- Захватные устройства

Содержание
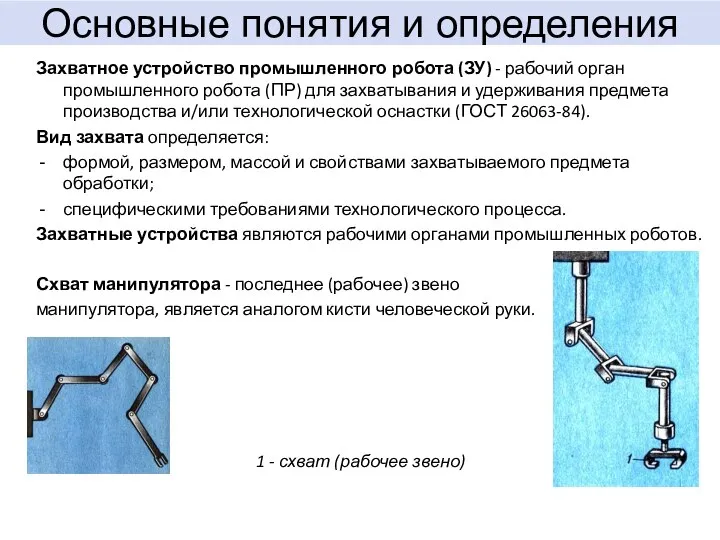
- 2. Основные понятия и определения Захватное устройство промышленного робота (ЗУ) - рабочий орган промышленного робота (ПР) для
- 3. Движения манипулятора
- 4. Совместные перемещения звеньев манипулятора Криволинейная пространственная траектория сложной формы, описываемая схватом
- 5. Требования к захватным устройствам К захватным устройствам ПР предъявляются требования общего характера и специальные, связанные с
- 6. Требования к захватным устройствам (продолжение) Стандарт СТ СЭВ 5460-85 «Роботы промышленные. Устройства захватные. Типы, номенклатура основных
- 7. Структура захватных устройств Общая структура захватных устройств
- 8. Структура захватных устройств (продолжение) Основные элементы ЗУ: соединительные фланцы; силовые приводы или устройства преобразования энергии в
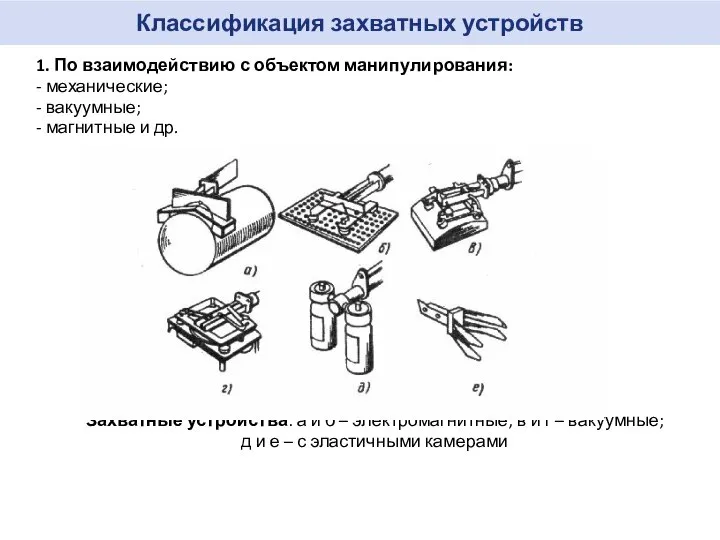
- 9. Классификация захватных устройств 1. По взаимодействию с объектом манипулирования: - механические; - вакуумные; - магнитные и
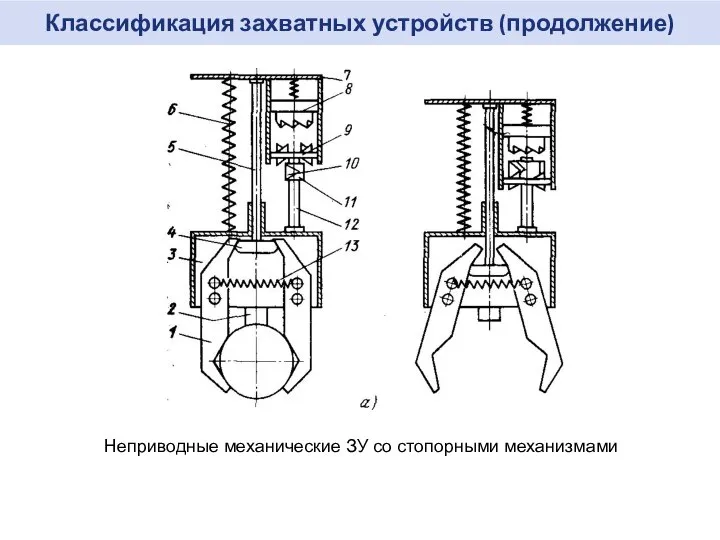
- 10. Классификация захватных устройств (продолжение) Неприводные механические ЗУ со стопорными механизмами
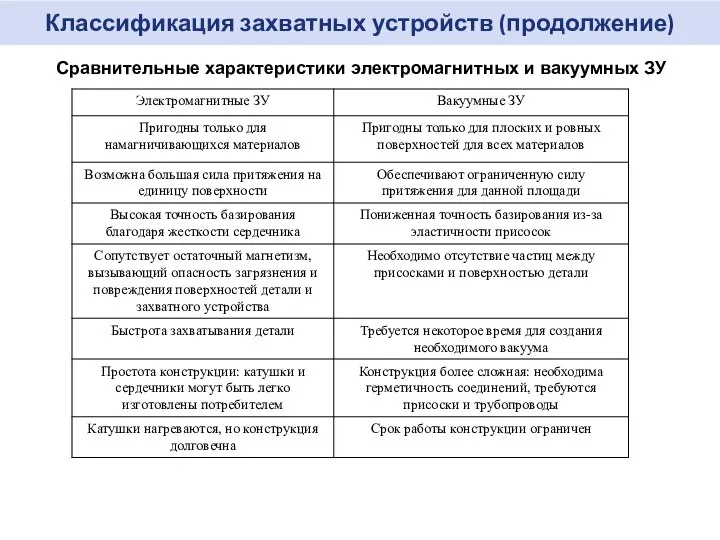
- 11. Классификация захватных устройств (продолжение) Сравнительные характеристики электромагнитных и вакуумных ЗУ
- 12. Классификация захватных устройств (продолжение) 2. В зависимости от вида контакта рабочего элемента с объектом манипулирования: -
- 13. Классификация захватных устройств (продолжение) 3. По способу ориентирования деталей: - центрирующие; - базирующие; - фиксирующие; -
- 14. Классификация захватных устройств (продолжение) 4. По числу рабочих позиций: - однопозиционные; - многопозиционные (параллельного действия, последовательного
- 15. Классификация захватных устройств (продолжение) 6. По виду управления: - неуправляемые; - командные; - жесткопрограммируемые; - адаптивные.
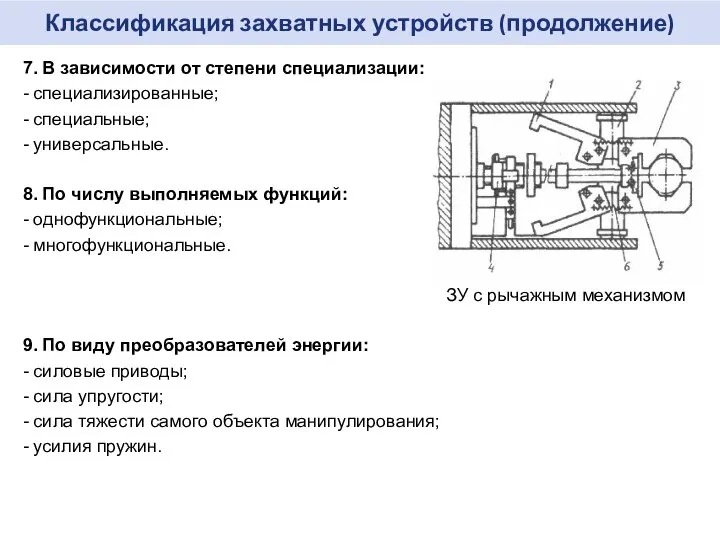
- 16. Классификация захватных устройств (продолжение) 7. В зависимости от степени специализации: - специализированные; - специальные; - универсальные.
- 17. Механические захватные устройства ПР Механические ЗУ классифицируют: 1. По типу привода (пружинные, пневматические, гидравлические, электромеханические). 2.
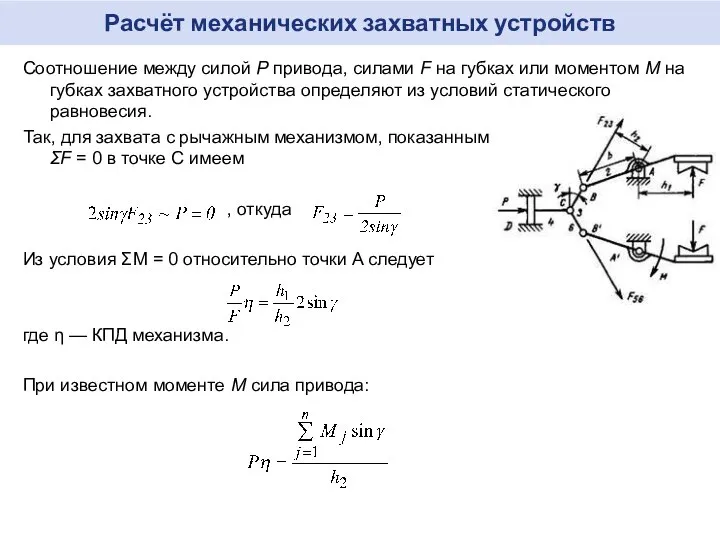
- 18. Расчёт механических захватных устройств Соотношение между силой Р привода, силами F на губках или моментом М
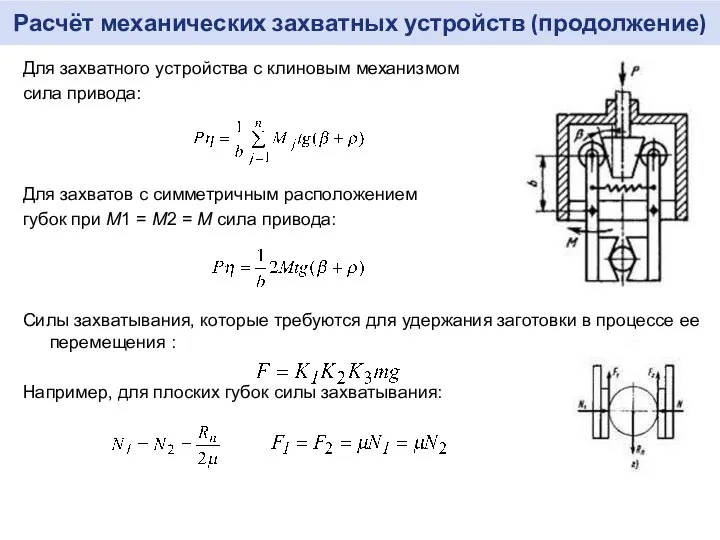
- 19. Расчёт механических захватных устройств (продолжение) Для захватного устройства с клиновым механизмом сила привода: Для захватов с
- 20. Схваты манипуляторов Схват клешнеобразной формы Надувной схват с пятью гибкими резиновыми пальцами Схваты, предназначенные для переноса
- 21. Схваты манипуляторов (продолжение) Двухпальцевый схват Трехпальцевый схват со сложной формой пальцев Немеханические схваты: магнитный (слева), с
- 22. Схваты манипуляторов (продолжение) Робот-манипулятор с рабочим инструментом в качестве выходного звена
- 23. Схваты манипуляторов (продолжение) Разнообразные конструкции манипуляторов, обусловленные особенностями их применения
- 24. Схваты манипуляторов (продолжение) Робот с двумя одинаковыми манипуляторами
- 25. Рабочие органы современных мехатронных модулей Робот ABB с пистолетом для точечной сварки Роботы Fanuc (Япония)
- 27. Скачать презентацию
Основные понятия и определения
Захватное устройство промышленного робота (ЗУ) - рабочий орган
Основные понятия и определения
Захватное устройство промышленного робота (ЗУ) - рабочий орган

Движения манипулятора
Движения манипулятора
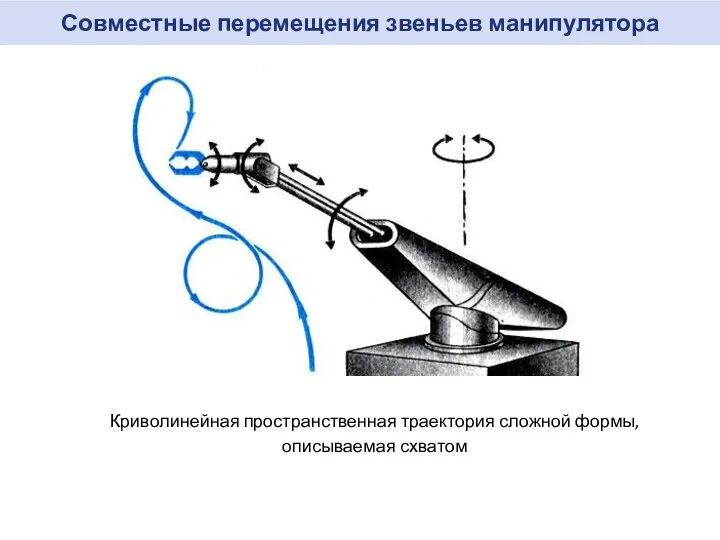
Совместные перемещения звеньев манипулятора
Криволинейная пространственная траектория сложной формы,
описываемая схватом
Совместные перемещения звеньев манипулятора
Криволинейная пространственная траектория сложной формы,
описываемая схватом
Требования к захватным устройствам
К захватным устройствам ПР предъявляются требования общего характера
Требования к захватным устройствам
К захватным устройствам ПР предъявляются требования общего характера
Требования к захватным устройствам (продолжение)
Стандарт СТ СЭВ 5460-85 «Роботы промышленные. Устройства
Требования к захватным устройствам (продолжение)
Стандарт СТ СЭВ 5460-85 «Роботы промышленные. Устройства

Структура захватных устройств
Общая структура захватных устройств
Структура захватных устройств
Общая структура захватных устройств
Структура захватных устройств (продолжение)
Основные элементы ЗУ:
соединительные фланцы;
силовые приводы или устройства преобразования
Структура захватных устройств (продолжение)
Основные элементы ЗУ:
соединительные фланцы;
силовые приводы или устройства преобразования
Классификация захватных устройств
1. По взаимодействию с объектом манипулирования:
- механические;
- вакуумные;
- магнитные
Классификация захватных устройств
1. По взаимодействию с объектом манипулирования:
- механические;
- вакуумные;
- магнитные
Классификация захватных устройств (продолжение)
Неприводные механические ЗУ со стопорными механизмами
Классификация захватных устройств (продолжение)
Неприводные механические ЗУ со стопорными механизмами
Классификация захватных устройств (продолжение)
Сравнительные характеристики электромагнитных и вакуумных ЗУ
Классификация захватных устройств (продолжение)
Сравнительные характеристики электромагнитных и вакуумных ЗУ

Классификация захватных устройств (продолжение)
2. В зависимости от вида контакта рабочего элемента
Классификация захватных устройств (продолжение)
2. В зависимости от вида контакта рабочего элемента

Классификация захватных устройств (продолжение)
3. По способу ориентирования деталей:
- центрирующие;
- базирующие;
- фиксирующие;
-
Классификация захватных устройств (продолжение)
3. По способу ориентирования деталей:
- центрирующие;
- базирующие;
- фиксирующие;
-
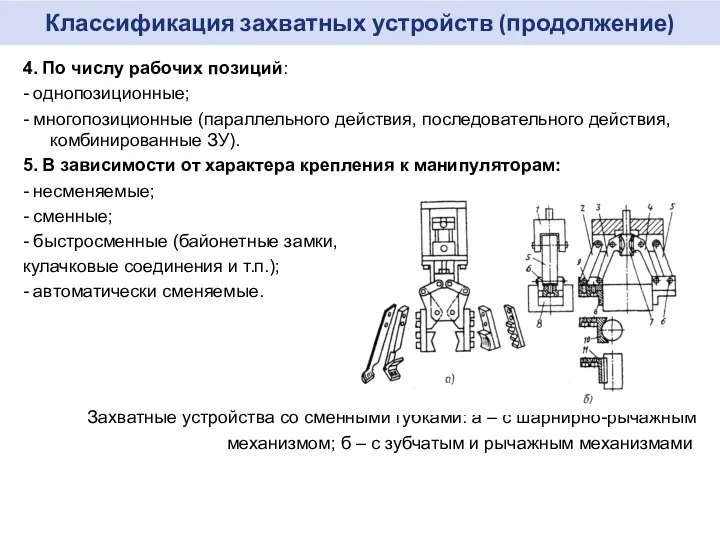
Классификация захватных устройств (продолжение)
4. По числу рабочих позиций:
- однопозиционные;
- многопозиционные (параллельного
Классификация захватных устройств (продолжение)
4. По числу рабочих позиций:
- однопозиционные;
- многопозиционные (параллельного

Классификация захватных устройств (продолжение)
6. По виду управления:
- неуправляемые;
- командные;
- жесткопрограммируемые;
- адаптивные.
Неуправляемые
Классификация захватных устройств (продолжение)
6. По виду управления:
- неуправляемые;
- командные;
- жесткопрограммируемые;
- адаптивные.
Неуправляемые
Классификация захватных устройств (продолжение)
7. В зависимости от степени специализации:
- специализированные;
-
Классификация захватных устройств (продолжение)
7. В зависимости от степени специализации:
- специализированные;
-

Механические захватные устройства ПР
Механические ЗУ классифицируют:
1. По типу привода (пружинные, пневматические,
Механические захватные устройства ПР
Механические ЗУ классифицируют:
1. По типу привода (пружинные, пневматические,
Расчёт механических захватных устройств
Соотношение между силой Р привода, силами F на
Расчёт механических захватных устройств
Соотношение между силой Р привода, силами F на
Расчёт механических захватных устройств (продолжение)
Для захватного устройства с клиновым механизмом
сила привода:
Для
Расчёт механических захватных устройств (продолжение)
Для захватного устройства с клиновым механизмом
сила привода:
Для

Схваты манипуляторов
Схват клешнеобразной формы Надувной схват с пятью гибкими
резиновыми пальцами
Схваты,
Схваты манипуляторов
Схват клешнеобразной формы Надувной схват с пятью гибкими
резиновыми пальцами
Схваты,

Схваты манипуляторов (продолжение)
Двухпальцевый схват Трехпальцевый схват со сложной формой пальцев
Немеханические схваты:
Схваты манипуляторов (продолжение)
Двухпальцевый схват Трехпальцевый схват со сложной формой пальцев
Немеханические схваты:

Схваты манипуляторов (продолжение)
Робот-манипулятор с рабочим инструментом в качестве выходного звена
Схваты манипуляторов (продолжение)
Робот-манипулятор с рабочим инструментом в качестве выходного звена

Схваты манипуляторов (продолжение)
Разнообразные конструкции манипуляторов, обусловленные
особенностями их применения
Схваты манипуляторов (продолжение)
Разнообразные конструкции манипуляторов, обусловленные
особенностями их применения

Схваты манипуляторов (продолжение)
Робот с двумя одинаковыми манипуляторами
Схваты манипуляторов (продолжение)
Робот с двумя одинаковыми манипуляторами

Рабочие органы современных мехатронных модулей
Робот ABB с пистолетом
для точечной сварки
Роботы
Рабочие органы современных мехатронных модулей
Робот ABB с пистолетом
для точечной сварки
Роботы
 Образование поверхностей и решение задач на пересечение поверхностей. (Лекция 4.2)
Образование поверхностей и решение задач на пересечение поверхностей. (Лекция 4.2) Правописание А – О в корнях ЛАГ – ЛОЖ, РАСТ – РОС. 5 КЛАСС. Урок нового материала. Учитель – Пахомова И.В.
Правописание А – О в корнях ЛАГ – ЛОЖ, РАСТ – РОС. 5 КЛАСС. Урок нового материала. Учитель – Пахомова И.В. Презентация Нефть
Презентация Нефть Цветы. Доставка
Цветы. Доставка Надзор за сооружением. Организация и проведение осмотров сооружений
Надзор за сооружением. Организация и проведение осмотров сооружений Почему бухгалтерия должна быть похожа на Вконтакте?
Почему бухгалтерия должна быть похожа на Вконтакте?  Планирование аудиторской проверки
Планирование аудиторской проверки  Менеджмент в туризме
Менеджмент в туризме Кадровая синхронизация
Кадровая синхронизация Субъекты информационного права Подготовил: Студент 3-го курса юридического факультета Сорокин А.А.
Субъекты информационного права Подготовил: Студент 3-го курса юридического факультета Сорокин А.А.  Кадровое агентство «ЭкспертПерсонал»
Кадровое агентство «ЭкспертПерсонал» Вежливость и хорошие манеры
Вежливость и хорошие манеры Что такое религия. Какие бывают религии
Что такое религия. Какие бывают религии Auf den Spuren der Russlanddeutschen
Auf den Spuren der Russlanddeutschen Сегодня мы с вами рисуем пингвина - презентация для начальной школы_
Сегодня мы с вами рисуем пингвина - презентация для начальной школы_ Адаптивный спорт
Адаптивный спорт Презентацию выполнила студентка – заочница 2 курса филологического ф – та Купчихина Елена Николаевна Владимир, 2013 год
Презентацию выполнила студентка – заочница 2 курса филологического ф – та Купчихина Елена Николаевна Владимир, 2013 год Поиск информации по ДМ. Базы данных
Поиск информации по ДМ. Базы данных Уголовно-правовая характеристика геноцида
Уголовно-правовая характеристика геноцида 5 КЛАСС
5 КЛАСС  Финансовое прогнозирование
Финансовое прогнозирование  Лекция 5 Промежуточные товарные углеводородные продукты
Лекция 5 Промежуточные товарные углеводородные продукты Решения IZDAI24 для книгоиздателей
Решения IZDAI24 для книгоиздателей Срок жизни растений - презентация для начальной школы
Срок жизни растений - презентация для начальной школы Система творческих заданий в преподавании элективных курсов Глаголева Татьяна Васильевна
Система творческих заданий в преподавании элективных курсов Глаголева Татьяна Васильевна Театр ХХ века Экспрессионизм (Германия) Футуризм (Италия
Театр ХХ века Экспрессионизм (Германия) Футуризм (Италия Определение предпочтений потребителей блокаторов кальциевых каналов
Определение предпочтений потребителей блокаторов кальциевых каналов Введение в морфологию латинского языка. Лекция №3
Введение в морфологию латинского языка. Лекция №3