- Funkcja energii sprężystości

Содержание
- 2. Spis treści Idea pracy Analizowany implant Funkcja energii sprężystości Procedura w Wolfram Mathematica Procedura w Matlab
- 3. Idea pracy Zamodelowanie implantu (materiał hipersprężysty) w programie numerycznym jako model membranowy anizotropowy.
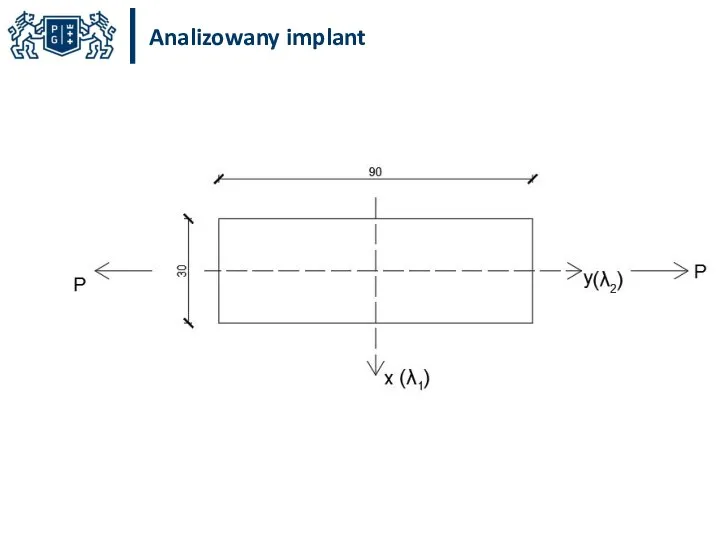
- 4. Analizowany implant
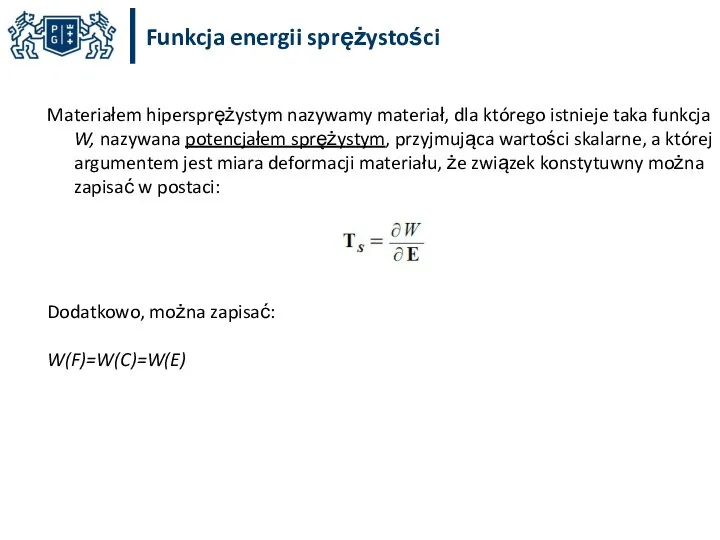
- 5. Funkcja energii sprężystości Materiałem hipersprężystym nazywamy materiał, dla którego istnieje taka funkcja W, nazywana potencjałem sprężystym,
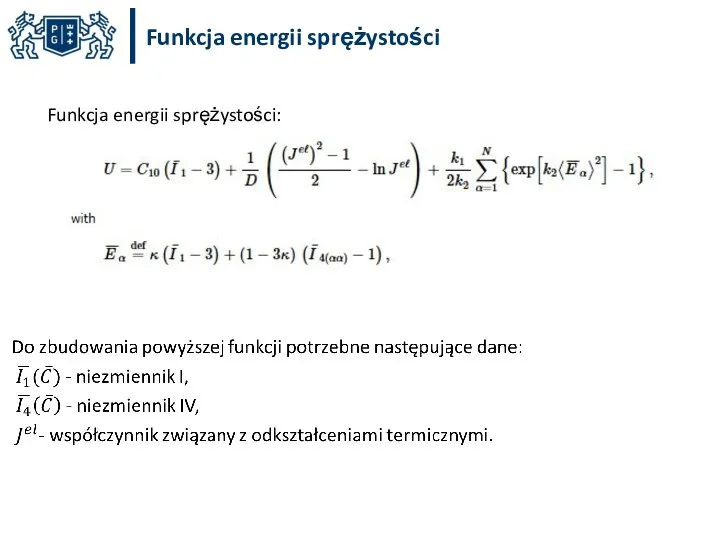
- 6. Funkcja energii sprężystości Funkcja energii sprężystości:
- 7. Funkcja energii sprężystości Funkcja energii sprężystości: Do zbudowania powyższej funkcji potrzebne następujące dane: C10 – parametr
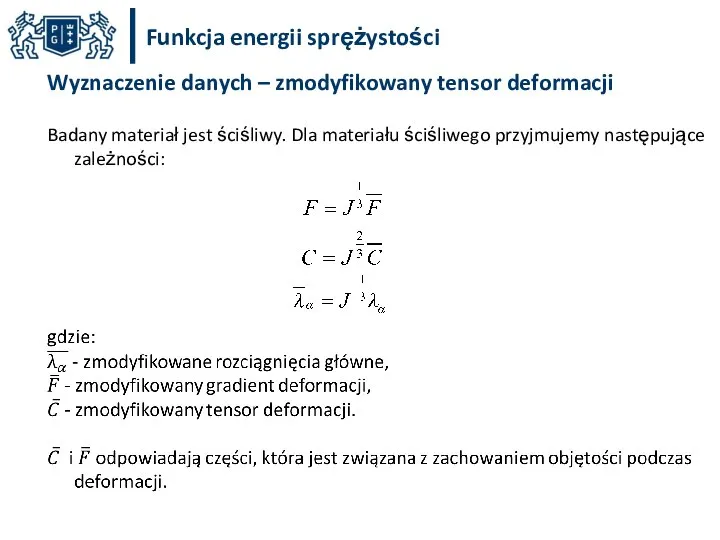
- 8. Funkcja energii sprężystości Badany materiał jest ściśliwy. Dla materiału ściśliwego przyjmujemy następujące zależności: Wyznaczenie danych –
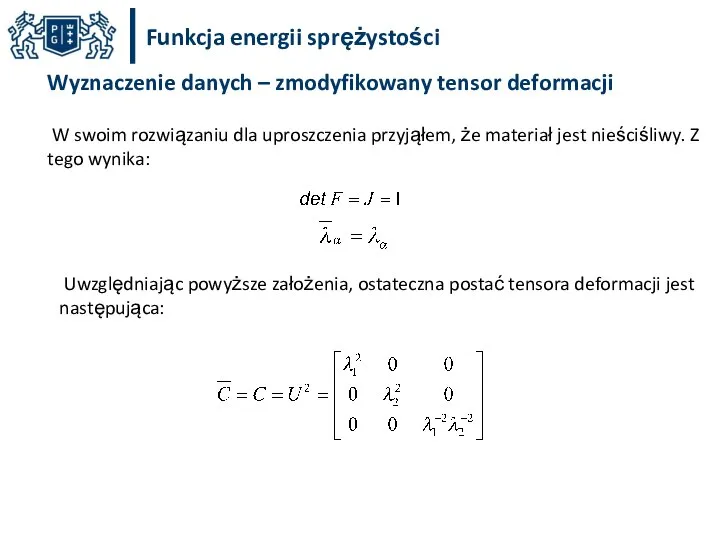
- 9. Funkcja energii sprężystości W swoim rozwiązaniu dla uproszczenia przyjąłem, że materiał jest nieściśliwy. Z tego wynika:
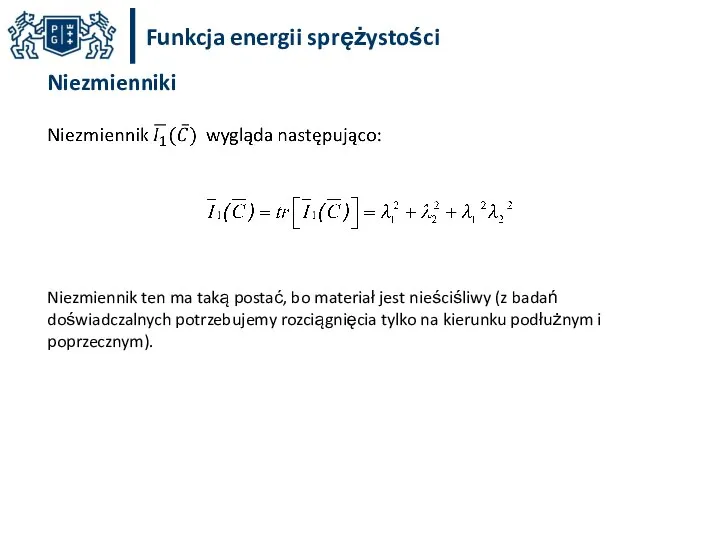
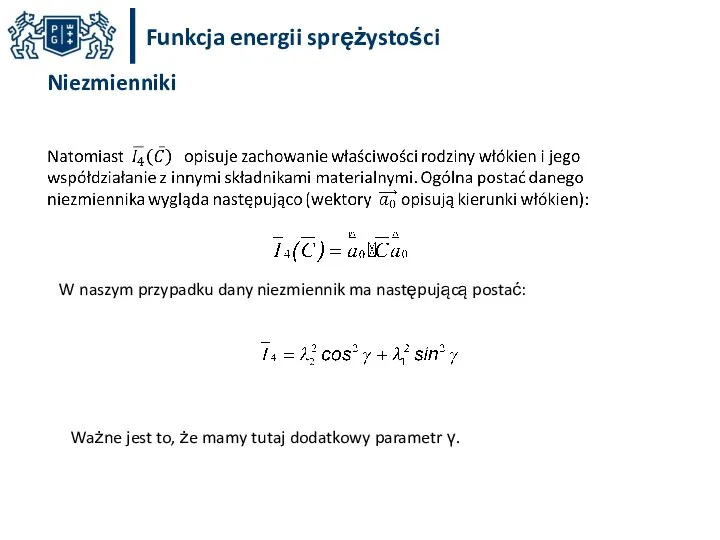
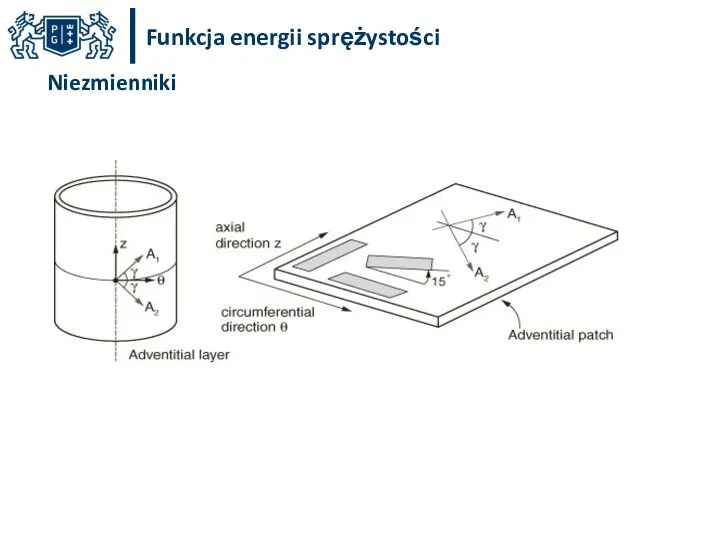
- 10. Funkcja energii sprężystości Niezmienniki Niezmiennik ten ma taką postać, bo materiał jest nieściśliwy (z badań doświadczalnych
- 11. Funkcja energii sprężystości Niezmienniki W naszym przypadku dany niezmiennik ma następującą postać: Ważne jest to, że
- 12. Funkcja energii sprężystości Niezmienniki
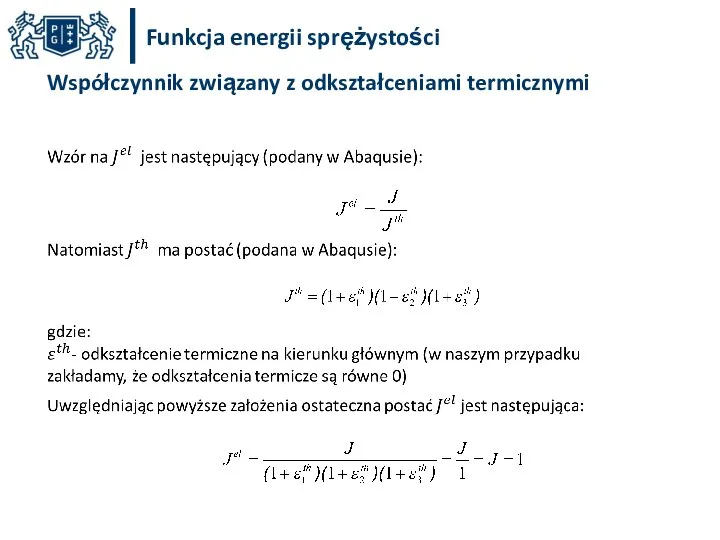
- 13. Funkcja energii sprężystości Współczynnik związany z odkształceniami termicznymi
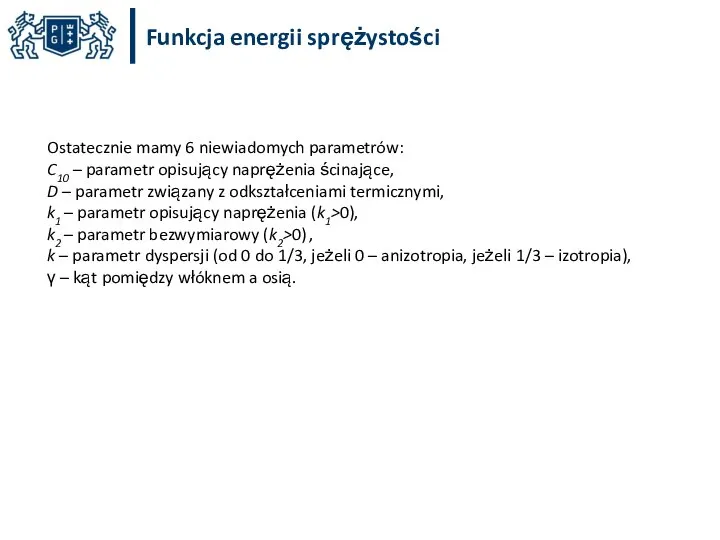
- 14. Funkcja energii sprężystości Ostatecznie mamy 6 niewiadomych parametrów: C10 – parametr opisujący naprężenia ścinające, D –
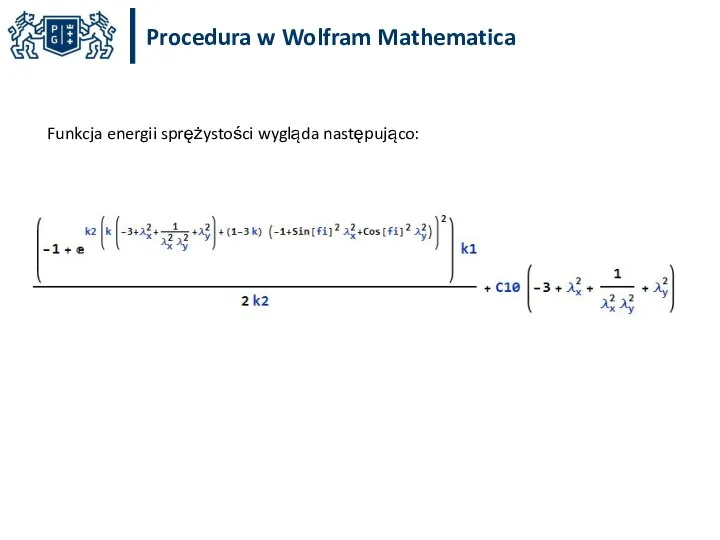
- 15. Procedura w Wolfram Mathematica Funkcja energii sprężystości wygląda następująco:
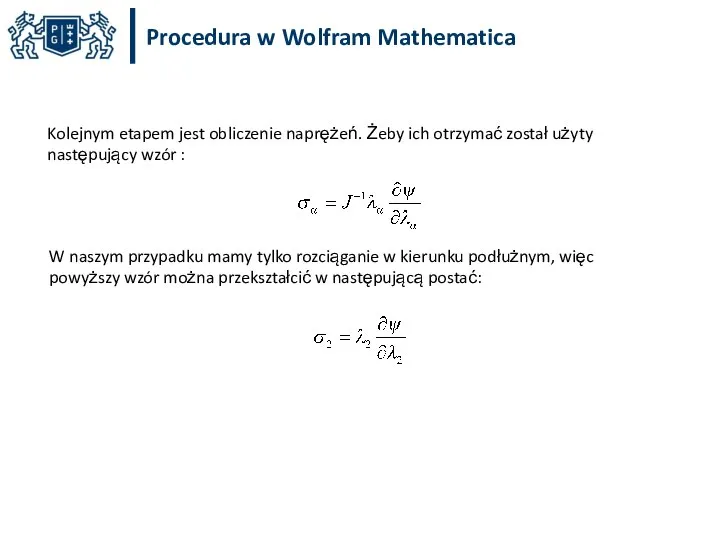
- 16. Procedura w Wolfram Mathematica Kolejnym etapem jest obliczenie naprężeń. Żeby ich otrzymać został użyty następujący wzór
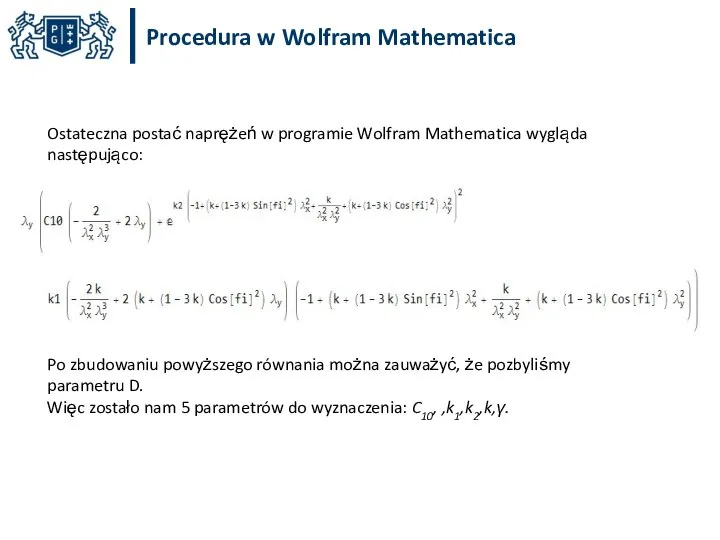
- 17. Procedura w Wolfram Mathematica Ostateczna postać naprężeń w programie Wolfram Mathematica wygląda następująco: Po zbudowaniu powyższego
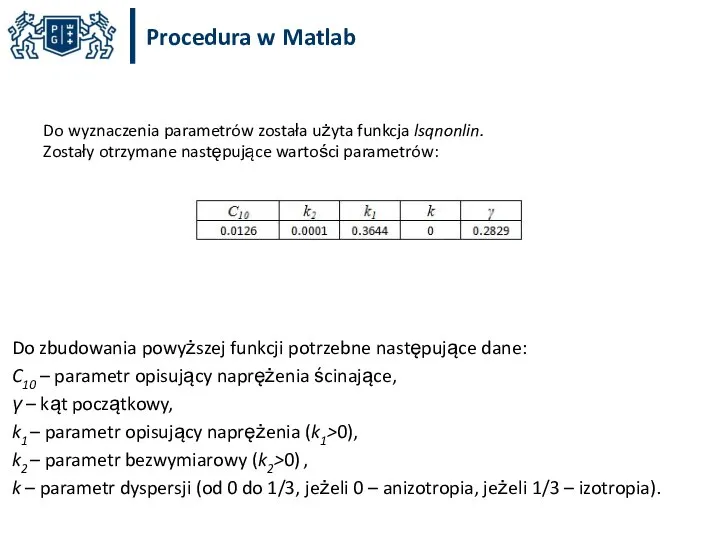
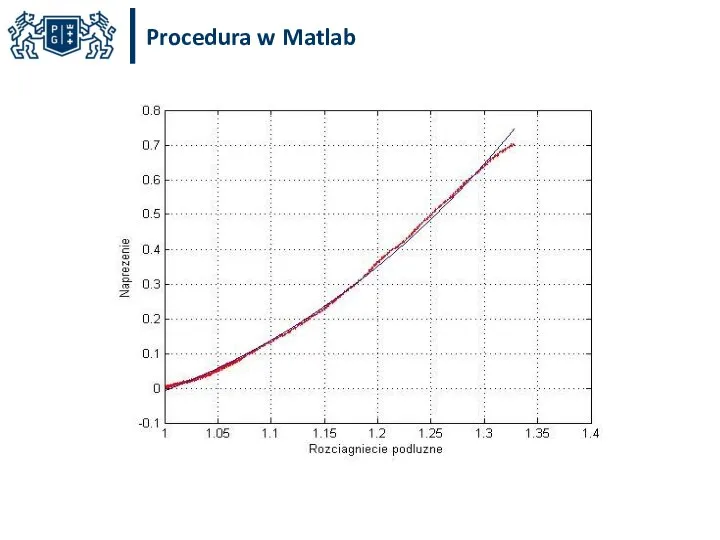
- 18. Procedura w Matlab Do wyznaczenia parametrów została użyta funkcja lsqnonlin. Zostały otrzymane następujące wartości parametrów: Do
- 19. Procedura w Matlab
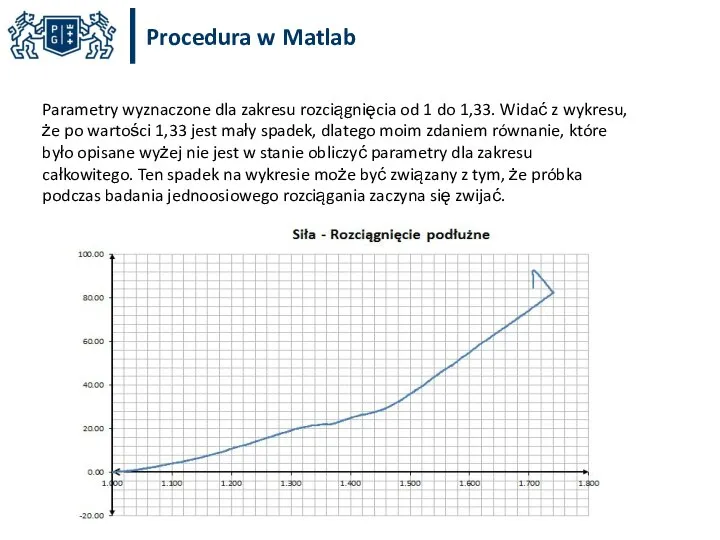
- 20. Procedura w Matlab Parametry wyznaczone dla zakresu rozciągnięcia od 1 do 1,33. Widać z wykresu, że
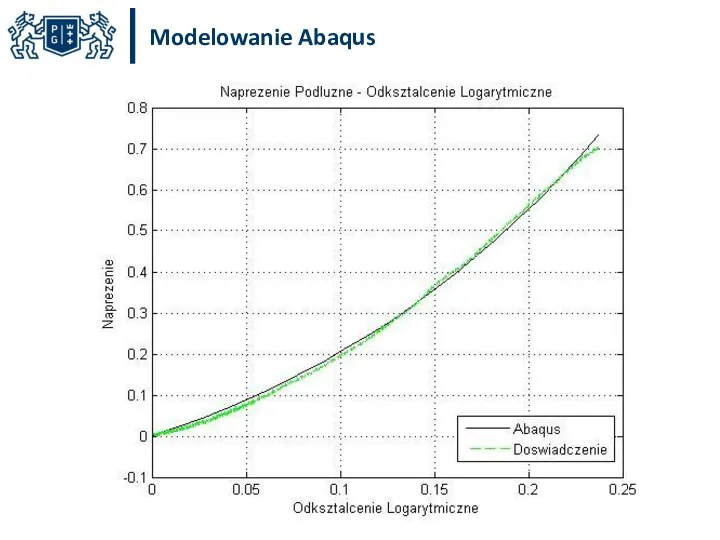
- 21. Modelowanie Abaqus
- 22. Modelowanie Abaqus
- 23. Modelowanie Abaqus
- 24. Literatura 1. T. Christian Gasser, Ray W. Ogden and Gerhard A. Holzapfel: Hyperelastic modelling of arterial
- 26. Скачать презентацию
Spis treści
Idea pracy
Analizowany implant
Funkcja energii sprężystości
Procedura w Wolfram Mathematica
Procedura w Matlab
Modelowanie
Spis treści
Idea pracy
Analizowany implant
Funkcja energii sprężystości
Procedura w Wolfram Mathematica
Procedura w Matlab
Modelowanie
Idea pracy
Zamodelowanie implantu (materiał hipersprężysty) w programie numerycznym jako model membranowy
Idea pracy
Zamodelowanie implantu (materiał hipersprężysty) w programie numerycznym jako model membranowy
Analizowany implant
Analizowany implant
Funkcja energii sprężystości
Materiałem hipersprężystym nazywamy materiał, dla którego istnieje taka funkcja
Funkcja energii sprężystości
Materiałem hipersprężystym nazywamy materiał, dla którego istnieje taka funkcja
Funkcja energii sprężystości
Funkcja energii sprężystości:
Funkcja energii sprężystości
Funkcja energii sprężystości:

Funkcja energii sprężystości
Funkcja energii sprężystości:
Do zbudowania powyższej funkcji potrzebne następujące dane:
C10
Funkcja energii sprężystości
Funkcja energii sprężystości:
Do zbudowania powyższej funkcji potrzebne następujące dane:
C10
Funkcja energii sprężystości
Badany materiał jest ściśliwy. Dla materiału ściśliwego przyjmujemy następujące
Funkcja energii sprężystości
Badany materiał jest ściśliwy. Dla materiału ściśliwego przyjmujemy następujące
Funkcja energii sprężystości
W swoim rozwiązaniu dla uproszczenia przyjąłem, że materiał
Funkcja energii sprężystości
W swoim rozwiązaniu dla uproszczenia przyjąłem, że materiał
Funkcja energii sprężystości
Niezmienniki
Niezmiennik ten ma taką postać, bo materiał jest nieściśliwy
Funkcja energii sprężystości
Niezmienniki
Niezmiennik ten ma taką postać, bo materiał jest nieściśliwy
Funkcja energii sprężystości
Niezmienniki
W naszym przypadku dany niezmiennik ma następującą postać:
Ważne jest
Funkcja energii sprężystości
Niezmienniki
W naszym przypadku dany niezmiennik ma następującą postać:
Ważne jest
Funkcja energii sprężystości
Niezmienniki
Funkcja energii sprężystości
Niezmienniki
Funkcja energii sprężystości
Współczynnik związany z odkształceniami termicznymi
Funkcja energii sprężystości
Współczynnik związany z odkształceniami termicznymi
Funkcja energii sprężystości
Ostatecznie mamy 6 niewiadomych parametrów:
C10 – parametr opisujący naprężenia
Funkcja energii sprężystości
Ostatecznie mamy 6 niewiadomych parametrów:
C10 – parametr opisujący naprężenia
Procedura w Wolfram Mathematica
Funkcja energii sprężystości wygląda następująco:
Procedura w Wolfram Mathematica
Funkcja energii sprężystości wygląda następująco:
Procedura w Wolfram Mathematica
Kolejnym etapem jest obliczenie naprężeń. Żeby ich otrzymać
Procedura w Wolfram Mathematica
Kolejnym etapem jest obliczenie naprężeń. Żeby ich otrzymać
Procedura w Wolfram Mathematica
Ostateczna postać naprężeń w programie Wolfram Mathematica wygląda
Procedura w Wolfram Mathematica
Ostateczna postać naprężeń w programie Wolfram Mathematica wygląda
Procedura w Matlab
Do wyznaczenia parametrów została użyta funkcja lsqnonlin.
Zostały otrzymane następujące
Procedura w Matlab
Do wyznaczenia parametrów została użyta funkcja lsqnonlin.
Zostały otrzymane następujące
Procedura w Matlab
Procedura w Matlab
Procedura w Matlab
Parametry wyznaczone dla zakresu rozciągnięcia od 1 do 1,33.
Procedura w Matlab
Parametry wyznaczone dla zakresu rozciągnięcia od 1 do 1,33.
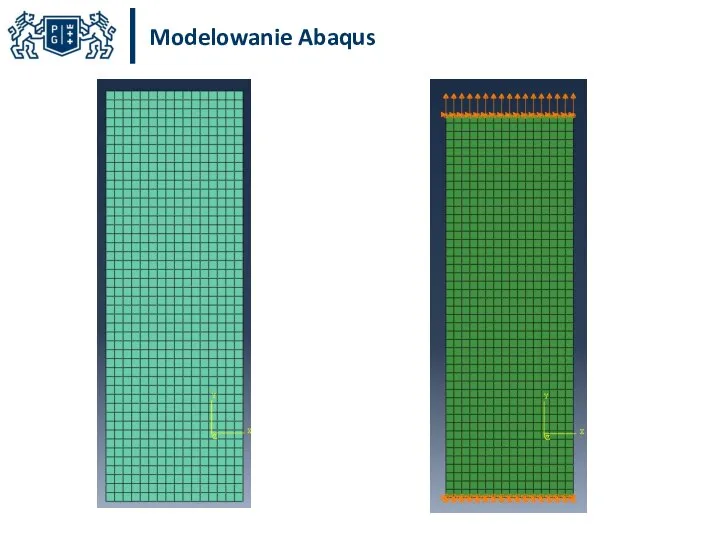
Modelowanie Abaqus
Modelowanie Abaqus
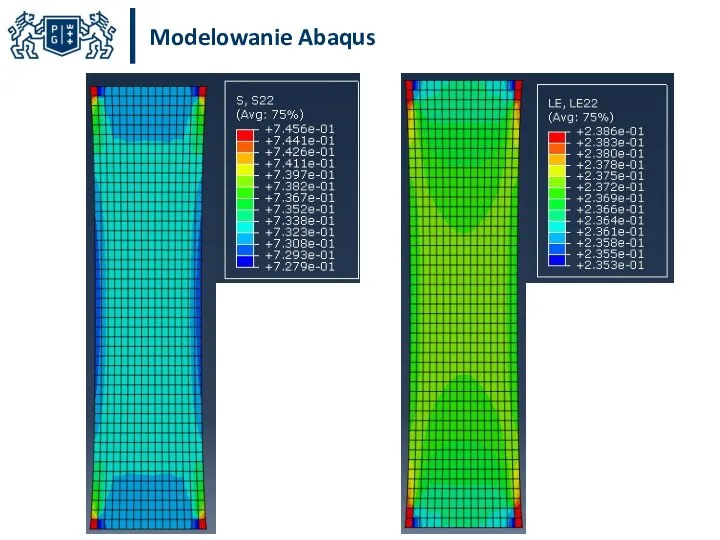
Modelowanie Abaqus
Modelowanie Abaqus
Modelowanie Abaqus
Modelowanie Abaqus
Literatura
1. T. Christian Gasser, Ray W. Ogden and Gerhard A. Holzapfel:
Literatura
1. T. Christian Gasser, Ray W. Ogden and Gerhard A. Holzapfel:
 Что такое электродинамика
Что такое электродинамика Електрична напруга. Вольтметр. Вимірювання напруги. (9 класс)
Електрична напруга. Вольтметр. Вимірювання напруги. (9 класс) Модели полевых транзисторов
Модели полевых транзисторов Оценка угла места в системах локации метрового диапазона
Оценка угла места в системах локации метрового диапазона Прикладная механика. Правила аттестации
Прикладная механика. Правила аттестации Виды самоходной техники в АПК
Виды самоходной техники в АПК Использование электроэнергии в транспорте
Использование электроэнергии в транспорте Магнитное поле
Магнитное поле Гравитациялық өріс. Өріс теориясының элементтері
Гравитациялық өріс. Өріс теориясының элементтері Динамика. Законы Ньютона
Динамика. Законы Ньютона Радиоэкологическая безопасность территорий
Радиоэкологическая безопасность территорий Электропроводность полупроводников и её виды
Электропроводность полупроводников и её виды Основы кинематики и динамики. Кинематика точки
Основы кинематики и динамики. Кинематика точки Лекция 6: Электромагнитная теория света. Поляризация. Формулы Френеля
Лекция 6: Электромагнитная теория света. Поляризация. Формулы Френеля Рентгенофазовый анализ
Рентгенофазовый анализ Логические элементы
Логические элементы Аргументы Шепли в большом споре
Аргументы Шепли в большом споре Аттестационная работа. Образовательная программа с элементами проектной деятельности Человек в окружающем мире. (6 класс)
Аттестационная работа. Образовательная программа с элементами проектной деятельности Человек в окружающем мире. (6 класс) Методы анализа элементного состава материалов
Методы анализа элементного состава материалов Опиливание металла
Опиливание металла Кипение Удельная теплота парообразования Автор: Морозова Марина Валентиновна, учитель МОУ СОШ № 27 с УИОП г. Воронежа Предмет:
Кипение Удельная теплота парообразования Автор: Морозова Марина Валентиновна, учитель МОУ СОШ № 27 с УИОП г. Воронежа Предмет:  Электрическое поле
Электрическое поле Линии влияния. Лекция 2. Расчёт сооружений на действие подвижных и других временных нагрузок
Линии влияния. Лекция 2. Расчёт сооружений на действие подвижных и других временных нагрузок The Big Bang Theory
The Big Bang Theory Динамическое проектирование систем стабилизации летательных аппаратов. Исполнительные устройства. Рулевой привод
Динамическое проектирование систем стабилизации летательных аппаратов. Исполнительные устройства. Рулевой привод Действие жидкости и газа на погруженное в них тело 7 класс
Действие жидкости и газа на погруженное в них тело 7 класс Оптимизация программы для определения частоты аудиосигнала
Оптимизация программы для определения частоты аудиосигнала Вечный двигатель
Вечный двигатель