- Теоретическая механика

Содержание
- 2. 2 семестр 3 семестр Теоретическая механика Кинематика Динамика Статика Зачет Экзамен
- 3. С Т А Т И К А Часть 1.
- 4. Литература Учебники 1. Тарг С.М. Краткий курс теоретической механики. 2. Яблонский А.А. Курс теоретической механики. Часть
- 5. Укрупненные темы статики
- 6. 1. Основные понятия и исходные положения статики
- 7. 1.1. Абсолютно твердое тело. Сила, системы сил. Определение статики Статикой называется раздел механики, в котором излагается
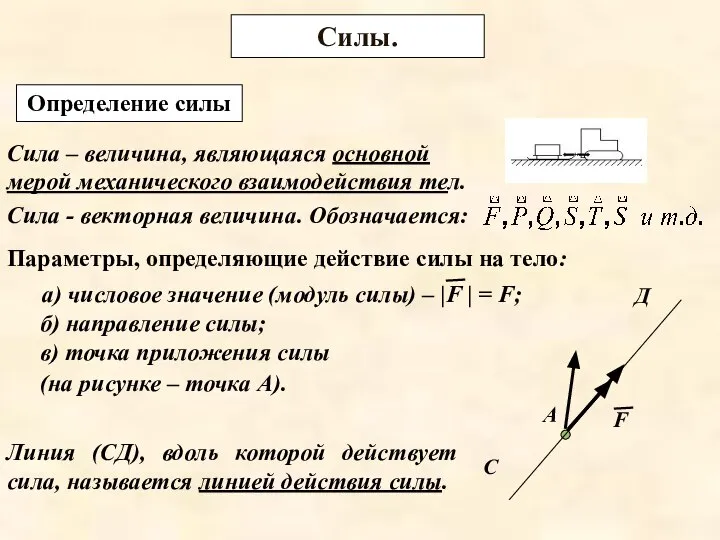
- 8. Силы. Определение силы Сила – величина, являющаяся основной мерой механического взаимодействия тел. Сила - векторная величина.
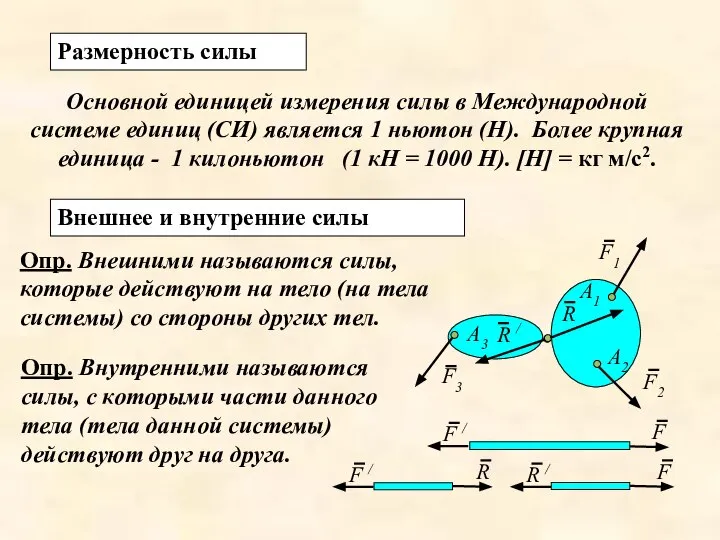
- 9. Размерность силы Основной единицей измерения силы в Международной системе единиц (СИ) является 1 ньютон (Н). Более
- 10. Сосредоточенные силы Опр. Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной. Распределенные силы
- 11. б) по линейному закону Заменяется сосредоточенной силой Q = q · l, приложенной к середине участка
- 12. в) распределенная по произвольному закону q(x) которая приложена в центре тяжести С фигуры, заключенной между осью
- 13. в) системы сил, линии действия которых пересекаются в одной точке, называется сходящимися; г) системы сил, линии
- 14. а) если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил;
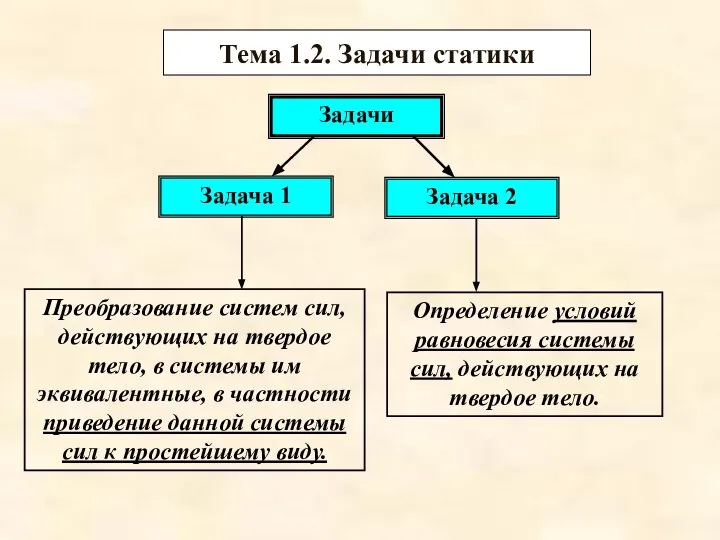
- 15. Тема 1.2. Задачи статики Задачи Задача 1 Задача 2 Преобразование систем сил, действующих на твердое тело,
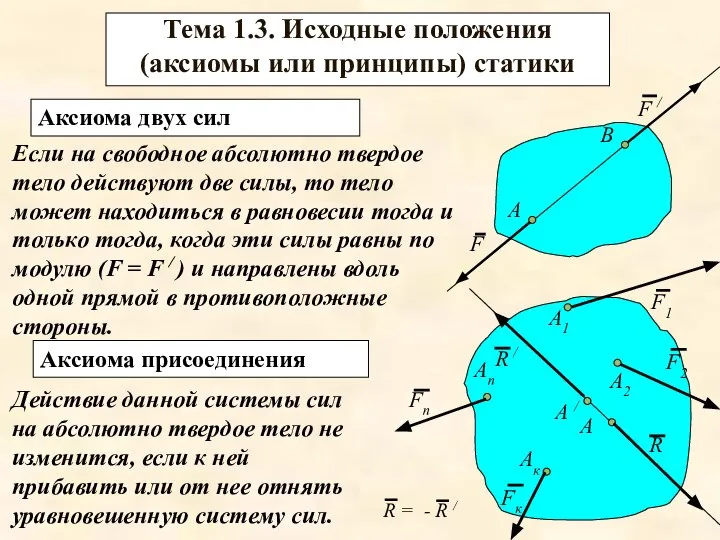
- 16. Тема 1.3. Исходные положения (аксиомы или принципы) статики Если на свободное абсолютно твердое тело действуют две
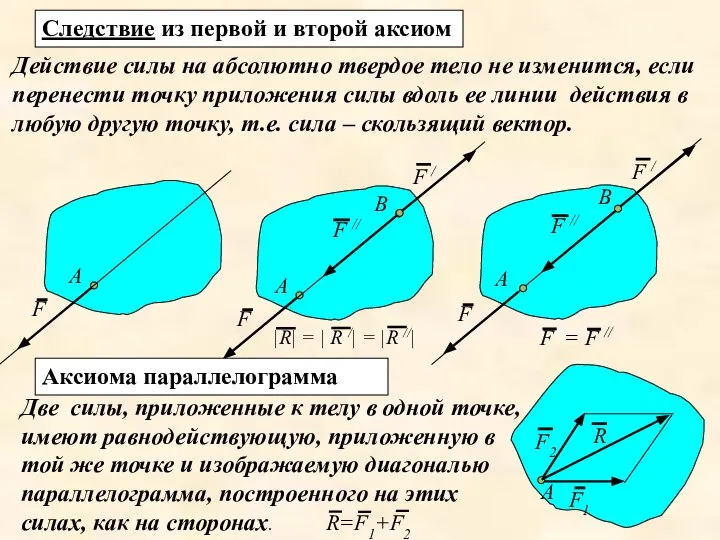
- 17. Следствие из первой и второй аксиом Действие силы на абсолютно твердое тело не изменится, если перенести
- 18. Аксиома равенства действия и противодействия При всяком действии одного материального тела на другое имеет место такое
- 19. Аксиома отвердевания (замораживания) Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если
- 20. Тема 1.4. Связи и их реакции Общие определения Определение связи Все то, что ограничивает перемещение тела
- 21. Основные виды связей. Гладкая плоскость (поверхность) или опора (свободное опирание) Опр. Гладкой называется поверхность, трением о
- 22. Нерастяжимая нить Опр. Нерастяжимой нитью называется связь, которая не дает телу удалиться от точки подвеса нити.
- 23. Неподвижный цилиндрический шарнир (подшипник) Опр. Неподвижным цилиндрическим шарниром (неподвижным шарниром) называется связь, которая осуществляет такое соединение
- 24. Подвижный цилиндрический шарнир. Опр. Подвижным цилиндрическим шарниром (подвижным шарниром или шарнирно-подвижной опорой) называется шарнирно-подвижной опоры проходит
- 25. Сферический шарнир (подпятник) . Опр. Сферическим (шаровым) шарниром называется связь, которая позволяет соединенным телам как угодно
- 26. Невесомый стержень. Опр. Невесомым называется стержень, весом которого по сравнению с воспринимаемой им нагрузкой можно пренебречь.
- 27. Жесткая заделка (или неподвижная защемленная опора). Опр. Жесткой заделкой называется связь, которая ограничивает любое перемещение тела.
- 28. Скользящая жесткая заделка. Опр. Скользящей жесткой заделкой называется связь, которая ограничивает любое перемещение тела кроме движения
- 29. Геометрическая сумма Сложение 2-х сил. А в соответствии с аксиомой параллелограмма находится по правилу параллелограмма, т.е.
- 30. Геометрическая сумма Сложение 3-х сил, не лежащих в одной плоскости. не лежащих в одной плоскости, определяется
- 31. Сложение системы сил . Опр. Главным вектором любой системы сил называется геометрическая сумма всех сил, входящих
- 32. 2.2. Разложение сил Разложение силы по двум заданным направлениям. Пусть требуется разложить силу А D B
- 34. Скачать презентацию
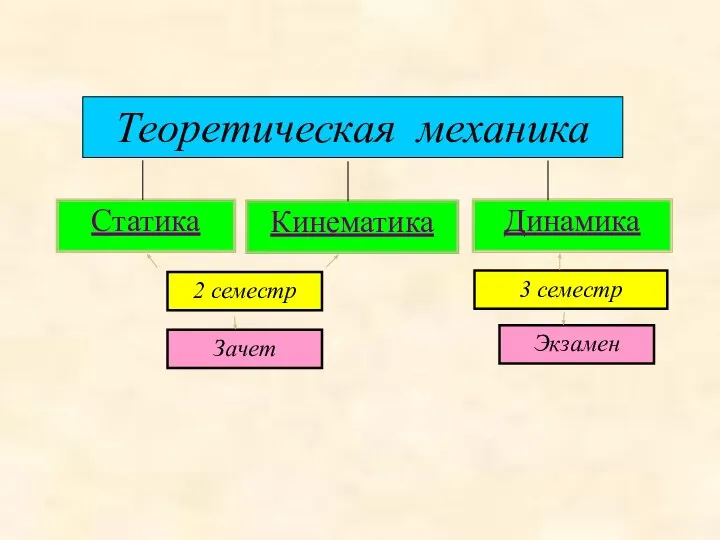
2 семестр
3 семестр
Теоретическая механика
Кинематика
Динамика
Статика
Зачет
Экзамен
2 семестр
3 семестр
Теоретическая механика
Кинематика
Динамика
Статика
Зачет
Экзамен
С Т А Т И К А
Часть 1.
С Т А Т И К А
Часть 1.
Литература
Учебники
1. Тарг С.М. Краткий курс теоретической механики.
2. Яблонский А.А.
Литература
Учебники
1. Тарг С.М. Краткий курс теоретической механики.
2. Яблонский А.А.
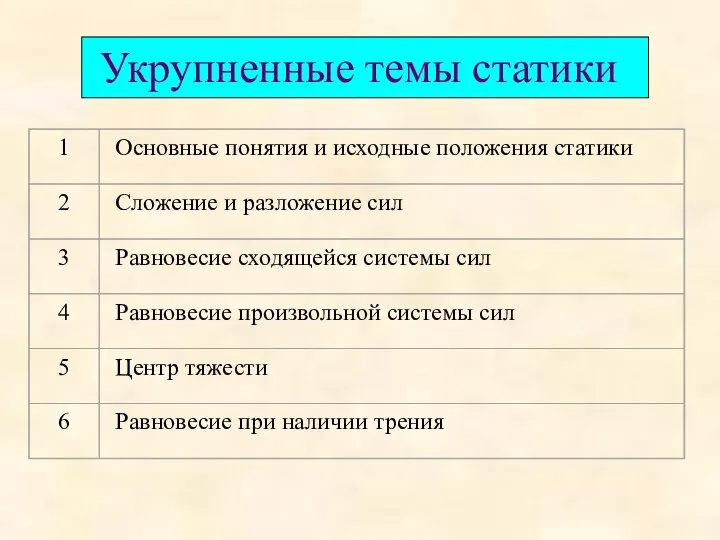
Укрупненные темы статики
Укрупненные темы статики
1. Основные понятия и исходные положения статики
1. Основные понятия и исходные положения статики
1.1. Абсолютно твердое тело. Сила, системы сил.
Определение статики
Статикой называется раздел
1.1. Абсолютно твердое тело. Сила, системы сил.
Определение статики
Статикой называется раздел
Силы.
Определение силы
Сила – величина, являющаяся основной мерой механического взаимодействия
Силы.
Определение силы
Сила – величина, являющаяся основной мерой механического взаимодействия
Размерность силы
Основной единицей измерения силы в Международной системе единиц (СИ) является
Размерность силы
Основной единицей измерения силы в Международной системе единиц (СИ) является
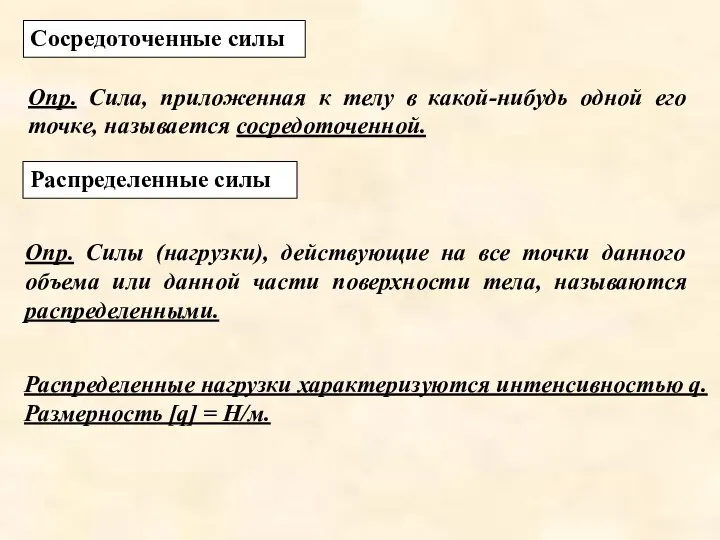
Сосредоточенные силы
Опр. Сила, приложенная к телу в какой-нибудь одной его
Сосредоточенные силы
Опр. Сила, приложенная к телу в какой-нибудь одной его
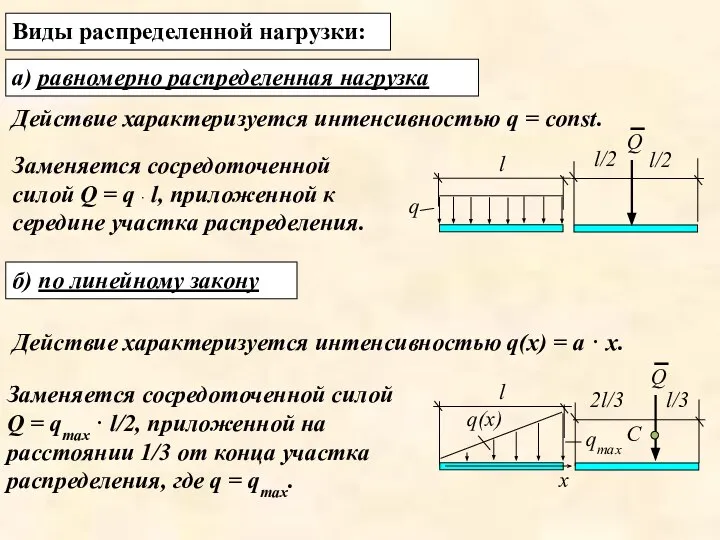
б) по линейному закону
Заменяется сосредоточенной силой Q = q · l,
б) по линейному закону
Заменяется сосредоточенной силой Q = q · l,
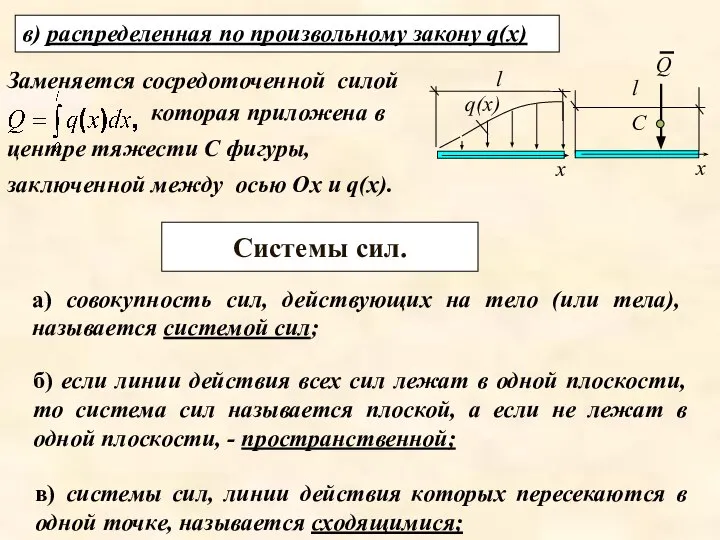
в) распределенная по произвольному закону q(x)
которая приложена в центре тяжести
в) распределенная по произвольному закону q(x)
которая приложена в центре тяжести
в) системы сил, линии действия которых пересекаются в одной точке, называется
в) системы сил, линии действия которых пересекаются в одной точке, называется
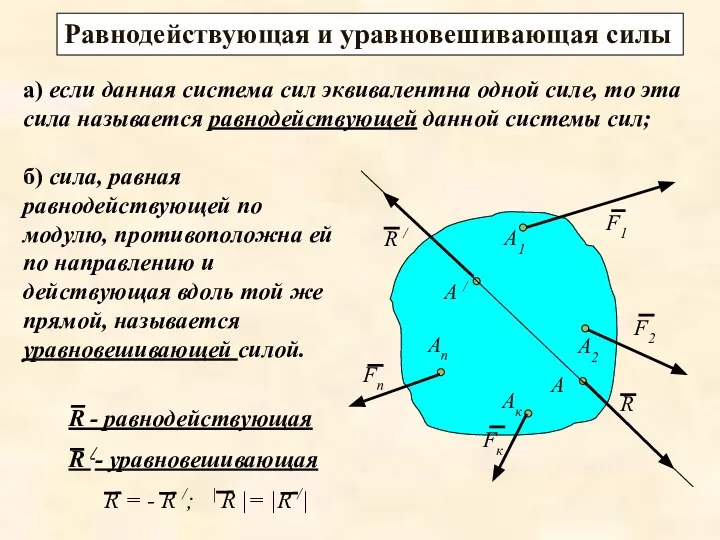
а) если данная система сил эквивалентна одной силе, то эта сила
а) если данная система сил эквивалентна одной силе, то эта сила
Тема 1.2. Задачи статики
Задачи
Задача 1
Задача 2
Преобразование систем сил, действующих на
Тема 1.2. Задачи статики
Задачи
Задача 1
Задача 2
Преобразование систем сил, действующих на
Тема 1.3. Исходные положения (аксиомы или принципы) статики
Если на свободное
Тема 1.3. Исходные положения (аксиомы или принципы) статики
Если на свободное
Следствие из первой и второй аксиом
Действие силы на абсолютно твердое тело
Следствие из первой и второй аксиом
Действие силы на абсолютно твердое тело
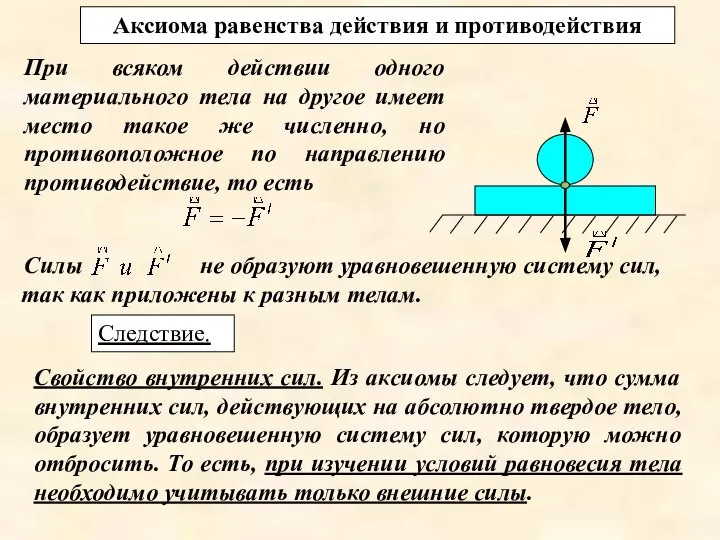
Аксиома равенства действия и противодействия
При всяком действии одного материального тела
Аксиома равенства действия и противодействия
При всяком действии одного материального тела
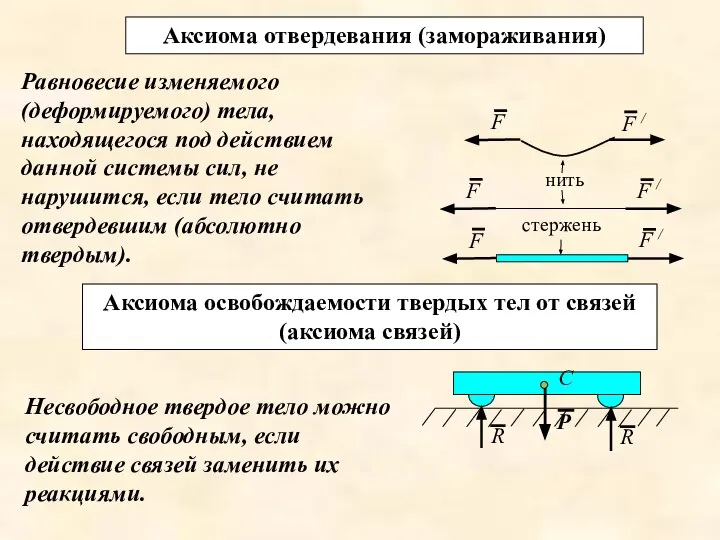
Аксиома отвердевания (замораживания)
Равновесие изменяемого (деформируемого) тела, находящегося под действием данной
Аксиома отвердевания (замораживания)
Равновесие изменяемого (деформируемого) тела, находящегося под действием данной
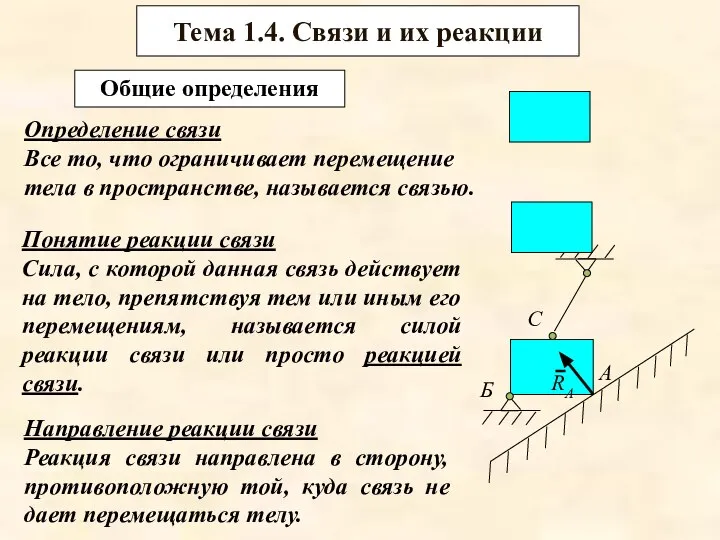
Тема 1.4. Связи и их реакции
Общие определения
Определение связи
Все
Тема 1.4. Связи и их реакции
Общие определения
Определение связи
Все
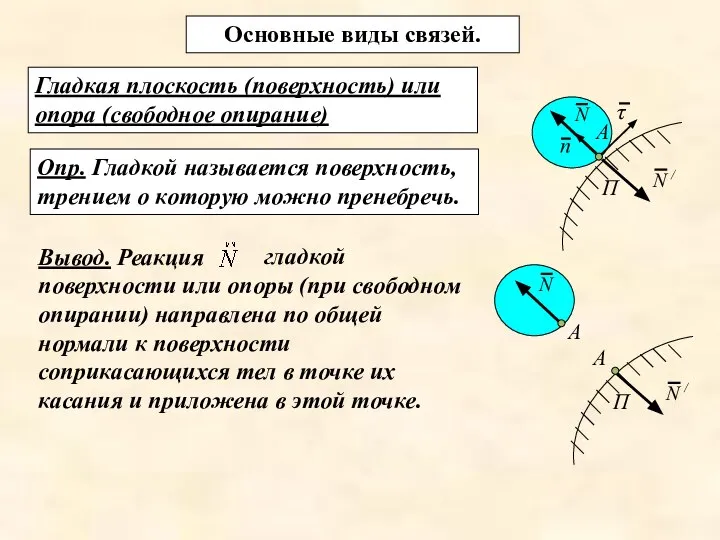
Основные виды связей.
Гладкая плоскость (поверхность) или опора (свободное опирание)
Опр. Гладкой
Основные виды связей.
Гладкая плоскость (поверхность) или опора (свободное опирание)
Опр. Гладкой
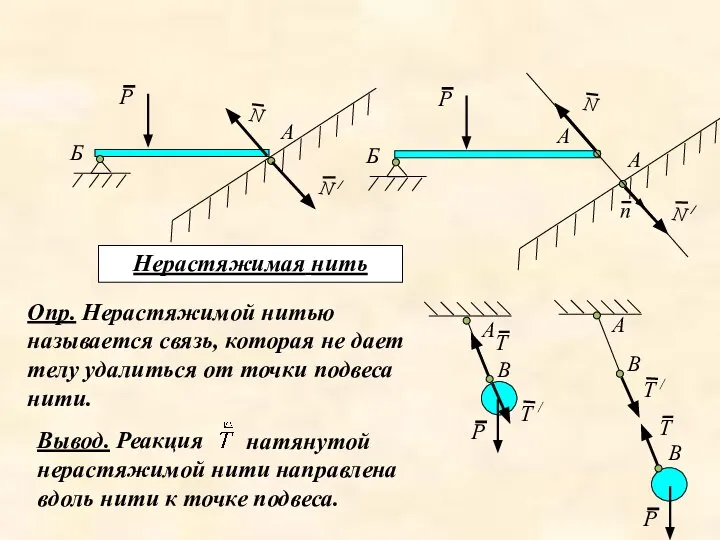
Нерастяжимая нить
Опр. Нерастяжимой нитью называется связь, которая не дает телу удалиться
Нерастяжимая нить
Опр. Нерастяжимой нитью называется связь, которая не дает телу удалиться
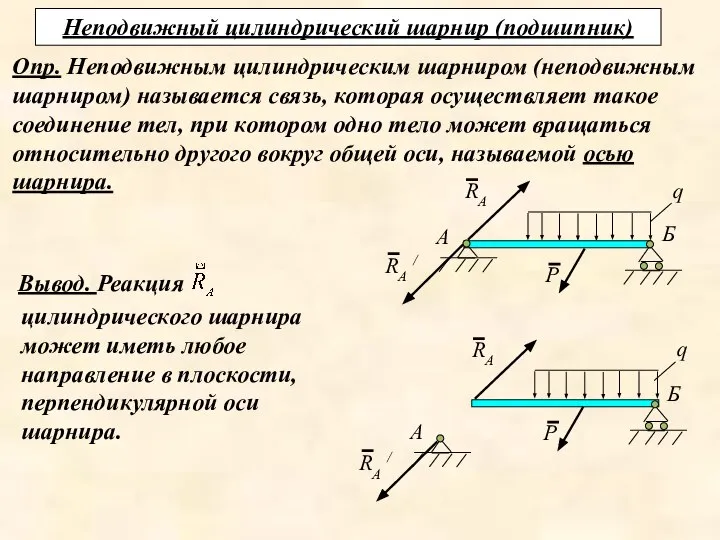
Неподвижный цилиндрический шарнир (подшипник)
Опр. Неподвижным цилиндрическим шарниром (неподвижным шарниром) называется связь,
Неподвижный цилиндрический шарнир (подшипник)
Опр. Неподвижным цилиндрическим шарниром (неподвижным шарниром) называется связь,
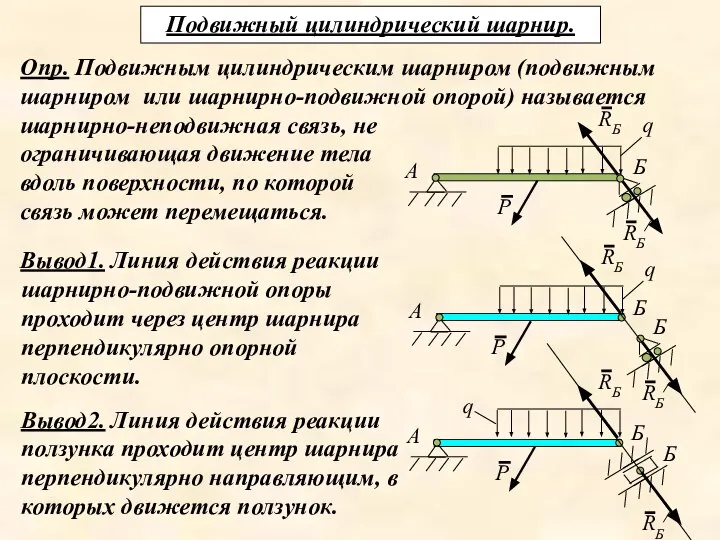
Подвижный цилиндрический шарнир.
Опр. Подвижным цилиндрическим шарниром (подвижным шарниром или шарнирно-подвижной опорой)
Подвижный цилиндрический шарнир.
Опр. Подвижным цилиндрическим шарниром (подвижным шарниром или шарнирно-подвижной опорой)
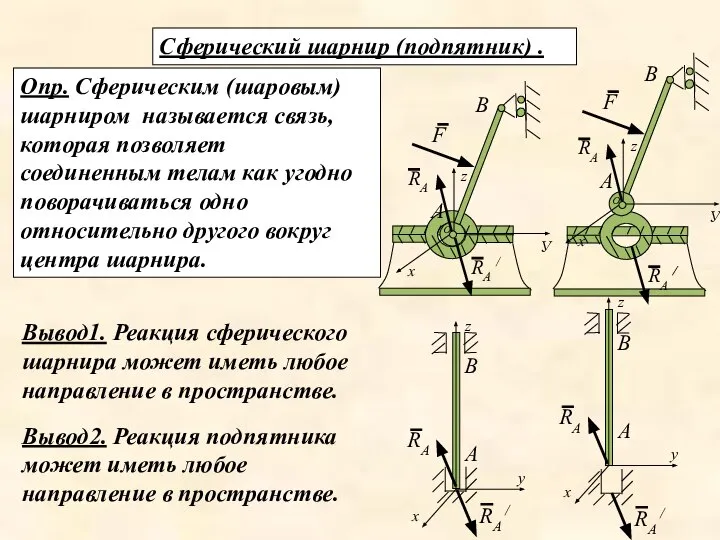
Сферический шарнир (подпятник) .
Опр. Сферическим (шаровым) шарниром называется связь, которая
Сферический шарнир (подпятник) .
Опр. Сферическим (шаровым) шарниром называется связь, которая
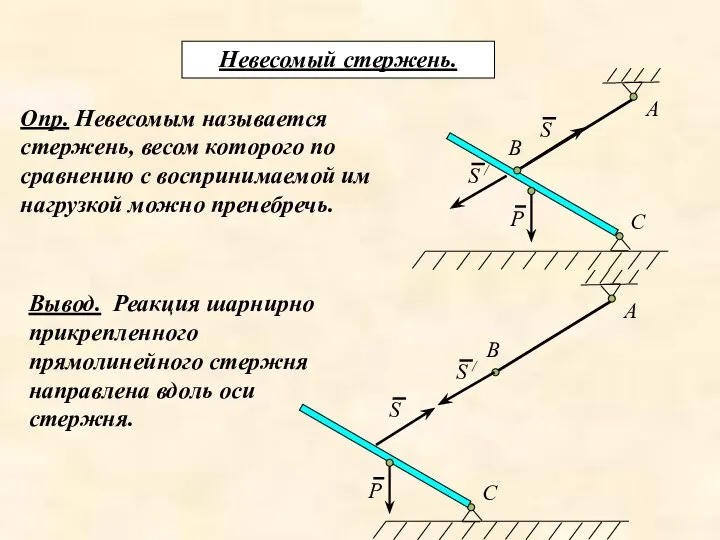
Невесомый стержень.
Опр. Невесомым называется стержень, весом которого по сравнению с
Невесомый стержень.
Опр. Невесомым называется стержень, весом которого по сравнению с
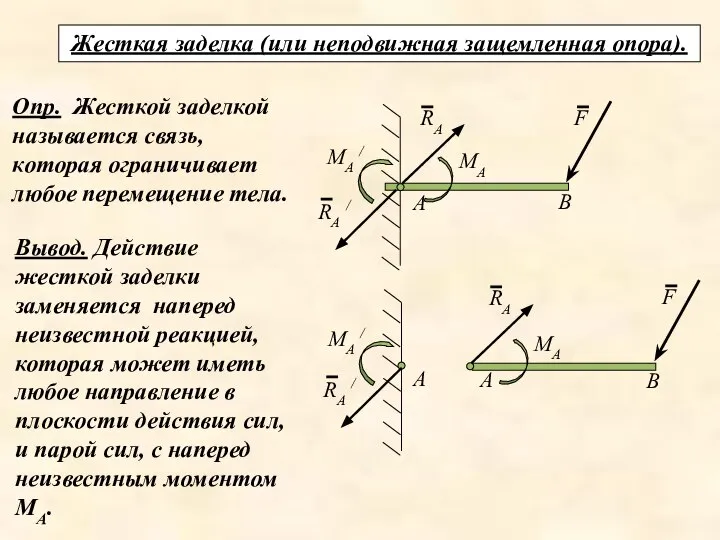
Жесткая заделка (или неподвижная защемленная опора).
Опр. Жесткой заделкой называется связь, которая
Жесткая заделка (или неподвижная защемленная опора).
Опр. Жесткой заделкой называется связь, которая
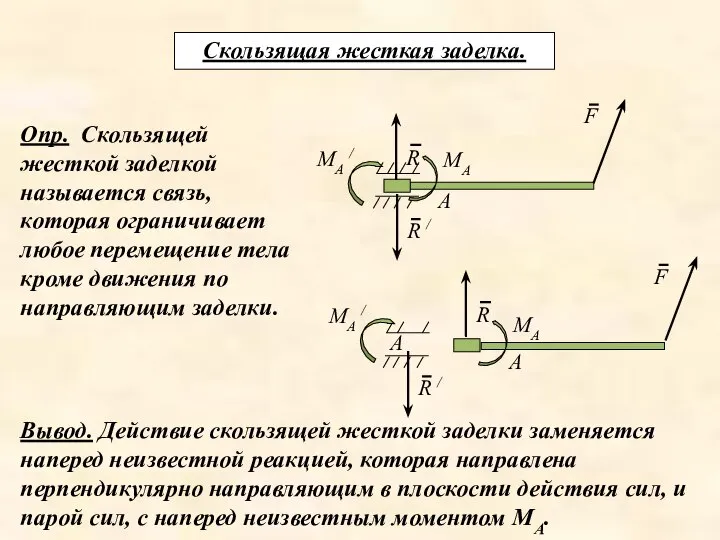
Скользящая жесткая заделка.
Опр. Скользящей жесткой заделкой называется связь, которая ограничивает
Скользящая жесткая заделка.
Опр. Скользящей жесткой заделкой называется связь, которая ограничивает
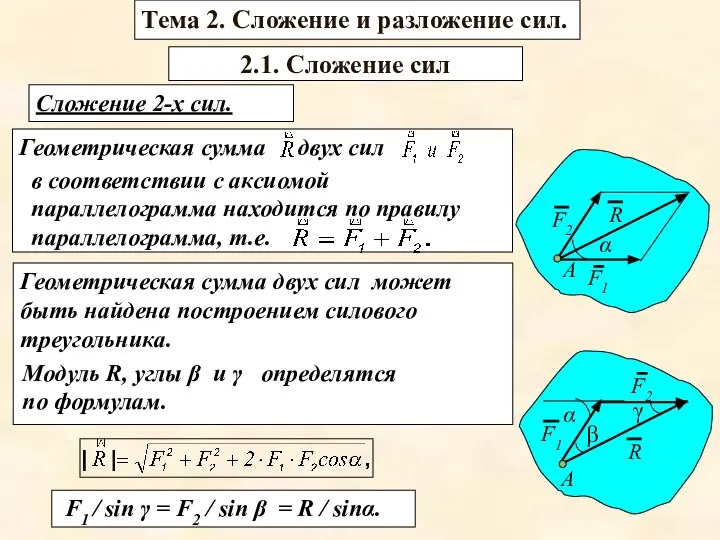
Геометрическая сумма
Сложение 2-х сил.
А
в соответствии с аксиомой параллелограмма находится по
Геометрическая сумма
Сложение 2-х сил.
А
в соответствии с аксиомой параллелограмма находится по
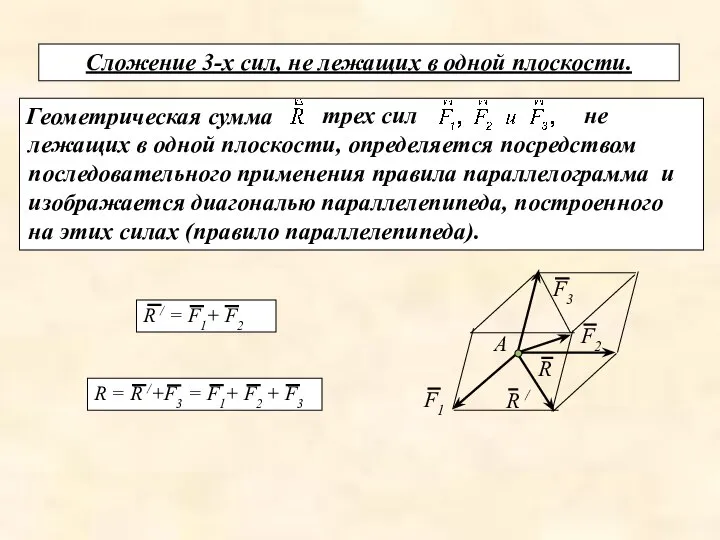
Геометрическая сумма
Сложение 3-х сил, не лежащих в одной плоскости.
не лежащих
Геометрическая сумма
Сложение 3-х сил, не лежащих в одной плоскости.
не лежащих

Сложение системы сил .
Опр. Главным вектором любой системы сил называется геометрическая
Сложение системы сил .
Опр. Главным вектором любой системы сил называется геометрическая
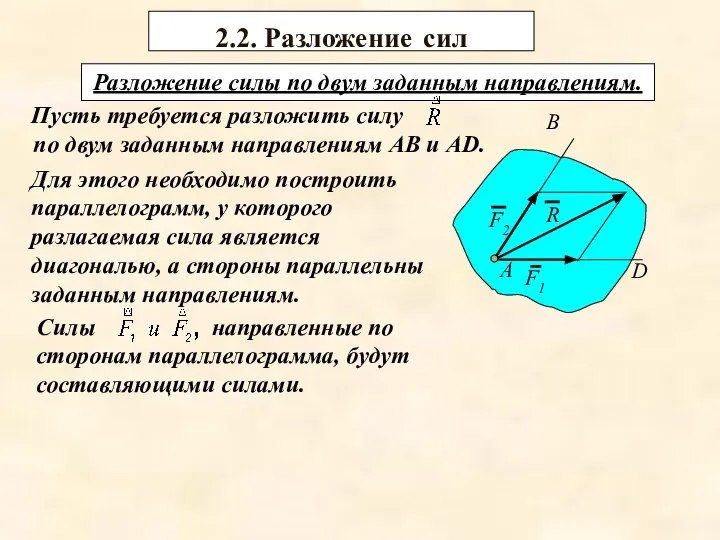
2.2. Разложение сил
Разложение силы по двум заданным направлениям.
Пусть требуется
2.2. Разложение сил
Разложение силы по двум заданным направлениям.
Пусть требуется
 Предмет і завдання лексикології
Предмет і завдання лексикології Спортивная ходьба
Спортивная ходьба Тема: Путешествие в мир поэзии. Цель урока: дать понятие об отличии стиха от прозы, научить выразительно читать стихи, научить опыт
Тема: Путешествие в мир поэзии. Цель урока: дать понятие об отличии стиха от прозы, научить выразительно читать стихи, научить опыт Умножение натуральных чисел и его свойства - презентация по Алгебре
Умножение натуральных чисел и его свойства - презентация по Алгебре Оздоровительные технологии, психологические и медико-биологические проблемы физической культуры и спорта
Оздоровительные технологии, психологические и медико-биологические проблемы физической культуры и спорта Ленд-арт
Ленд-арт ФОРМИРОВАНИЕ ВЫЧИСЛИТЕЛЬНЫХ НАВЫКОВ НА УРОКАХ МАТЕМАТИКИ Хлевнюк Н.Н., Иванова М.В. «Формирование вычислительных навыков на урок
ФОРМИРОВАНИЕ ВЫЧИСЛИТЕЛЬНЫХ НАВЫКОВ НА УРОКАХ МАТЕМАТИКИ Хлевнюк Н.Н., Иванова М.В. «Формирование вычислительных навыков на урок Цель урока: рассмотреть художественное своеобразие романа «Отцы и дети» и определить, в чем заключалось новаторство И.С.Тургенева.
Цель урока: рассмотреть художественное своеобразие романа «Отцы и дети» и определить, в чем заключалось новаторство И.С.Тургенева. Комплекс упражнений и подвижных игр на координационное развитие для учащихся начальных классов
Комплекс упражнений и подвижных игр на координационное развитие для учащихся начальных классов Массивы
Массивы .09.19
.09.19 Проектное обучение на уроках литературы в 10-11 классах.
Проектное обучение на уроках литературы в 10-11 классах.  Город оружейников. Заказчик – ООО «Инвестфинансстрой»
Город оружейников. Заказчик – ООО «Инвестфинансстрой» Проведение оценки воздействия на окружающую среду в Республике Беларусь
Проведение оценки воздействия на окружающую среду в Республике Беларусь Производные (пользовательские) типы данных
Производные (пользовательские) типы данных Виконання ремонтних робіт учнями групи ТУ-2
Виконання ремонтних робіт учнями групи ТУ-2 2. ОБЛИГАЦИИ
2. ОБЛИГАЦИИ  Презентация Решение уравнений и неравенств
Презентация Решение уравнений и неравенств Національно-патріотичне виховання в ДНЗ №4
Національно-патріотичне виховання в ДНЗ №4 СТРИОПАЛЛИДАРНАЯ СИСТЕМА. МЕТОДИКА ИССЛЕДОВАНИЯ. СИНДРОМЫ ПОРАЖЕНИЯ
СТРИОПАЛЛИДАРНАЯ СИСТЕМА. МЕТОДИКА ИССЛЕДОВАНИЯ. СИНДРОМЫ ПОРАЖЕНИЯ Средства измерений
Средства измерений  Воспитание личности методом арт-терапии Санкт-Петербург 2012
Воспитание личности методом арт-терапии Санкт-Петербург 2012  Презентация "З досвіду роботи" - скачать презентации по МХК
Презентация "З досвіду роботи" - скачать презентации по МХК Типы мониторов
Типы мониторов Летняя образовательная смена СФУ «Бельчонок»
Летняя образовательная смена СФУ «Бельчонок» Техническое обслуживание и ремонт рулевого управления автомобиля КамАЗ-5320
Техническое обслуживание и ремонт рулевого управления автомобиля КамАЗ-5320 Презентация Ценообразующие факторы российского рубля
Презентация Ценообразующие факторы российского рубля  Планеты Солнечной системы. Представление о них по Корану и сунне
Планеты Солнечной системы. Представление о них по Корану и сунне