- Elektriskās piedziņas pārejas procesi. (№4)

Содержание
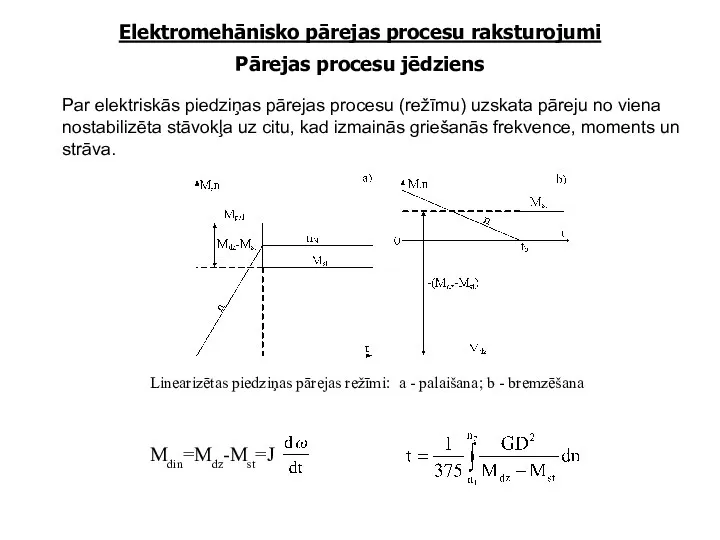
- 2. Elektromehānisko pārejas procesu raksturojumi Pārejas procesu jēdziens Par elektriskās piedziņas pārejas procesu (režīmu) uzskata pāreju no
- 3. Linearizētas elektriskās piedziņas mehānisko pārejas procesu analītiskais aprēķins kur Mk un Mst0 - dzinēja un mehānisma
- 4. - elektriskās piedziņas mehāniskā laika konstante; - nostabilizējusies griešanās frekvence. kur
- 5. kur C - integrēšanas konstante. Pie sākuma nosacījumiem, ja n=nsāk t=0, integrēšanas konstante C = nsāk
- 6. Linearizētas piedziņas griešanās frekvences izmaiņas grafiks, ja Mst = const
- 7. Piedziņas pārejas procesu aprēķins ar grafisko integrēšanu vai
- 8. Piedziņas pārejas procesa laika noteikšana izmantojot proporciju metodi
- 9. PĀREJAS PROCESI LĪDZSTRĀVAS PIEDZIŅĀ
- 10. Pārejas procesi līdzstrāvas piedziņā ar neatkarīgās ierosmes dzinēju Palaišana Līdzstrāvas neatkarīgās ierosmes dzinējs: a - vienpakāpes
- 11. kur n0 = U/cEΦ - ideālās tukšgaitas griešanās frekvence; - mehāniskā laika konstante; Δnst = MstR/cEcMΦ2
- 12. Līdzstrāvas neatkarīgās ierosmes dzinēja vienpakāpes palaišanas raksturlīknes: a - n(t); b - i(t); 1 - ar
- 13. Palaišana ar daudzpakāpju reostatu Līdzstrāvas neatkarīgās ierosmes dzinēja daudzpakāpju palaišana ar reostatiem: a -slēguma shēma; b
- 14. Laiku, kurā dzinēja enkura strāva izmainās no Ip1 līdz Ip2, nosaka pēc izteiksmes: kur tx -
- 15. Pretslēguma bremzēšana un reversēšana Līdzstrāvas neatkarīgās ierosmes dzinēja pretslēguma bremzēšanas un reversēšanas režīmi: a - slēguma
- 16. Aktīva pretestības momenta gadījumā nnost=-(n0 + Δnst), nsāk = nst un iegūst: nnost= - n0 ;
- 17. Dinamiskā bremzēšana Līdzstrāvas neatkarīgās ierosmes dzinēja dinamiskā bremzēšana: a - slēguma shēma; b - mehāniskās raksturlīknes
- 18. Dinamiskās bremzēšanas procesu raksturo vienādojumu sistēma: kur R = Ra + RT - enkura ķēdes aktīvā
- 19. Dinamiskās bremzēšanas pārejas procesa raksturlīknes: a - n = f(t) pie slodzes (1) un tukšgaitā (2);
- 20. Dzinēja enkura strāvas izmaiņu laikā dinamiskās bremzēšanas režīmā pie norādītajiem sākuma nosacījumiem apraksta izteiksme: Bremzēšanas procesa
- 22. Скачать презентацию
Elektromehānisko pārejas procesu raksturojumi
Pārejas procesu jēdziens
Par elektriskās piedziņas pārejas procesu
Elektromehānisko pārejas procesu raksturojumi
Pārejas procesu jēdziens
Par elektriskās piedziņas pārejas procesu

Linearizētas elektriskās piedziņas mehānisko pārejas
procesu analītiskais aprēķins
kur Mk un Mst0
Linearizētas elektriskās piedziņas mehānisko pārejas
procesu analītiskais aprēķins
kur Mk un Mst0

- elektriskās piedziņas mehāniskā laika konstante;
- nostabilizējusies griešanās frekvence.
kur
- elektriskās piedziņas mehāniskā laika konstante;
- nostabilizējusies griešanās frekvence.
kur
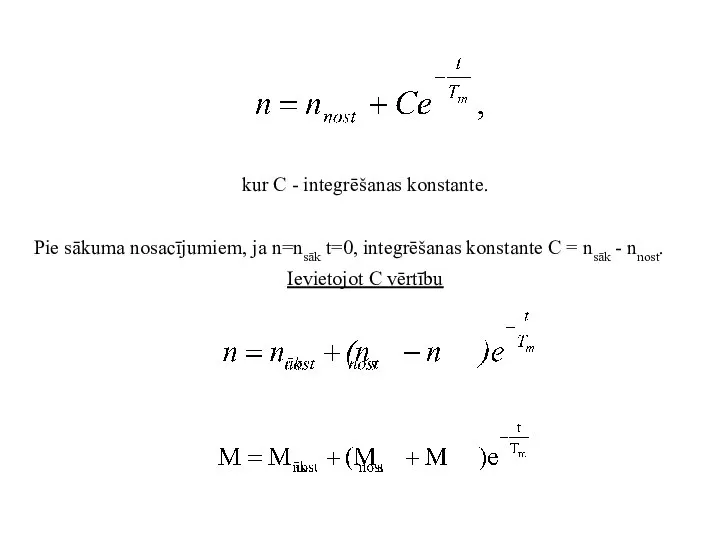
kur C - integrēšanas konstante.
Pie sākuma nosacījumiem, ja n=nsāk t=0,
kur C - integrēšanas konstante.
Pie sākuma nosacījumiem, ja n=nsāk t=0,

Linearizētas piedziņas griešanās frekvences
izmaiņas grafiks, ja Mst = const
Linearizētas piedziņas griešanās frekvences
izmaiņas grafiks, ja Mst = const

Piedziņas pārejas procesu aprēķins ar grafisko integrēšanu
vai
Piedziņas pārejas procesu aprēķins ar grafisko integrēšanu
vai

Piedziņas pārejas procesa laika noteikšana izmantojot proporciju metodi
Piedziņas pārejas procesa laika noteikšana izmantojot proporciju metodi
PĀREJAS PROCESI
LĪDZSTRĀVAS PIEDZIŅĀ
PĀREJAS PROCESI
LĪDZSTRĀVAS PIEDZIŅĀ

Pārejas procesi līdzstrāvas piedziņā ar neatkarīgās ierosmes dzinēju
Palaišana
Līdzstrāvas neatkarīgās ierosmes dzinējs:
Pārejas procesi līdzstrāvas piedziņā ar neatkarīgās ierosmes dzinēju
Palaišana
Līdzstrāvas neatkarīgās ierosmes dzinējs:
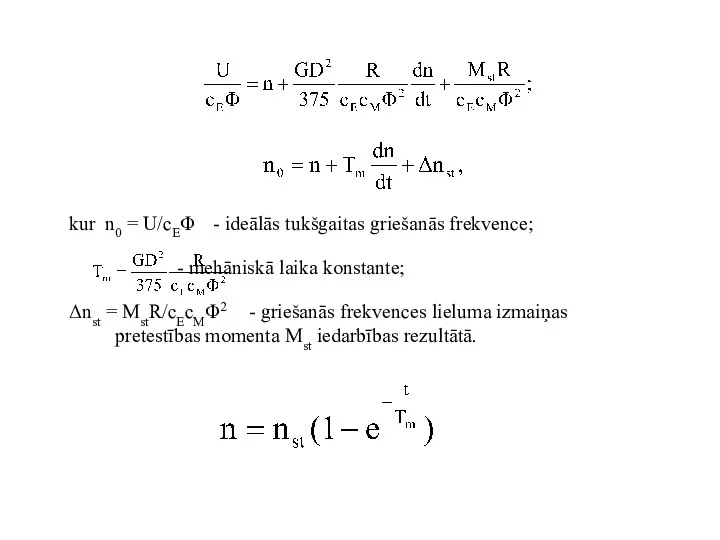
kur n0 = U/cEΦ - ideālās tukšgaitas griešanās frekvence;
- mehāniskā
kur n0 = U/cEΦ - ideālās tukšgaitas griešanās frekvence;
- mehāniskā

Līdzstrāvas neatkarīgās ierosmes dzinēja vienpakāpes palaišanas raksturlīknes:
a - n(t); b
Līdzstrāvas neatkarīgās ierosmes dzinēja vienpakāpes palaišanas raksturlīknes:
a - n(t); b

Palaišana ar daudzpakāpju reostatu
Līdzstrāvas neatkarīgās ierosmes dzinēja daudzpakāpju palaišana ar
Palaišana ar daudzpakāpju reostatu
Līdzstrāvas neatkarīgās ierosmes dzinēja daudzpakāpju palaišana ar
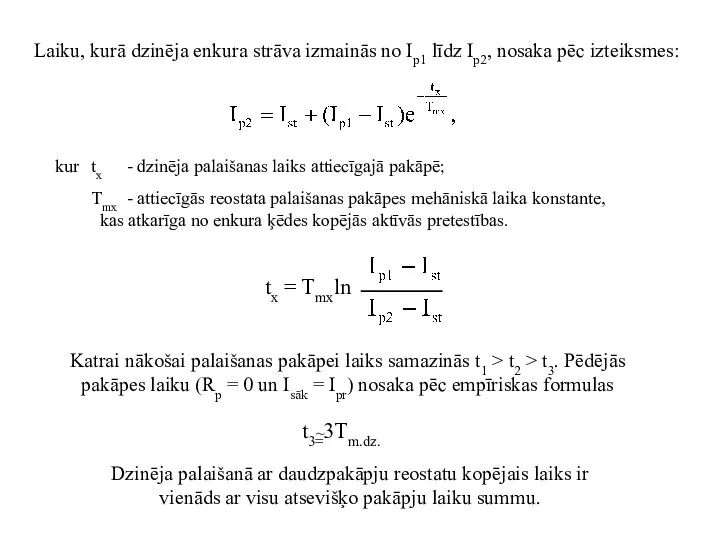
Laiku, kurā dzinēja enkura strāva izmainās no Ip1 līdz Ip2, nosaka
Laiku, kurā dzinēja enkura strāva izmainās no Ip1 līdz Ip2, nosaka
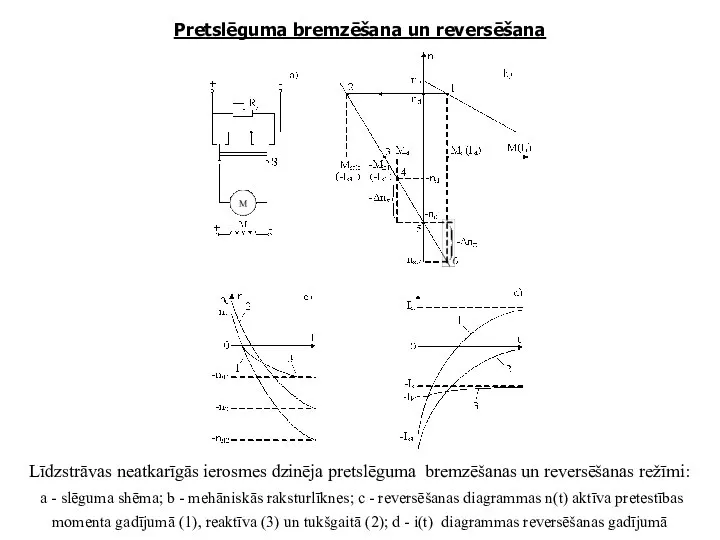
Pretslēguma bremzēšana un reversēšana
Līdzstrāvas neatkarīgās ierosmes dzinēja pretslēguma bremzēšanas un
Pretslēguma bremzēšana un reversēšana
Līdzstrāvas neatkarīgās ierosmes dzinēja pretslēguma bremzēšanas un

Aktīva pretestības momenta gadījumā nnost=-(n0 + Δnst), nsāk = nst un
Aktīva pretestības momenta gadījumā nnost=-(n0 + Δnst), nsāk = nst un

Dinamiskā bremzēšana
Līdzstrāvas neatkarīgās ierosmes dzinēja dinamiskā bremzēšana:
a - slēguma
Dinamiskā bremzēšana
Līdzstrāvas neatkarīgās ierosmes dzinēja dinamiskā bremzēšana:
a - slēguma
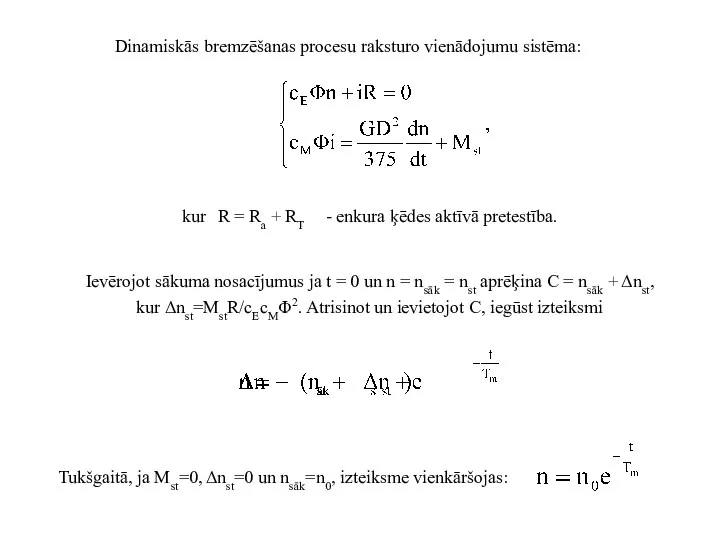
Dinamiskās bremzēšanas procesu raksturo vienādojumu sistēma:
kur R = Ra + RT
Dinamiskās bremzēšanas procesu raksturo vienādojumu sistēma:
kur R = Ra + RT

Dinamiskās bremzēšanas pārejas procesa raksturlīknes:
a - n = f(t) pie
Dinamiskās bremzēšanas pārejas procesa raksturlīknes:
a - n = f(t) pie

Dzinēja enkura strāvas izmaiņu laikā dinamiskās bremzēšanas režīmā pie norādītajiem sākuma
Dzinēja enkura strāvas izmaiņu laikā dinamiskās bremzēšanas režīmā pie norādītajiem sākuma
 Задачи на движение
Задачи на движение Разборка – сборка кривошипно шатунного механизма двигателей автомобилей ЗИЛ – 508.10, ВАЗ – 2106 и ВАЗ -21083
Разборка – сборка кривошипно шатунного механизма двигателей автомобилей ЗИЛ – 508.10, ВАЗ – 2106 и ВАЗ -21083 Вынужденные колебания. Резонанс
Вынужденные колебания. Резонанс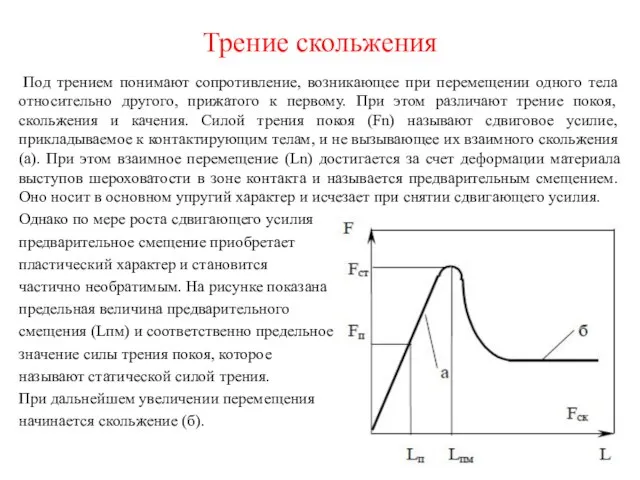 Трение скольжения
Трение скольжения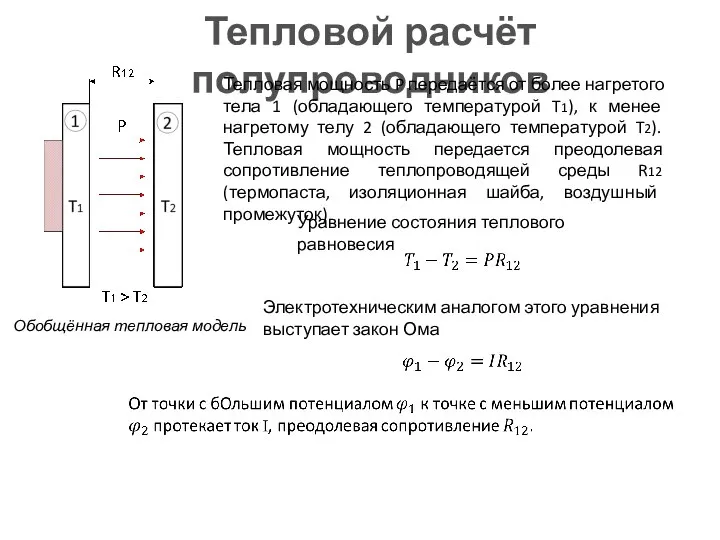 Тепловой расчет полупроводников
Тепловой расчет полупроводников Силы в природе
Силы в природе Решение задач по ядерной физике
Решение задач по ядерной физике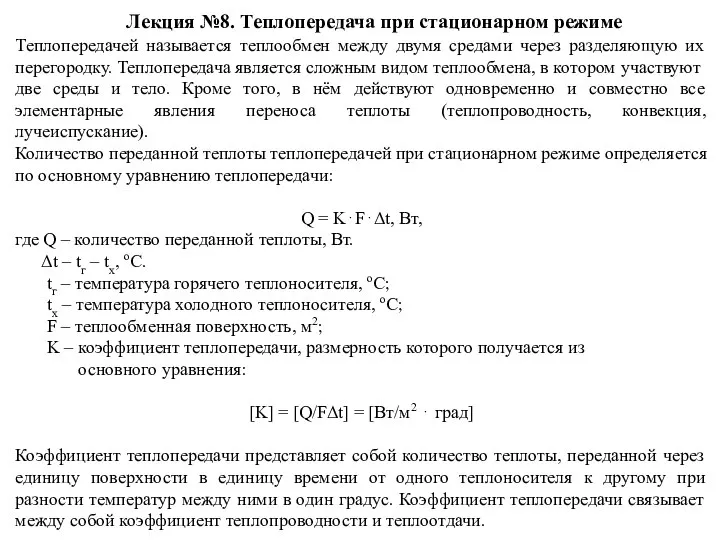 Теплопередача при стационарном режиме
Теплопередача при стационарном режиме Оптика. Предмет оптики
Оптика. Предмет оптики Кинематика. Нүкте кинематикасы. Қатты дене кинематикасы
Кинематика. Нүкте кинематикасы. Қатты дене кинематикасы Аттестационная работа. Лабораторная работа как шаг к исследованию. Определение коэффициента жесткости резинового жгута, 10 класс
Аттестационная работа. Лабораторная работа как шаг к исследованию. Определение коэффициента жесткости резинового жгута, 10 класс Содержание Атомная физика 1.Строение атома (Резерфода) 2.Модель атома водорода по Бору 3.Квантовые постулаты Бора 4.Испускание и п
Содержание Атомная физика 1.Строение атома (Резерфода) 2.Модель атома водорода по Бору 3.Квантовые постулаты Бора 4.Испускание и п Основное уравнение молекулярно-кинетической теории
Основное уравнение молекулярно-кинетической теории Управление технологическим процессом технического обслуживания и ремонта ходовой части автомобиля марки SSANGYONG
Управление технологическим процессом технического обслуживания и ремонта ходовой части автомобиля марки SSANGYONG Энергетика: Катушка Тесла
Энергетика: Катушка Тесла Курская АЭС
Курская АЭС Розрахунок опору провідника. Питомий опір речовини. Урок 46
Розрахунок опору провідника. Питомий опір речовини. Урок 46 Основные параметры метода контроля
Основные параметры метода контроля Электрические явления в природе и технике
Электрические явления в природе и технике Вектор. Дії над векторами
Вектор. Дії над векторами Звук. Звуковая шкала
Звук. Звуковая шкала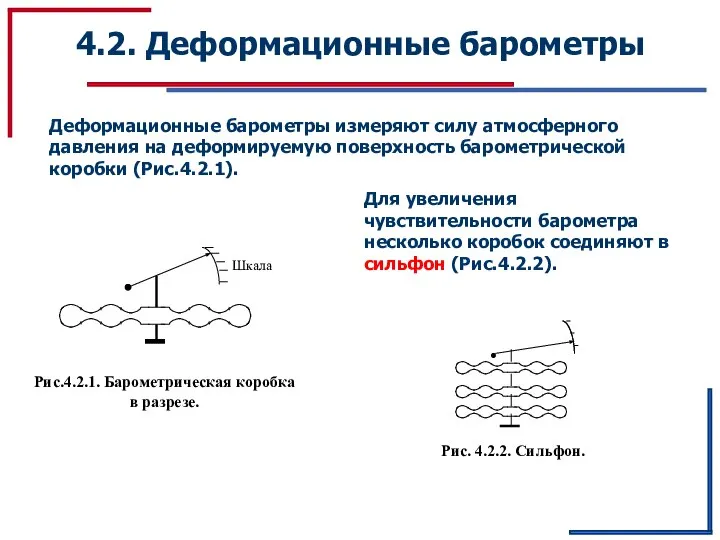 Тема4-2 Деформационные барометры
Тема4-2 Деформационные барометры Оптика Лекция 15
Оптика Лекция 15  Рычаги в быту. Работа гатауллиной амины
Рычаги в быту. Работа гатауллиной амины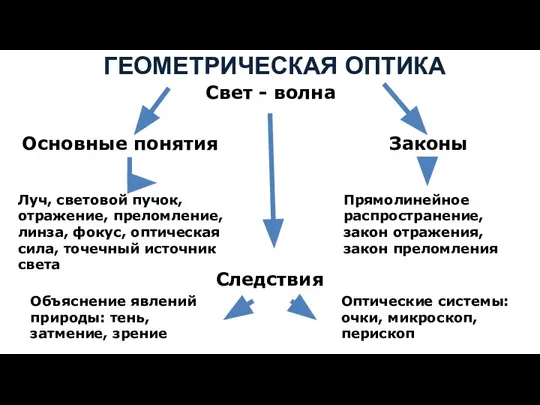 Геометрическая оптика
Геометрическая оптика Презентация по физике Таблицы по физике
Презентация по физике Таблицы по физике  Расчет сопротивления проводника. Удельное сопротивление
Расчет сопротивления проводника. Удельное сопротивление Силы в природе
Силы в природе