- Теория механизмов и машин. Кинематический анализ механизмов

Содержание
- 2. Основные задачи кинематического анализа механизмов Определение положений звеньев, включая и определение траекторий отдельных точек звеньев Определение
- 3. Кинематический анализ состоит в определении движения звеньев механизма по заданному движению начальных звеньев. Начальное звено –
- 4. Методы кинематического анализа Графический Графо-аналитический Аналитический
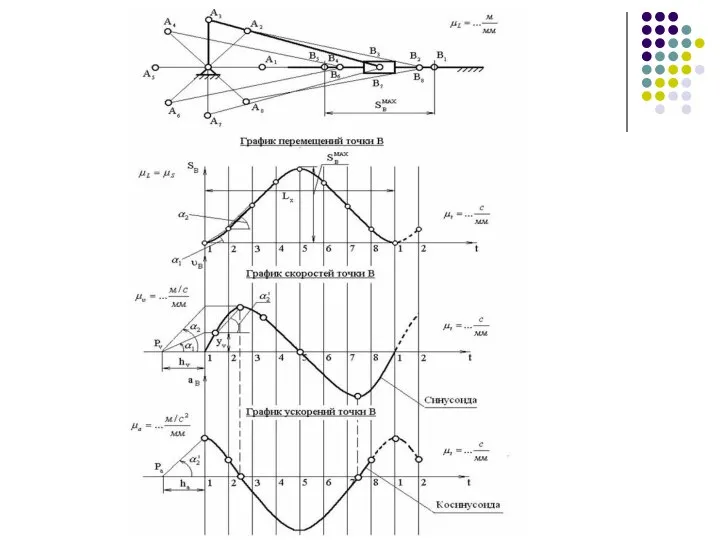
- 5. Графические методы Графические методы основаны на непосредственном построении траекторий движения наиболее характерных точек механизма, графическом дифференцировании
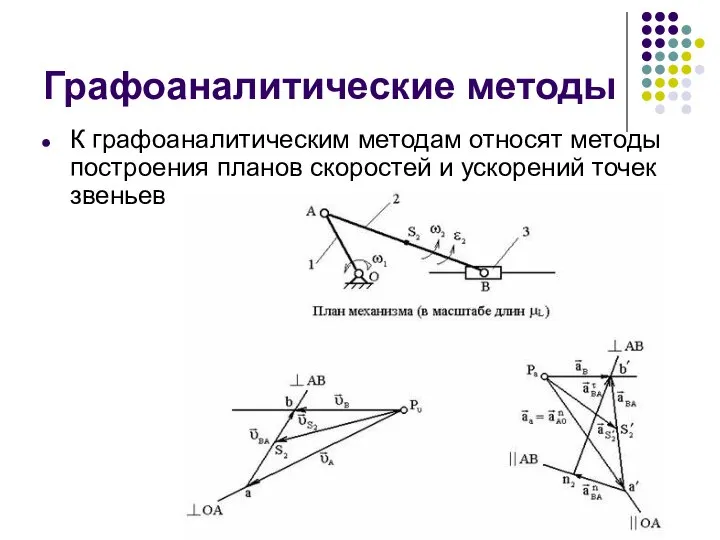
- 7. Графоаналитические методы К графоаналитическим методам относят методы построения планов скоростей и ускорений точек звеньев.
- 8. Свойства планов скоростей и ускорений Планом скоростей (ускорений) механизма называется чертеж, на котором изображены в виде
- 9. Аналитические методы Метод преобразования координат (метод Ю.Ф.Морошкина) Метод замкнутого векторного контура (метод В.А.Зиновьева)
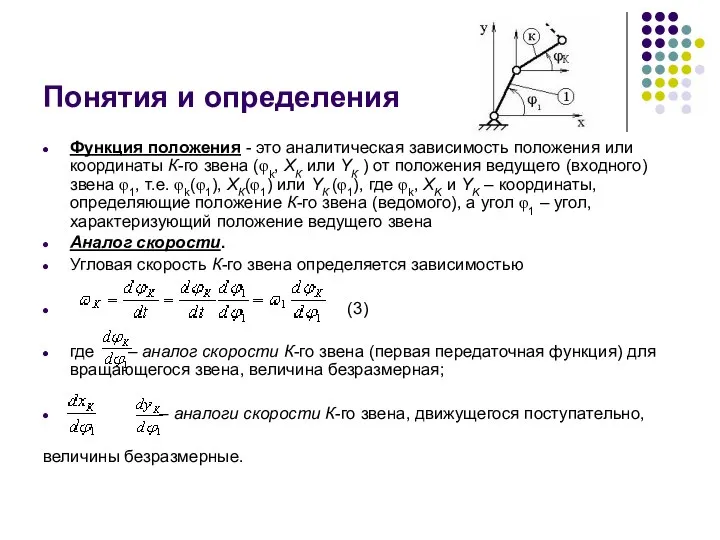
- 10. Понятия и определения Функция положения - это аналитическая зависимость положения или координаты К-го звена (φk, ХК
- 11. Аналог ускорения. Угловая скорость К-го звена определяется зависимостью, получаемой дифференцированием уравнения (3) по dt: При дифференцировании
- 12. Величину называют ещё передаточным отношением, так как выражение можно преобразовать, умножив и разделив его на величину
- 14. Метод замкнутых векторных контуров Рассмотрим замкнутый векторный контур. Составим векторное уравнение: Спроектируем векторное уравнение на оси
- 15. Решение задачи о положениях Определим функции положения ползуна C и шатуна 2 . Решение задачи о
- 16. Алгоритмический метод векторного анализа Кинематический анализ механизма ведется в следующем порядке: сначала исследуется движение начальных звеньев,
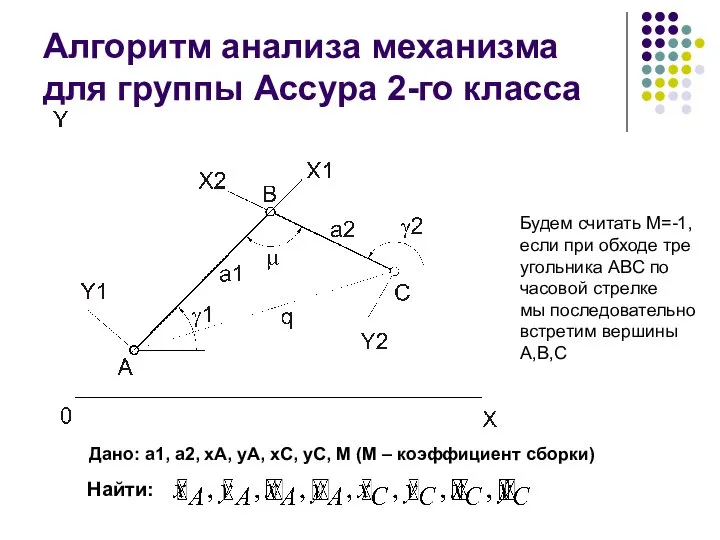
- 17. Алгоритм анализа механизма 1-го класса Дано: Найти:
- 18. Алгоритм для механизма 1 класса φ=ωt dφ/dt=ω
- 19. Алгоритм анализа механизма для группы Ассура 2-го класса Будем считать М=-1, если при обходе тре угольника
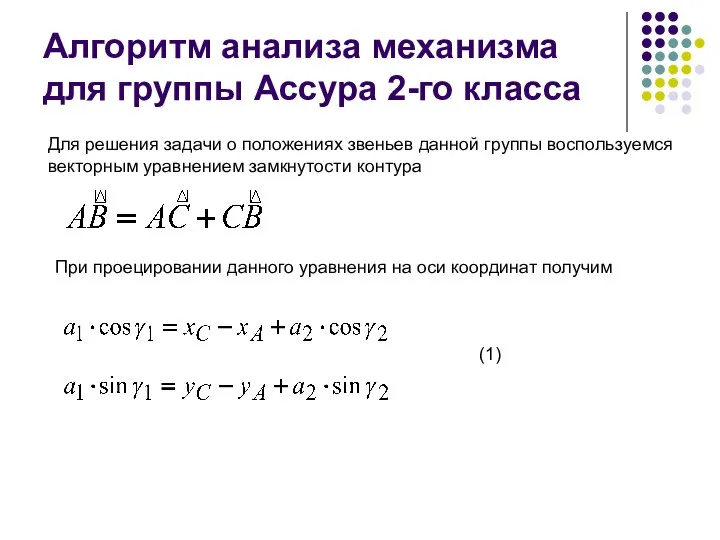
- 20. Алгоритм анализа механизма для группы Ассура 2-го класса Для решения задачи о положениях звеньев данной группы
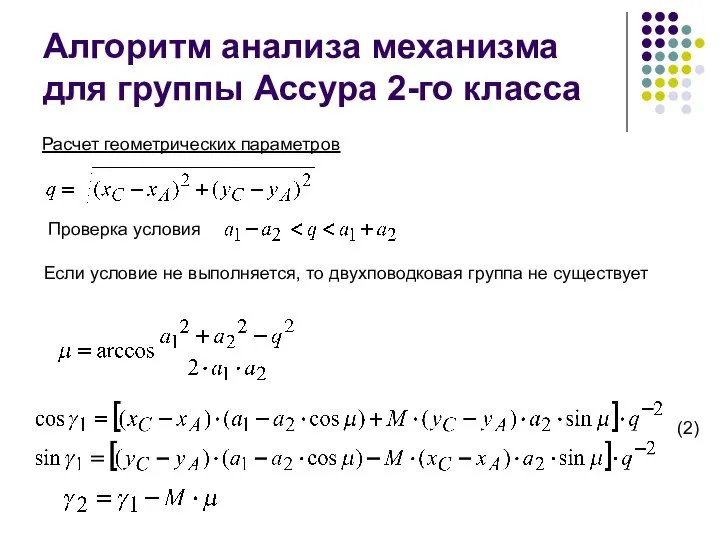
- 21. Алгоритм анализа механизма для группы Ассура 2-го класса Расчет геометрических параметров Проверка условия Если условие не
- 23. Скачать презентацию
Основные задачи кинематического анализа механизмов
Определение положений звеньев, включая и определение траекторий
Основные задачи кинематического анализа механизмов
Определение положений звеньев, включая и определение траекторий
Кинематический анализ состоит в определении движения звеньев механизма по заданному движению
Кинематический анализ состоит в определении движения звеньев механизма по заданному движению
Методы кинематического анализа
Графический
Графо-аналитический
Аналитический
Методы кинематического анализа
Графический
Графо-аналитический
Аналитический
Графические методы
Графические методы основаны на непосредственном построении траекторий движения наиболее характерных
Графические методы
Графические методы основаны на непосредственном построении траекторий движения наиболее характерных
Графоаналитические методы
К графоаналитическим методам относят методы построения планов скоростей и ускорений
Графоаналитические методы
К графоаналитическим методам относят методы построения планов скоростей и ускорений
Свойства планов скоростей и ускорений
Планом скоростей (ускорений) механизма называется чертеж, на
Свойства планов скоростей и ускорений
Планом скоростей (ускорений) механизма называется чертеж, на
Аналитические методы
Метод преобразования координат (метод Ю.Ф.Морошкина)
Метод замкнутого векторного контура (метод В.А.Зиновьева)
Аналитические методы
Метод преобразования координат (метод Ю.Ф.Морошкина)
Метод замкнутого векторного контура (метод В.А.Зиновьева)
Понятия и определения
Функция положения - это аналитическая зависимость положения или координаты
Понятия и определения
Функция положения - это аналитическая зависимость положения или координаты
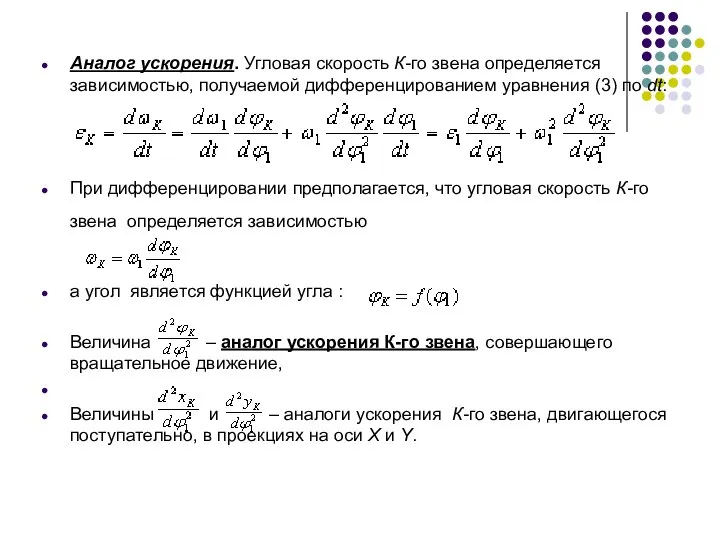
Аналог ускорения. Угловая скорость К-го звена определяется зависимостью, получаемой дифференцированием уравнения
Аналог ускорения. Угловая скорость К-го звена определяется зависимостью, получаемой дифференцированием уравнения
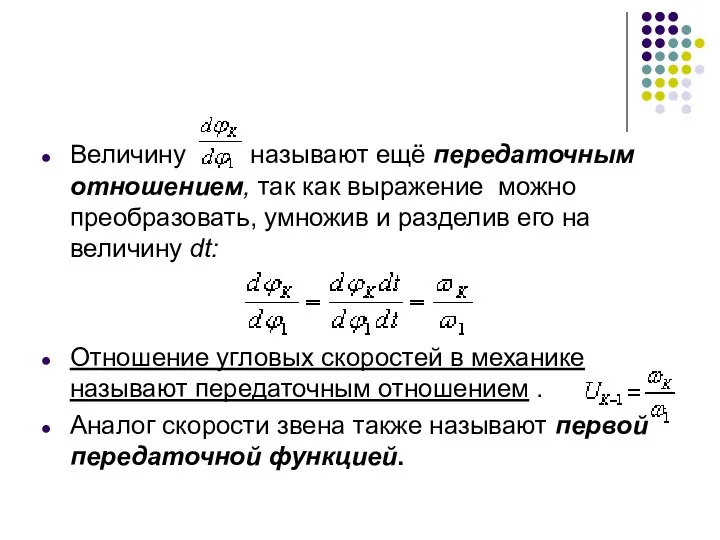
Величину называют ещё передаточным отношением, так как выражение можно преобразовать, умножив
Величину называют ещё передаточным отношением, так как выражение можно преобразовать, умножив
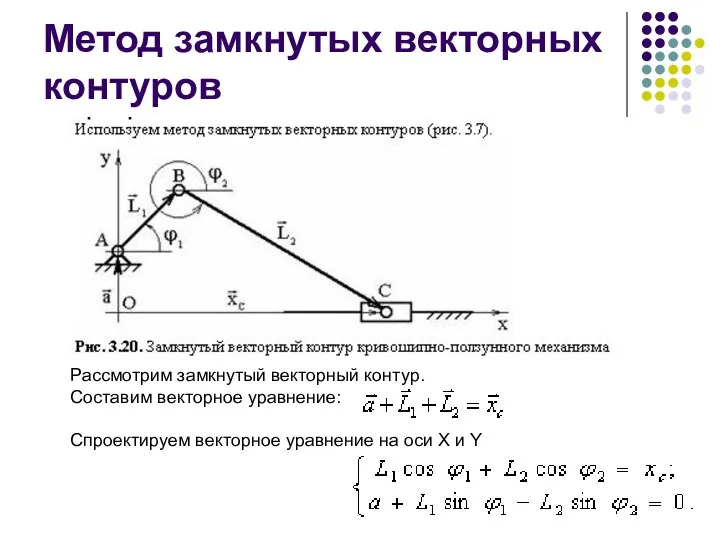
Метод замкнутых векторных контуров
Рассмотрим замкнутый векторный контур.
Составим векторное уравнение:
Спроектируем векторное уравнение
Метод замкнутых векторных контуров
Рассмотрим замкнутый векторный контур.
Составим векторное уравнение:
Спроектируем векторное уравнение
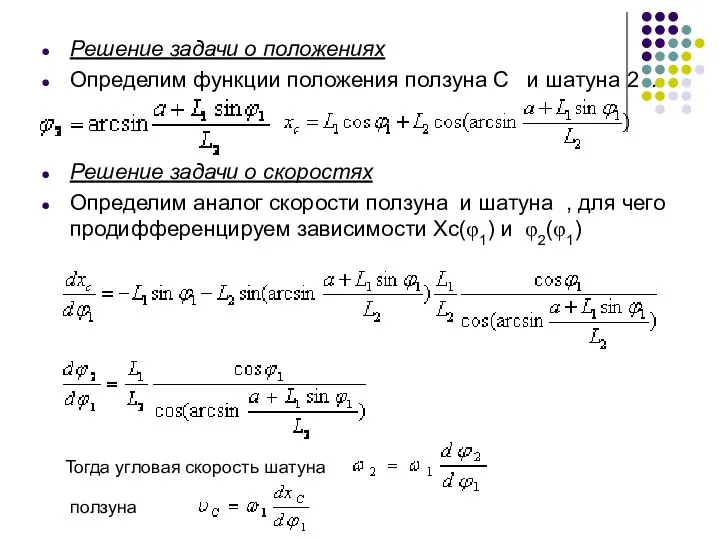
Решение задачи о положениях
Определим функции положения ползуна C и шатуна 2
Решение задачи о положениях
Определим функции положения ползуна C и шатуна 2
Алгоритмический метод векторного анализа
Кинематический анализ механизма ведется в следующем порядке: сначала
Алгоритмический метод векторного анализа
Кинематический анализ механизма ведется в следующем порядке: сначала
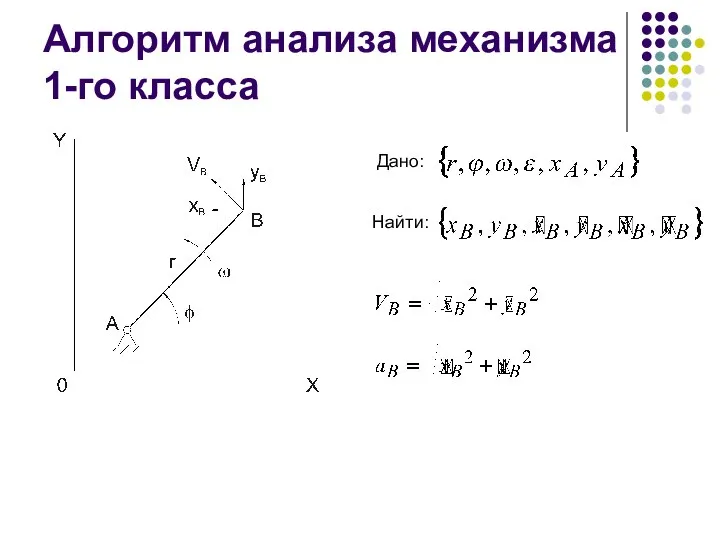
Алгоритм анализа механизма 1-го класса
Дано:
Найти:
Алгоритм анализа механизма 1-го класса
Дано:
Найти:
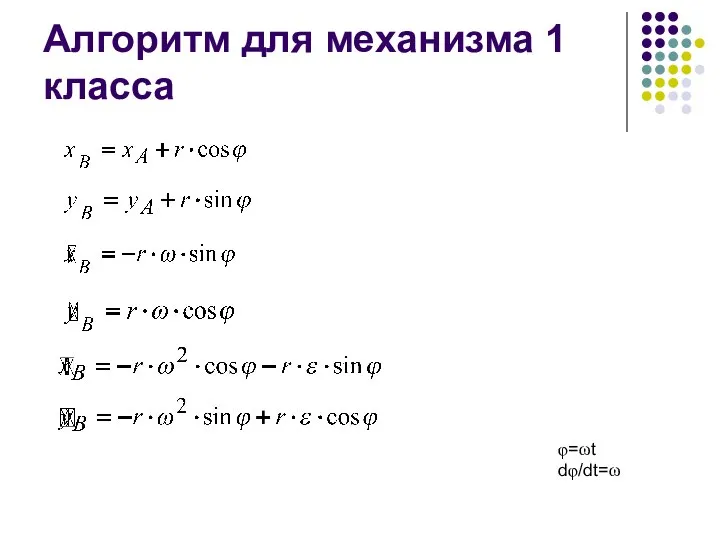
Алгоритм для механизма 1 класса
φ=ωt
dφ/dt=ω
Алгоритм для механизма 1 класса
φ=ωt
dφ/dt=ω
Алгоритм анализа механизма для группы Ассура 2-го класса
Будем считать М=-1,
если при
Алгоритм анализа механизма для группы Ассура 2-го класса
Будем считать М=-1,
если при
Алгоритм анализа механизма для группы Ассура 2-го класса
Для решения задачи о
Алгоритм анализа механизма для группы Ассура 2-го класса
Для решения задачи о
Алгоритм анализа механизма для группы Ассура 2-го класса
Расчет геометрических параметров
Проверка условия
Если
Алгоритм анализа механизма для группы Ассура 2-го класса
Расчет геометрических параметров
Проверка условия
Если
 ЕСТЕСТВОЗНАНИЕ И НКН НКН – целостная система взглядов и представлений на общие свойства и закономерности природы, выраженная в
ЕСТЕСТВОЗНАНИЕ И НКН НКН – целостная система взглядов и представлений на общие свойства и закономерности природы, выраженная в  Агротуризм. Многофункциональный проект. ООО «Ясень»
Агротуризм. Многофункциональный проект. ООО «Ясень» ММА. What is UFC
ММА. What is UFC Актуальные конференции
Актуальные конференции Я люблю спорт
Я люблю спорт Летняя практика. Часть 4. Массивы
Летняя практика. Часть 4. Массивы Платформа «Центр управления M2M»
Платформа «Центр управления M2M» Презентация Маркетинговые исследования
Презентация Маркетинговые исследования Силурийский период 443 млн.л.н. – 416 млн.л.н.
Силурийский период 443 млн.л.н. – 416 млн.л.н. Монолитные ребристые перекрытия
Монолитные ребристые перекрытия Тема 9. Бюджетная система
Тема 9. Бюджетная система Droga Krzyżowa z Janem Pawłem II
Droga Krzyżowa z Janem Pawłem II Методология и методы педагогических исследований
Методология и методы педагогических исследований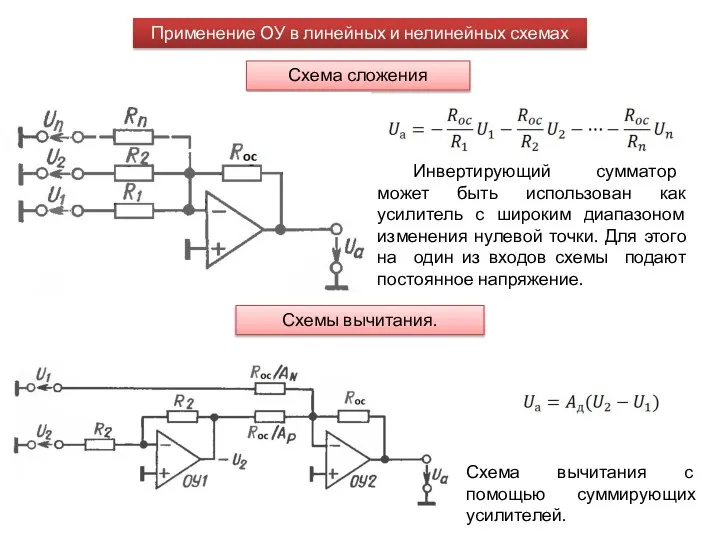 Применение ОУ в линейных и нелинейных схемах. СА1 лекция 7
Применение ОУ в линейных и нелинейных схемах. СА1 лекция 7 Формы и типы государств. Лекция № 3
Формы и типы государств. Лекция № 3 Программа «БОНУС-ЭКСПРЕС» Предложение для потенциальных потребителей
Программа «БОНУС-ЭКСПРЕС» Предложение для потенциальных потребителей Административная, военная, церковная, налоговая реформы Петра Великого
Административная, военная, церковная, налоговая реформы Петра Великого Народы Норвегии
Народы Норвегии  Политический режим
Политический режим Сети центров общения «Надежда». Новый формат сотрудничества на условиях франчайзинга
Сети центров общения «Надежда». Новый формат сотрудничества на условиях франчайзинга Церковь и государство в XVI веке
Церковь и государство в XVI веке Generic Collections Java Core
Generic Collections Java Core Правовое положение учреждений Никитенко Екатерина Медянкин Павел
Правовое положение учреждений Никитенко Екатерина Медянкин Павел  Лингвистическая экспертиза
Лингвистическая экспертиза Глюконеогенез
Глюконеогенез Развитие программирования. Платформа .NET (C#, Лекция 1)
Развитие программирования. Платформа .NET (C#, Лекция 1) Необходимость обучения плаванию в рамках занятий физической культурой
Необходимость обучения плаванию в рамках занятий физической культурой Несие алуға қажетті құжаттар
Несие алуға қажетті құжаттар