- Задача о положении механизмов параллельной структуры

Содержание
- 2. Постановка задачи По заданному вектору обобщенных координат манипулятора q=(q1, q2 , ..., qN )T найти положение
- 3. Платформа Гью-Стюарта 6-3 (Робот 6-3) - обобщенные координаты - положение и ориентация платформы
- 4. Решение с помощью вычисления аналитического уравнения плоскости
- 5. Координаты шарниров основания
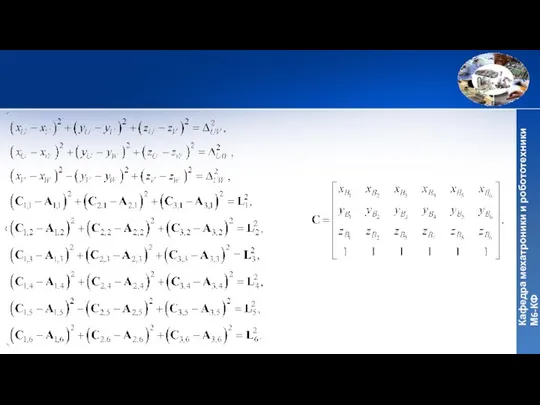
- 6. Полученная система уравнений – расстояние между шарнирами подвижной платформы – элементы вектора обобщенных координат манипулятора
- 7. Координаты вспомогательной точки: Каноническое уравнение плоскости:
- 8. Элементы матрицы поворота Направляющие косинусы оси ОZ Направляющие косинусы оси ОX
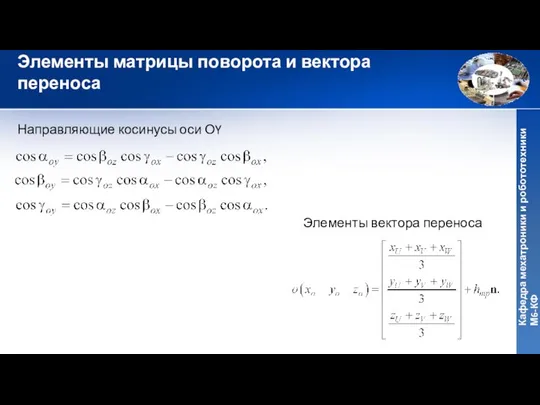
- 9. Элементы матрицы поворота и вектора переноса Направляющие косинусы оси ОY Элементы вектора переноса
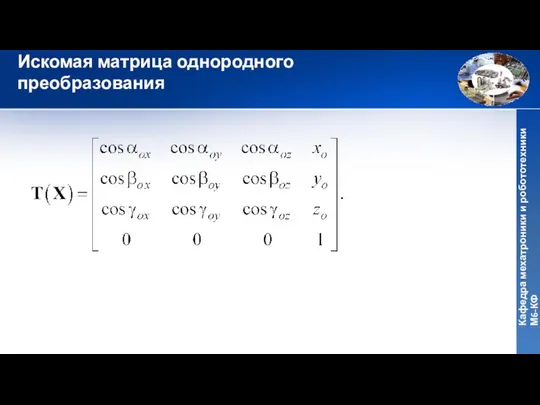
- 10. Искомая матрица однородного преобразования
- 11. Платформа Гью-Стюарта 6-6 (Робот 6-6)
- 12. Введение виртуальных точек
- 13. Координаты шарниров, выраженные через виртуальные точки Коэффициент линейной пропорциональности
- 15. Элементы матрицы поворота Направляющие косинусы оси ОZ Направляющие косинусы оси ОX
- 16. Элементы матрицы поворота и вектора переноса Направляющие косинусы оси ОY Элементы вектора переноса
- 17. Искомая матрица однородного преобразования
- 18. Моделирование движения механизма Алгоритм: Выбрать закон изменения обобщенных координат. Если закон непрерывный – дискретизировать. Для набора
- 19. Численный пример
- 21. Скачать презентацию
Постановка задачи
По заданному вектору обобщенных координат манипулятора
q=(q1, q2 , ...,
Постановка задачи
По заданному вектору обобщенных координат манипулятора
q=(q1, q2 , ...,
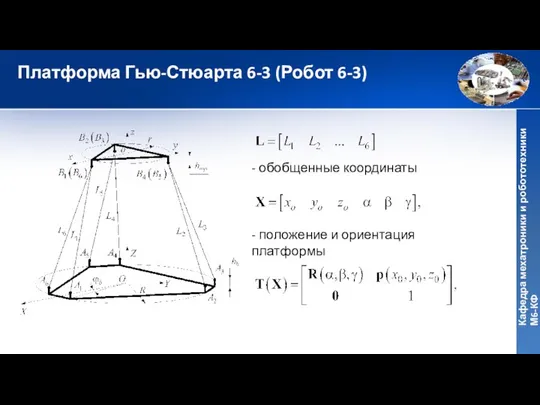
Платформа Гью-Стюарта 6-3 (Робот 6-3)
- обобщенные координаты
- положение и ориентация платформы
Платформа Гью-Стюарта 6-3 (Робот 6-3)
- обобщенные координаты
- положение и ориентация платформы
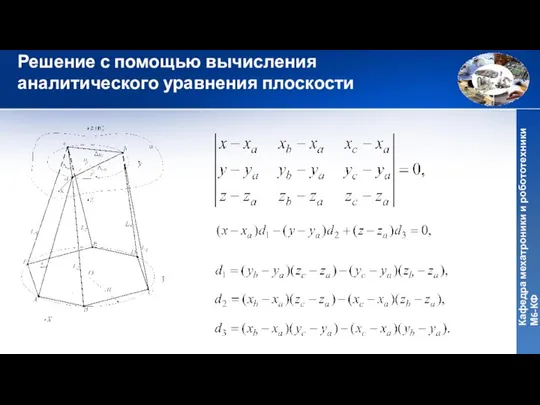
Решение с помощью вычисления аналитического уравнения плоскости
Решение с помощью вычисления аналитического уравнения плоскости
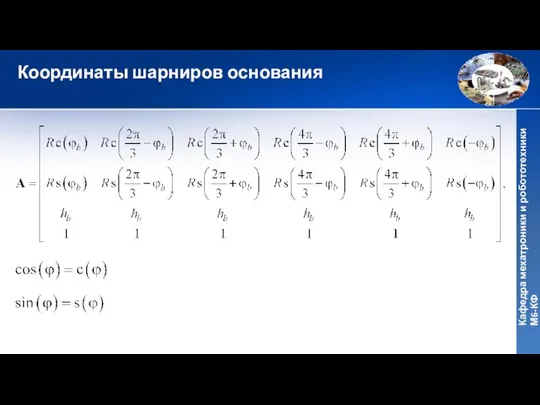
Координаты шарниров основания
Координаты шарниров основания
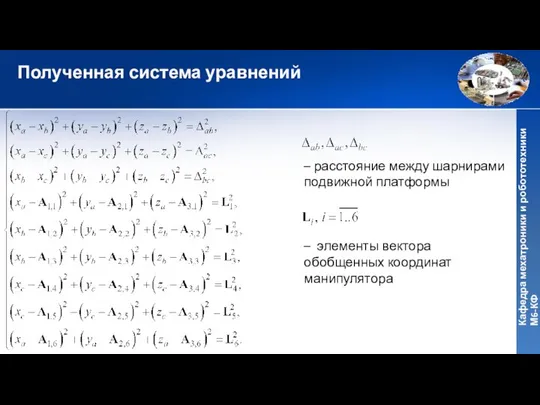
Полученная система уравнений
– расстояние между шарнирами подвижной платформы
– элементы вектора обобщенных
Полученная система уравнений
– расстояние между шарнирами подвижной платформы
– элементы вектора обобщенных
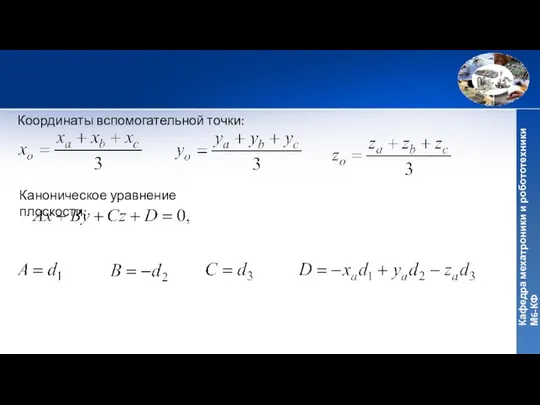
Координаты вспомогательной точки:
Каноническое уравнение плоскости:
Координаты вспомогательной точки:
Каноническое уравнение плоскости:
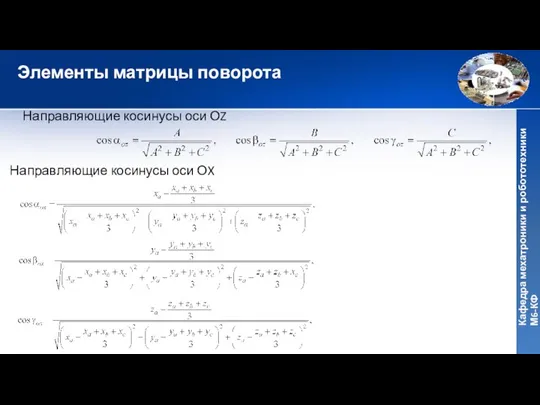
Элементы матрицы поворота
Направляющие косинусы оси ОZ
Направляющие косинусы оси ОX
Элементы матрицы поворота
Направляющие косинусы оси ОZ
Направляющие косинусы оси ОX
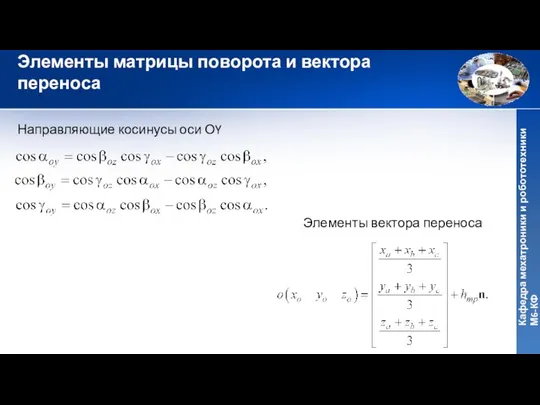
Элементы матрицы поворота и вектора переноса
Направляющие косинусы оси ОY
Элементы вектора переноса
Элементы матрицы поворота и вектора переноса
Направляющие косинусы оси ОY
Элементы вектора переноса
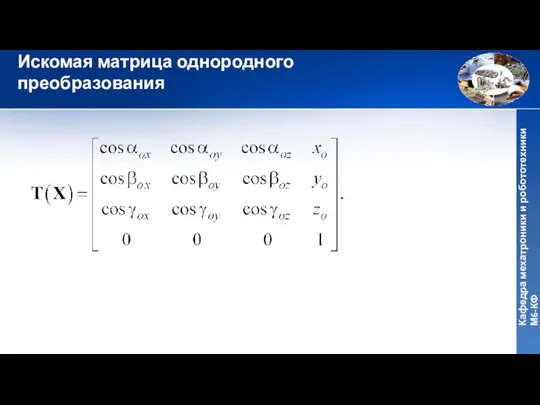
Искомая матрица однородного преобразования
Искомая матрица однородного преобразования

Платформа Гью-Стюарта 6-6 (Робот 6-6)
Платформа Гью-Стюарта 6-6 (Робот 6-6)
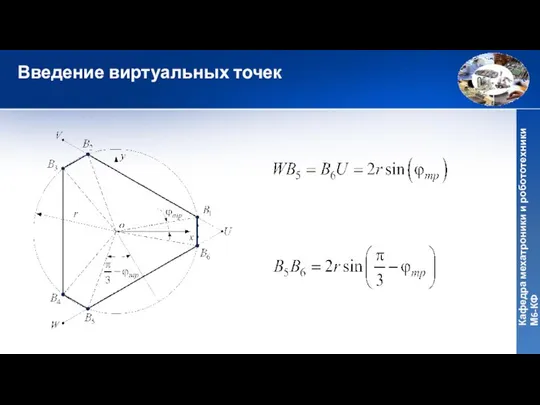
Введение виртуальных точек
Введение виртуальных точек
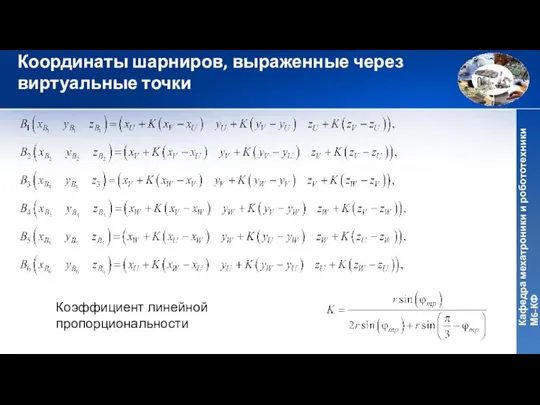
Координаты шарниров, выраженные через виртуальные точки
Коэффициент линейной пропорциональности
Координаты шарниров, выраженные через виртуальные точки
Коэффициент линейной пропорциональности

Элементы матрицы поворота
Направляющие косинусы оси ОZ
Направляющие косинусы оси ОX
Элементы матрицы поворота
Направляющие косинусы оси ОZ
Направляющие косинусы оси ОX
Элементы матрицы поворота и вектора переноса
Направляющие косинусы оси ОY
Элементы вектора переноса
Элементы матрицы поворота и вектора переноса
Направляющие косинусы оси ОY
Элементы вектора переноса
Искомая матрица однородного преобразования
Искомая матрица однородного преобразования

Моделирование движения механизма
Алгоритм:
Выбрать закон изменения обобщенных координат.
Если закон непрерывный – дискретизировать.
Для
Моделирование движения механизма
Алгоритм:
Выбрать закон изменения обобщенных координат.
Если закон непрерывный – дискретизировать.
Для
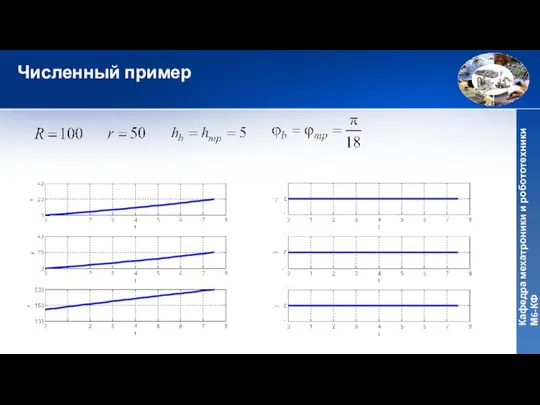
Численный пример
Численный пример
 Политическая культура и идеология. Содержание, структура и типология политической культуры
Политическая культура и идеология. Содержание, структура и типология политической культуры АЛГЕБРА 11 КЛАСС Готовимся к ЕГЭ !
АЛГЕБРА 11 КЛАСС Готовимся к ЕГЭ ! 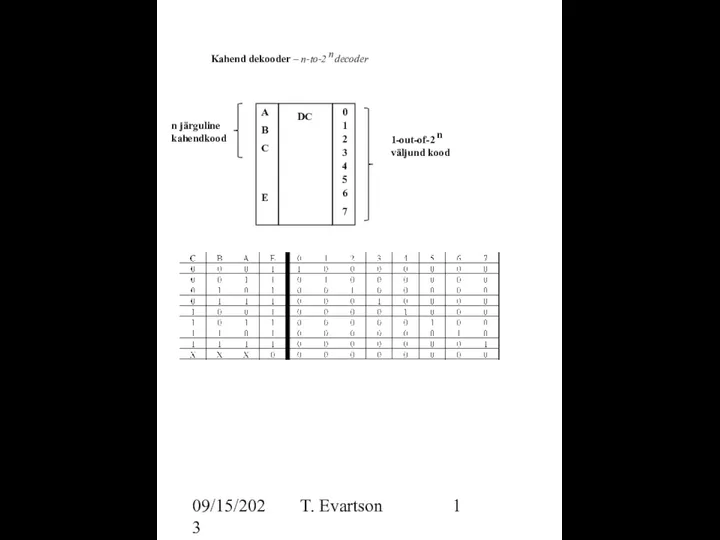 Dekooder
Dekooder Политико-психологические аспекты национального характера, национального сознания и национального самосознания
Политико-психологические аспекты национального характера, национального сознания и национального самосознания Доставка Вифлеемского огня 2017
Доставка Вифлеемского огня 2017 Тест
Тест  Программа муниципального конкурса «Учитель года - 2011» «В мастерстве учителя – успех ребенка»
Программа муниципального конкурса «Учитель года - 2011» «В мастерстве учителя – успех ребенка» Оборудование автоматизации для дома, здания. HDL
Оборудование автоматизации для дома, здания. HDL ФЛАГ и ДЖЕМ
ФЛАГ и ДЖЕМ Формирование интереса к физической культуре у младших школьников во внеурочной деятельности
Формирование интереса к физической культуре у младших школьников во внеурочной деятельности Teenger 最新修改 (Урок 1 по китайскому)
Teenger 最新修改 (Урок 1 по китайскому) Разработка наступательных стратегий для сохранения конкурентоспособности
Разработка наступательных стратегий для сохранения конкурентоспособности Суффиксы в русском языке
Суффиксы в русском языке Тенденции развития студенческого спорта РЭУ им. Г.В. Плеханова
Тенденции развития студенческого спорта РЭУ им. Г.В. Плеханова Оценка качества
Оценка качества СЕРДЕЧНО-СОСУДИСТАЯ СИСТЕМА
СЕРДЕЧНО-СОСУДИСТАЯ СИСТЕМА Потребности человека Потребности – это малоуправляемые побудители действий; состояние живого существа, выражающие зависимос
Потребности человека Потребности – это малоуправляемые побудители действий; состояние живого существа, выражающие зависимос Казахстанско – Российский медицинский университет ВК – II Кафедра пропедевтики внутренних болезней и сестринского дела Алгоритм
Казахстанско – Российский медицинский университет ВК – II Кафедра пропедевтики внутренних болезней и сестринского дела Алгоритм Гаргантюа и Пантагрюэль ч2 - презентация для начальной школы
Гаргантюа и Пантагрюэль ч2 - презентация для начальной школы Глиняная игрушка Белогорья Выполнила: Рощупкина Анастасия, 8-Б кл. Руководитель : Афанасенко Валентина
Глиняная игрушка Белогорья Выполнила: Рощупкина Анастасия, 8-Б кл. Руководитель : Афанасенко Валентина Промышленные партнеры и практики студентов
Промышленные партнеры и практики студентов Презентация "Балет 20 века" - скачать презентации по МХК
Презентация "Балет 20 века" - скачать презентации по МХК Коррупция
Коррупция Виктор Астафьев
Виктор Астафьев 29 ноября - День матери
29 ноября - День матери Этнопсихологическая школа. Типы культур
Этнопсихологическая школа. Типы культур МСБО 21 (переглянутий у 1993 р.) Вплив змін валютних курсів
МСБО 21 (переглянутий у 1993 р.) Вплив змін валютних курсів  Создание web-сайта для предприятия ООО «Русские Дороги»
Создание web-сайта для предприятия ООО «Русские Дороги»