- Т19 РСП.ppt

Содержание
- 2. * Навчальна та виховна мета 1. Засвоїти принципи побудови та основи бойового застосування і технічної експлуатації
- 3. * Контрольні завдання (РСП) Інформаційне забезпечення посадки літака на аеродром, обладнаний системою ОСП (1 бал). Поясніть,
- 4. * Основні етапи: Привід у район посадки (D≈200 км). Організація повітряного руху в районі аеродрому (D≈150
- 5. * Призначення системи інструментальної посадки Задачі системи посадки: - привід літаків у район аеродрому посадки; -
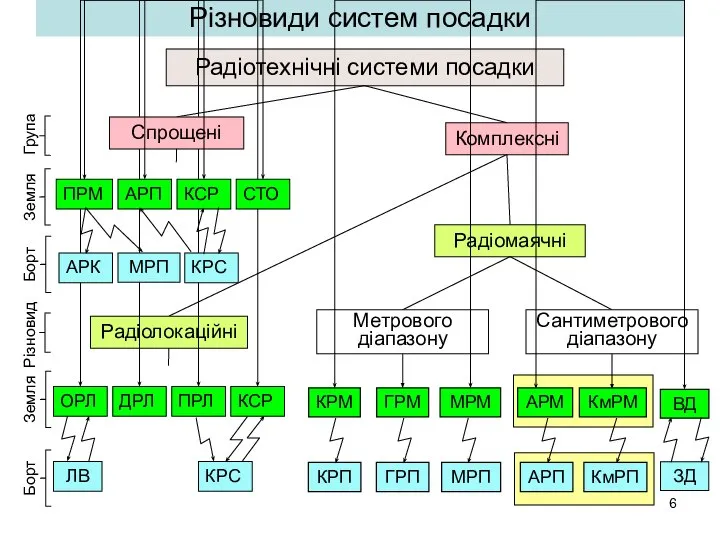
- 6. Різновиди систем посадки
- 7. Прийняті скорочення ПРМ – привідний радіомаяк (привідна радіостанція + маркерний радіомаяк), АРП – автоматичний радіопеленгатор, КСР
- 8. * Вимоги до системи посадки Загальні вимоги Висока надійність засобів забезпечення посадки. Незалежність якості інформаційного забезпечення
- 9. Призначення: - виведення літака в район аеродрому, - забезпечення заходу на посадку, - зниження, - посадка
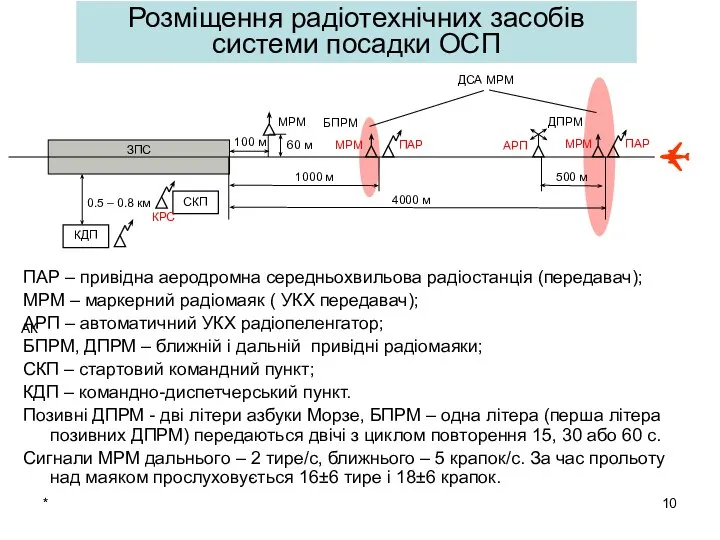
- 10. * Розміщення радіотехнічних засобів системи посадки ОСП ПАР – привідна аеродромна середньохвильова радіостанція (передавач); МРМ –
- 11. * Привідний радіомаркерний пункт Привідні радіомаркерні пункти (ДПРМ чи БПРМ, МРМ, АРП) призначені для приводу літаків
- 12. * Маркерний радіомаяк МРМ-48 Маркерні радіомаяки працюють на фіксованій частоті 75 МГц і призначені для фіксації
- 13. Автоматичний УКХ радіопеленгатор Автоматичний радіопеленгатор (АРП) забезпечує автоматичний вимір та індикацію радіопеленга об’єкту (зокрема, передавача бортової
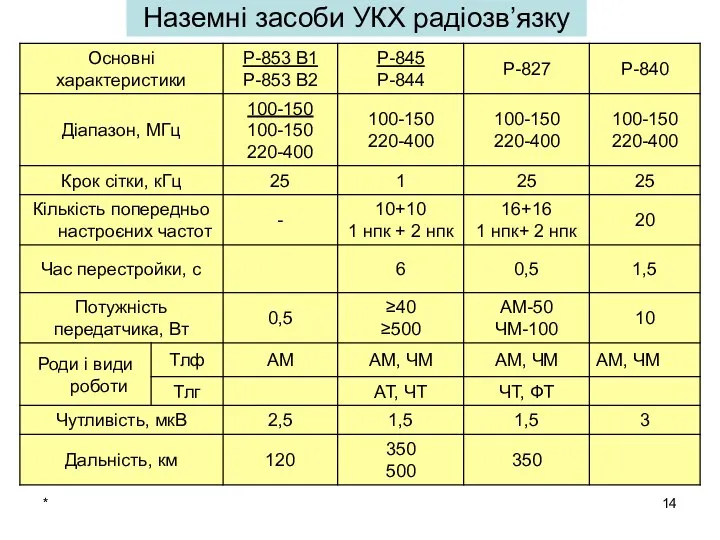
- 14. * Наземні засоби УКХ радіозв’язку
- 15. * Стартовий командний пункт Стартовий командний пункт (СКП) призначений для виконання допоміжних функцій з управління зльотом,
- 16. Командно-диспетчерський пункт Обладнання КДП 1. Засоби зв’язоку: - з КП, СКП, РСП, засобами РТЗ польотів, підрозділами
- 17. * Недоліки спрощених систем посадки Низька точність заходу і здійснення посадки (великий посадковий мінімум: видимість 500
- 18. Радіолокаційна система посадки (РСП) Призначення РСП забезпечує вирішення задач: - виявлення літаків в радіусі 80 …
- 19. * Радіолокаційні системи посадки літаків включають диспетчерське і посадкове обладнання. Звичайно радіолокаційна система посадки розгортається разом
- 20. * Розміщення засобів посадки РСП на аеродромі ПРЛ з командною радіостанцією управління літаками на гліссаді в
- 21. * Оглядовий радіолокатор Призначення ОРЛ: - контроль повітряного простору в радіусі 150 … 250 км; -
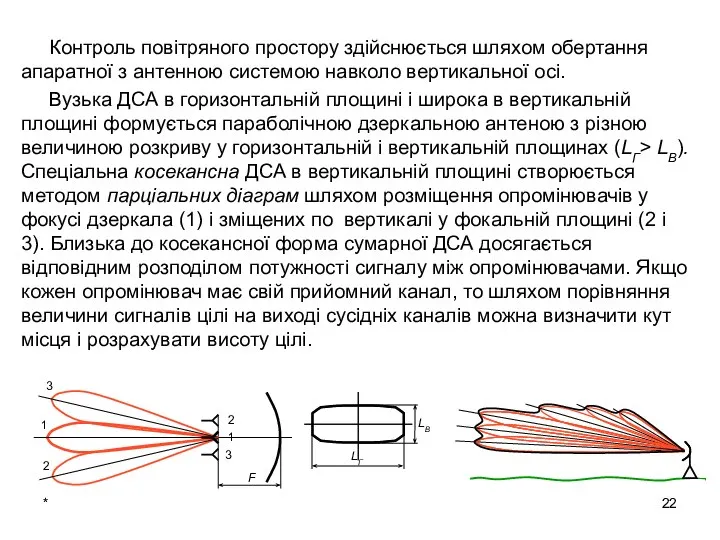
- 22. * Контроль повітряного простору здійснюється шляхом обертання апаратної з антенною системою навколо вертикальної осі. Вузька ДСА
- 23. * В режимі активної радіолокації здійснюється виявлення всіх цілей, що знаходяться в зоні дії ОРЛ, визначення
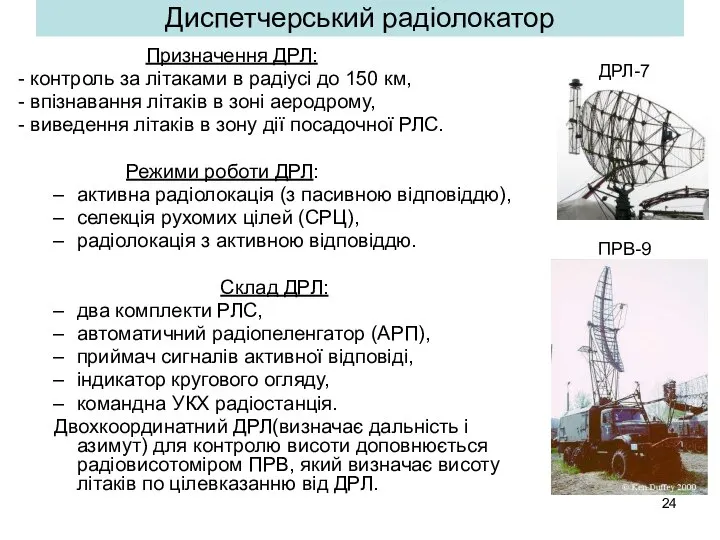
- 24. Диспетчерський радіолокатор Призначення ДРЛ: - контроль за літаками в радіусі до 150 км, - впізнавання літаків
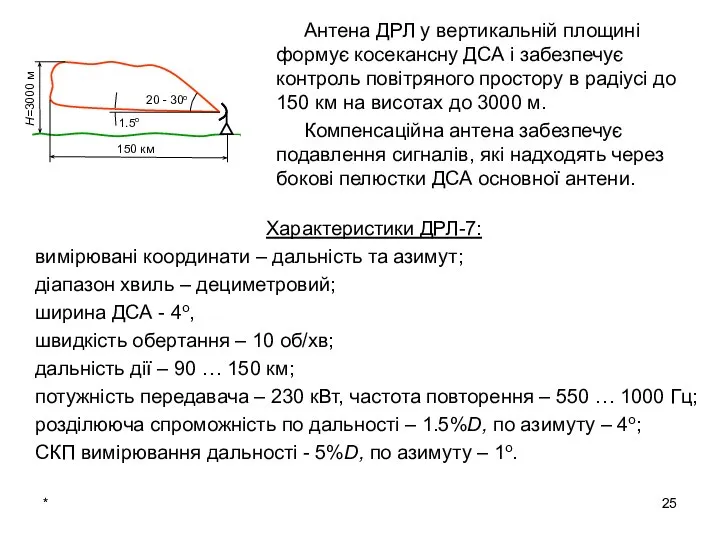
- 25. * Антена ДРЛ у вертикальній площині формує косекансну ДСА і забезпечує контроль повітряного простору в радіусі
- 26. Посадочний радіолокатор Призначення ПРЛ: - контроль положення літаків на посадочному курсі і глісаді; - контроль повітряного
- 27. ПРЛ - це двохкоординатні курсовий і глісадний радіолокатори з загальним прийомопередаючим каналом, селектором рухомих цілей (СРЦ)
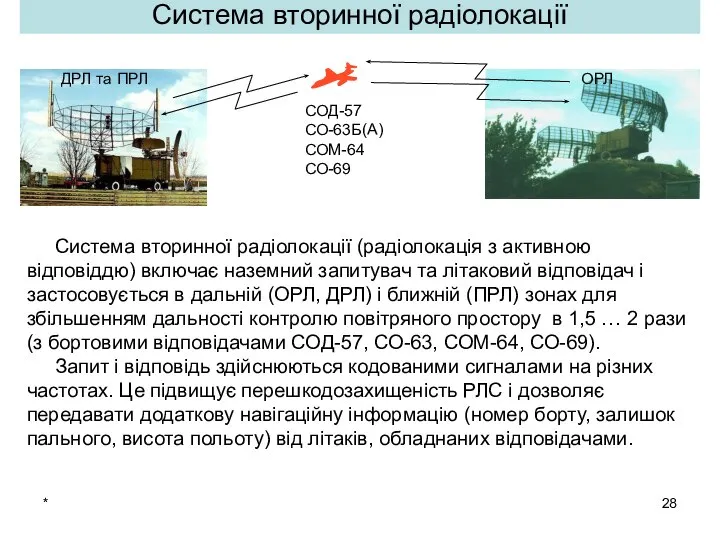
- 28. * Система вторинної радіолокації Система вторинної радіолокації (радіолокація з активною відповіддю) включає наземний запитувач та літаковий
- 29. Радіомаячні системи посадки у комплексі з ОСП призначені для забезпечення приборної посадки в складних метеоумовах (СМУ).
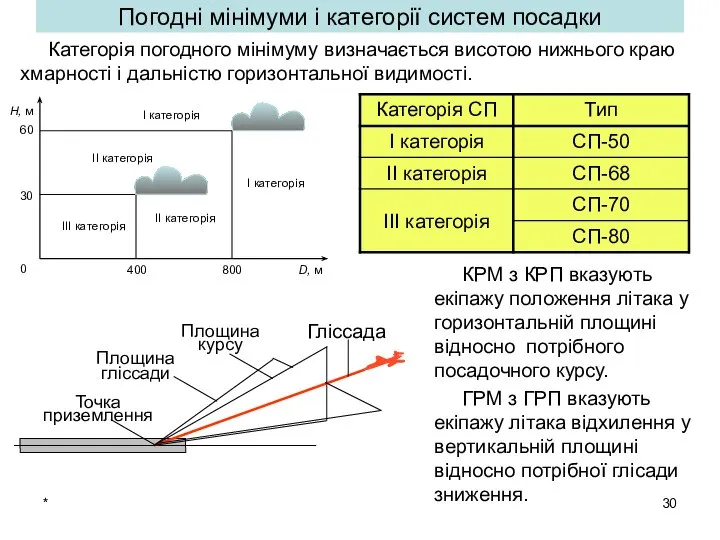
- 30. * Погодні мінімуми і категорії систем посадки КРМ з КРП вказують екіпажу положення літака у горизонтальній
- 31. * Класифікація радіомаячних систем посадки
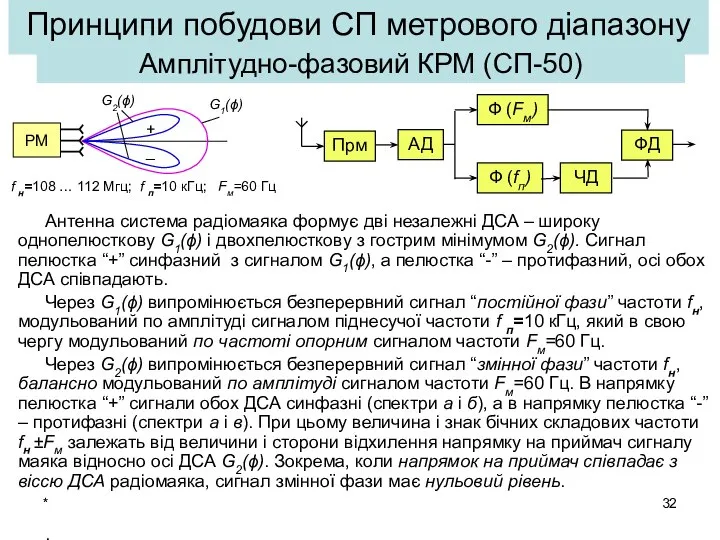
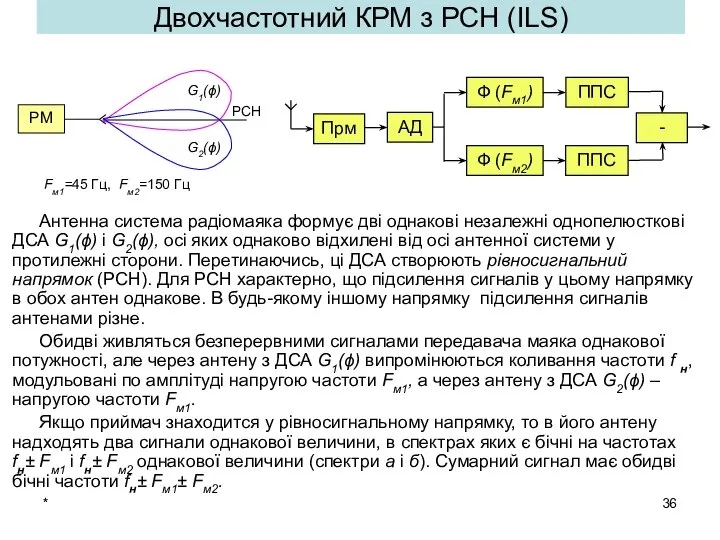
- 32. * Антенна система радіомаяка формує дві незалежні ДСА – широку однопелюсткову G1(ϕ) і двохпелюсткову з гострим
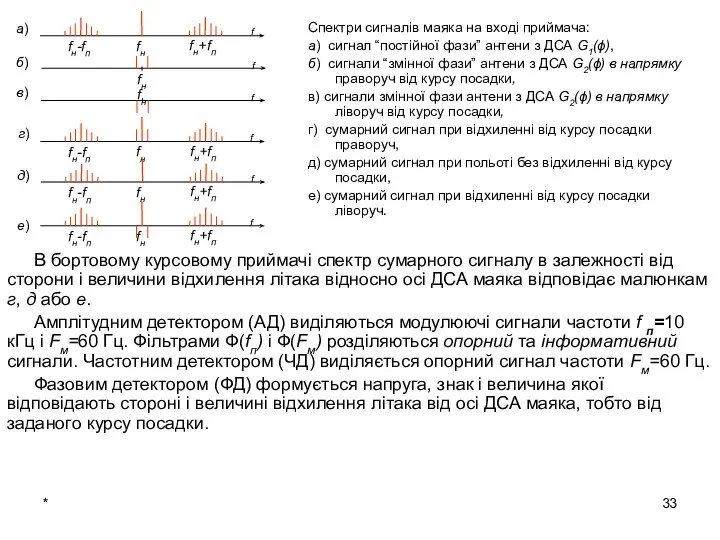
- 33. * В бортовому курсовому приймачі спектр сумарного сигналу в залежності від сторони і величини відхилення літака
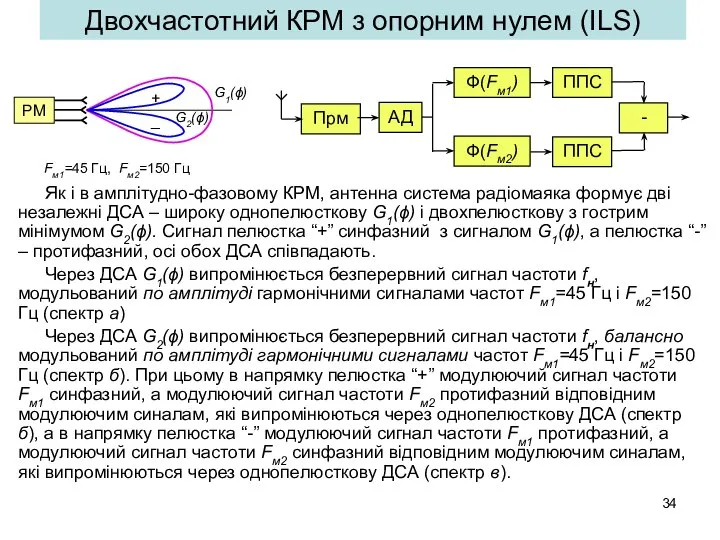
- 34. Двохчастотний КРМ з опорним нулем (ILS) Як і в амплітудно-фазовому КРМ, антенна система радіомаяка формує дві
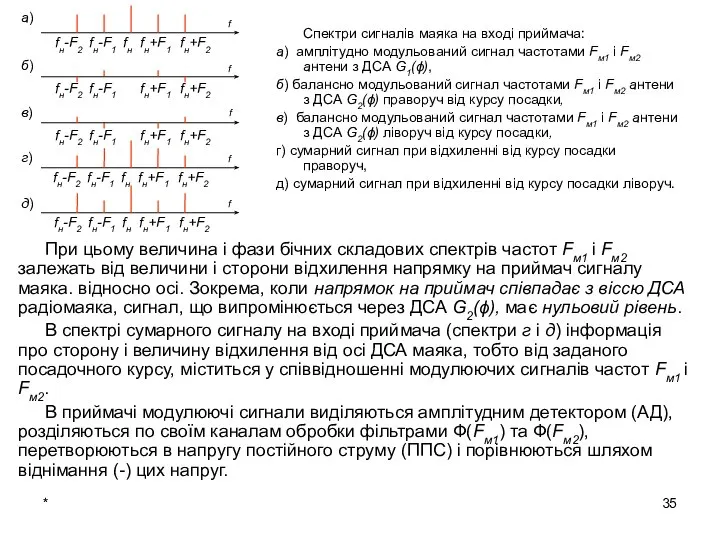
- 35. * Спектри сигналів маяка на вході приймача: а) амплітудно модульований сигнал частотами Fм1 і Fм2 антени
- 36. * Двохчастотний КРМ з РСН (ILS) Fм1=45 Гц, Fм2=150 Гц Антенна система радіомаяка формує дві однакові
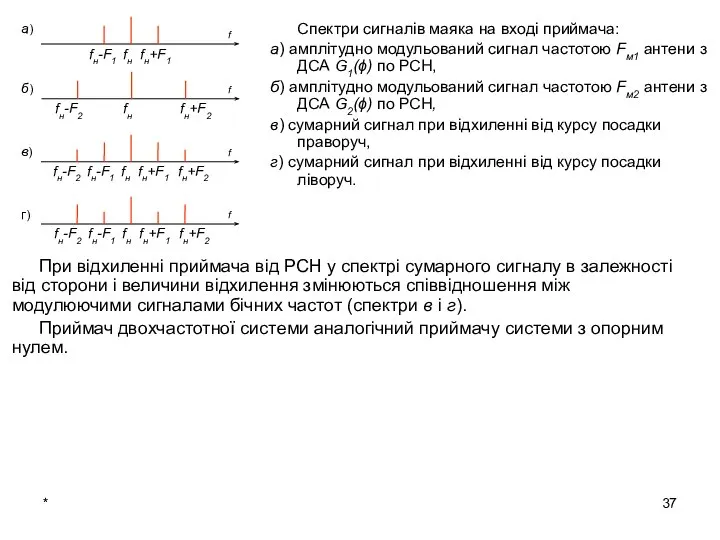
- 37. * Спектри сигналів маяка на вході приймача: а) амплітудно модульований сигнал частотою Fм1 антени з ДСА
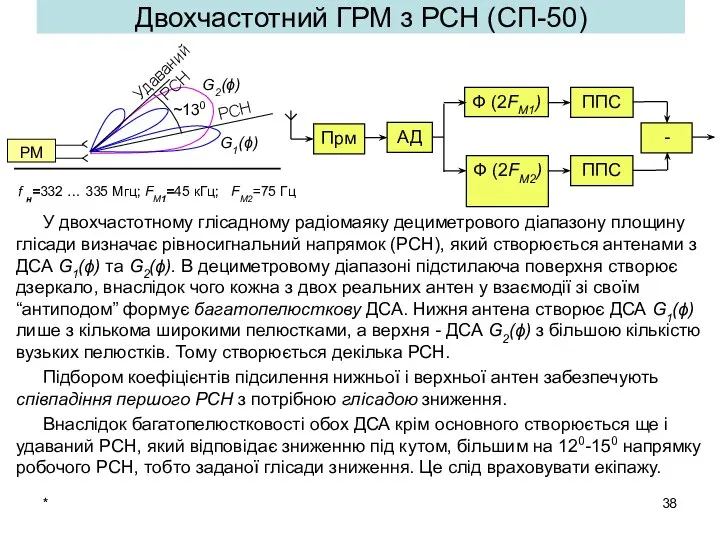
- 38. * Двохчастотний ГРМ з РСН (СП-50) У двохчастотному глісадному радіомаяку дециметрового діапазону площину глісади визначає рівносигнальний
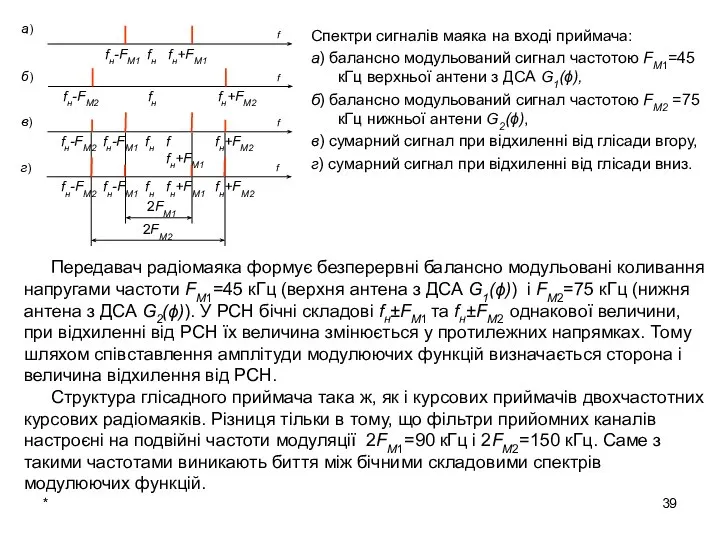
- 39. * Спектри сигналів маяка на вході приймача: а) балансно модульований сигнал частотою FМ1=45 кГц верхньої антени
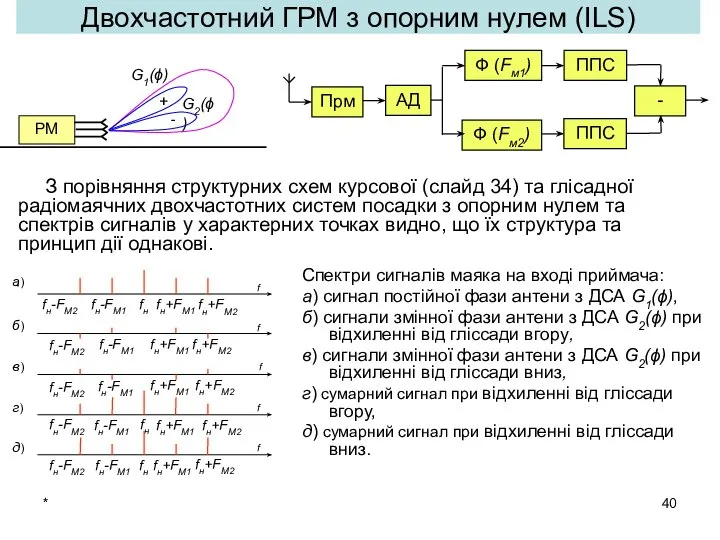
- 40. Двохчастотний ГРМ з опорним нулем (ILS) Спектри сигналів маяка на вході приймача: а) сигнал постійної фази
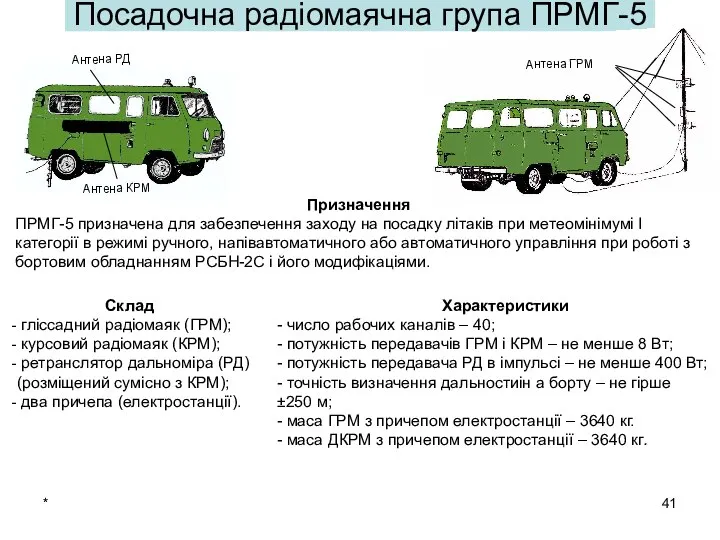
- 41. * Призначення ПРМГ-5 призначена для забезпечення заходу на посадку літаків при метеомінімумі І категорії в режимі
- 42. * Канал посадки вітчизняних РСБН призначений для визначення відхилення літака по курсу і глісаді від заданої
- 43. В бортовій апаратурі загальний високочастотний тракт (ВЧТ). Подальша обробка сигналів КРМ і ГРМ здійснюється в каналах
- 44. * Недоліки радіомаячних систем посадки метрового діапазону В УКХ діапазоні радіохвиль зони глісади і курсу систем
- 45. 3. Радіомаячні системи посадки сантиметрового діапазону Система посадки MLS забезпечує: видачу інформації про відхилення від обраної
- 46. Загальна характеристика 1. Системи посадки (СП) сантиметрового діапазону у порівнянні з СП метрового діапазону: мають значно
- 47. * Кутомірна підсистема Кутомірна підсистема працює в сантиметровому діапазоні хвиль fн=5031 ... 5091 МГц і має
- 48. * Дальномірна підсистема Дальномірна підсистема працює в діапазоні fн=960 … 1215 МГц, має 238 частотних каналів
- 49. * Бортове обладнання кожного з літаків, що здійснюють посадку, визначає відхилення по курсу Δφ = φ
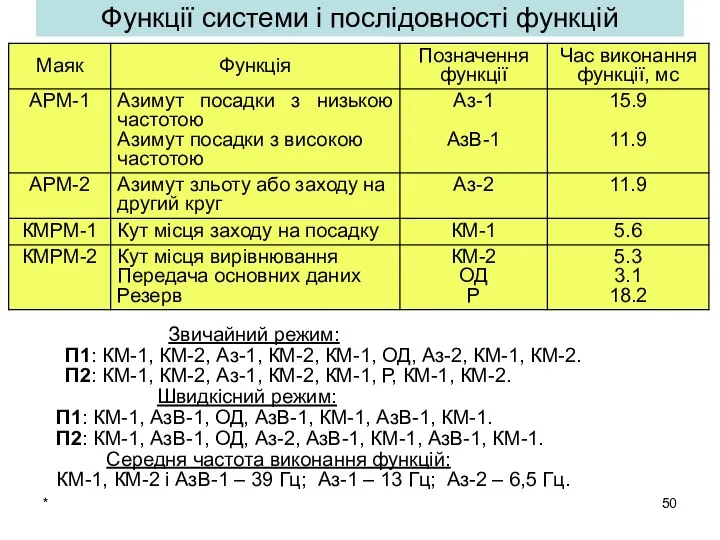
- 50. * Функції системи і послідовності функцій Звичайний режим: П1: КМ-1, КМ-2, Аз-1, КМ-2, КМ-1, ОД, Аз-2,
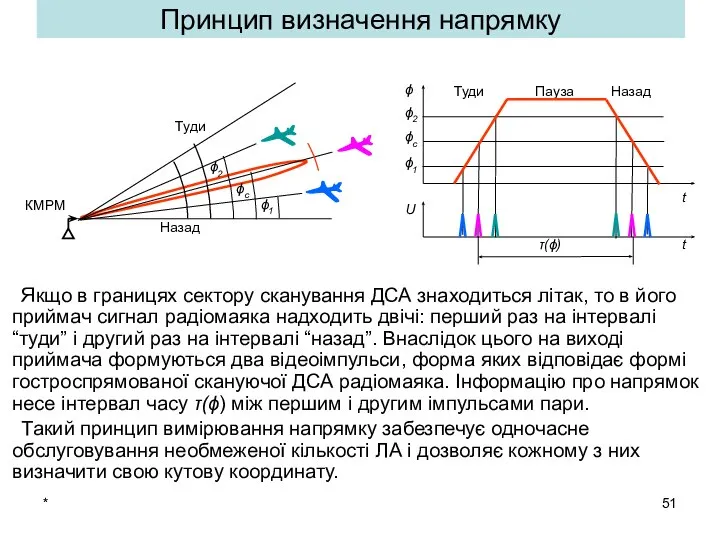
- 51. * Принцип визначення напрямку Якщо в границях сектору сканування ДСА знаходиться літак, то в його приймач
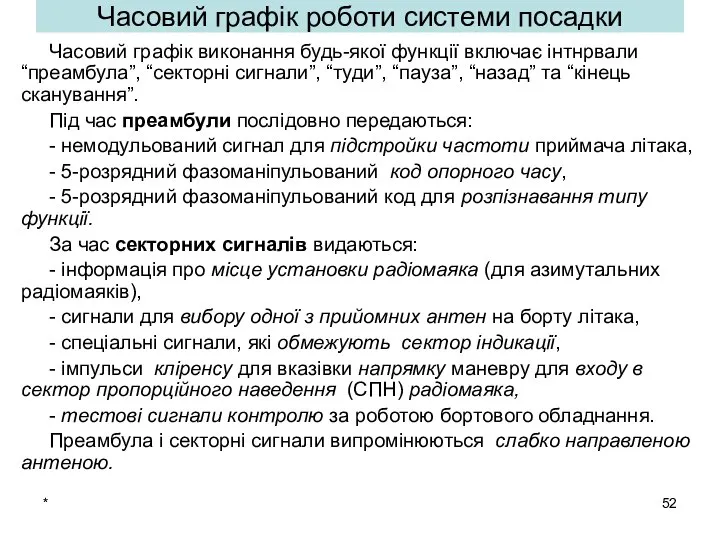
- 52. * Часовий графік роботи системи посадки Часовий графік виконання будь-якої функції включає інтнрвали “преамбула”, “секторні сигнали”,
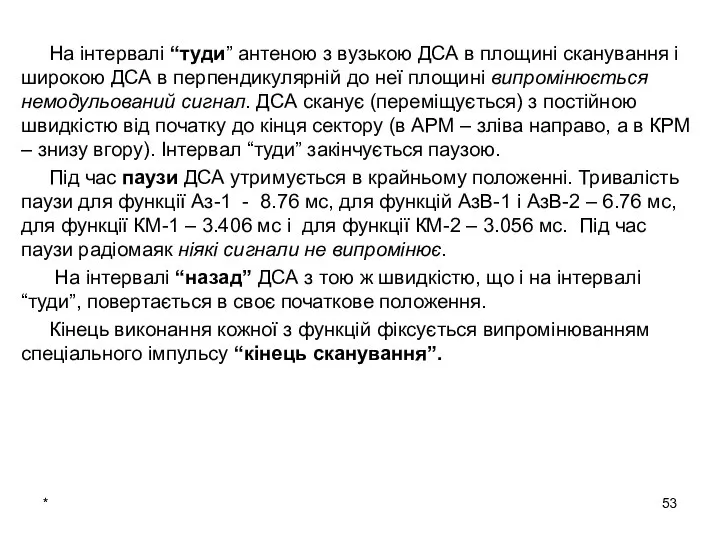
- 53. * На інтервалі “туди” антеною з вузькою ДСА в площині сканування і широкою ДСА в перпендикулярній
- 54. * Порівняльні характеристики радіомаячних систем посадки
- 55. * 4. Застосування радіотехнічних систем посадки Радіолокаційні системи посадки літаків включають диспетчерське і посадкове обладнання. Звичайно
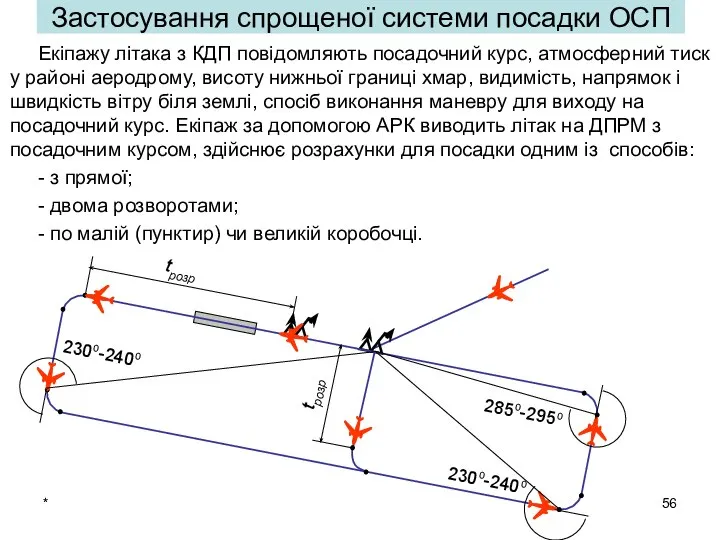
- 56. * Екіпажу літака з КДП повідомляють посадочний курс, атмосферний тиск у районі аеродрому, висоту нижньої границі
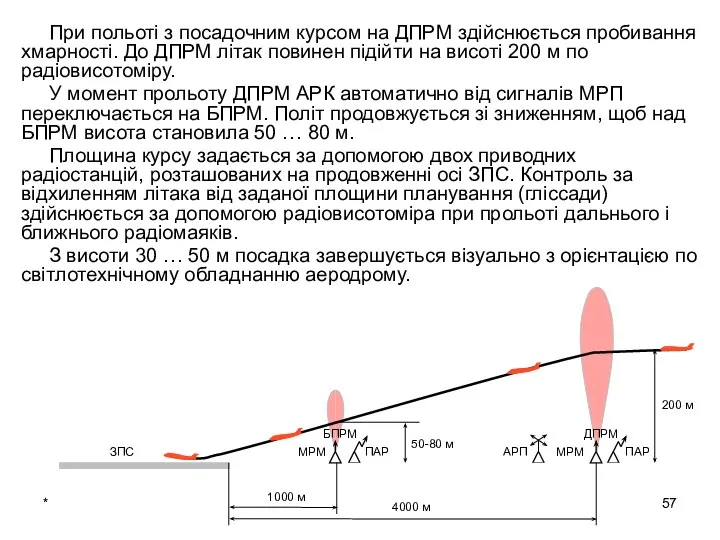
- 57. * При польоті з посадочним курсом на ДПРМ здійснюється пробивання хмарності. До ДПРМ літак повинен підійти
- 58. * Застосування РСП Виведення літаків в район аеродрому посадки в дальній зоні здійснюється за допомогою ОРЛ
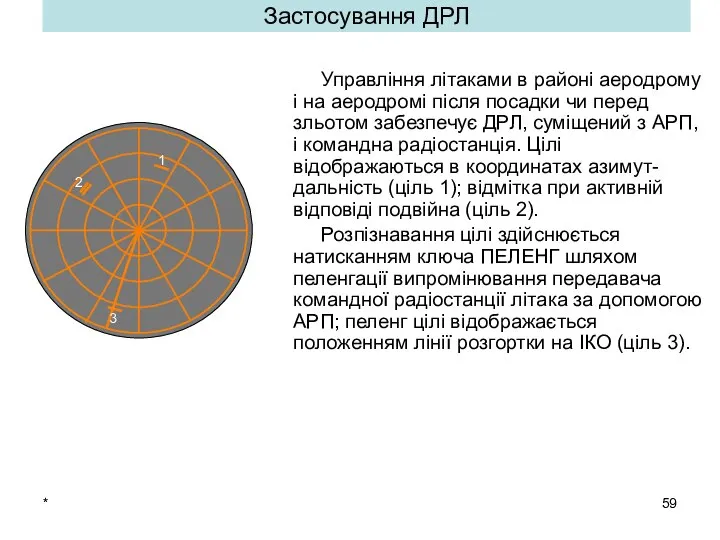
- 59. * Управління літаками в районі аеродрому і на аеродромі після посадки чи перед зльотом забезпечує ДРЛ,
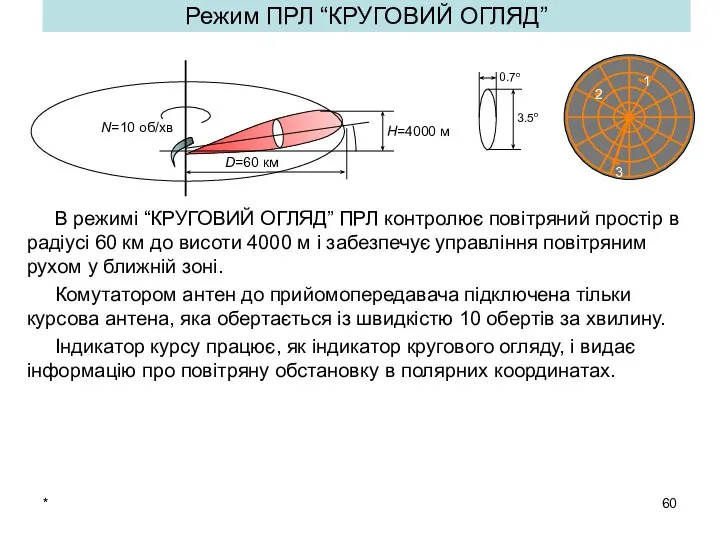
- 60. * Режим ПРЛ “КРУГОВИЙ ОГЛЯД” В режимі “КРУГОВИЙ ОГЛЯД” ПРЛ контролює повітряний простір в радіусі 60
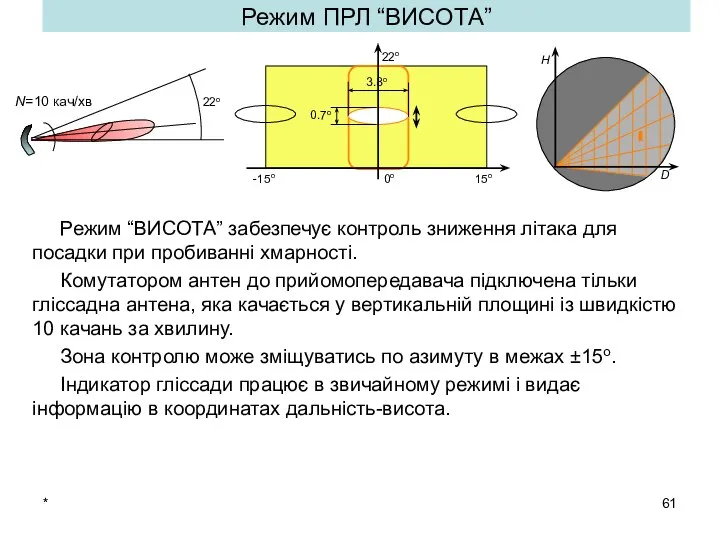
- 61. * Режим ПРЛ “ВИСОТА” Режим “ВИСОТА” забезпечує контроль зниження літака для посадки при пробиванні хмарності. Комутатором
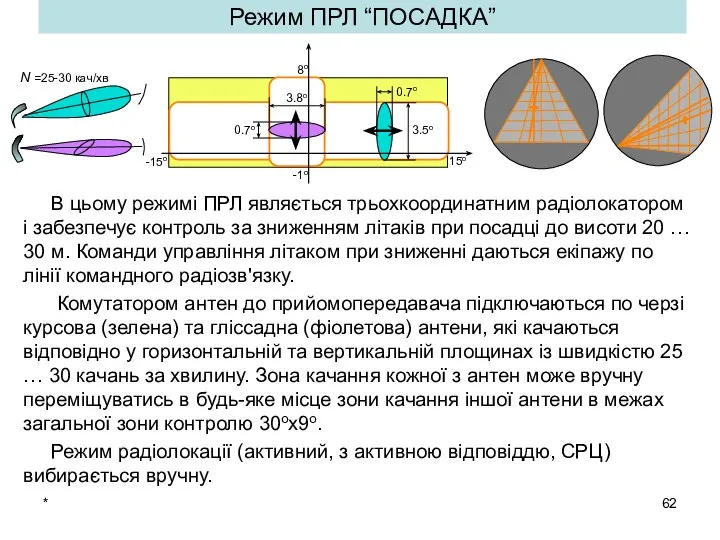
- 62. * Режим ПРЛ “ПОСАДКА” В цьому режимі ПРЛ являється трьохкоординатним радіолокатором і забезпечує контроль за зниженням
- 63. * Виведення літака в район аеродрому і захід на посадку здійснюються з використанням засобів ОСП, ОРЛ
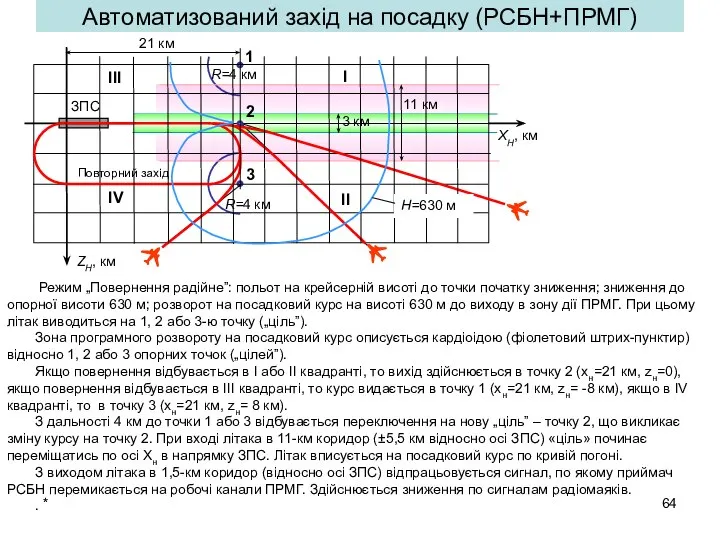
- 64. * Автоматизований захід на посадку (РСБН+ПРМГ) Режим „Повернення радійне”: польот на крейсерній висоті до точки початку
- 65. * Питання для самоконтролю Спрощена система посадки ОСП. Радіолокаційна система посадки. Радіомаячна система посадки метрового діапазону
- 67. Скачать презентацию
*
Навчальна та виховна мета
1. Засвоїти принципи побудови та основи бойового застосування
*
Навчальна та виховна мета
1. Засвоїти принципи побудови та основи бойового застосування
*
Контрольні завдання (РСП)
Інформаційне забезпечення посадки літака на аеродром, обладнаний системою ОСП
*
Контрольні завдання (РСП)
Інформаційне забезпечення посадки літака на аеродром, обладнаний системою ОСП
*
Основні етапи:
Привід у район посадки (D≈200 км).
Організація повітряного руху в районі
*
Основні етапи:
Привід у район посадки (D≈200 км).
Організація повітряного руху в районі
*
Призначення системи інструментальної посадки
Задачі системи посадки:
- привід літаків у район
*
Призначення системи інструментальної посадки
Задачі системи посадки:
- привід літаків у район
Різновиди систем посадки
Різновиди систем посадки
Прийняті скорочення
ПРМ – привідний радіомаяк (привідна радіостанція + маркерний радіомаяк),
АРП –
Прийняті скорочення
ПРМ – привідний радіомаяк (привідна радіостанція + маркерний радіомаяк),
АРП –
*
Вимоги до системи посадки
Загальні вимоги
Висока надійність засобів забезпечення посадки.
Незалежність якості інформаційного
*
Вимоги до системи посадки
Загальні вимоги
Висока надійність засобів забезпечення посадки.
Незалежність якості інформаційного
Призначення:
- виведення літака в район аеродрому,
- забезпечення заходу на посадку,
-
Призначення: - виведення літака в район аеродрому, - забезпечення заходу на посадку, -
*
Розміщення радіотехнічних засобів системи посадки ОСП
ПАР – привідна аеродромна середньохвильова радіостанція
*
Розміщення радіотехнічних засобів системи посадки ОСП
ПАР – привідна аеродромна середньохвильова радіостанція
*
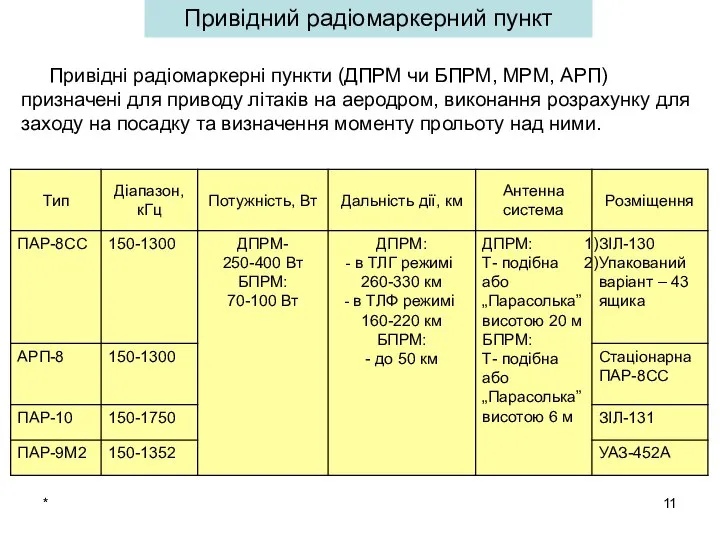
Привідний радіомаркерний пункт
Привідні радіомаркерні пункти (ДПРМ чи БПРМ, МРМ, АРП) призначені
*
Привідний радіомаркерний пункт
Привідні радіомаркерні пункти (ДПРМ чи БПРМ, МРМ, АРП) призначені
*
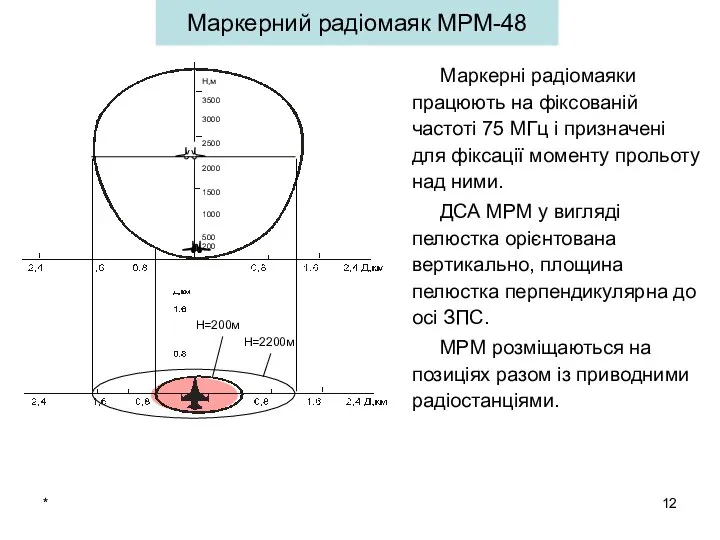
Маркерний радіомаяк МРМ-48
Маркерні радіомаяки працюють на фіксованій частоті 75 МГц і
*
Маркерний радіомаяк МРМ-48
Маркерні радіомаяки працюють на фіксованій частоті 75 МГц і
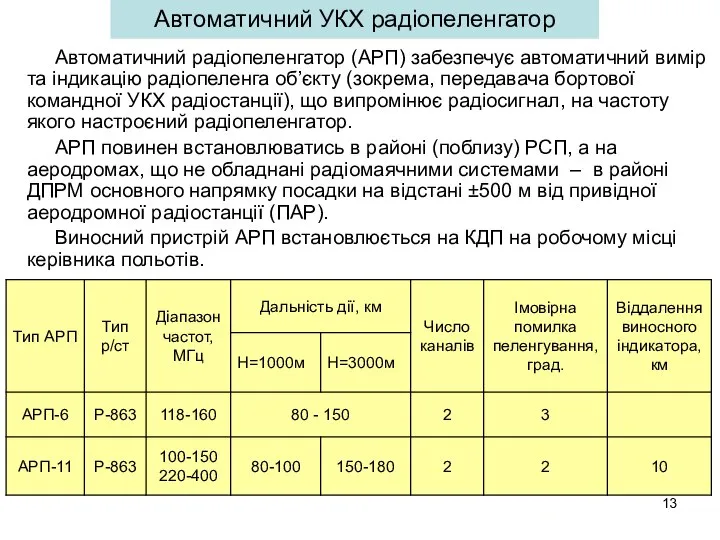
Автоматичний УКХ радіопеленгатор
Автоматичний радіопеленгатор (АРП) забезпечує автоматичний вимір та індикацію радіопеленга
Автоматичний УКХ радіопеленгатор
Автоматичний радіопеленгатор (АРП) забезпечує автоматичний вимір та індикацію радіопеленга
*
Наземні засоби УКХ радіозв’язку
*
Наземні засоби УКХ радіозв’язку
*
Стартовий командний пункт
Стартовий командний пункт (СКП) призначений для виконання допоміжних функцій
*
Стартовий командний пункт
Стартовий командний пункт (СКП) призначений для виконання допоміжних функцій
Командно-диспетчерський пункт
Обладнання КДП
1. Засоби зв’язоку:
- з КП, СКП, РСП, засобами РТЗ
Командно-диспетчерський пункт
Обладнання КДП
1. Засоби зв’язоку:
- з КП, СКП, РСП, засобами РТЗ
*
Недоліки спрощених систем посадки
Низька точність заходу і здійснення посадки (великий посадковий
*
Недоліки спрощених систем посадки
Низька точність заходу і здійснення посадки (великий посадковий
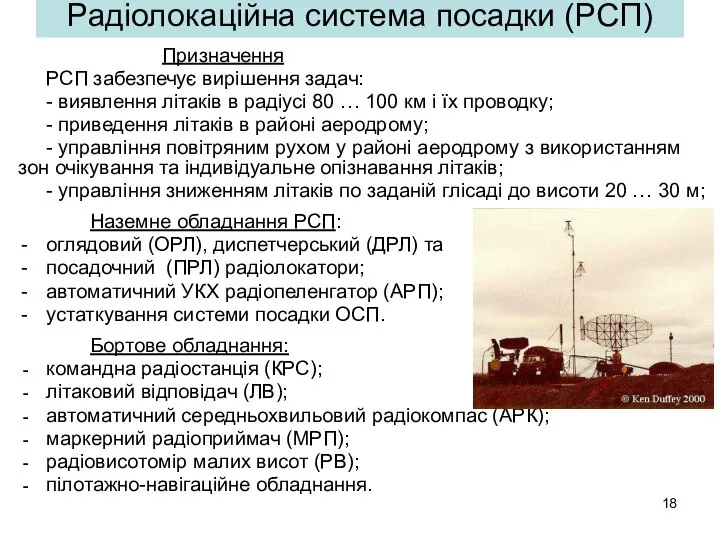
Радіолокаційна система посадки (РСП)
Призначення
РСП забезпечує вирішення задач:
- виявлення літаків в радіусі
Радіолокаційна система посадки (РСП)
Призначення
РСП забезпечує вирішення задач:
- виявлення літаків в радіусі
*
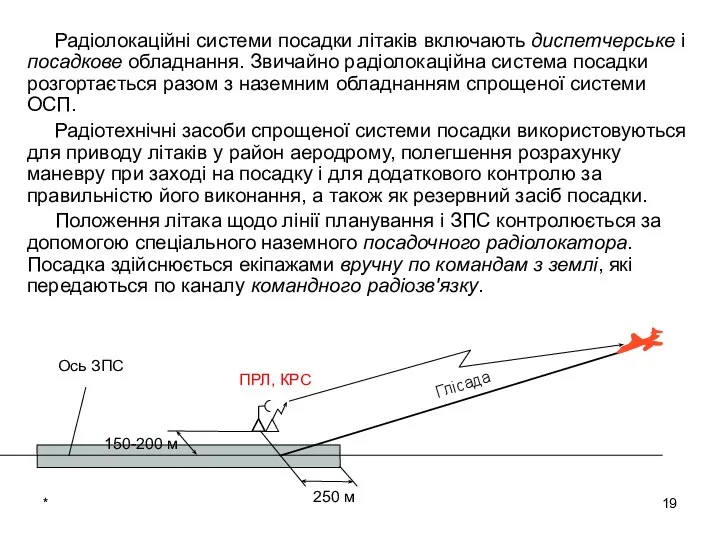
Радіолокаційні системи посадки літаків включають диспетчерське і посадкове обладнання. Звичайно радіолокаційна
*
Радіолокаційні системи посадки літаків включають диспетчерське і посадкове обладнання. Звичайно радіолокаційна
*
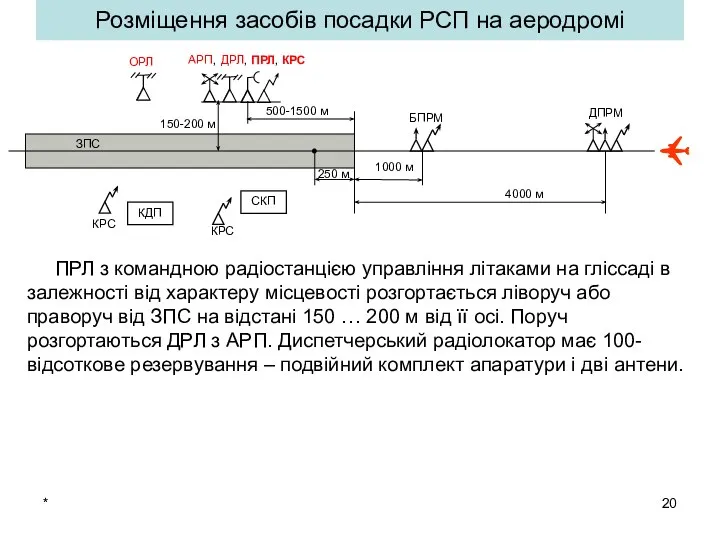
Розміщення засобів посадки РСП на аеродромі
ПРЛ з командною радіостанцією управління літаками
*
Розміщення засобів посадки РСП на аеродромі
ПРЛ з командною радіостанцією управління літаками
*
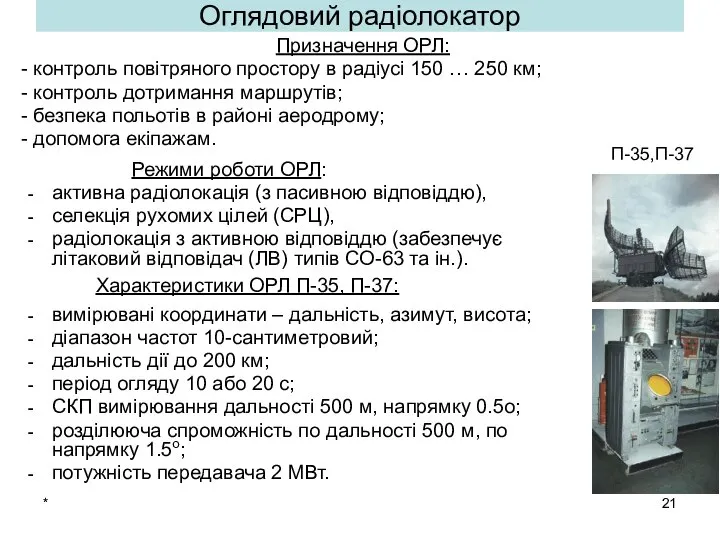
Оглядовий радіолокатор
Призначення ОРЛ:
- контроль повітряного простору в радіусі 150 … 250
*
Оглядовий радіолокатор
Призначення ОРЛ:
- контроль повітряного простору в радіусі 150 … 250
*
Контроль повітряного простору здійснюється шляхом обертання апаратної з антенною системою навколо
*
Контроль повітряного простору здійснюється шляхом обертання апаратної з антенною системою навколо
*
В режимі активної радіолокації здійснюється виявлення всіх цілей, що знаходяться в
*
В режимі активної радіолокації здійснюється виявлення всіх цілей, що знаходяться в
Диспетчерський радіолокатор
Призначення ДРЛ:
- контроль за літаками в радіусі до 150
Диспетчерський радіолокатор
Призначення ДРЛ:
- контроль за літаками в радіусі до 150
*
Антена ДРЛ у вертикальній площині формує косекансну ДСА і забезпечує контроль
*
Антена ДРЛ у вертикальній площині формує косекансну ДСА і забезпечує контроль
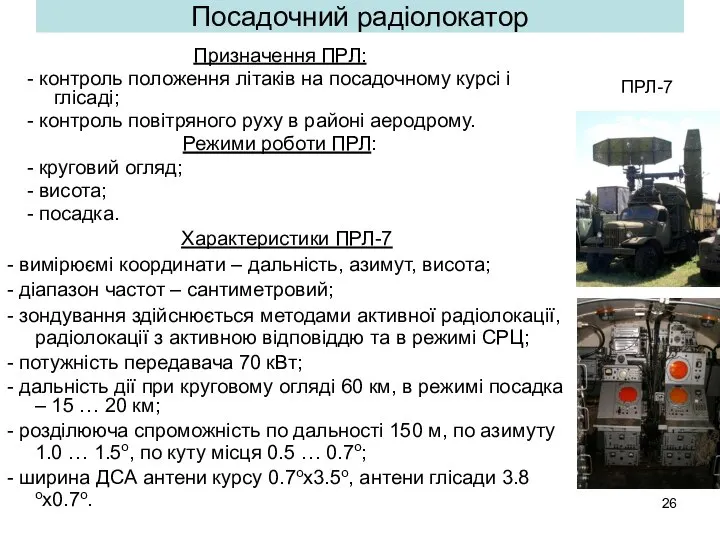
Посадочний радіолокатор
Призначення ПРЛ:
- контроль положення літаків на посадочному курсі і глісаді;
-
Посадочний радіолокатор
Призначення ПРЛ:
- контроль положення літаків на посадочному курсі і глісаді;
-
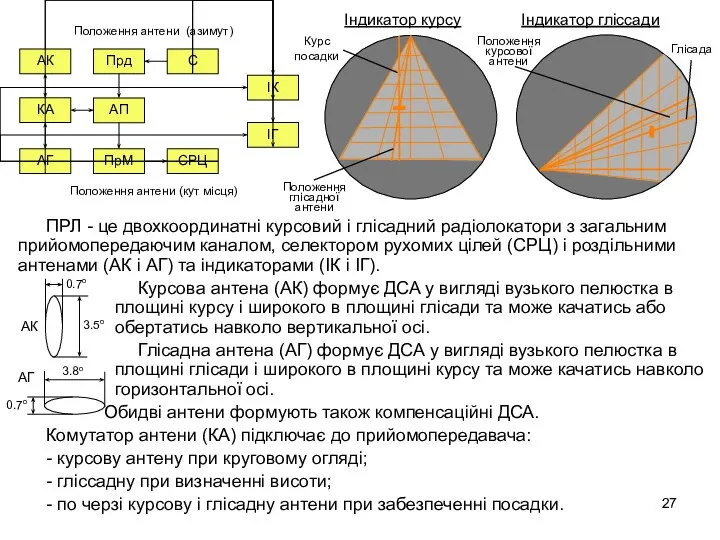
ПРЛ - це двохкоординатні курсовий і глісадний радіолокатори з загальним прийомопередаючим
ПРЛ - це двохкоординатні курсовий і глісадний радіолокатори з загальним прийомопередаючим
*
Система вторинної радіолокації
Система вторинної радіолокації (радіолокація з активною відповіддю) включає наземний
*
Система вторинної радіолокації
Система вторинної радіолокації (радіолокація з активною відповіддю) включає наземний

Радіомаячні системи посадки у комплексі з ОСП призначені для забезпечення приборної
Радіомаячні системи посадки у комплексі з ОСП призначені для забезпечення приборної
*
Погодні мінімуми і категорії систем посадки
КРМ з КРП вказують екіпажу положення
*
Погодні мінімуми і категорії систем посадки
КРМ з КРП вказують екіпажу положення

*
Класифікація радіомаячних систем посадки
*
Класифікація радіомаячних систем посадки
*
Антенна система радіомаяка формує дві незалежні ДСА – широку однопелюсткову G1(ϕ)
*
Антенна система радіомаяка формує дві незалежні ДСА – широку однопелюсткову G1(ϕ)
*
В бортовому курсовому приймачі спектр сумарного сигналу в залежності від сторони
*
В бортовому курсовому приймачі спектр сумарного сигналу в залежності від сторони
Двохчастотний КРМ з опорним нулем (ILS)
Як і в амплітудно-фазовому КРМ, антенна
Двохчастотний КРМ з опорним нулем (ILS)
Як і в амплітудно-фазовому КРМ, антенна
*
Спектри сигналів маяка на вході приймача:
а) амплітудно модульований сигнал частотами Fм1
*
Спектри сигналів маяка на вході приймача:
а) амплітудно модульований сигнал частотами Fм1
*
Двохчастотний КРМ з РСН (ILS)
Fм1=45 Гц, Fм2=150 Гц
Антенна система радіомаяка формує
*
Двохчастотний КРМ з РСН (ILS)
Fм1=45 Гц, Fм2=150 Гц
Антенна система радіомаяка формує
*
Спектри сигналів маяка на вході приймача:
а) амплітудно модульований сигнал частотою Fм1
*
Спектри сигналів маяка на вході приймача:
а) амплітудно модульований сигнал частотою Fм1
*
Двохчастотний ГРМ з РСН (СП-50)
У двохчастотному глісадному радіомаяку дециметрового діапазону площину
*
Двохчастотний ГРМ з РСН (СП-50)
У двохчастотному глісадному радіомаяку дециметрового діапазону площину
*
Спектри сигналів маяка на вході приймача:
а) балансно модульований сигнал частотою FМ1=45
*
Спектри сигналів маяка на вході приймача:
а) балансно модульований сигнал частотою FМ1=45
Двохчастотний ГРМ з опорним нулем (ILS)
Спектри сигналів маяка на вході приймача:
а)
Двохчастотний ГРМ з опорним нулем (ILS)
Спектри сигналів маяка на вході приймача:
а)
*
Призначення
ПРМГ-5 призначена для забезпечення заходу на посадку літаків при метеомінімумі І
*
Призначення
ПРМГ-5 призначена для забезпечення заходу на посадку літаків при метеомінімумі І
*
Канал посадки вітчизняних РСБН призначений для визначення відхилення літака по курсу
*
Канал посадки вітчизняних РСБН призначений для визначення відхилення літака по курсу
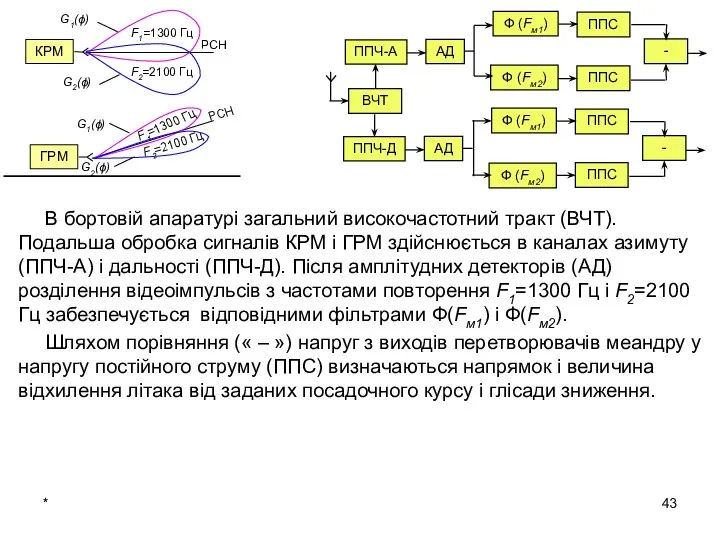
В бортовій апаратурі загальний високочастотний тракт (ВЧТ). Подальша обробка сигналів КРМ
В бортовій апаратурі загальний високочастотний тракт (ВЧТ). Подальша обробка сигналів КРМ
*
Недоліки радіомаячних систем посадки метрового діапазону
В УКХ діапазоні радіохвиль зони глісади
*
Недоліки радіомаячних систем посадки метрового діапазону
В УКХ діапазоні радіохвиль зони глісади
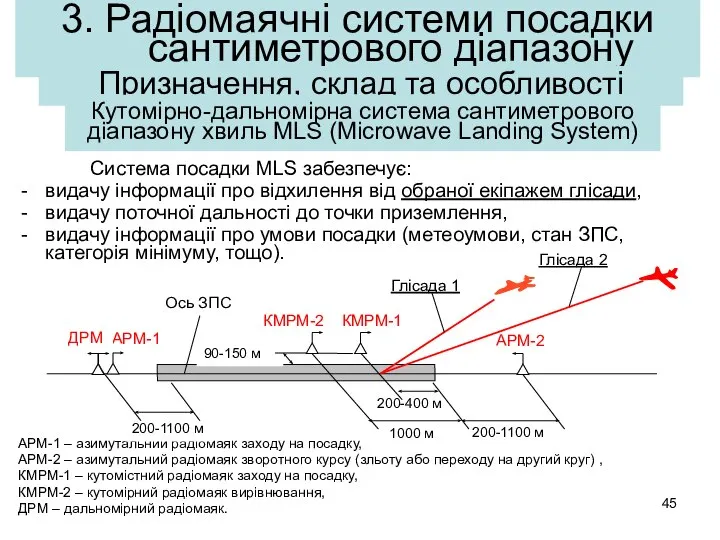
3. Радіомаячні системи посадки сантиметрового діапазону
Система посадки MLS забезпечує:
видачу інформації
3. Радіомаячні системи посадки сантиметрового діапазону
Система посадки MLS забезпечує:
видачу інформації
Загальна характеристика
1. Системи посадки (СП) сантиметрового діапазону у порівнянні з СП
Загальна характеристика
1. Системи посадки (СП) сантиметрового діапазону у порівнянні з СП
*
Кутомірна підсистема
Кутомірна підсистема працює в сантиметровому діапазоні хвиль fн=5031 ... 5091
*
Кутомірна підсистема
Кутомірна підсистема працює в сантиметровому діапазоні хвиль fн=5031 ... 5091
*
Дальномірна підсистема
Дальномірна підсистема працює в діапазоні fн=960 … 1215 МГц, має
*
Дальномірна підсистема
Дальномірна підсистема працює в діапазоні fн=960 … 1215 МГц, має
*
Бортове обладнання кожного з літаків, що здійснюють посадку, визначає відхилення по
*
Бортове обладнання кожного з літаків, що здійснюють посадку, визначає відхилення по
*
Функції системи і послідовності функцій
Звичайний режим:
П1: КМ-1, КМ-2,
*
Функції системи і послідовності функцій
Звичайний режим:
П1: КМ-1, КМ-2,
*
Принцип визначення напрямку
Якщо в границях сектору сканування ДСА знаходиться літак, то
*
Принцип визначення напрямку
Якщо в границях сектору сканування ДСА знаходиться літак, то
*
Часовий графік роботи системи посадки
Часовий графік виконання будь-якої функції включає інтнрвали
*
Часовий графік роботи системи посадки
Часовий графік виконання будь-якої функції включає інтнрвали
*
На інтервалі “туди” антеною з вузькою ДСА в площині сканування і
*
На інтервалі “туди” антеною з вузькою ДСА в площині сканування і

*
Порівняльні характеристики радіомаячних систем посадки
*
Порівняльні характеристики радіомаячних систем посадки
*
4. Застосування радіотехнічних систем посадки
Радіолокаційні системи посадки літаків включають диспетчерське і
*
4. Застосування радіотехнічних систем посадки
Радіолокаційні системи посадки літаків включають диспетчерське і
*
Екіпажу літака з КДП повідомляють посадочний курс, атмосферний тиск у районі
*
Екіпажу літака з КДП повідомляють посадочний курс, атмосферний тиск у районі
*
При польоті з посадочним курсом на ДПРМ здійснюється пробивання хмарності. До
*
При польоті з посадочним курсом на ДПРМ здійснюється пробивання хмарності. До
*
Застосування РСП
Виведення літаків в район аеродрому посадки в дальній зоні здійснюється
*
Застосування РСП
Виведення літаків в район аеродрому посадки в дальній зоні здійснюється
*
Управління літаками в районі аеродрому і на аеродромі після посадки чи
*
Управління літаками в районі аеродрому і на аеродромі після посадки чи
*
Режим ПРЛ “КРУГОВИЙ ОГЛЯД”
В режимі “КРУГОВИЙ ОГЛЯД” ПРЛ контролює повітряний простір
*
Режим ПРЛ “КРУГОВИЙ ОГЛЯД”
В режимі “КРУГОВИЙ ОГЛЯД” ПРЛ контролює повітряний простір
*
Режим ПРЛ “ВИСОТА”
Режим “ВИСОТА” забезпечує контроль зниження літака для посадки при
*
Режим ПРЛ “ВИСОТА”
Режим “ВИСОТА” забезпечує контроль зниження літака для посадки при
*
Режим ПРЛ “ПОСАДКА”
В цьому режимі ПРЛ являється трьохкоординатним радіолокатором і забезпечує
*
Режим ПРЛ “ПОСАДКА”
В цьому режимі ПРЛ являється трьохкоординатним радіолокатором і забезпечує
*
Виведення літака в район аеродрому і захід на посадку здійснюються з
*
Виведення літака в район аеродрому і захід на посадку здійснюються з
*
Автоматизований захід на посадку (РСБН+ПРМГ)
Режим „Повернення радійне”: польот на крейсерній
*
Автоматизований захід на посадку (РСБН+ПРМГ)
Режим „Повернення радійне”: польот на крейсерній
*
Питання для самоконтролю
Спрощена система посадки ОСП.
Радіолокаційна система посадки.
Радіомаячна система посадки
*
Питання для самоконтролю
Спрощена система посадки ОСП.
Радіолокаційна система посадки.
Радіомаячна система посадки
 Предпрядение
Предпрядение Диадемы и венцы в системе древнерусского ювелирного убора Xl-Xll веках
Диадемы и венцы в системе древнерусского ювелирного убора Xl-Xll веках Топографические карты и их чтение
Топографические карты и их чтение Живопись в XVIII в
Живопись в XVIII в Готическое искусство средневековья
Готическое искусство средневековья  ПРОФЕССИОНАЛЬНОЕ САМООПРЕДЕЛЕНИЕ УЧАЩИХСЯ
ПРОФЕССИОНАЛЬНОЕ САМООПРЕДЕЛЕНИЕ УЧАЩИХСЯ Вера и религия
Вера и религия Шебеко А.В. 12314. Программно-целевое планирование развитием сферы промышленности на примере города Караганды
Шебеко А.В. 12314. Программно-целевое планирование развитием сферы промышленности на примере города Караганды Презентация "Ян ван Эйк" - скачать презентации по МХК
Презентация "Ян ван Эйк" - скачать презентации по МХК Most... Łzy
Most... Łzy Презентация "Банковская система РФ и её совершенствование" - скачать презентации по Экономике
Презентация "Банковская система РФ и её совершенствование" - скачать презентации по Экономике SHAG-26-09-19
SHAG-26-09-19 Профессиональное образование в России: взгляд работодателя Вадим Новинский Председатель наблюдательного совета «Смарт-Хол
Профессиональное образование в России: взгляд работодателя Вадим Новинский Председатель наблюдательного совета «Смарт-Хол Христианство в современном мире
Христианство в современном мире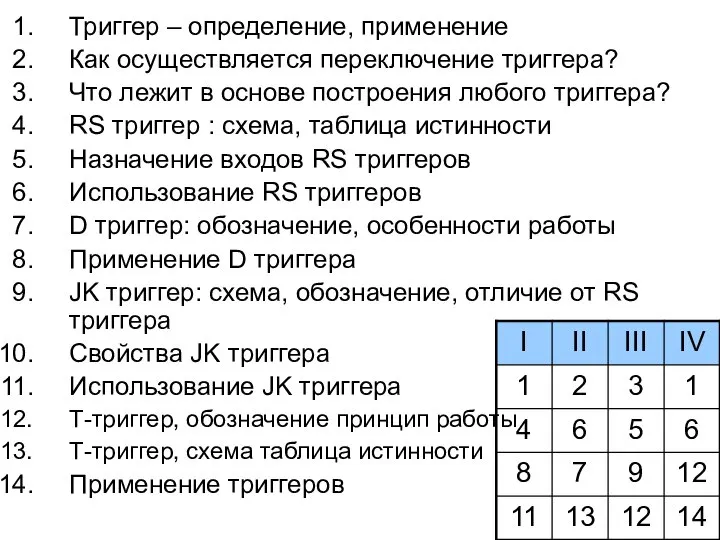 Регистры. Определение, применение, состав, виды
Регистры. Определение, применение, состав, виды Политические системы и режимы
Политические системы и режимы Откуда взялся UML
Откуда взялся UML Причины производства и развития современных технологий товаров Терешкова М. Лазарюк А. ДС5 ФТД5 _
Причины производства и развития современных технологий товаров Терешкова М. Лазарюк А. ДС5 ФТД5 _ Моделирование и анализ параллельных вычислений.
Моделирование и анализ параллельных вычислений.  Функції рекламного менеджменту
Функції рекламного менеджменту Международные валютные расчеты Подготовили студенты 3 курса ФТД Омельченко Марина и Резцов Илья
Международные валютные расчеты Подготовили студенты 3 курса ФТД Омельченко Марина и Резцов Илья Правовые основы охраны здоровья, трудовое право. Охрана труда
Правовые основы охраны здоровья, трудовое право. Охрана труда Сервисное локомотивное депо с разработкой участка по ремонту системы охлаждения
Сервисное локомотивное депо с разработкой участка по ремонту системы охлаждения Презентация Лица, ответственные за уплату таможенных пошлин, налогов
Презентация Лица, ответственные за уплату таможенных пошлин, налогов Англосаксонская правовая семья
Англосаксонская правовая семья Презентация игра по таможенному делу
Презентация игра по таможенному делу Математическая смекалка Математическая презентация с использованием интересных фактов из истории математики, примеров и задач н
Математическая смекалка Математическая презентация с использованием интересных фактов из истории математики, примеров и задач н Электрические системы запуска ГТД и системы зажигания топлива
Электрические системы запуска ГТД и системы зажигания топлива