной аркой
О
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А/
B/
C/
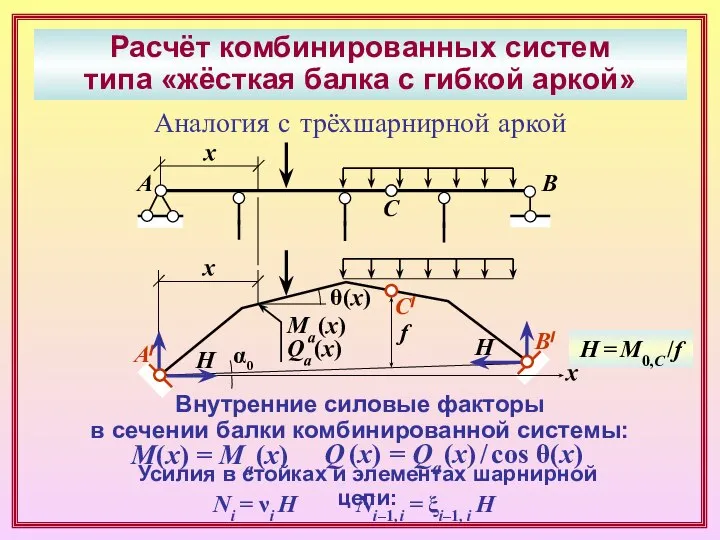
Аналогия с трёхшарнирной аркой
х
θ(х)
Qа
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А/
B/
C/
Аналогия с трёхшарнирной аркой
х
θ(х)
Qа

Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А/
B/
C/
Аналогия с трёхшарнирной аркой
θK’
А
В
С
хK
х
α0
H
H
f
Л.В.
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А/
B/
C/
Аналогия с трёхшарнирной аркой
θK’
А
В
С
хK
х
α0
H
H
f
Л.В.
 Межнациональные особенности невербального общения Выполнила студентка группы Ю-104 Чуева Яна
Межнациональные особенности невербального общения Выполнила студентка группы Ю-104 Чуева Яна Основы общественного производства. Воспроизводство и его фазы.
Основы общественного производства. Воспроизводство и его фазы. Образовательная технология «Портфолио»
Образовательная технология «Портфолио» Агбис
Агбис Движения земной коры
Движения земной коры Вербное воскресение. Неделя перед Пасхой
Вербное воскресение. Неделя перед Пасхой Презентация на тему "Инфекционная иммунология" - скачать презентации по Медицине
Презентация на тему "Инфекционная иммунология" - скачать презентации по Медицине Четыре вида стиля интерьера: ампир, классический, модерн, Ар Деко
Четыре вида стиля интерьера: ампир, классический, модерн, Ар Деко Современное состояние системы подготовки спортивного резерва в Пермском крае
Современное состояние системы подготовки спортивного резерва в Пермском крае От фантазии к реализации
От фантазии к реализации Олимпийские игры в древней Греции: система обслуживания спортсменов и гостей
Олимпийские игры в древней Греции: система обслуживания спортсменов и гостей Зимующие птицы Автор презентации: Калмычкова Е.В., учитель начальных классов ГБОУ СОШ 1980 города Москвы.
Зимующие птицы Автор презентации: Калмычкова Е.В., учитель начальных классов ГБОУ СОШ 1980 города Москвы. Основные направления применения педагогических средств восстановления
Основные направления применения педагогических средств восстановления Шайхиева Надежда Ивановна, учитель изобразительного искусства МОБУ СОШ№3 им.Ю.Гагарина г. Таганрога Ростовской области
Шайхиева Надежда Ивановна, учитель изобразительного искусства МОБУ СОШ№3 им.Ю.Гагарина г. Таганрога Ростовской области Анализ переходных процессов классическим методом в цепях с одним реактивным элементом. (Лекция 3)
Анализ переходных процессов классическим методом в цепях с одним реактивным элементом. (Лекция 3) Презентация "Роль денег в регулировании экономики" - скачать презентации по Экономике
Презентация "Роль денег в регулировании экономики" - скачать презентации по Экономике Презентация на тему "Использование метода проектов в начальной школе" - скачать презентации по Педагогике
Презентация на тему "Использование метода проектов в начальной школе" - скачать презентации по Педагогике Разработка Web-технологий в сопровождении НОЦ
Разработка Web-технологий в сопровождении НОЦ Chesotka
Chesotka Организация транспортного обслуживания международных экономических связей
Организация транспортного обслуживания международных экономических связей Презентация____
Презентация____ Презентация на тему "Рефлекс. Рефлекторная дуга" - скачать презентации по Медицине
Презентация на тему "Рефлекс. Рефлекторная дуга" - скачать презентации по Медицине Виды и системы безопасности
Виды и системы безопасности  Основные понятия языка
Основные понятия языка Основы технологической культуры Технология трудовой деятельности Степанова Лариса Иосифовна, учитель технологии МОУ «ТСОШ №3»
Основы технологической культуры Технология трудовой деятельности Степанова Лариса Иосифовна, учитель технологии МОУ «ТСОШ №3» Презентация "Авторское кино в России" - скачать презентации по МХК
Презентация "Авторское кино в России" - скачать презентации по МХК ГРОСС ГАНС и его основные идеи в криминалистике и юридической психологии. Подготовила: Студентка 2 курса Группы Юб03/1303 Шестёр
ГРОСС ГАНС и его основные идеи в криминалистике и юридической психологии. Подготовила: Студентка 2 курса Группы Юб03/1303 Шестёр Глава 1 Принципы экономики 3. Рыночная система экономики
Глава 1 Принципы экономики 3. Рыночная система экономики