Физические и геологические основы сейсморазведки. Сейсмические волны в безграничной среде. (Тема 2. Лекция 3-4)
- Физические и геологические основы сейсморазведки. Сейсмические волны в безграничной среде. (Тема 2. Лекция 3-4)

Содержание
- 2. Общие понятия Однородное безграничное пространство - это наиболее простая модель среды, облегчающая рассмотрение основных исходных положений
- 3. Напряжения и деформации Процесс распространения упругих (сейсмических) волн в геологической среде это передача малых деформаций и
- 4. Если в результате деформаций произошли необратимые изменения первоначальной структуры среды, то среды и происходящие в них
- 5. Упругие деформации. Рис. 2.1. Положение частичек среды в пространстве При деформации частицы тела смещаются относительно друг
- 6. Компоненты вектора смещений в точке Q в скалярной форме (разложение Тейлора) Если смещения очень малые, то
- 7. Рисунок поясняющий смысл 9 входящих в разложение частных производных После приложения внешних нагрузок малый параллелепипед, мысленно
- 8. Выводы по анализу рисунка длина отрезка РQ возрастает на величину (ди/дх)dх, а PS - на величину
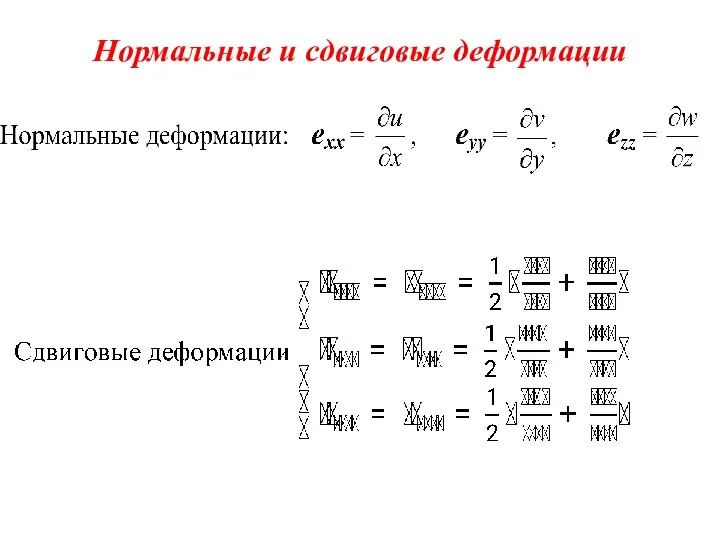
- 9. Нормальные и сдвиговые деформации
- 10. Изменение объема в расчете на единичный объем (или относительное изменение объема) называется дилатацией и обозначается θ.
- 11. Упругие напряжения Рассмотрим элементарный объем упругой среды, в котором под действием внешних сил возникли деформации. За
- 12. Напряжения, приложенные к граням бесконечно малого тетраэдра
- 13. Компоненты напряжений Аналогично определим напряжения рх, ру, рz на гранях тетраэдра, ограниченных плоскостями уОz, хОz и
- 14. В матрице первая буква в индексе определяет грань, перпендикулярную соответствующей оси, а вторая - компоненту напряжения.
- 15. Закон Гука Чтобы вычислять деформации при известных напряжениях, мы должны знать зависимость между напряжениями и деформациями.
- 16. В общем случае, каждая из шести компонент напряжений (рхх, pyy, pzz, рхy, pyz, pxz) является линейной
- 17. В изотропной среде, т. е. когда свойства не зависят от направления, упругих модулей всего два и
- 18. Упругие константы (модули) Модули Ламе быть выражены через два других широко используемых модуля модуль Юнга Е
- 19. Модулем Юнга Е называется коэффициент, который характеризует сопротивление горной породы растяжению или сжатию, например, Е =
- 20. Упругие волны в изотропных средах Волны и вызывающие их волновые процессы являются особым видом движения, при
- 21. Волны в упругих средах возникают всякий раз, когда на какую-либо, часть тела действует изменяющаяся во времени
- 22. Волновое уравнение Распространение упругих (сейсмических) волн описывается линейным дифференциальным уравнением динамического равновесия Ламэ: где: U -
- 23. Векторное поле смещения частиц среды при упругих колебаниях является суммой двух составляющих – потенциальной и вихревой
- 24. Продольные и поперечные волны В твердой однородной изотропной среде могут независимо распространяться во времени и пространстве
- 25. Продольная волна Вызвана деформациями объема за счет поступательного движения частиц среды в направлении распространения упругих колебаний.
- 26. Поперечная волна Вызвана деформациями формы, т. е. малыми вращательными движениями (поворотами) частиц среды в плоскости, перпендикулярной
- 27. Характер деформаций упругой среды при распространении сейсмической волны: а - продольной Р; б - поперечной S
- 29. Особенности распространения сейсмических волн 1 - Продольная волна всегда распространяется быстрее, чем поперечная в той же
- 30. Сферические продольные волны Распространение сферической продольной волны в однородной среде а – сферический слой; б –
- 31. Импульсный сейсмический источник Источник начиная с момента времени t = 0, излучает в окружающую среду сферическую
- 32. Идеальный излучатель продольных волн - пульсирующая сфера Ввиду сферической симметрии источника поле смещений Up(r, t) в
- 33. Геометрическое расхождение фронта волны Амплитуда сейсмических колебаний убывает по мере удаления от источника, хотя в абсолютно
- 34. Изображение продольной волны: Волновой процесс изображают в пространстве или во времени с помощью графиков профиля волны
- 35. Профиль волны – up(r) показывает для фиксированного момента времени (t = const) зависимость величины смещения частиц
- 36. Запись волны (трасса) up(t) показывает для фиксированной точки (r = const) , зависимость величины ее смещения
- 37. Плоские волны Будучи математической абстракцией, это понятие, тем не менее, играет важную роль в теории и
- 38. Основные принципы (постулаты) теории распространения сейсмических волн Фундаментальной основой теории распространения упругих волн служит интеграл Кирхгофа.
- 39. Принцип Гюйгенса-Френеля Интеграл Кирхгофа является аналитическим выражением дифракционного принципа Гюйгенса-Френеля - точки среды, которых достигла сейсмическая
- 40. Принцип Гюйгенса Используется для определения положения фронта волн в разные моменты времени. Пусть в момент t1
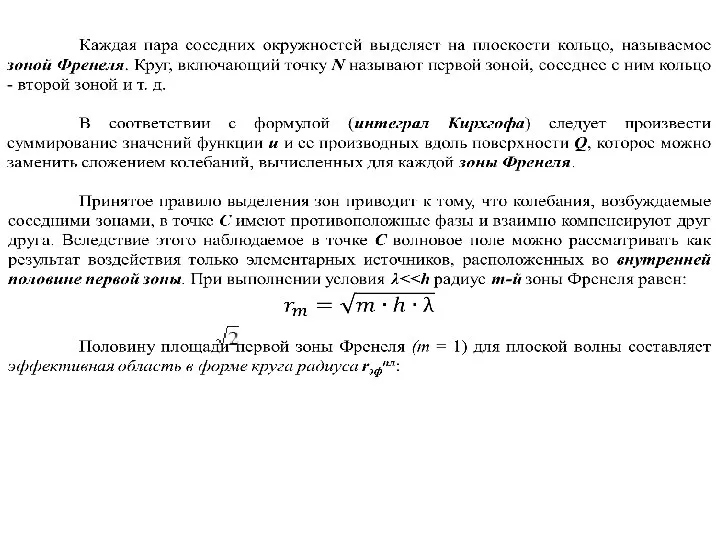
- 41. Зоны Френеля - плоские волны Пусть фазовая поверхность плоской монохроматической волны длиной λ в некоторой момент
- 42. Смысл формулы таков: упругие колебания, достигающие точки наблюдения, практически определяются той областью волнового поля, которая ранее
- 43. Зоны Френеля - сферические волны Радиус эффективной области на поверхности фронта сферической волны при его удалении
- 45. Принцип Ферма Принцип Ферма в его простейшей форме заключается в том, что время пробега волны вдоль
- 46. Геометрическая сейсмика Геометрическая сейсмика - метод описания волновых процессов, исходящий из представления, что сейсмическая энергия при
- 48. Скачать презентацию
Общие понятия
Однородное безграничное пространство - это наиболее простая модель среды,
Общие понятия Однородное безграничное пространство - это наиболее простая модель среды,
Напряжения и деформации
Процесс распространения упругих (сейсмических) волн в геологической среде это
Напряжения и деформации
Процесс распространения упругих (сейсмических) волн в геологической среде это
Если в результате деформаций произошли необратимые изменения первоначальной структуры среды, то
Если в результате деформаций произошли необратимые изменения первоначальной структуры среды, то
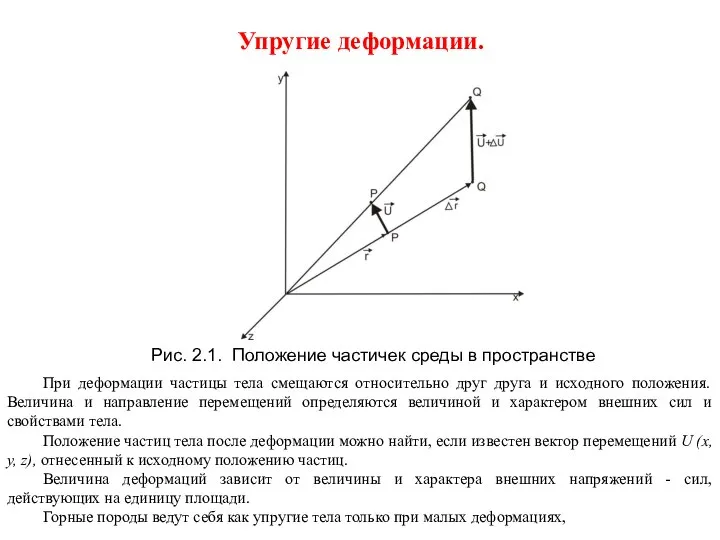
Упругие деформации.
Рис. 2.1. Положение частичек среды в пространстве
При деформации частицы тела
Упругие деформации.
Рис. 2.1. Положение частичек среды в пространстве
При деформации частицы тела
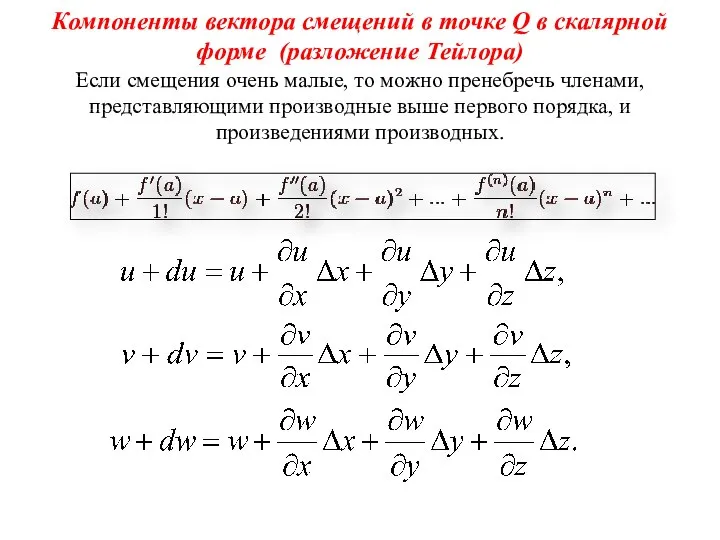
Компоненты вектора смещений в точке Q в скалярной форме (разложение Тейлора)
Если
Компоненты вектора смещений в точке Q в скалярной форме (разложение Тейлора) Если
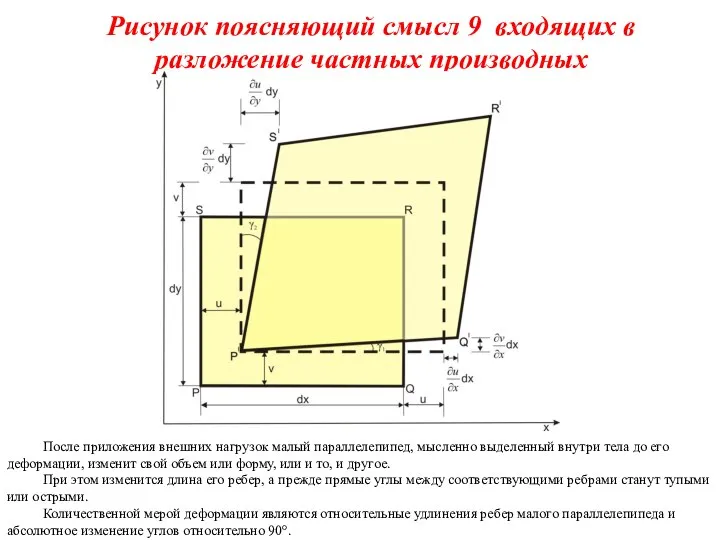
Рисунок поясняющий смысл 9 входящих в разложение частных производных
После приложения внешних
Рисунок поясняющий смысл 9 входящих в разложение частных производных
После приложения внешних
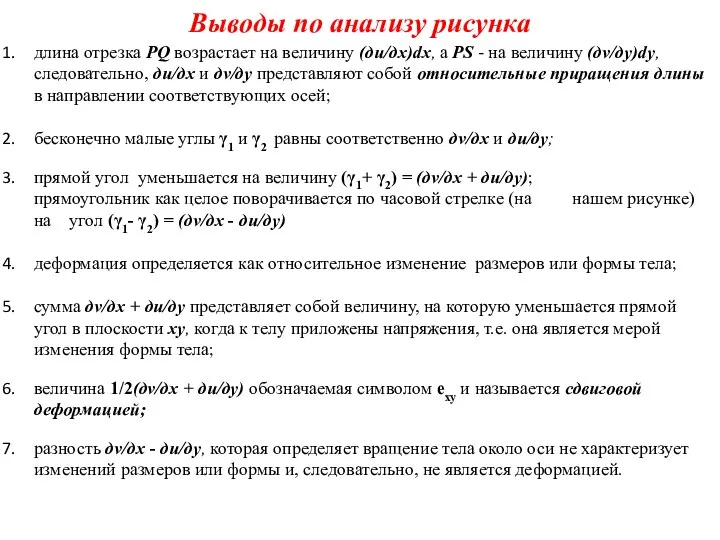
Выводы по анализу рисунка
длина отрезка РQ возрастает на величину (ди/дх)dх, а
Выводы по анализу рисунка
длина отрезка РQ возрастает на величину (ди/дх)dх, а
Нормальные и сдвиговые деформации
Нормальные и сдвиговые деформации
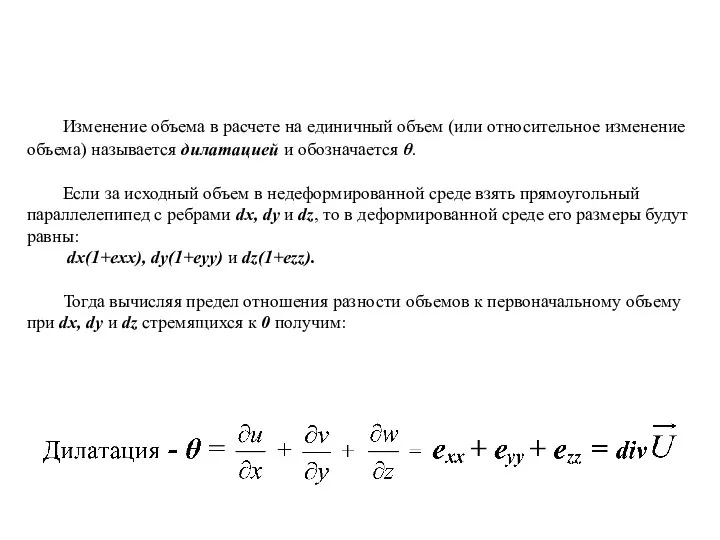
Изменение объема в расчете на единичный объем (или относительное изменение объема)
Изменение объема в расчете на единичный объем (или относительное изменение объема)
Упругие напряжения
Рассмотрим элементарный объем упругой среды, в котором под действием внешних
Упругие напряжения
Рассмотрим элементарный объем упругой среды, в котором под действием внешних
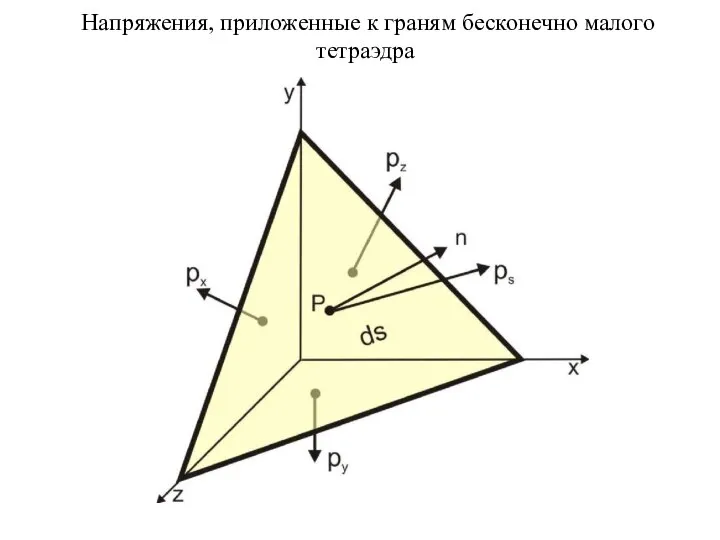
Напряжения, приложенные к граням бесконечно малого тетраэдра
Напряжения, приложенные к граням бесконечно малого тетраэдра
Компоненты напряжений
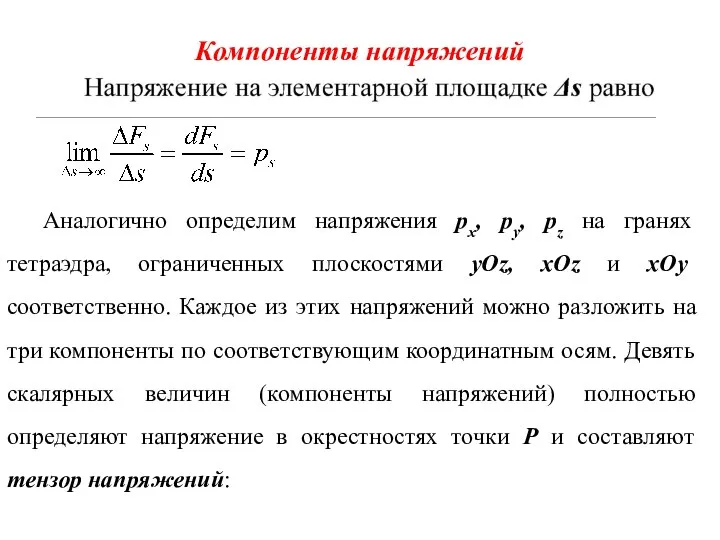
Аналогично определим напряжения рх, ру, рz на гранях тетраэдра, ограниченных
Компоненты напряжений
Аналогично определим напряжения рх, ру, рz на гранях тетраэдра, ограниченных
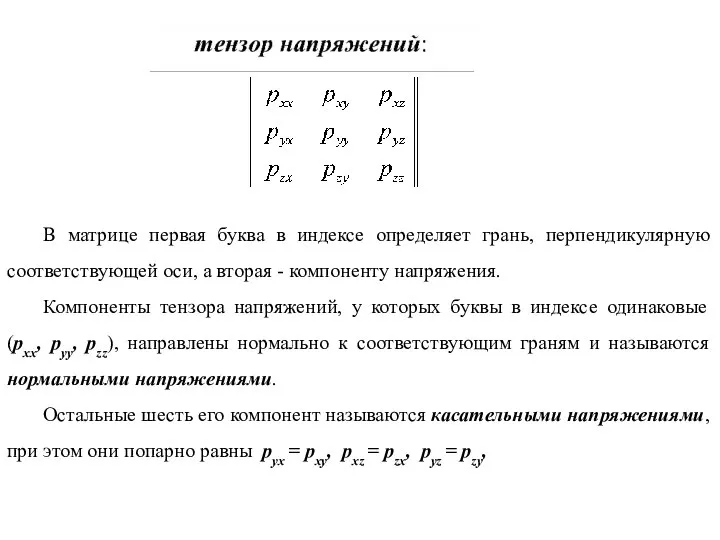
В матрице первая буква в индексе определяет грань, перпендикулярную соответствующей оси,
В матрице первая буква в индексе определяет грань, перпендикулярную соответствующей оси,
Закон Гука
Чтобы вычислять деформации при известных напряжениях, мы должны знать зависимость
Закон Гука
Чтобы вычислять деформации при известных напряжениях, мы должны знать зависимость
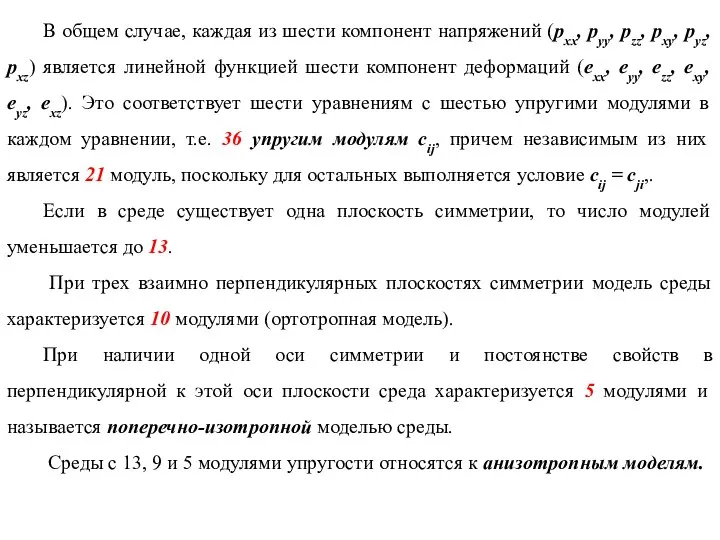
В общем случае, каждая из шести компонент напряжений (рхх, pyy, pzz,
В общем случае, каждая из шести компонент напряжений (рхх, pyy, pzz,
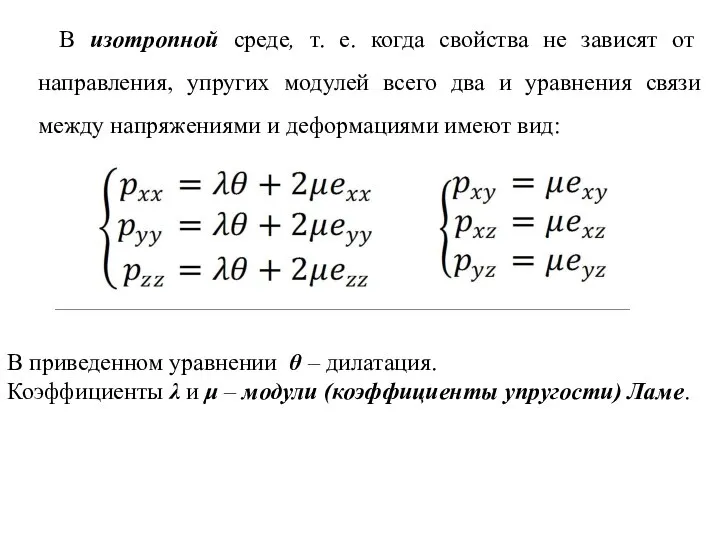
В изотропной среде, т. е. когда свойства не зависят от направления,
В изотропной среде, т. е. когда свойства не зависят от направления,
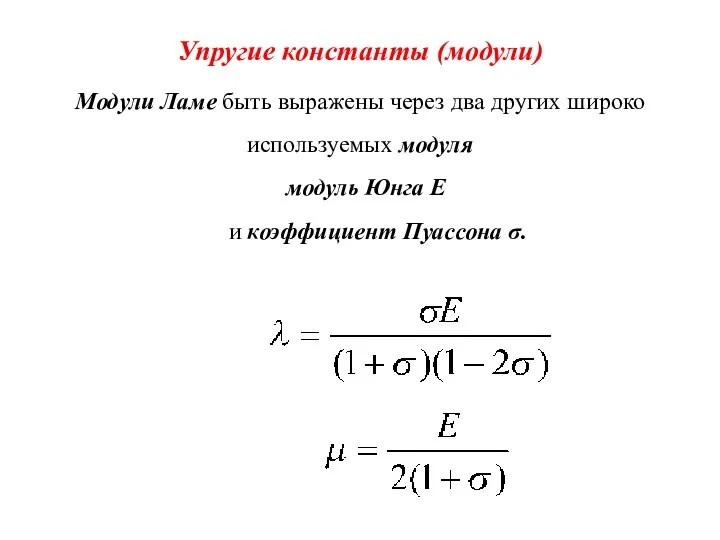
Упругие константы (модули)
Модули Ламе быть выражены через два других широко используемых
Упругие константы (модули)
Модули Ламе быть выражены через два других широко используемых
Модулем Юнга Е называется коэффициент, который характеризует сопротивление горной породы
Модулем Юнга Е называется коэффициент, который характеризует сопротивление горной породы
Упругие волны в изотропных средах
Волны и вызывающие их волновые процессы являются
Упругие волны в изотропных средах
Волны и вызывающие их волновые процессы являются
Волны в упругих средах возникают всякий раз, когда на какую-либо, часть
Волны в упругих средах возникают всякий раз, когда на какую-либо, часть
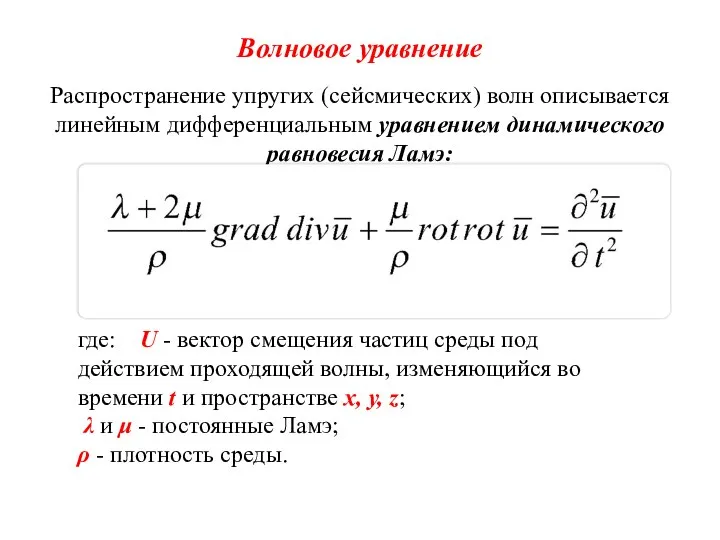
Волновое уравнение
Распространение упругих (сейсмических) волн описывается линейным дифференциальным уравнением динамического равновесия
Волновое уравнение
Распространение упругих (сейсмических) волн описывается линейным дифференциальным уравнением динамического равновесия
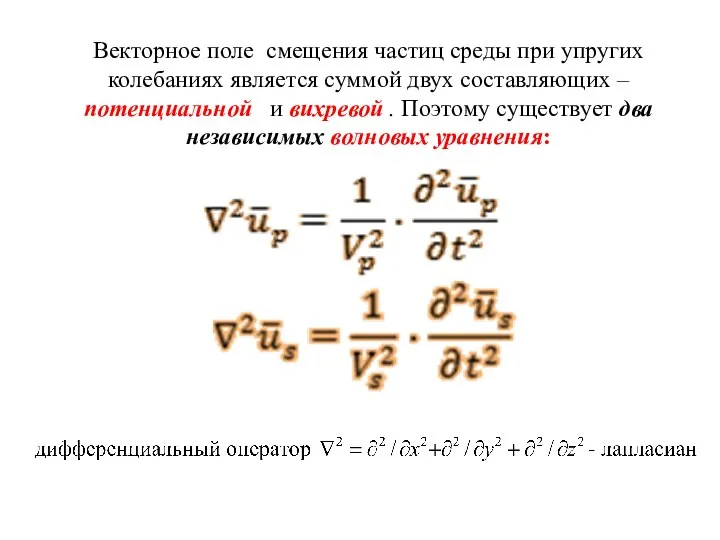
Векторное поле смещения частиц среды при упругих колебаниях является суммой двух
Векторное поле смещения частиц среды при упругих колебаниях является суммой двух
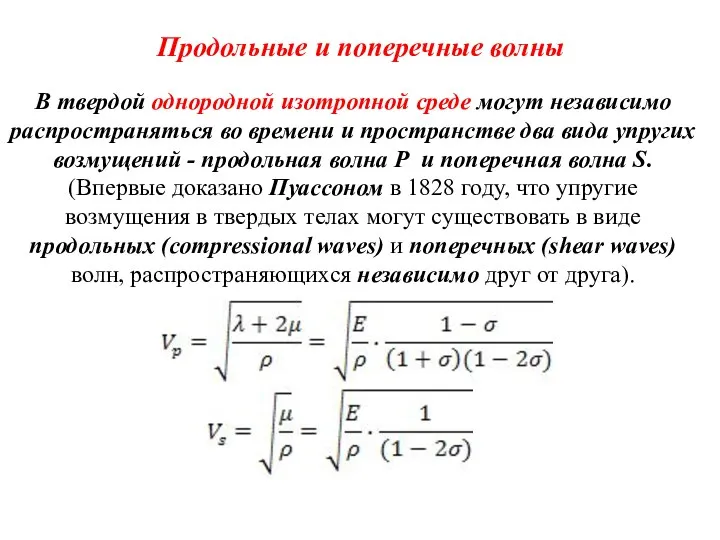
Продольные и поперечные волны
В твердой однородной изотропной среде могут независимо распространяться
Продольные и поперечные волны
В твердой однородной изотропной среде могут независимо распространяться
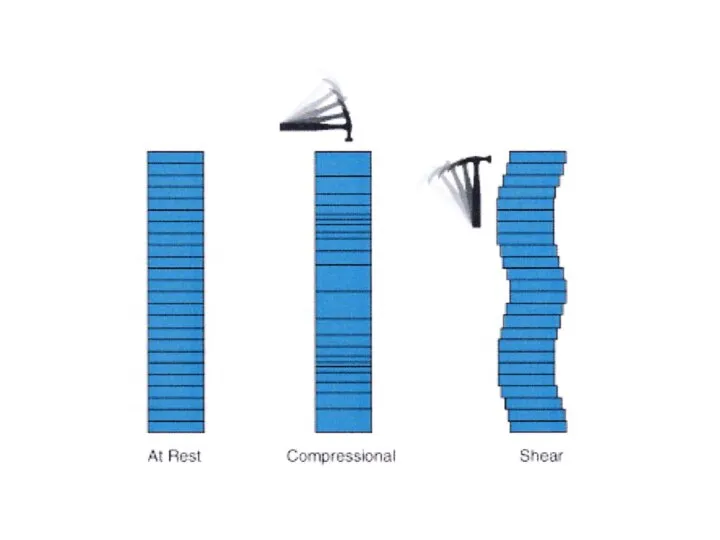
Продольная волна
Вызвана деформациями объема за счет поступательного движения частиц среды в
Продольная волна
Вызвана деформациями объема за счет поступательного движения частиц среды в
Поперечная волна
Вызвана деформациями формы, т. е. малыми вращательными движениями (поворотами) частиц
Поперечная волна
Вызвана деформациями формы, т. е. малыми вращательными движениями (поворотами) частиц
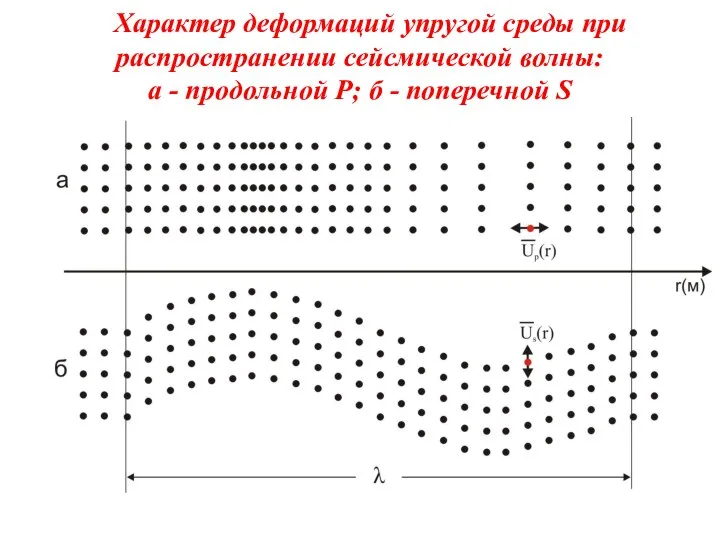
Характер деформаций упругой среды при распространении сейсмической волны:
а - продольной
Характер деформаций упругой среды при распространении сейсмической волны: а - продольной
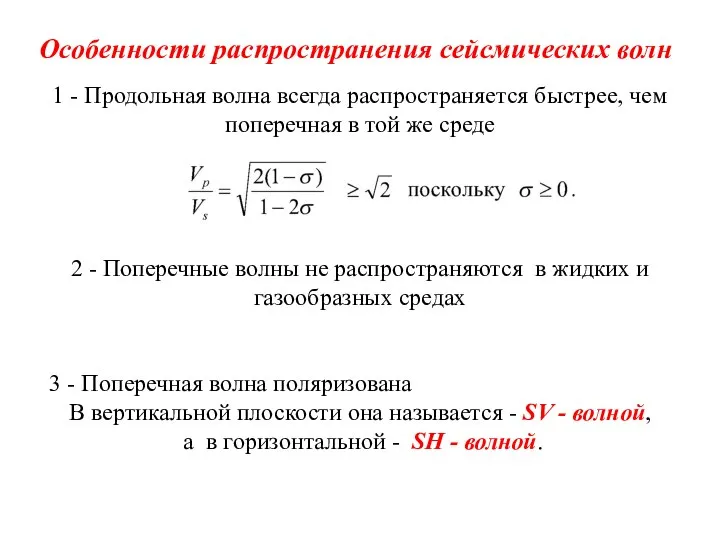
Особенности распространения сейсмических волн
1 - Продольная волна всегда распространяется быстрее, чем
Особенности распространения сейсмических волн
1 - Продольная волна всегда распространяется быстрее, чем
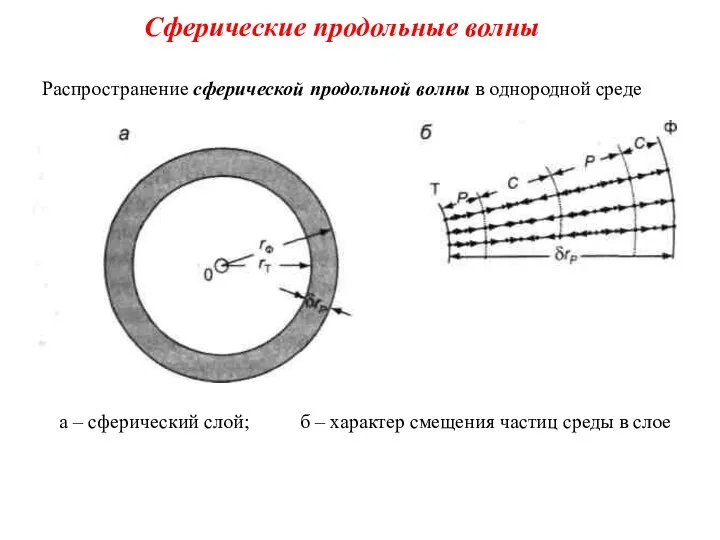
Сферические продольные волны
Распространение сферической продольной волны в однородной среде
а – сферический
Сферические продольные волны
Распространение сферической продольной волны в однородной среде
а – сферический
Импульсный сейсмический источник
Источник начиная с момента времени t = 0,
Импульсный сейсмический источник
Источник начиная с момента времени t = 0,
Идеальный излучатель продольных волн - пульсирующая сфера
Ввиду сферической симметрии источника поле
Идеальный излучатель продольных волн - пульсирующая сфера
Ввиду сферической симметрии источника поле
Геометрическое расхождение фронта волны
Амплитуда сейсмических колебаний убывает по мере удаления
Геометрическое расхождение фронта волны
Амплитуда сейсмических колебаний убывает по мере удаления
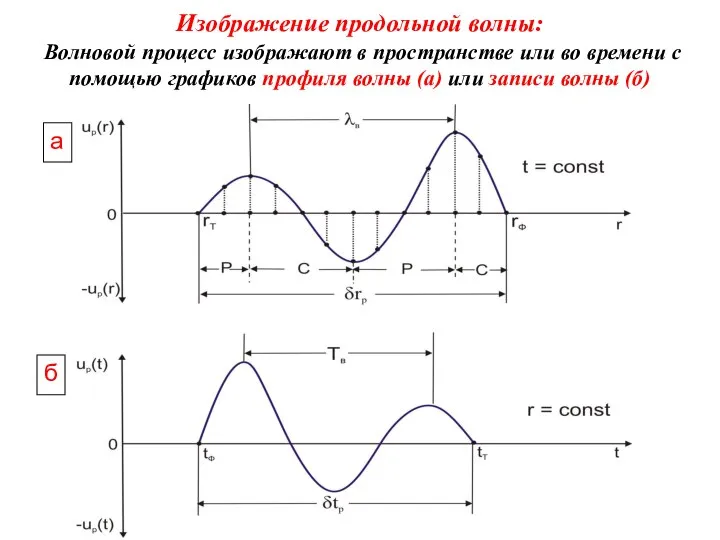
Изображение продольной волны: Волновой процесс изображают в пространстве или во времени
Изображение продольной волны: Волновой процесс изображают в пространстве или во времени
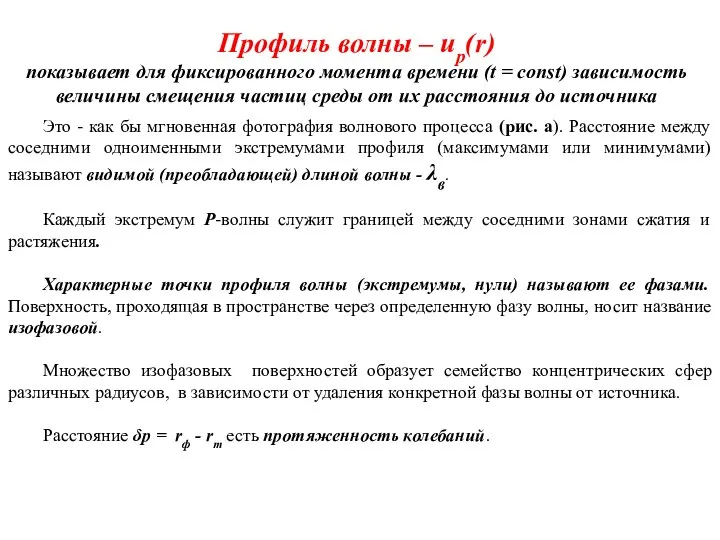
Профиль волны – up(r)
показывает для фиксированного момента времени (t =
Профиль волны – up(r) показывает для фиксированного момента времени (t =
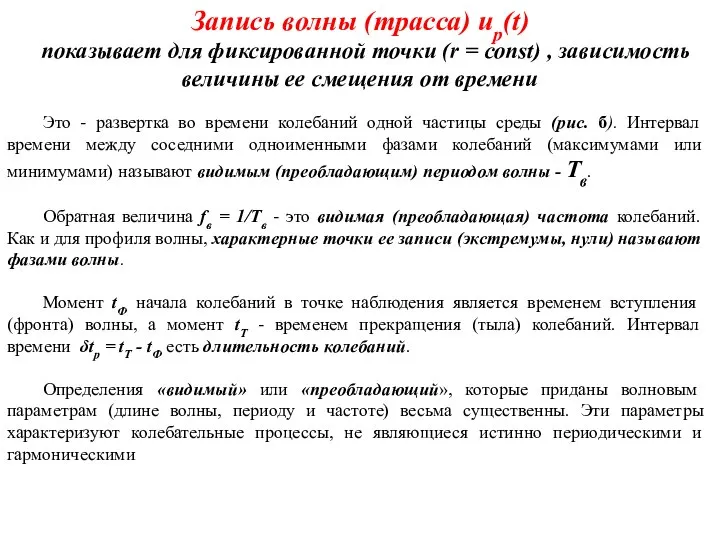
Запись волны (трасса) up(t)
показывает для фиксированной точки (r = const)
Запись волны (трасса) up(t) показывает для фиксированной точки (r = const)
Плоские волны
Будучи математической абстракцией, это понятие, тем не менее, играет
Плоские волны
Будучи математической абстракцией, это понятие, тем не менее, играет
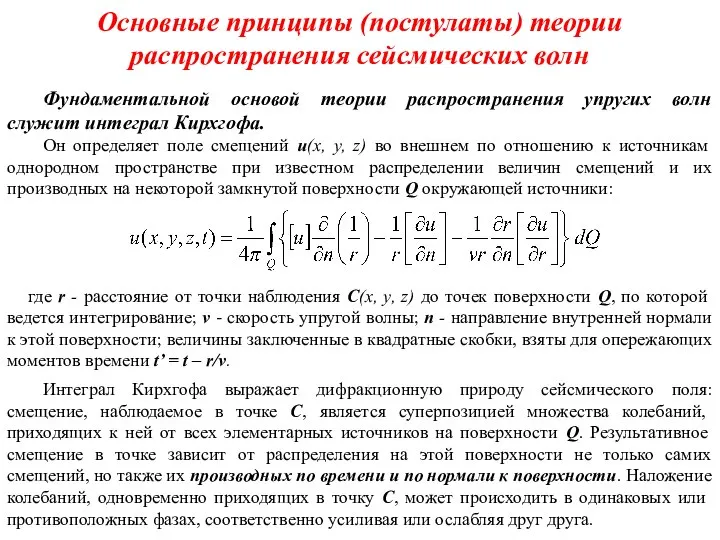
Основные принципы (постулаты) теории распространения сейсмических волн
Фундаментальной основой теории распространения упругих
Основные принципы (постулаты) теории распространения сейсмических волн
Фундаментальной основой теории распространения упругих
Принцип Гюйгенса-Френеля
Интеграл Кирхгофа является аналитическим выражением дифракционного принципа Гюйгенса-Френеля - точки
Принцип Гюйгенса-Френеля
Интеграл Кирхгофа является аналитическим выражением дифракционного принципа Гюйгенса-Френеля - точки
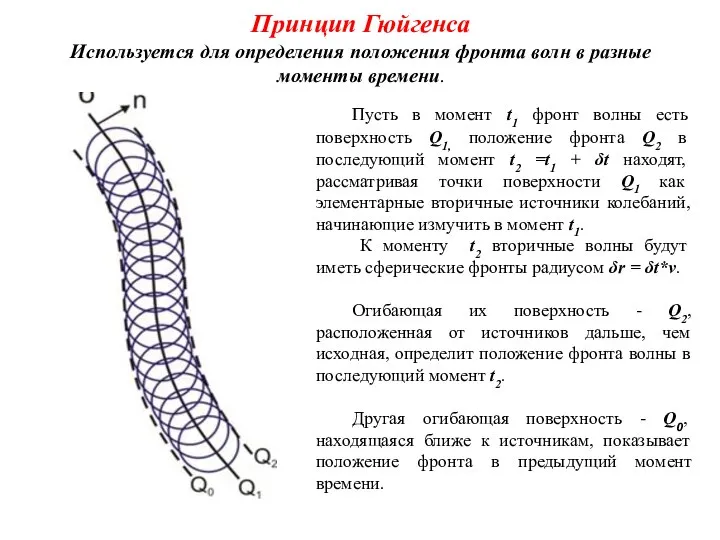
Принцип Гюйгенса
Используется для определения положения фронта волн в разные моменты времени.
Пусть
Принцип Гюйгенса
Используется для определения положения фронта волн в разные моменты времени.
Пусть
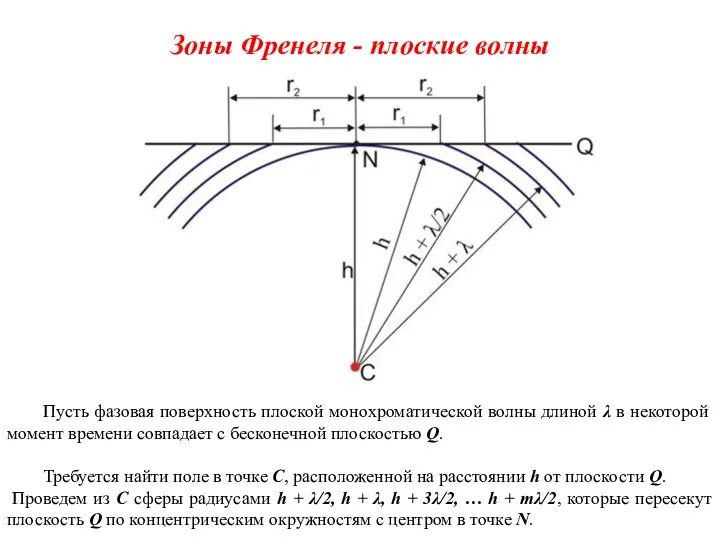
Зоны Френеля - плоские волны
Пусть фазовая поверхность плоской монохроматической волны длиной
Зоны Френеля - плоские волны
Пусть фазовая поверхность плоской монохроматической волны длиной
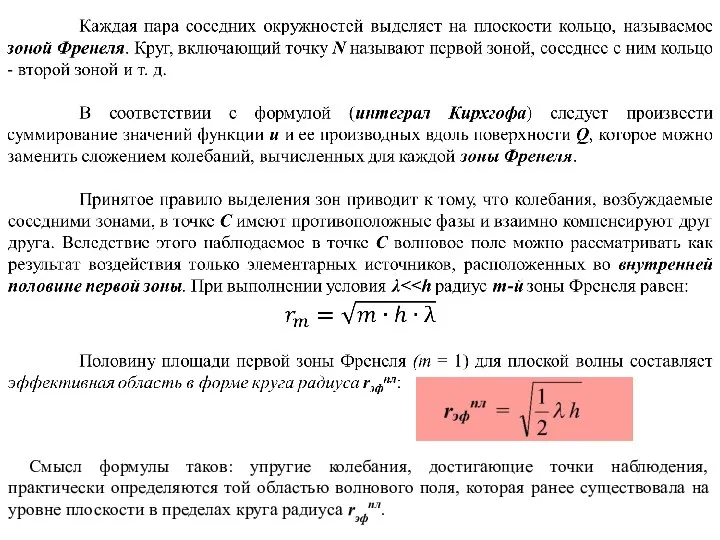
Смысл формулы таков: упругие колебания, достигающие точки наблюдения, практически определяются той
Смысл формулы таков: упругие колебания, достигающие точки наблюдения, практически определяются той
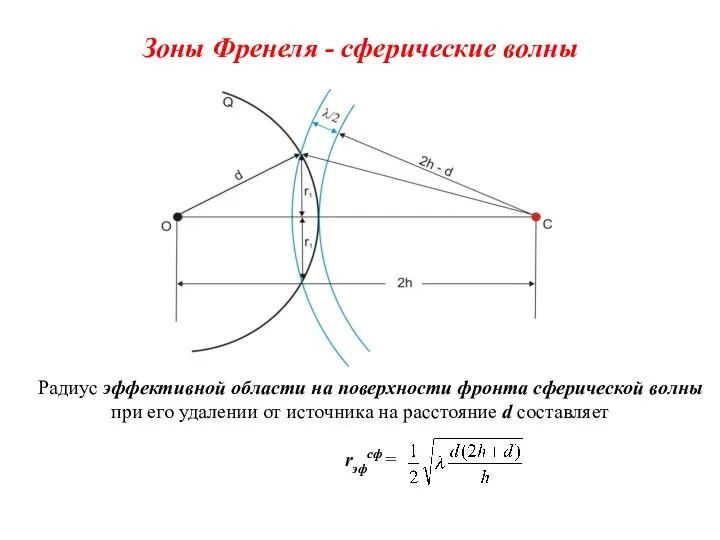
Зоны Френеля - сферические волны
Радиус эффективной области на поверхности фронта сферической
Зоны Френеля - сферические волны
Радиус эффективной области на поверхности фронта сферической
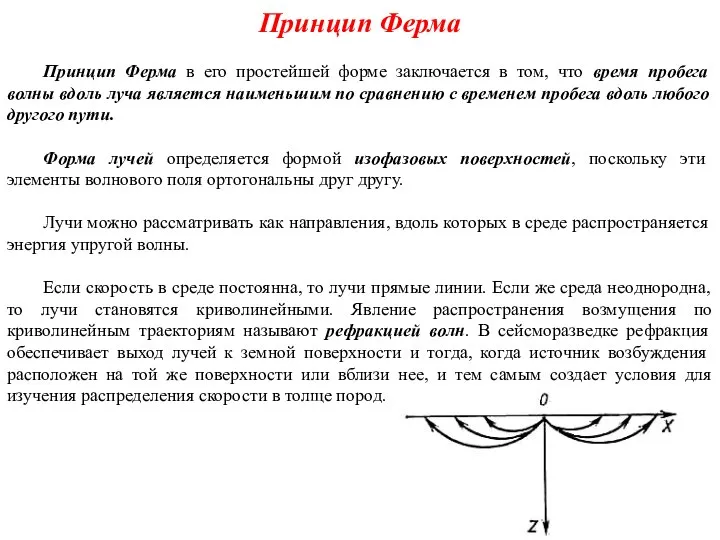
Принцип Ферма
Принцип Ферма в его простейшей форме заключается в том, что
Принцип Ферма
Принцип Ферма в его простейшей форме заключается в том, что
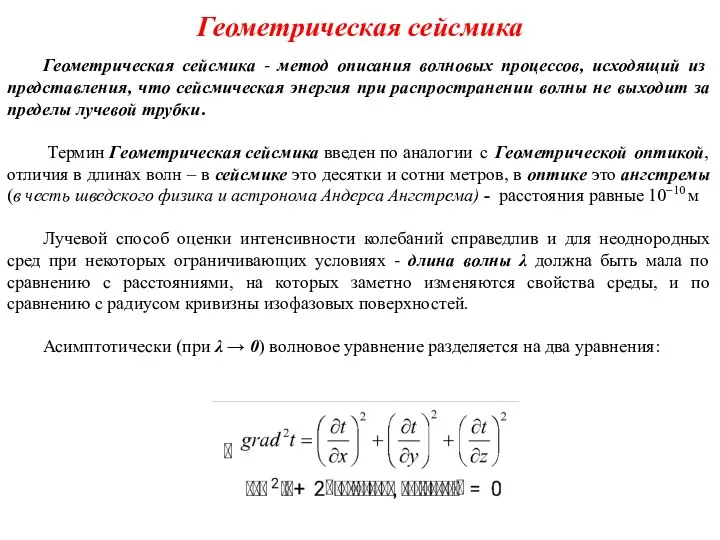
Геометрическая сейсмика
Геометрическая сейсмика - метод описания волновых процессов, исходящий из представления,
Геометрическая сейсмика
Геометрическая сейсмика - метод описания волновых процессов, исходящий из представления,
 Засади поширення радіохвиль
Засади поширення радіохвиль Механические колебания и их характеристики. Виды колебаний. Механические волны
Механические колебания и их характеристики. Виды колебаний. Механические волны Давление газа
Давление газа Механическое движение и его виды
Механическое движение и его виды Характеристика систем электроснабжения воздушных судов. Состав, назначение и классификация систем электроснабжения. (Тема 1.1)
Характеристика систем электроснабжения воздушных судов. Состав, назначение и классификация систем электроснабжения. (Тема 1.1) Эксплуатация релейной защиты электрооборудования электрических станций
Эксплуатация релейной защиты электрооборудования электрических станций Квадратичные эффекты отражения в ферромагнетиках
Квадратичные эффекты отражения в ферромагнетиках Статика
Статика Модель атома Резерфорда. Атомные спектры. Постулаты Бора. Опыт Франка и Герца. Элементарная боровская теория водородного атома
Модель атома Резерфорда. Атомные спектры. Постулаты Бора. Опыт Франка и Герца. Элементарная боровская теория водородного атома Толқындық оптика
Толқындық оптика Ультразвуковые колебания. Ультразвук и инфразвук
Ультразвуковые колебания. Ультразвук и инфразвук Сила струму. Амперметр. Вимірювання сили струму. (9 класс)
Сила струму. Амперметр. Вимірювання сили струму. (9 класс) Қатты диэлектриктің жылулық және ионизациялық тесілуі
Қатты диэлектриктің жылулық және ионизациялық тесілуі Презентация по физике "Измерение размеров деталей с помощью штангенциркуля" - скачать
Презентация по физике "Измерение размеров деталей с помощью штангенциркуля" - скачать  Окружающий мир как иерархическая система. 9 класс
Окружающий мир как иерархическая система. 9 класс Элементы квантовой статистики и физики твёрдого тела. Лекция № 7. Часть 2
Элементы квантовой статистики и физики твёрдого тела. Лекция № 7. Часть 2 Построение эпюр внутренних сил, напряжений и деформаций растяжения-сжатия
Построение эпюр внутренних сил, напряжений и деформаций растяжения-сжатия Магнитное поле. Действие магнитного поля на электрический заряд и опыты, иллюстрирующее это действие. Магнитная индукция
Магнитное поле. Действие магнитного поля на электрический заряд и опыты, иллюстрирующее это действие. Магнитная индукция Флуиди. Идеален флуид
Флуиди. Идеален флуид Радиоактивность – способность некоторых ядер самопроизвольно превращаться в другие ядра с испусканием различных видов радио
Радиоактивность – способность некоторых ядер самопроизвольно превращаться в другие ядра с испусканием различных видов радио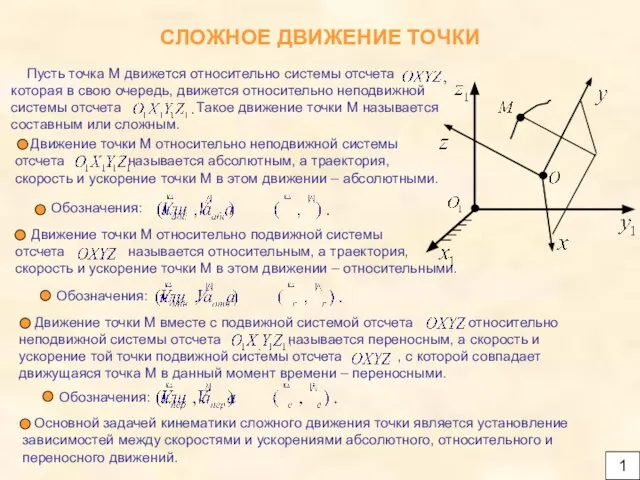 Сложное движение точки
Сложное движение точки Третий закон термодинамики
Третий закон термодинамики Резонанс в цепи переменного тока
Резонанс в цепи переменного тока Презентация Что изучает Физика
Презентация Что изучает Физика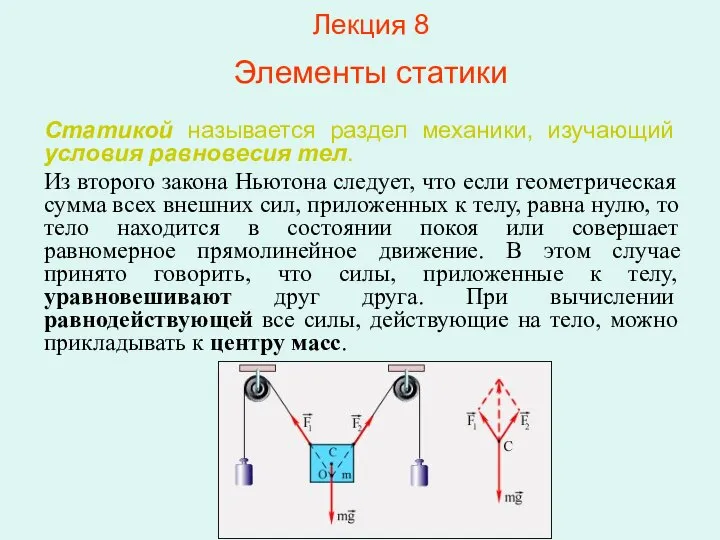 Элементы статики
Элементы статики Строение вещества, атома
Строение вещества, атома Онлайн Электрик: Расчет и анализ установившихся режимов электрических сетей
Онлайн Электрик: Расчет и анализ установившихся режимов электрических сетей Распространение плоских волн в гиротропных средах
Распространение плоских волн в гиротропных средах