- Теория колебаний

Содержание
- 2. ТЕОРИЯ КОЛЕБАНИЙ Д.В. Семенихина д.т.н., профессор кафедры Антенн и радиопередающих устройств
- 3. ВВЕДЕНИЕ Определение и значение теории колебаний, предмет ее исследования Предметом теории колебаний является динамическая система, а
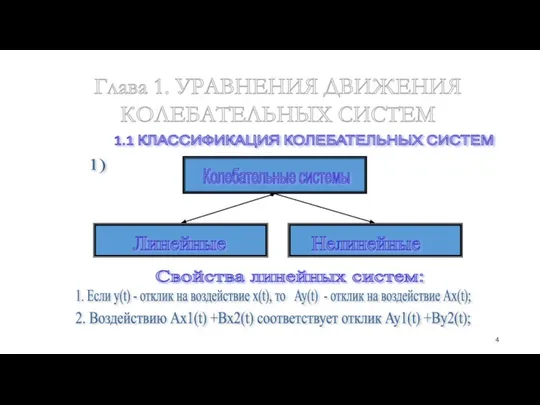
- 4. 1) 1.1 КЛАССИФИКАЦИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ Глава 1. УРАВНЕНИЯ ДВИЖЕНИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ Колебательные системы Линейные Нелинейные Свойства
- 5. 2) Колебательные системы Дискретные Сплошные 0,5 ст.св. 1 ст.св. 1,5 ст.св. 1 мер. 2 мер. 3
- 6. 3) Колебательные системы Консервативные Диссипативные Пассивные Активные Усилители Генераторы
- 7. 4) Колебательные системы Автономные Неавтономные С непосредственным воздействием Параметрические С комбинированным воздействием Примеры:
- 10. Скачать презентацию
ТЕОРИЯ КОЛЕБАНИЙ
Д.В. Семенихина
д.т.н., профессор кафедры Антенн и радиопередающих устройств
ТЕОРИЯ КОЛЕБАНИЙ
Д.В. Семенихина
д.т.н., профессор кафедры Антенн и радиопередающих устройств
ВВЕДЕНИЕ
Определение и значение теории колебаний, предмет ее исследования
Предметом теории
ВВЕДЕНИЕ
Определение и значение теории колебаний, предмет ее исследования
Предметом теории
1)
1.1 КЛАССИФИКАЦИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ
Глава 1. УРАВНЕНИЯ ДВИЖЕНИЯ
КОЛЕБАТЕЛЬНЫХ СИСТЕМ
Колебательные
1)
1.1 КЛАССИФИКАЦИЯ КОЛЕБАТЕЛЬНЫХ СИСТЕМ
Глава 1. УРАВНЕНИЯ ДВИЖЕНИЯ
КОЛЕБАТЕЛЬНЫХ СИСТЕМ
Колебательные
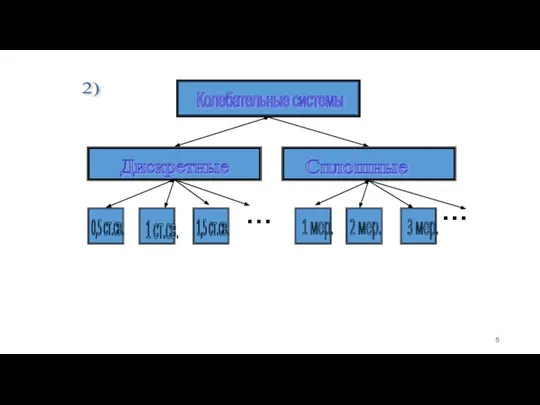
2)
Колебательные системы
Дискретные
Сплошные
0,5 ст.св.
1 ст.св.
1,5 ст.св.
2)
Колебательные системы
Дискретные
Сплошные
0,5 ст.св.
1 ст.св.
1,5 ст.св.
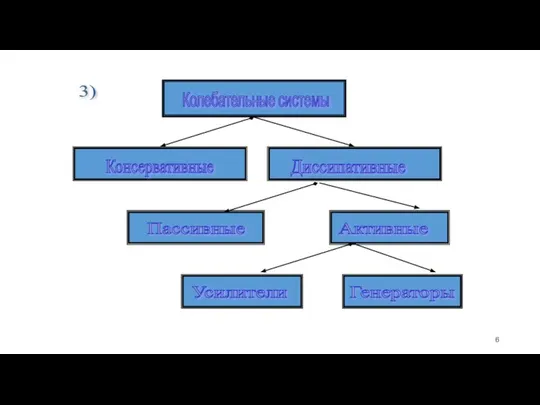
3)
Колебательные системы
Консервативные
Диссипативные
Пассивные
Активные
Усилители
Генераторы
3)
Колебательные системы
Консервативные
Диссипативные
Пассивные
Активные
Усилители
Генераторы
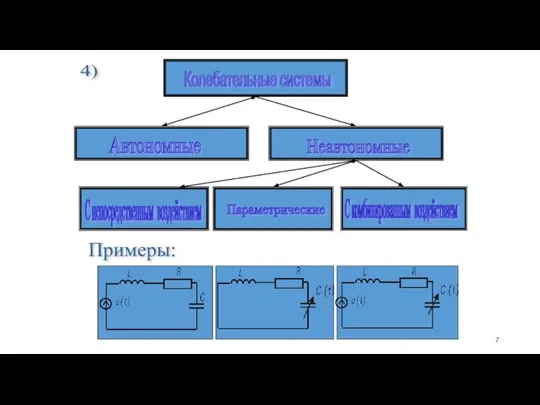
4)
Колебательные системы
Автономные
Неавтономные
С непосредственным воздействием
Параметрические
С комбинированным
4)
Колебательные системы
Автономные
Неавтономные
С непосредственным воздействием
Параметрические
С комбинированным

 Принятие решения о выпуске в дуополии Курно
Принятие решения о выпуске в дуополии Курно  Принципы телефонной коммутации
Принципы телефонной коммутации  Правоохранительные органы ОРД
Правоохранительные органы ОРД Организация проектной технологии на практическом занятии в СПО
Организация проектной технологии на практическом занятии в СПО Как спланировать поездку в Японию
Как спланировать поездку в Японию Қытай мен Қазақстанның байланысы
Қытай мен Қазақстанның байланысы Обеспечение пожаровзрывобезопасности систем отопления
Обеспечение пожаровзрывобезопасности систем отопления Финансы и финансовая система
Финансы и финансовая система  Презентация на тему "Бронхит" - скачать презентации по Медицине
Презентация на тему "Бронхит" - скачать презентации по Медицине Педагогический опыт – как фактор профессиональной успешности педагога
Педагогический опыт – как фактор профессиональной успешности педагога Определение уравнения движения. Общий случай интегрального уравнения
Определение уравнения движения. Общий случай интегрального уравнения КОНФЛИКТНЫЕ МОДЕЛИ ОБЩЕСТВА
КОНФЛИКТНЫЕ МОДЕЛИ ОБЩЕСТВА Синдбад-мореход - презентация для начальной школы
Синдбад-мореход - презентация для начальной школы Философия и методология исследовательской деятельности
Философия и методология исследовательской деятельности  Монархия на примере Нидерландов
Монархия на примере Нидерландов Презентация Натуральное хозяйство. Развитие товарного производства
Презентация Натуральное хозяйство. Развитие товарного производства  Уголовная ответственность животных Федина Юля
Уголовная ответственность животных Федина Юля Презентация "Гвидо Рени" - скачать презентации по МХК
Презентация "Гвидо Рени" - скачать презентации по МХК КЛАССИФИКАЦИЯ ИНФОРМАЦИОННЫХ МЕДИЦИНСКИХ СИСТЕМ
КЛАССИФИКАЦИЯ ИНФОРМАЦИОННЫХ МЕДИЦИНСКИХ СИСТЕМ Политическая жизнь общества. Политика и власть
Политическая жизнь общества. Политика и власть Переходный возраст Урок №1 Обществознание 7 класс
Переходный возраст Урок №1 Обществознание 7 класс Подготовка и планирование аудиторской проверки Ухалова Лариса М 111б
Подготовка и планирование аудиторской проверки Ухалова Лариса М 111б Региональная и национальная безопасность
Региональная и национальная безопасность Сопроводительный адрес для почтовых посылок (CN 22, CN 23). Международный стандартный образец
Сопроводительный адрес для почтовых посылок (CN 22, CN 23). Международный стандартный образец Основы религиозных культур и светской этики Основы религиозных культур и светской этики
Основы религиозных культур и светской этики Основы религиозных культур и светской этики  Diplomatic relationship between Kazakhstan and Russia
Diplomatic relationship between Kazakhstan and Russia Комманда успеха
Комманда успеха Mein Lieblingsautor ist Stan Lee
Mein Lieblingsautor ist Stan Lee