- ТСС РНП – Радионавигационные приборы РЛС -Радиолокационное оборудование

Содержание
- 2. Введение. Цели и задачи курса Радионавигационные системы и устройства в судовождении Радионавигационные системы ближнего и дальнего
- 3. РАДАР (radar – radio detection and ranging – радиообнаружение и определение расстояния) История возникновения РЛС 1895
- 4. История возникновения РЛС 1945-47 - РЛС «Гюйс-М» испытана на т/х «Грибоедов» БМП; 1947-49 - РЛС «Зарница»
- 5. Назначение и использование РЛС Назначение - Судовая (устанавливается на судах) навигационная РЛС предназначена для обнаружения радиолокационных
- 6. Судовые и береговые РЛС Судовые РЛС РЛС f = 9,41 ± 0,03 ГГц ; (λ0 =3,19
- 7. Принцип функционирования РЛС Принцип зондирования Электромагнитная СВЧ энергия вырабатывается передатчиком, последовательность работы которого определяет синхронизатор, через
- 8. Основные узлы РЛС Передатчик - подмодулятор, модулятор, магнетрон; Приемник - супергетеродинный приемник с амплитудным детектором с
- 9. Особенности размещения на судне Основной индикатор - в ходовой рубке; Дополнительный индикатор – ближе к штурманской;
- 10. Виды морских целей Деление целей по расположению в пространстве: космические; воздушные; наземные; надводные. по происхождению: естественные;
- 11. Отражающие свойства объектов ЭПР уголкового отражателя (сторона 43 см) примерно 149 кв.м; ЭПР катера высотой 4
- 12. Рефракция атмосферы Стандартная рефракция Субрефракция
- 13. Рефракция атмосферы Супер-рефракция Сверхрефракция
- 14. Измерение дальности Неподвижные кольца дальности (НКД) - грубая оценка дальности до цели. Подвижное кольцо дальности (ПКД)
- 15. Измерение направлений Механический визир отсчета направлений (МВН) Электронный визир отсчета направлений (ЭВН) Отсчет от: отметки курса
- 16. Ориентация изображений «Курс- HEAD UP» - влияние рысканий курса судна «Север - NORTH UP» - согласование
- 18. Скачать презентацию
Введение. Цели и задачи курса
Радионавигационные системы и устройства в судовождении
Радионавигационные
Введение. Цели и задачи курса
Радионавигационные системы и устройства в судовождении
Радионавигационные

РАДАР (radar – radio detection and ranging – радиообнаружение и определение
РАДАР (radar – radio detection and ranging – радиообнаружение и определение

История возникновения РЛС
1945-47 - РЛС «Гюйс-М» испытана на т/х «Грибоедов» БМП;
1947-49
История возникновения РЛС
1945-47 - РЛС «Гюйс-М» испытана на т/х «Грибоедов» БМП;
1947-49

Назначение и использование РЛС
Назначение - Судовая (устанавливается на судах) навигационная РЛС
Назначение и использование РЛС
Назначение - Судовая (устанавливается на судах) навигационная РЛС

Судовые и береговые РЛС
Судовые РЛС
РЛС f = 9,41 ± 0,03
Судовые и береговые РЛС
Судовые РЛС
РЛС f = 9,41 ± 0,03

Принцип функционирования РЛС
Принцип зондирования
Электромагнитная СВЧ энергия вырабатывается передатчиком, последовательность работы
Принцип функционирования РЛС
Принцип зондирования
Электромагнитная СВЧ энергия вырабатывается передатчиком, последовательность работы
Основные узлы РЛС
Передатчик - подмодулятор, модулятор, магнетрон;
Приемник - супергетеродинный приемник с
Основные узлы РЛС
Передатчик - подмодулятор, модулятор, магнетрон;
Приемник - супергетеродинный приемник с
Особенности размещения на судне
Основной индикатор - в ходовой рубке;
Дополнительный индикатор –
Особенности размещения на судне
Основной индикатор - в ходовой рубке;
Дополнительный индикатор –

Виды морских целей
Деление целей
по расположению в пространстве:
космические;
воздушные;
наземные;
надводные.
по происхождению:
естественные;
искуственные.
Морские цели (надводные и
Виды морских целей
Деление целей
по расположению в пространстве:
космические;
воздушные;
наземные;
надводные.
по происхождению:
естественные;
искуственные.
Морские цели (надводные и

Отражающие свойства объектов
ЭПР уголкового отражателя (сторона 43 см) примерно 149 кв.м;
ЭПР
Отражающие свойства объектов
ЭПР уголкового отражателя (сторона 43 см) примерно 149 кв.м;
ЭПР
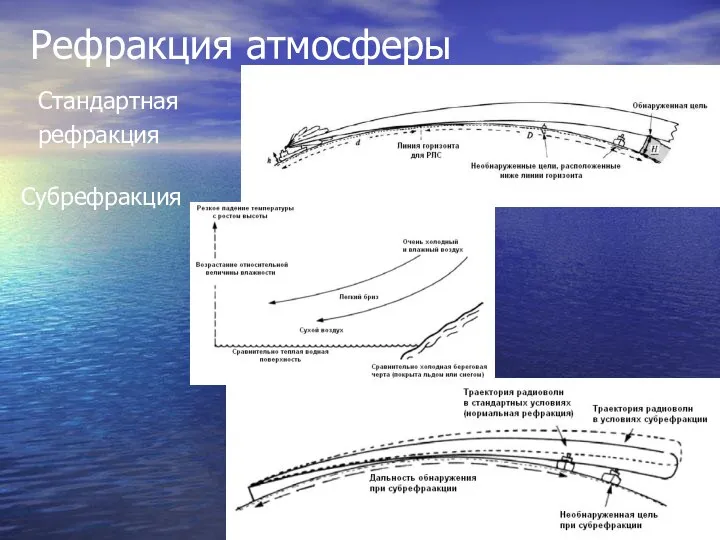
Рефракция атмосферы
Стандартная
рефракция
Субрефракция
Рефракция атмосферы
Стандартная
рефракция
Субрефракция

Рефракция атмосферы
Супер-рефракция
Сверхрефракция
Рефракция атмосферы
Супер-рефракция
Сверхрефракция

Измерение дальности
Неподвижные кольца дальности (НКД) - грубая оценка дальности до цели.
Подвижное
Измерение дальности
Неподвижные кольца дальности (НКД) - грубая оценка дальности до цели.
Подвижное

Измерение направлений
Механический визир отсчета направлений (МВН)
Электронный визир отсчета направлений (ЭВН)
Отсчет
Измерение направлений
Механический визир отсчета направлений (МВН)
Электронный визир отсчета направлений (ЭВН)
Отсчет

Ориентация изображений
«Курс- HEAD UP» - влияние рысканий курса судна
«Север -
Ориентация изображений
«Курс- HEAD UP» - влияние рысканий курса судна
«Север -
 Информационные технологии
Информационные технологии Основы исламской культуры(основы мировых религиозных культур)
Основы исламской культуры(основы мировых религиозных культур) Словарная работа. Декабрь, январь, февраль.
Словарная работа. Декабрь, январь, февраль. Тебя, Господь, возвышаю я
Тебя, Господь, возвышаю я Личность и социальная среда Домашняя работа: Параграф 5 Проблему письменно Понятия выучить
Личность и социальная среда Домашняя работа: Параграф 5 Проблему письменно Понятия выучить Успенский собор во Владимире. Художественная культура средневековья
Успенский собор во Владимире. Художественная культура средневековья Управление процессом планирования
Управление процессом планирования Эмболия-2
Эмболия-2 Морской торговый регламент Выполнил студент группы Ю-104 Кравцов Дмитрий
Морской торговый регламент Выполнил студент группы Ю-104 Кравцов Дмитрий Презентация Невиновное причинение вреда – законодательная регламентация и проблемы практического определения
Презентация Невиновное причинение вреда – законодательная регламентация и проблемы практического определения ПРЕДМЕТ АКУШЕРСТВА. ИСТОРИЯ
ПРЕДМЕТ АКУШЕРСТВА. ИСТОРИЯ Курсовой проект «Проектирование процессора ЭВМ»
Курсовой проект «Проектирование процессора ЭВМ» Международная защита прав человека
Международная защита прав человека Проектирование программного обеспечения при объектном подходе
Проектирование программного обеспечения при объектном подходе Универсальные Котлы
Универсальные Котлы Постоянство скорости света
Постоянство скорости света ИГРАЕМ В КУКЛЫ Тихонова Юлия ученица 4 Б класса Руководитель: Л.И.Мельникова учитель начальных классов
ИГРАЕМ В КУКЛЫ Тихонова Юлия ученица 4 Б класса Руководитель: Л.И.Мельникова учитель начальных классов Учет готовой продукции и ее реализации предприятием
Учет готовой продукции и ее реализации предприятием Презентация "Генитивная метафора как средство усиления экспрессивности поэтического языка Тимофея Белозёрова" - скачать пре
Презентация "Генитивная метафора как средство усиления экспрессивности поэтического языка Тимофея Белозёрова" - скачать пре Открытая экономика
Открытая экономика Конструкция автомобиля. Трансмиссия
Конструкция автомобиля. Трансмиссия Реле напряжения Easy 9
Реле напряжения Easy 9 Урок на тему «Интегрированная среда разработки приложений Lazarus»
Урок на тему «Интегрированная среда разработки приложений Lazarus» Па́бло Пикассо
Па́бло Пикассо Туристическая фирма
Туристическая фирма Полный привод Audi quattro
Полный привод Audi quattro Особенности ухода за больными в послеоперационный период
Особенности ухода за больными в послеоперационный период Артамонова Нина Андреевна учитель изобразительного искусства МОУ Петропавловской СОШ
Артамонова Нина Андреевна учитель изобразительного искусства МОУ Петропавловской СОШ