- Т20 АЗРН1.ppt

Содержание
- 2. * Загальні відомості про автономні засоби радіонавігації. Автоматичні радіокомпаси. Радіовисотоміри. Особливості конструкції та органи управління радіокомпасів
- 3. * Контрольні завдання (АЗРН1) Обгрунтуйте можливе місцеположення літака, якщо курсові кути двох радіостанцій становлять ККР1=35о і
- 4. Рух літака у полі тяжіння Землі в географічній системі координат (довгота θ, широта φ та відстань
- 5. Через недосконалість ПНК та інші причини з часом помилки визначення навігаційних параметрів зростають і необхідно корегувати
- 6. Пілотажно-навігаційний комплекс – це інформаційно-керуюча система для вирішення навігаційних і пілотажних задач. До складу ПНК можуть
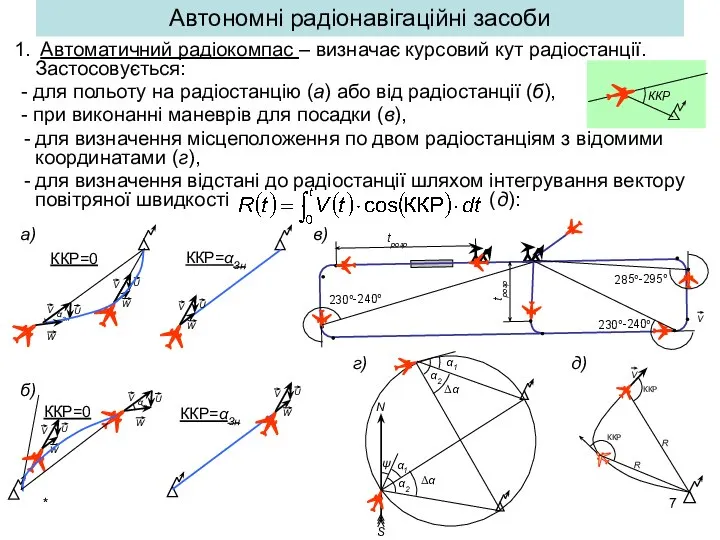
- 7. * Автономні радіонавігаційні засоби Автоматичний радіокомпас – визначає курсовий кут радіостанції. Застосовується: - для польоту на
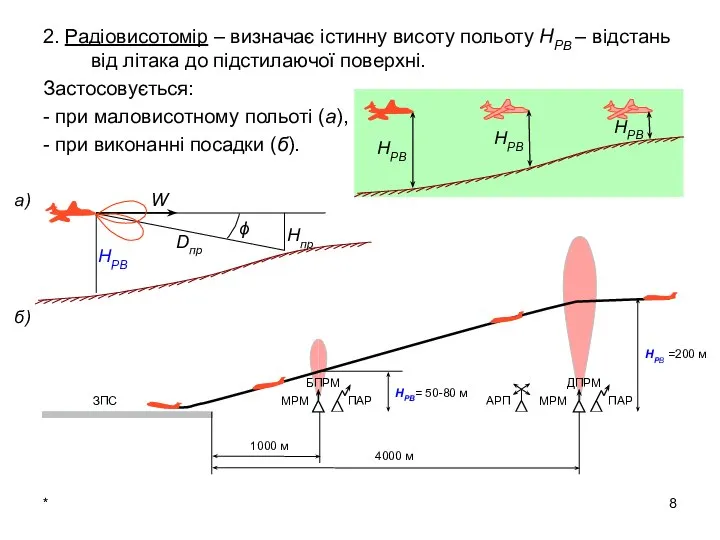
- 8. * 2. Радіовисотомір – визначає істинну висоту польоту НРВ – відстань від літака до підстилаючої поверхні.
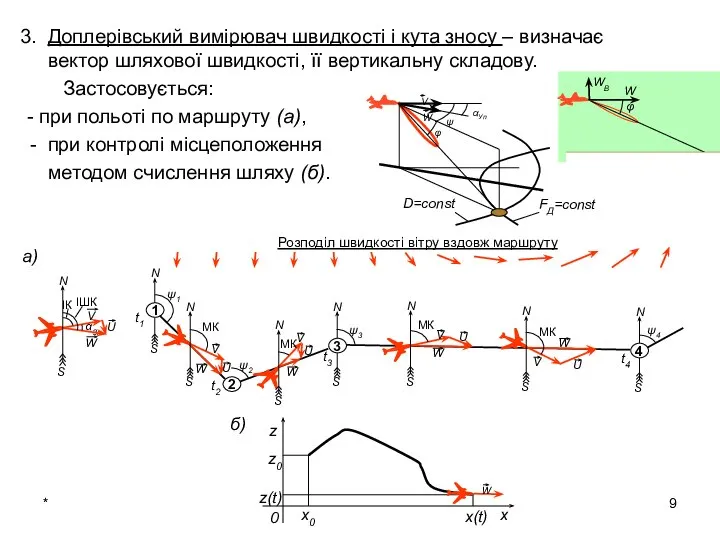
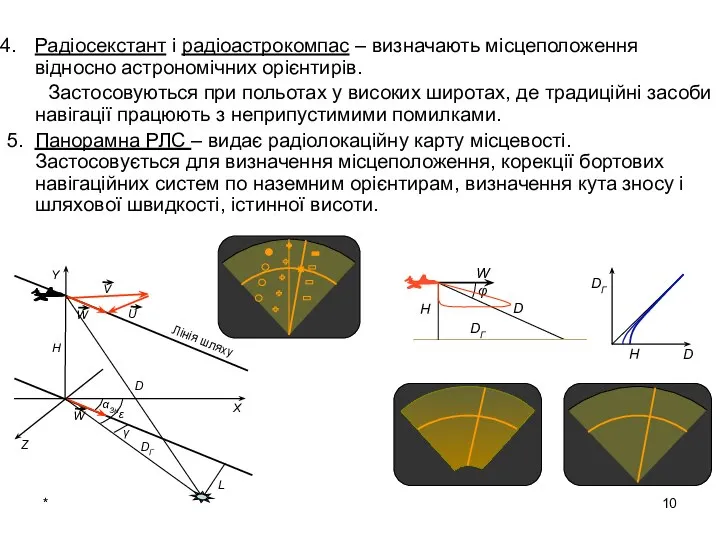
- 9. * Доплерівський вимірювач швидкості і кута зносу – визначає вектор шляхової швидкості, її вертикальну складову. Застосовується:
- 10. * Радіосекстант і радіоастрокомпас – визначають місцеположення відносно астрономічних орієнтирів. Застосовуються при польотах у високих широтах,
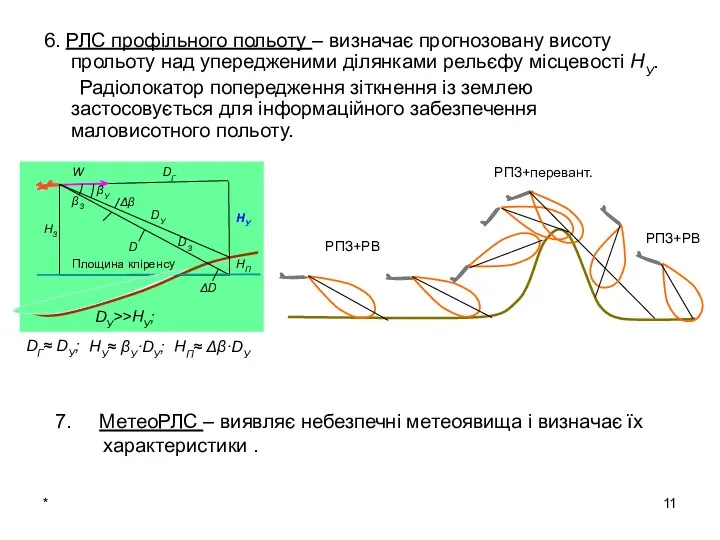
- 11. * 6. РЛС профільного польоту – визначає прогнозовану висоту прольоту над упередженими ділянками рельєфу місцевості НУ.
- 12. * Принципи отримання радіонавігаційної інформації Навігаційна інформація (поточні координати, параметри руху) отримується із радіосигналів спеціальних радіомаяків
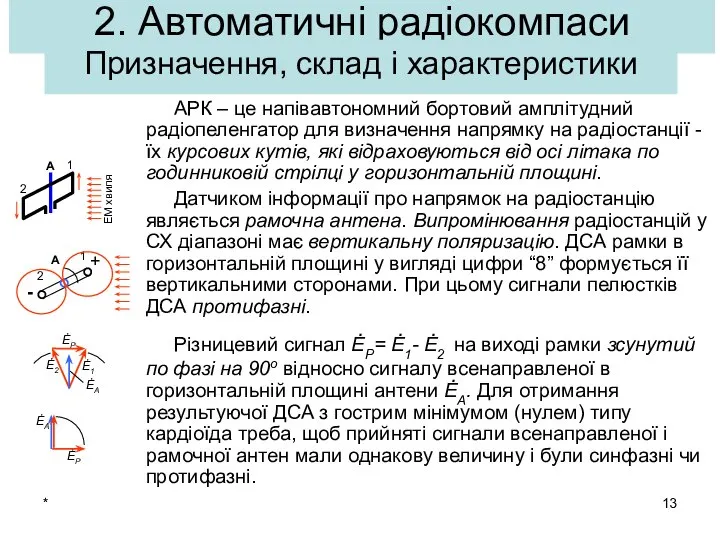
- 13. * АРК – це напівавтономний бортовий амплітудний радіопеленгатор для визначення напрямку на радіостанції -їх курсових кутів,
- 14. Склад радіокомпаса Всенаправлена в горизонтальній площині антена. Направлена в горизонтальній площині рамочна антена. Приймач. Канал автоматичного
- 15. Автоматичний радіокомпас з рухомою рамкою А – всенаправлена антена π/2 – коректор фази на 900 ДР
- 16. Підсилений (П) сигнал рамки в балансному модуляторі (БМ) змінює фазу на протилежну в моменти переходу обвідної
- 17. Пара сельсін-датчик (СД) та сельсін-приймач (СП), які являються машинами змінного струму з однофазним ротором і трьохфазним
- 18. * Контроль відстані до радіостанції Контроль поточної відстані R між літаком і радіостанцією при польоті від
- 19. * Автоматичний радіокомпас з нерухомою рамкою Сигнали двохрамочної антени (РА) дистанційно в статорі гоніометра відтворюють поле
- 20. * Джерела деяких помилок пеленгації Поляризаційна помилка виникає внаслідок інтерференції прямого сигналу радіостанції з сигналом, відбитим
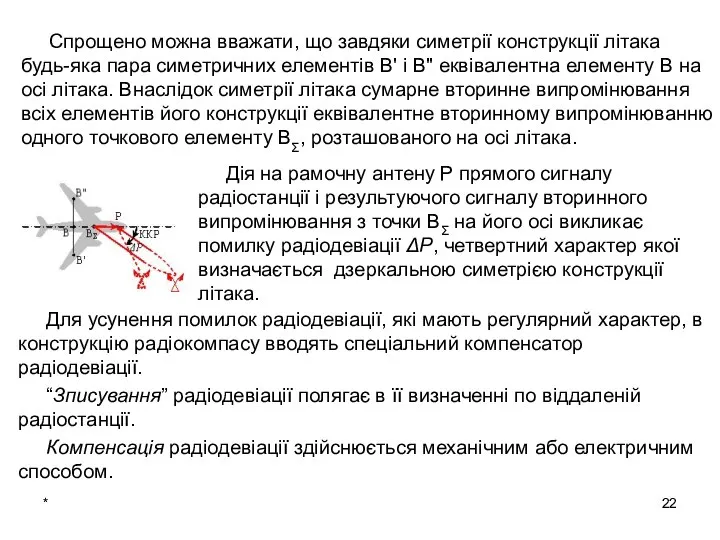
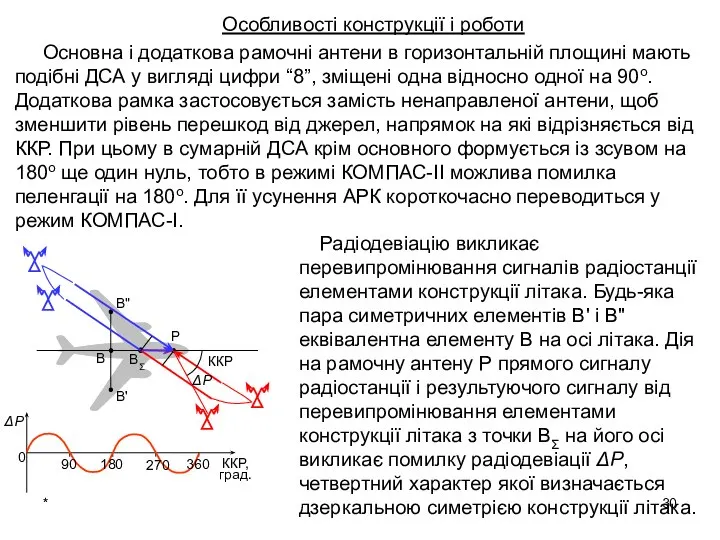
- 21. * 3. Перевипромінювання сигналів радіостанції сусідніми з рамкою об'єктами викривлює хвильовий фронт сумарного сигналу – виникає
- 22. * Спрощено можна вважати, що завдяки симетрії конструкції літака будь-яка пара симетричних елементів В' і В"
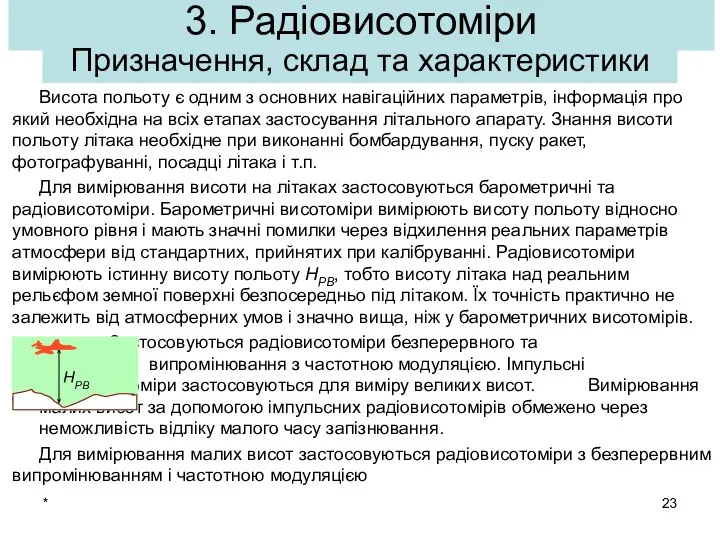
- 23. * Висота польоту є одним з основних навігаційних параметрів, інформація про який необхідна на всіх етапах
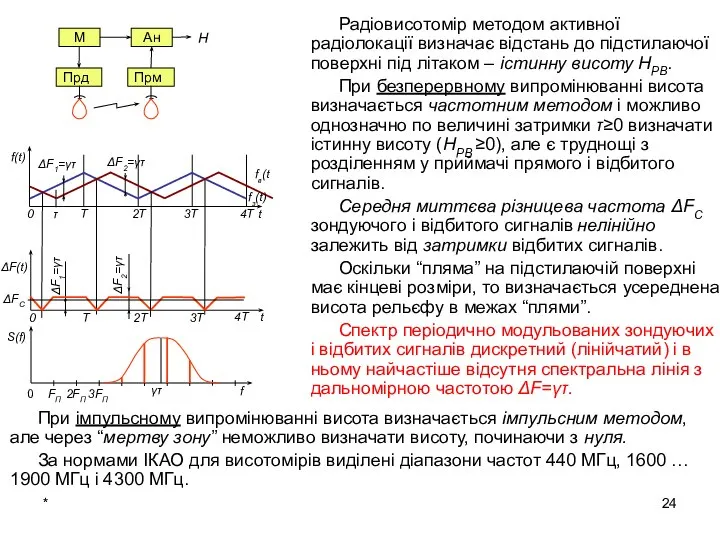
- 24. * Радіовисотомір методом активної радіолокації визначає відстань до підстилаючої поверхні під літаком – істинну висоту НРВ.
- 25. Радіовисотоміри безперервного випромінювання ГМС – генератор модулюючих сигналів ∫ - інтегратор ЧМГ - частотно модульований генератор
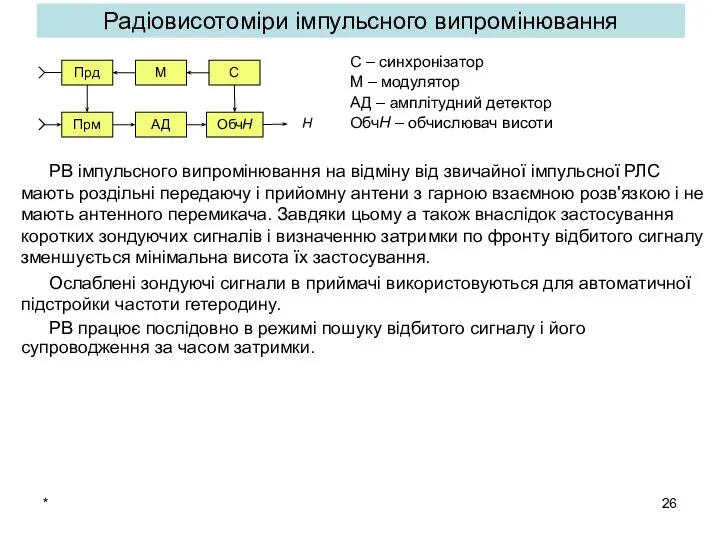
- 26. * Радіовисотоміри імпульсного випромінювання С – синхронізатор М – модулятор АД – амплітудний детектор ОбчН –
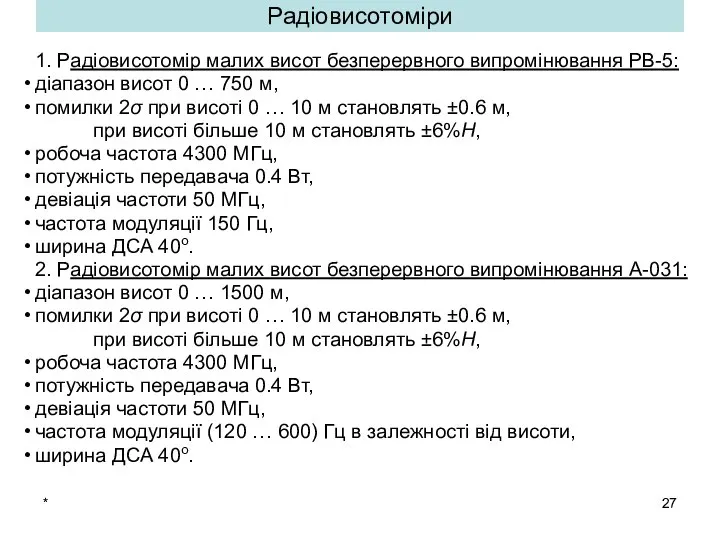
- 27. * Радіовисотоміри 1. Радіовисотомір малих висот безперервного випромінювання РВ-5: діапазон висот 0 … 750 м, помилки
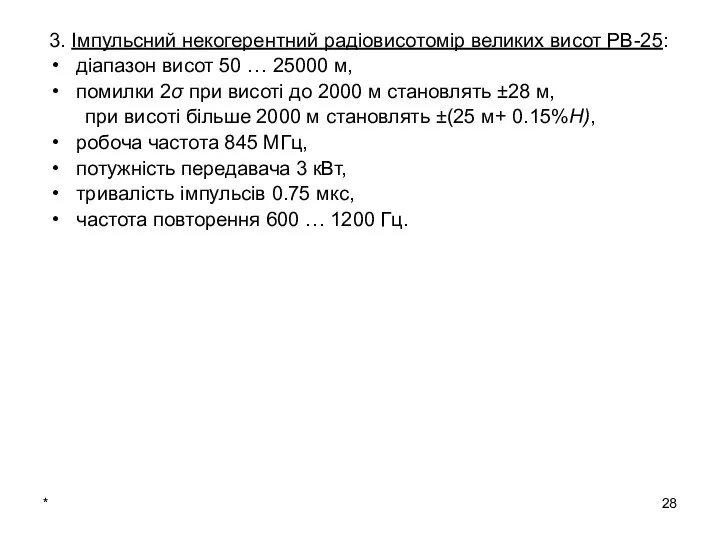
- 28. * 3. Імпульсний некогерентний радіовисотомір великих висот РВ-25: діапазон висот 50 … 25000 м, помилки 2σ
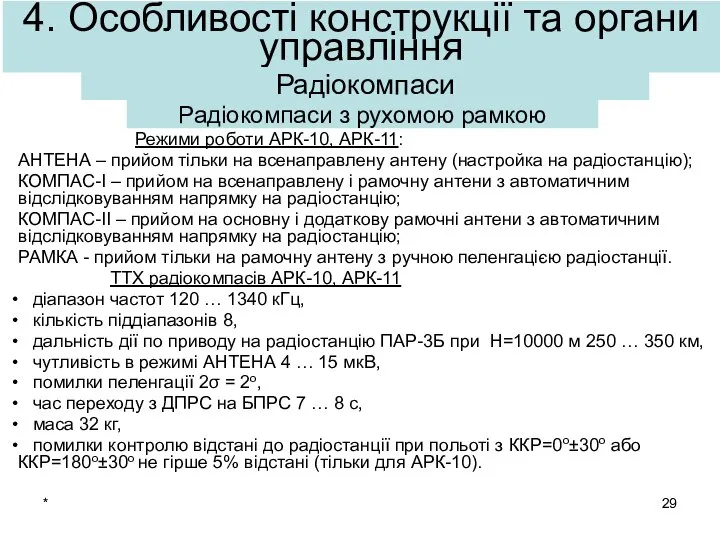
- 29. * Режими роботи АРК-10, АРК-11: АНТЕНА – прийом тільки на всенаправлену антену (настройка на радіостанцію); КОМПАС-І
- 30. * Особливості конструкції і роботи Основна і додаткова рамочні антени в горизонтальній площині мають подібні ДСА
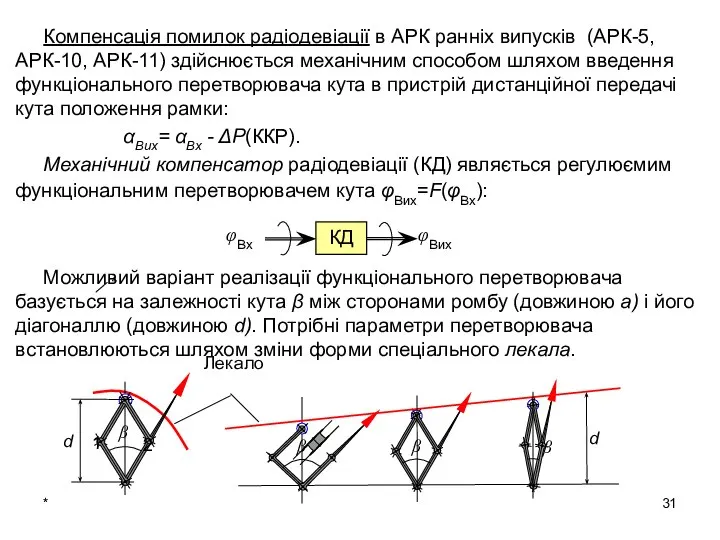
- 31. * Компенсація помилок радіодевіації в АРК ранніх випусків (АРК-5, АРК-10, АРК-11) здійснюється механічним способом шляхом введення
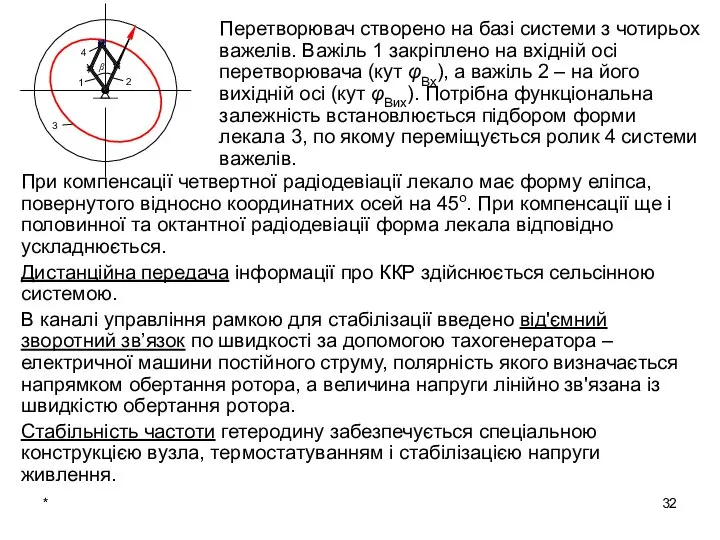
- 32. * При компенсації четвертної радіодевіації лекало має форму еліпса, повернутого відносно координатних осей на 45о. При
- 33. * Система дистанційної настройки включає дистанційний перемикач піддіапазонів і вузол дистанційної установки частоти в межах піддіапазону.
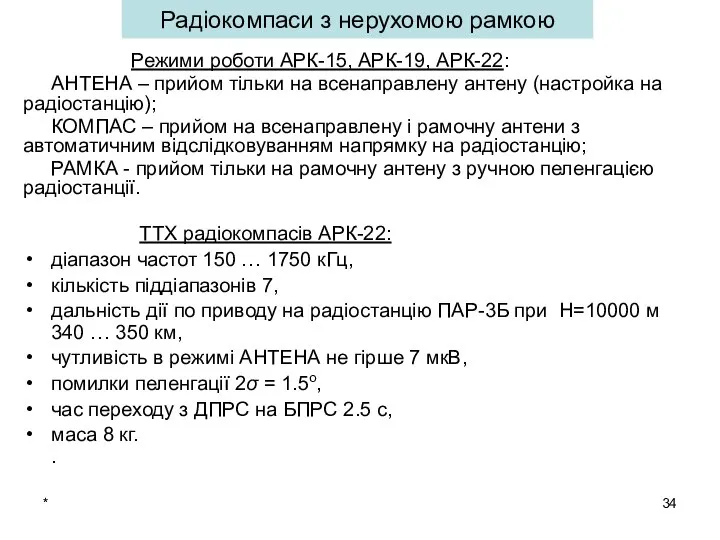
- 34. * Режими роботи АРК-15, АРК-19, АРК-22: АНТЕНА – прийом тільки на всенаправлену антену (настройка на радіостанцію);
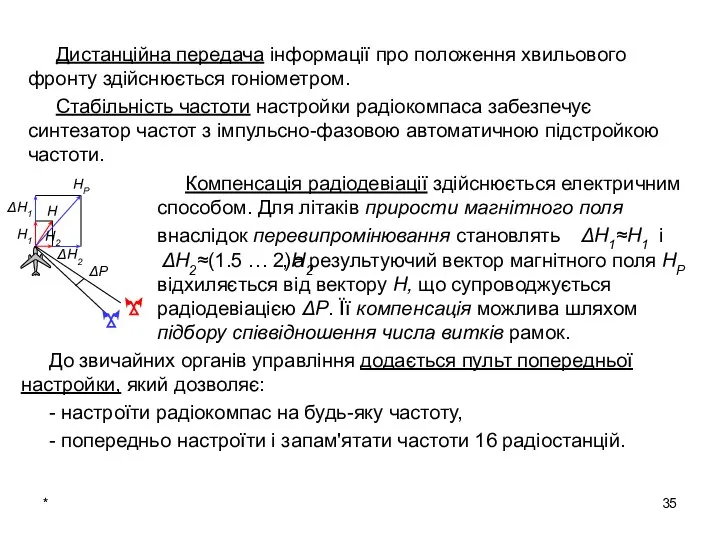
- 35. * Дистанційна передача інформації про положення хвильового фронту здійснюється гоніометром. Стабільність частоти настройки радіокомпаса забезпечує синтезатор
- 36. * В радіовисотомірах літаків 1 … 3 поколінь застосовуються ідентичні за конструкцією передаюча і прийомна антени
- 37. * Питання для самоконтролю Автоматичний радіокомпас з рухомою рамкою. Автоматичний радіокомпас з нерухомою рамкою. Радіовисотомір безперервного
- 39. Скачать презентацию
*
Загальні відомості про автономні засоби радіонавігації.
Автоматичні радіокомпаси.
Радіовисотоміри.
Особливості конструкції та органи управління
*
Загальні відомості про автономні засоби радіонавігації.
Автоматичні радіокомпаси.
Радіовисотоміри.
Особливості конструкції та органи управління
*
Контрольні завдання (АЗРН1)
Обгрунтуйте можливе місцеположення літака, якщо курсові кути двох радіостанцій
*
Контрольні завдання (АЗРН1)
Обгрунтуйте можливе місцеположення літака, якщо курсові кути двох радіостанцій
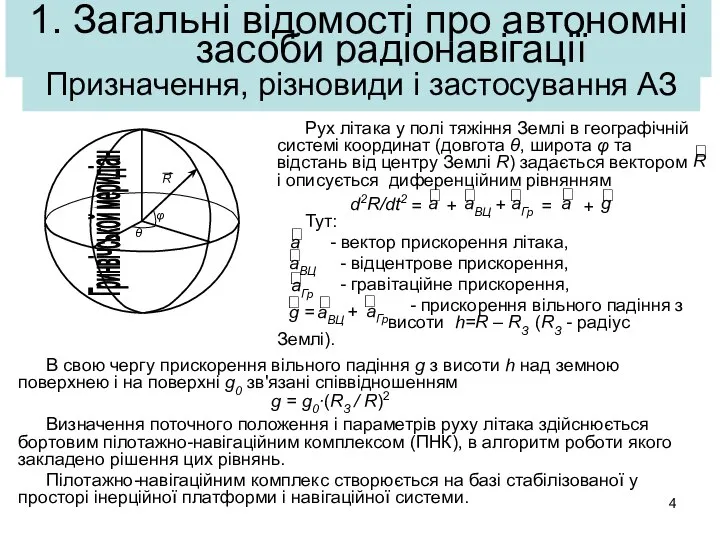
Рух літака у полі тяжіння Землі в географічній системі координат (довгота
Рух літака у полі тяжіння Землі в географічній системі координат (довгота
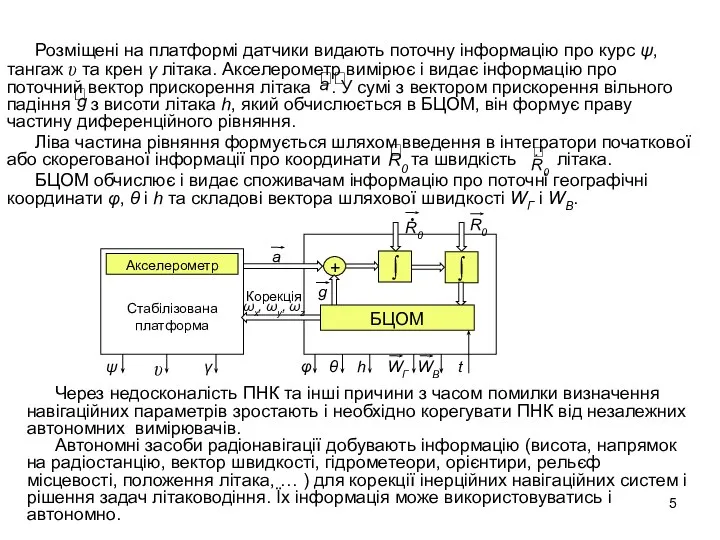
Через недосконалість ПНК та інші причини з часом помилки визначення навігаційних
Через недосконалість ПНК та інші причини з часом помилки визначення навігаційних
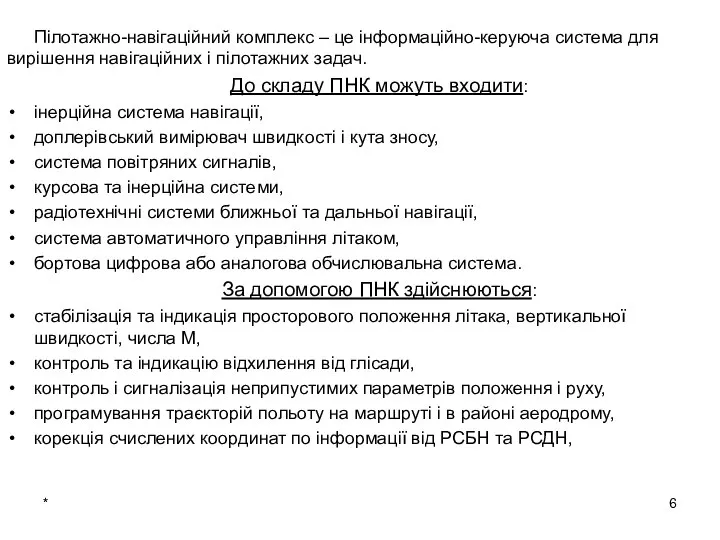
Пілотажно-навігаційний комплекс – це інформаційно-керуюча система для вирішення навігаційних і пілотажних
Пілотажно-навігаційний комплекс – це інформаційно-керуюча система для вирішення навігаційних і пілотажних
*
Автономні радіонавігаційні засоби
Автоматичний радіокомпас – визначає курсовий кут радіостанції. Застосовується:
-
*
Автономні радіонавігаційні засоби
Автоматичний радіокомпас – визначає курсовий кут радіостанції. Застосовується:
-
*
2. Радіовисотомір – визначає істинну висоту польоту НРВ – відстань від
*
2. Радіовисотомір – визначає істинну висоту польоту НРВ – відстань від
*
Доплерівський вимірювач швидкості і кута зносу – визначає вектор шляхової швидкості,
*
Доплерівський вимірювач швидкості і кута зносу – визначає вектор шляхової швидкості,
*
Радіосекстант і радіоастрокомпас – визначають місцеположення відносно астрономічних орієнтирів.
Застосовуються при
*
Радіосекстант і радіоастрокомпас – визначають місцеположення відносно астрономічних орієнтирів.
Застосовуються при
*
6. РЛС профільного польоту – визначає прогнозовану висоту прольоту над упередженими
*
6. РЛС профільного польоту – визначає прогнозовану висоту прольоту над упередженими
*
Принципи отримання радіонавігаційної інформації
Навігаційна інформація (поточні координати, параметри руху) отримується із
*
Принципи отримання радіонавігаційної інформації
Навігаційна інформація (поточні координати, параметри руху) отримується із
*
АРК – це напівавтономний бортовий амплітудний радіопеленгатор для визначення напрямку на
*
АРК – це напівавтономний бортовий амплітудний радіопеленгатор для визначення напрямку на
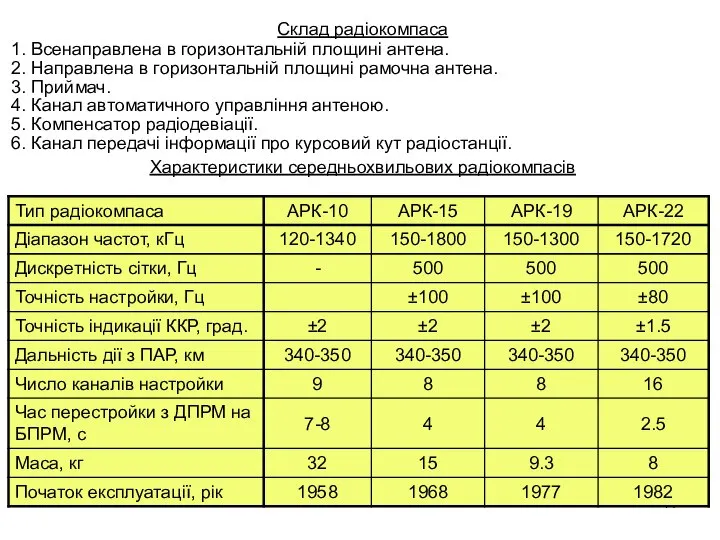
Склад радіокомпаса
Всенаправлена в горизонтальній площині антена.
Направлена в горизонтальній
Склад радіокомпаса
Всенаправлена в горизонтальній площині антена.
Направлена в горизонтальній
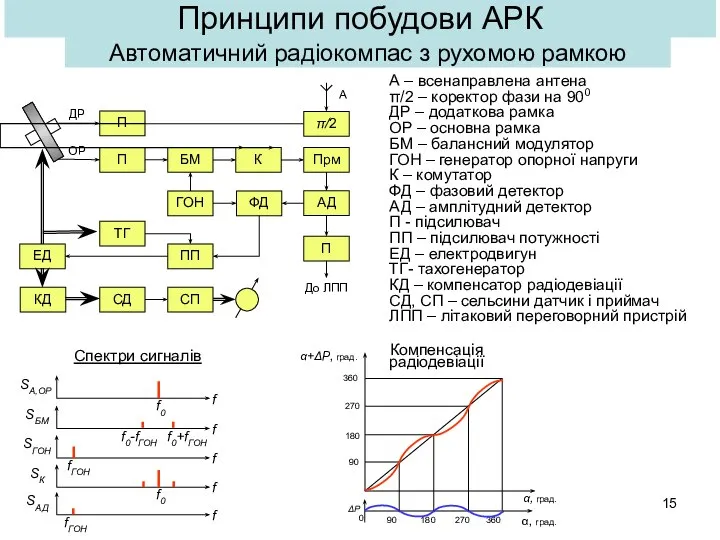
Автоматичний радіокомпас з рухомою рамкою
А – всенаправлена антена
π/2 – коректор фази
Автоматичний радіокомпас з рухомою рамкою
А – всенаправлена антена
π/2 – коректор фази
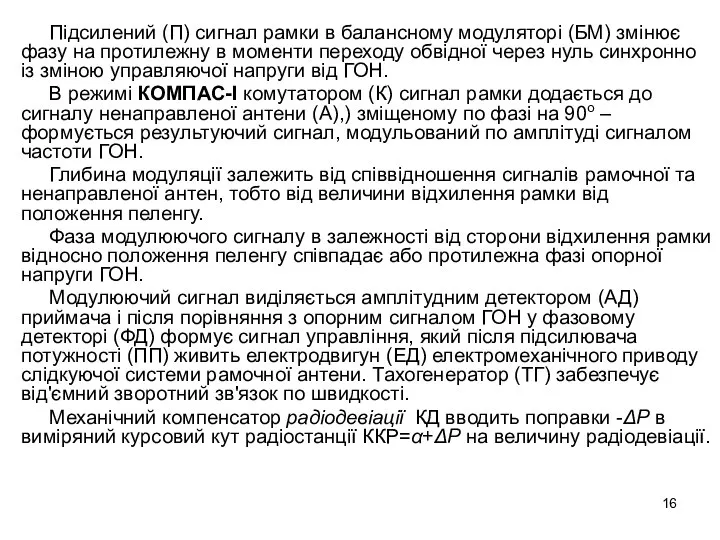
Підсилений (П) сигнал рамки в балансному модуляторі (БМ) змінює фазу на
Підсилений (П) сигнал рамки в балансному модуляторі (БМ) змінює фазу на
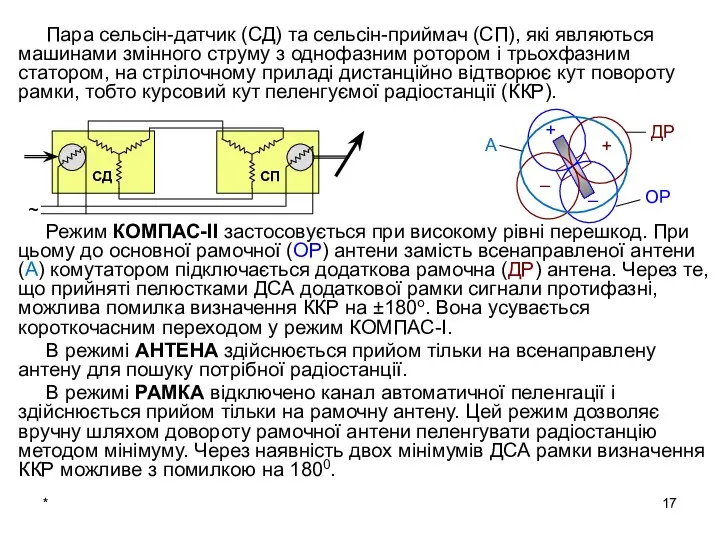
Пара сельсін-датчик (СД) та сельсін-приймач (СП), які являються машинами змінного струму
Пара сельсін-датчик (СД) та сельсін-приймач (СП), які являються машинами змінного струму
*
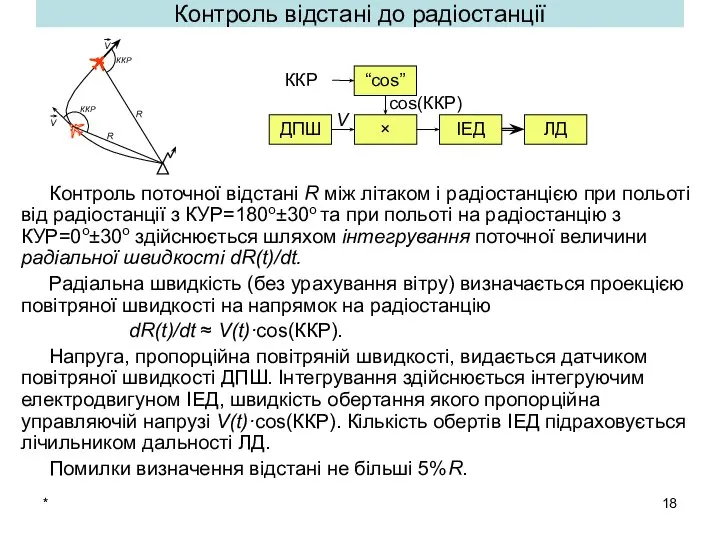
Контроль відстані до радіостанції
Контроль поточної відстані R між літаком і радіостанцією
*
Контроль відстані до радіостанції
Контроль поточної відстані R між літаком і радіостанцією
*
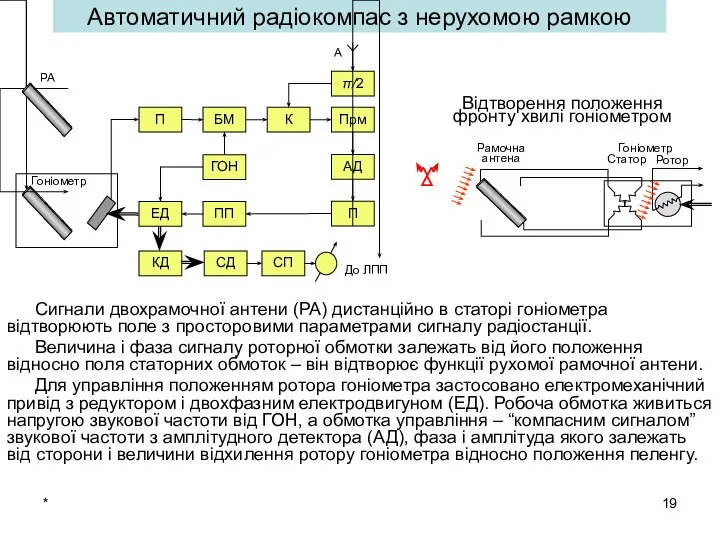
Автоматичний радіокомпас з нерухомою рамкою
Сигнали двохрамочної антени (РА) дистанційно в статорі
*
Автоматичний радіокомпас з нерухомою рамкою
Сигнали двохрамочної антени (РА) дистанційно в статорі
*
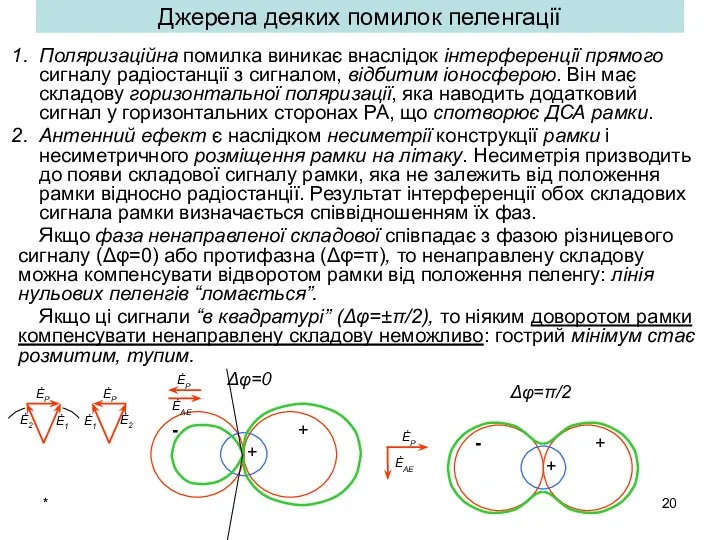
Джерела деяких помилок пеленгації
Поляризаційна помилка виникає внаслідок інтерференції прямого сигналу радіостанції
*
Джерела деяких помилок пеленгації
Поляризаційна помилка виникає внаслідок інтерференції прямого сигналу радіостанції
*
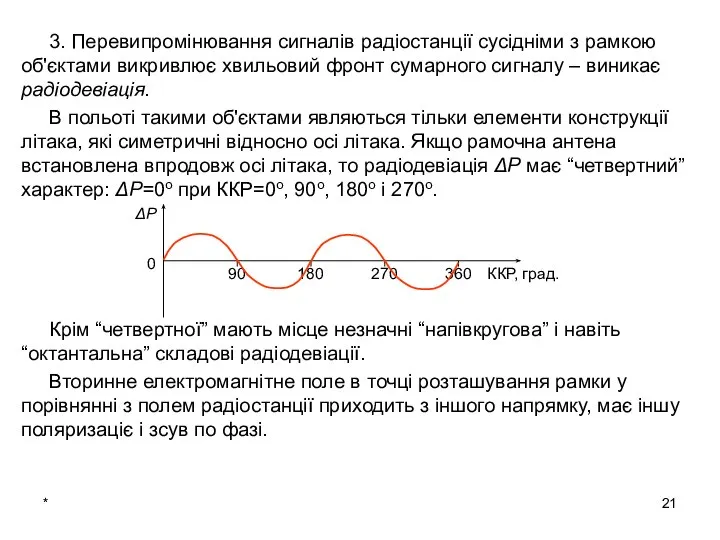
3. Перевипромінювання сигналів радіостанції сусідніми з рамкою об'єктами викривлює хвильовий фронт
*
3. Перевипромінювання сигналів радіостанції сусідніми з рамкою об'єктами викривлює хвильовий фронт
*
Спрощено можна вважати, що завдяки симетрії конструкції літака будь-яка пара симетричних
*
Спрощено можна вважати, що завдяки симетрії конструкції літака будь-яка пара симетричних
*
Висота польоту є одним з основних навігаційних параметрів, інформація про який
*
Висота польоту є одним з основних навігаційних параметрів, інформація про який
*
Радіовисотомір методом активної радіолокації визначає відстань до підстилаючої поверхні під літаком
*
Радіовисотомір методом активної радіолокації визначає відстань до підстилаючої поверхні під літаком
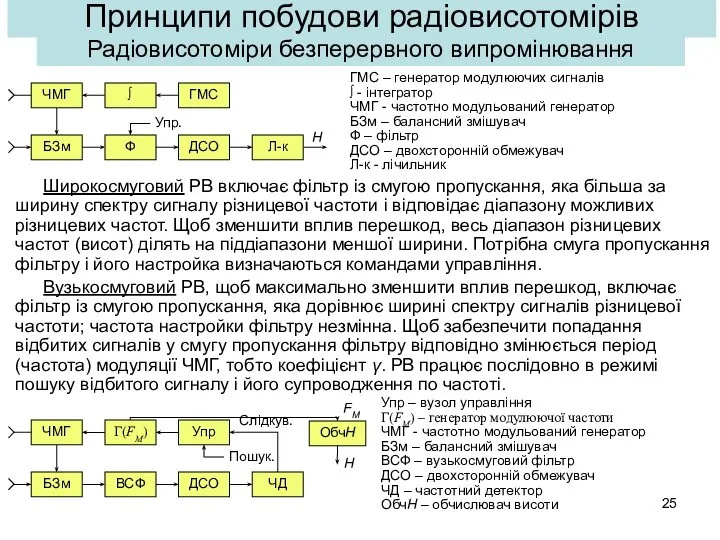
Радіовисотоміри безперервного випромінювання
ГМС – генератор модулюючих сигналів
∫ - інтегратор
ЧМГ - частотно
Радіовисотоміри безперервного випромінювання
ГМС – генератор модулюючих сигналів
∫ - інтегратор
ЧМГ - частотно
*
Радіовисотоміри імпульсного випромінювання
С – синхронізатор
М – модулятор
АД – амплітудний детектор
ОбчН –
*
Радіовисотоміри імпульсного випромінювання
С – синхронізатор
М – модулятор
АД – амплітудний детектор
ОбчН –
*
Радіовисотоміри
1. Радіовисотомір малих висот безперервного випромінювання РВ-5:
діапазон висот 0 … 750
*
Радіовисотоміри
1. Радіовисотомір малих висот безперервного випромінювання РВ-5:
діапазон висот 0 … 750
*
3. Імпульсний некогерентний радіовисотомір великих висот РВ-25:
діапазон висот 50 … 25000
*
3. Імпульсний некогерентний радіовисотомір великих висот РВ-25:
діапазон висот 50 … 25000
*
Режими роботи АРК-10, АРК-11:
АНТЕНА – прийом тільки на всенаправлену антену
*
Режими роботи АРК-10, АРК-11:
АНТЕНА – прийом тільки на всенаправлену антену
*
Особливості конструкції і роботи
Основна і додаткова рамочні антени в горизонтальній площині
*
Особливості конструкції і роботи
Основна і додаткова рамочні антени в горизонтальній площині
*
Компенсація помилок радіодевіації в АРК ранніх випусків (АРК-5, АРК-10, АРК-11) здійснюється
*
Компенсація помилок радіодевіації в АРК ранніх випусків (АРК-5, АРК-10, АРК-11) здійснюється
*
При компенсації четвертної радіодевіації лекало має форму еліпса, повернутого відносно координатних
*
При компенсації четвертної радіодевіації лекало має форму еліпса, повернутого відносно координатних
*
Система дистанційної настройки включає дистанційний перемикач піддіапазонів і вузол дистанційної установки
*
Система дистанційної настройки включає дистанційний перемикач піддіапазонів і вузол дистанційної установки
*
Режими роботи АРК-15, АРК-19, АРК-22:
АНТЕНА – прийом тільки на всенаправлену
*
Режими роботи АРК-15, АРК-19, АРК-22:
АНТЕНА – прийом тільки на всенаправлену
*
Дистанційна передача інформації про положення хвильового фронту здійснюється гоніометром.
Стабільність частоти настройки
*
Дистанційна передача інформації про положення хвильового фронту здійснюється гоніометром.
Стабільність частоти настройки
*
В радіовисотомірах літаків 1 … 3 поколінь застосовуються ідентичні за конструкцією
*
В радіовисотомірах літаків 1 … 3 поколінь застосовуються ідентичні за конструкцією
*
Питання для самоконтролю
Автоматичний радіокомпас з рухомою рамкою.
Автоматичний радіокомпас з нерухомою
*
Питання для самоконтролю
Автоматичний радіокомпас з рухомою рамкою.
Автоматичний радіокомпас з нерухомою
 Махмұт Қашқари
Махмұт Қашқари Динара 4пая1 орыс т (1)
Динара 4пая1 орыс т (1) Цели и принципы кредитно-денежной политики Подготовила студентка ФТД-4 группы Т-103 Лепичева Наталия
Цели и принципы кредитно-денежной политики Подготовила студентка ФТД-4 группы Т-103 Лепичева Наталия Sevilla
Sevilla Договор проката Подготовил: студент Группы Ю-092 Виноградская Екатерина
Договор проката Подготовил: студент Группы Ю-092 Виноградская Екатерина Презентация Авиационная промышленность. Рынок гражданской авиации
Презентация Авиационная промышленность. Рынок гражданской авиации  Планирование на предприятии
Планирование на предприятии Этические нормы СО. Выполнила:
Этические нормы СО. Выполнила: ООП. Часть 3. Полиморфизм
ООП. Часть 3. Полиморфизм Кто такие октябрята? - презентация для начальной школы_
Кто такие октябрята? - презентация для начальной школы_ Влияние питания
Влияние питания Терроризм
Терроризм Понятие абсентеизма на предприятии и способы его снижения
Понятие абсентеизма на предприятии и способы его снижения Jesus raises a widow’s son in Nain
Jesus raises a widow’s son in Nain Стартап. Мета та завдання стартапів. Відмінні особливості стартапів
Стартап. Мета та завдання стартапів. Відмінні особливості стартапів Проектное фото жилого комплекса
Проектное фото жилого комплекса Правописание ЧА – ЩА, ЧУ – ЩУ - презентация для начальной школы
Правописание ЧА – ЩА, ЧУ – ЩУ - презентация для начальной школы Регистрация юридических лиц
Регистрация юридических лиц Забойные двигатели: Типы, классификация, устройство. Монтаж и эксплуатация бурового оборудования. Лекция 4
Забойные двигатели: Типы, классификация, устройство. Монтаж и эксплуатация бурового оборудования. Лекция 4 Міжнародний тероризм
Міжнародний тероризм Записи в мові Паскаль. Множини. Оператор приєднання WITH
Записи в мові Паскаль. Множини. Оператор приєднання WITH ПРЕЗЕНТАЦИЯ набор в ВУЦ
ПРЕЗЕНТАЦИЯ набор в ВУЦ Роль развития профессионализма учителя в повышении показателей ГИА
Роль развития профессионализма учителя в повышении показателей ГИА Мониторы
Мониторы  Places of Interest in Russia
Places of Interest in Russia Финансовый контроль
Финансовый контроль Средства объектно-ориентированного программирования (Delphi / Pascal, глава 7)
Средства объектно-ориентированного программирования (Delphi / Pascal, глава 7) Понятие ЕСЭ. Принципы построения ССОП и АТС
Понятие ЕСЭ. Принципы построения ССОП и АТС