- Z-передаточная функция и весовая последовательность цифрового блока. (Лекция 6)

Содержание
- 2. Согласно теореме о свертке выходная и входная последовательность связаны соотношением: Где последовательность χ[n] , которую называют
- 3. Передаточные функции цифрового регулятора, соответствующие типовым законам регулирования. В аналоговых регуляторах используются следующие типовые законы регулирования:
- 4. Z-передаточная функция цифрового ПИД-регулятора имеет вид: Преобразуя к одному знаменателю, получим: Для цифрового ПИ-регулятора Z-передаточная функция
- 6. Скачать презентацию
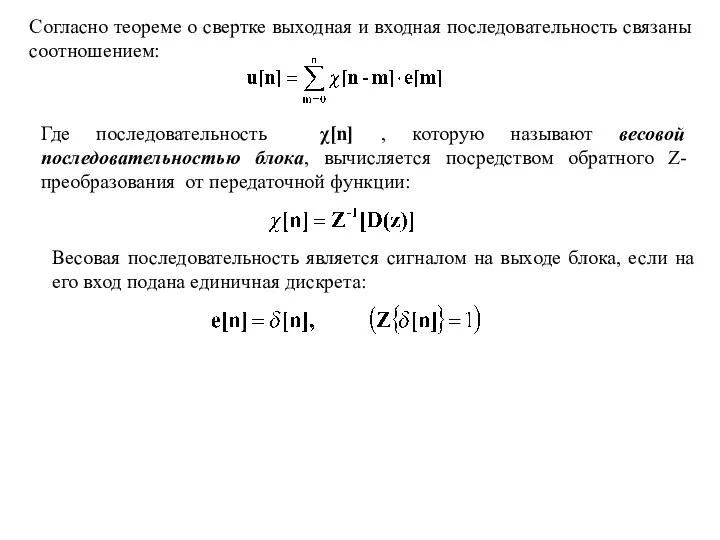
Согласно теореме о свертке выходная и входная последовательность связаны соотношением:
Где последовательность
Согласно теореме о свертке выходная и входная последовательность связаны соотношением:
Где последовательность
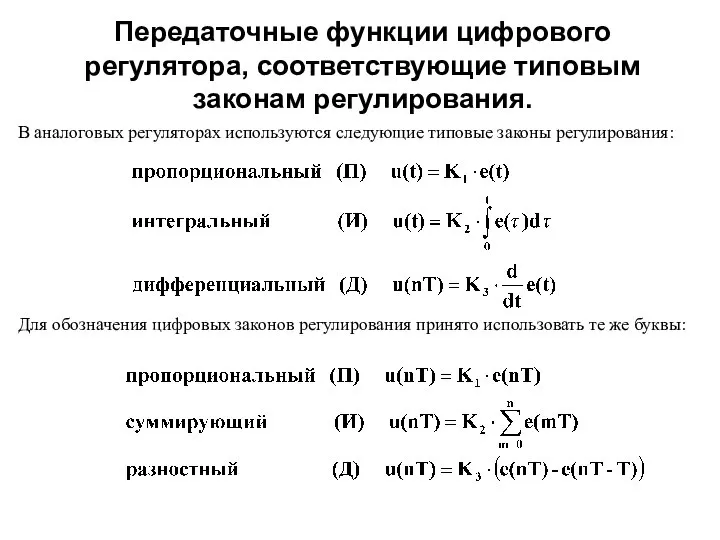
Передаточные функции цифрового регулятора, соответствующие типовым законам регулирования.
В аналоговых регуляторах используются
Передаточные функции цифрового регулятора, соответствующие типовым законам регулирования.
В аналоговых регуляторах используются
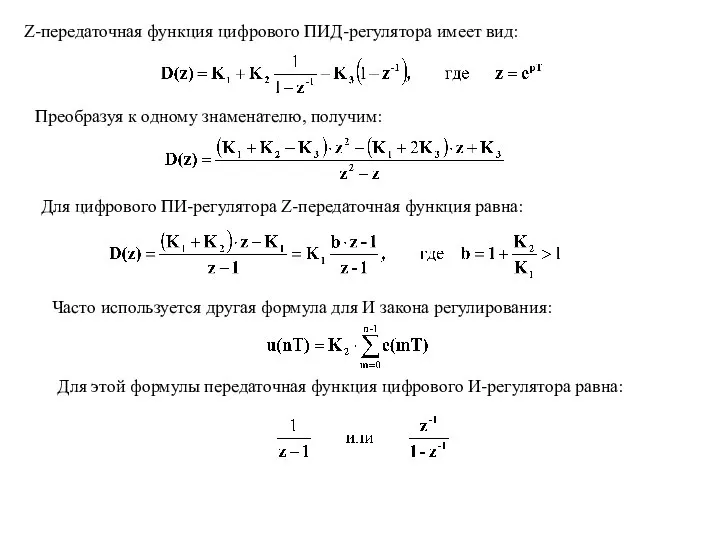
Z-передаточная функция цифрового ПИД-регулятора имеет вид:
Преобразуя к одному знаменателю, получим:
Для цифрового
Z-передаточная функция цифрового ПИД-регулятора имеет вид:
Преобразуя к одному знаменателю, получим:
Для цифрового
 Воздушные вяжущие вещества. Гипсоангидритовые вяжущие вещества. Основы процессов схватывания и твердения. (Лекция 1)
Воздушные вяжущие вещества. Гипсоангидритовые вяжущие вещества. Основы процессов схватывания и твердения. (Лекция 1) Нормирование труда Классификация затрат рабочего времени. Фонд рабочего времени. Система норм и нормативов труда. Методы нормир
Нормирование труда Классификация затрат рабочего времени. Фонд рабочего времени. Система норм и нормативов труда. Методы нормир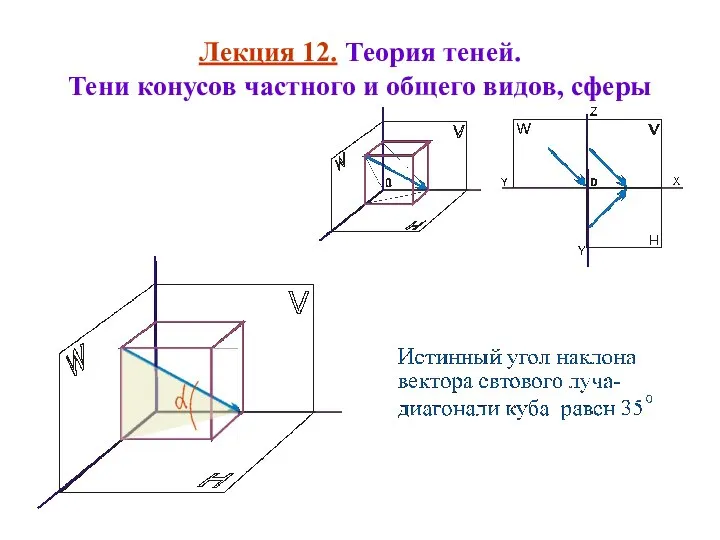 Теория теней. Тени конусов частного и общего видов, сферы. (Лекция 12)
Теория теней. Тени конусов частного и общего видов, сферы. (Лекция 12) Системы посадки сантиметрового диапазона
Системы посадки сантиметрового диапазона Программирование на языке высокого уровня. (Лекции 1, 2)
Программирование на языке высокого уровня. (Лекции 1, 2) Психология малых групп
Психология малых групп  ПРОФРАЗВИТИЕ 19
ПРОФРАЗВИТИЕ 19 География в танце. (Часть 1)
География в танце. (Часть 1) Создание графических обьектов в Word
Создание графических обьектов в Word  История религии
История религии Творчество Ломоносова
Творчество Ломоносова Синтаксический анализ языков программирования. Распознаватели. Задача разбора. (Глава 4)
Синтаксический анализ языков программирования. Распознаватели. Задача разбора. (Глава 4) Проблемы защиты права на деловую репутацию
Проблемы защиты права на деловую репутацию  Презентация Iura in re aliena, их понятие, классификация. Парциарные вещные права как res incorporales. Классификация сервитутов по Марциану
Презентация Iura in re aliena, их понятие, классификация. Парциарные вещные права как res incorporales. Классификация сервитутов по Марциану КОЛЛАГЕН
КОЛЛАГЕН Частные вопросы гигиены труда
Частные вопросы гигиены труда  Источники питания и импульсная техника
Источники питания и импульсная техника Физическая культура как социальная система
Физическая культура как социальная система Теория сейсмостойкости
Теория сейсмостойкости Житие Сергия Радонежского Фрагмент кружкового занятия в 8 классе Учителя МОУ СОШ № 19 г. Кореновска Паньковой Елены Ивановны
Житие Сергия Радонежского Фрагмент кружкового занятия в 8 классе Учителя МОУ СОШ № 19 г. Кореновска Паньковой Елены Ивановны  Хронический гепатит
Хронический гепатит  ООО «ПСТ». Комплексный подход к застройке, малоэтажное индивидуальное строительство
ООО «ПСТ». Комплексный подход к застройке, малоэтажное индивидуальное строительство Организация принятия решения на основе программно-целевых методов в ЕС
Организация принятия решения на основе программно-целевых методов в ЕС Программирование. Рекурсия
Программирование. Рекурсия Глобализация экономики
Глобализация экономики PHP. Функции. Функции, определяемые пользователем
PHP. Функции. Функции, определяемые пользователем Графика системы matlab. (Лекция 2)
Графика системы matlab. (Лекция 2) Предмет и объект психологии
Предмет и объект психологии