- Кинематическое исследование механизмов и машин

Содержание
- 2. Кинематика зубчатых передач
- 3. Кинематический анализ зубчатых механизмов
- 4. Основным кинематическим параметром зубчатых передаточное отношение – отношение угловых скоростей входного и выходного звеньев Внешнее зацепление
- 5. 2 2/ 3/ 4/ 5 O2 O5 1 O1 3 O3 4 O4 Для n колёс:
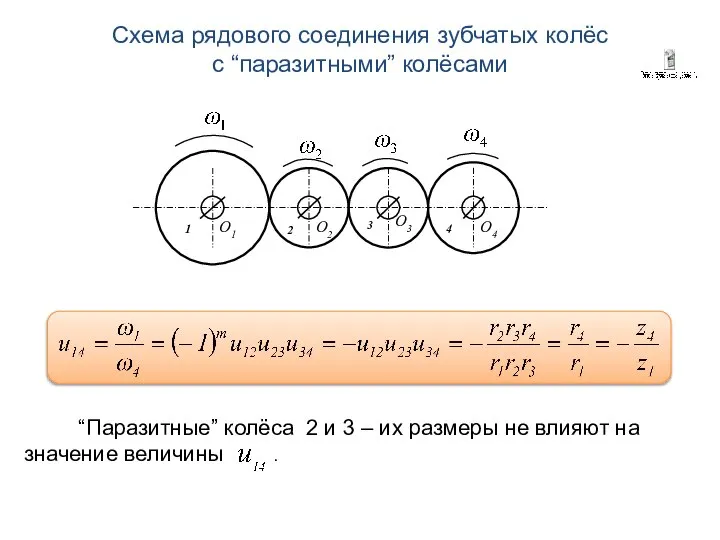
- 6. 2 O2 1 O1 O3 4 O4 3 “Паразитные” колёса 2 и 3 – их размеры
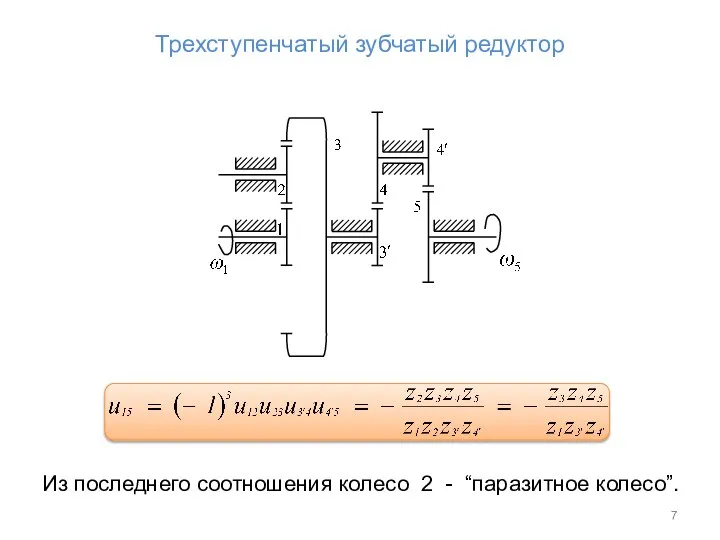
- 7. Трехступенчатый зубчатый редуктор Из последнего соотношения колесо 2 - “паразитное колесо”.
- 8. Механизмы с подвижными осями (Эпициклические механизмы) B некоторых многоступенчатых зубчатых передачах оси отдельных колес являются подвижными.
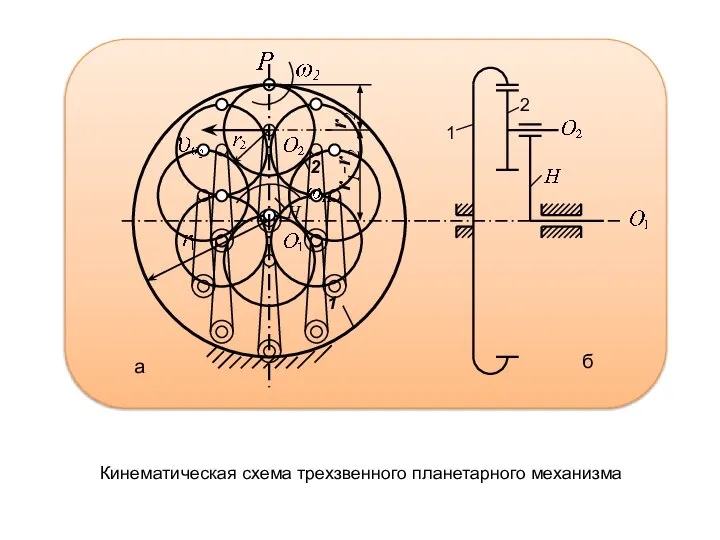
- 9. 1 H 2 r2 r1-r2 1 2 а б Кинематическая схема трехзвенного планетарного механизма
- 10. Связь между угловыми скоростями и может быть установлена из рассмотрения рисунка. Для точки O2 скорость является
- 11. Тогда уравнение (2) перепишем так: (3) Уравнение (3) может быть представлено еще так: (4) т. е.
- 12. На рисунке показан планетарный редуктор, который носит название редуктора Давида. Передаточное отношение от вала к валу
- 13. Схема трехзвенного планетарного механизма с кони-ческими колесами Редукторы Давида с малым передаточным отношением обладают очень малым
- 14. Схема четырехзвенного планетарного механизма типа Давида с внутренним зацеплением
- 15. На рисунке показана модификация редуктора Давида с сател-литом, входящим в два внутренних зацепления. Передаточное отношение от
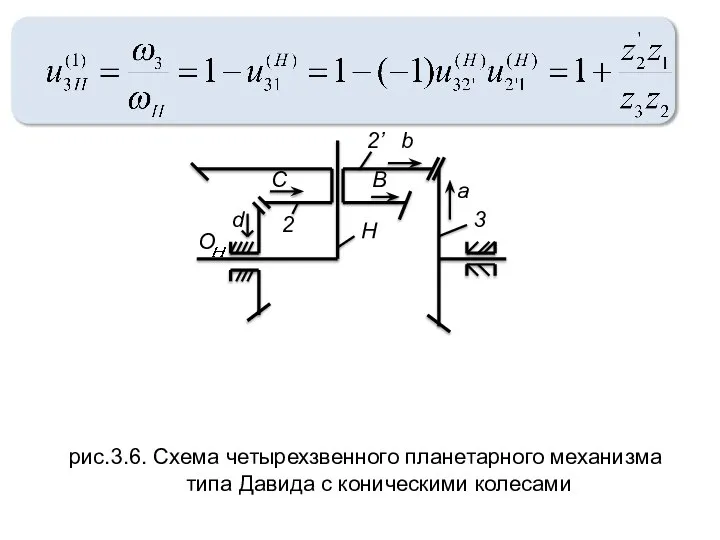
- 16. где и -соответственно числа зубьев колеса 1, 2, 2’и 3 На (рис.3.6.) показана модификация редуктора Давида
- 17. 3 2’ 2 H O a b B C d рис.3.6. Схема четырехзвенного планетарного механизма типа
- 19. Скачать презентацию

Кинематика зубчатых передач
Кинематика зубчатых передач

Кинематический анализ зубчатых механизмов
Кинематический анализ зубчатых механизмов

Основным кинематическим параметром зубчатых
передаточное отношение –
отношение угловых скоростей входного
Основным кинематическим параметром зубчатых
передаточное отношение –
отношение угловых скоростей входного

2
2/
3/
4/
5
O2
O5
1
O1
3
O3
4
O4
Для n колёс:
Рядовое соединение зубчатых колёс
Передаточное число с учётом направления вращения
2
2/
3/
4/
5
O2
O5
1
O1
3
O3
4
O4
Для n колёс:
Рядовое соединение зубчатых колёс
Передаточное число с учётом направления вращения
2
O2
1
O1
O3
4
O4
3
“Паразитные” колёса 2 и 3 – их размеры не влияют
2
O2
1
O1
O3
4
O4
3
“Паразитные” колёса 2 и 3 – их размеры не влияют
Трехступенчатый зубчатый редуктор
Из последнего соотношения колесо 2 - “паразитное колесо”.
Трехступенчатый зубчатый редуктор
Из последнего соотношения колесо 2 - “паразитное колесо”.
Механизмы с подвижными осями
(Эпициклические механизмы)
B некоторых многоступенчатых зубчатых передачах оси отдельных
Механизмы с подвижными осями
(Эпициклические механизмы)
B некоторых многоступенчатых зубчатых передачах оси отдельных
1
H
2
r2
r1-r2
1
2
а
б
Кинематическая схема трехзвенного планетарного механизма
1
H
2
r2
r1-r2
1
2
а
б
Кинематическая схема трехзвенного планетарного механизма

Связь между угловыми скоростями и может быть установлена из рассмотрения
Связь между угловыми скоростями и может быть установлена из рассмотрения
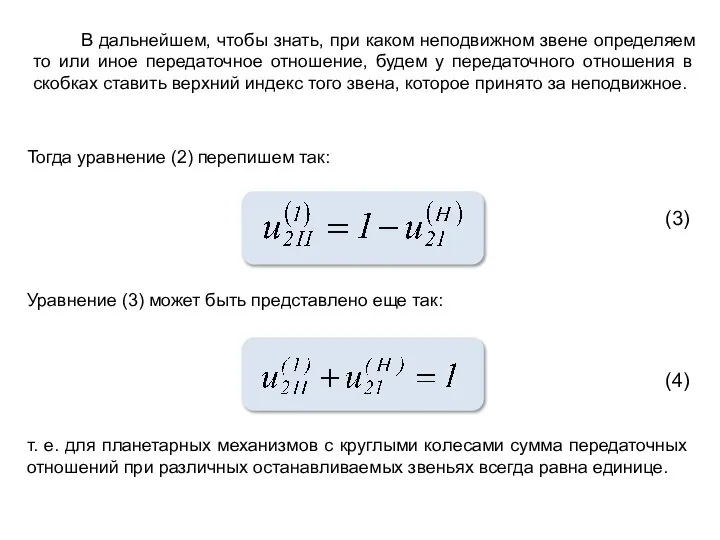
Тогда уравнение (2) перепишем так:
(3)
Уравнение (3) может быть представлено еще так:
(4)
т.
Тогда уравнение (2) перепишем так:
(3)
Уравнение (3) может быть представлено еще так:
(4)
т.
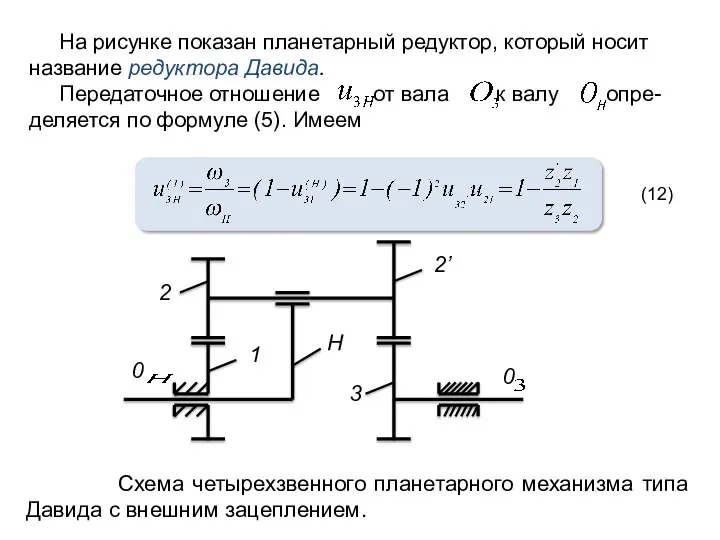
На рисунке показан планетарный редуктор, который носит название редуктора Давида.
На рисунке показан планетарный редуктор, который носит название редуктора Давида.
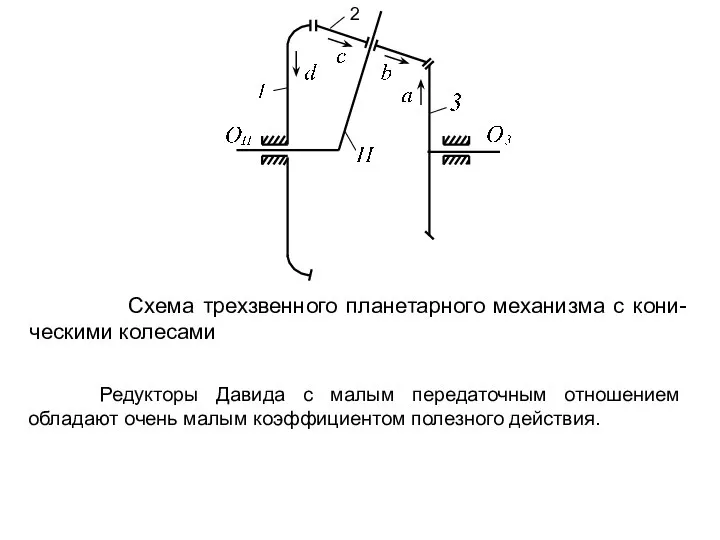
Схема трехзвенного планетарного механизма с кони-ческими колесами
Редукторы Давида с малым
Схема трехзвенного планетарного механизма с кони-ческими колесами
Редукторы Давида с малым
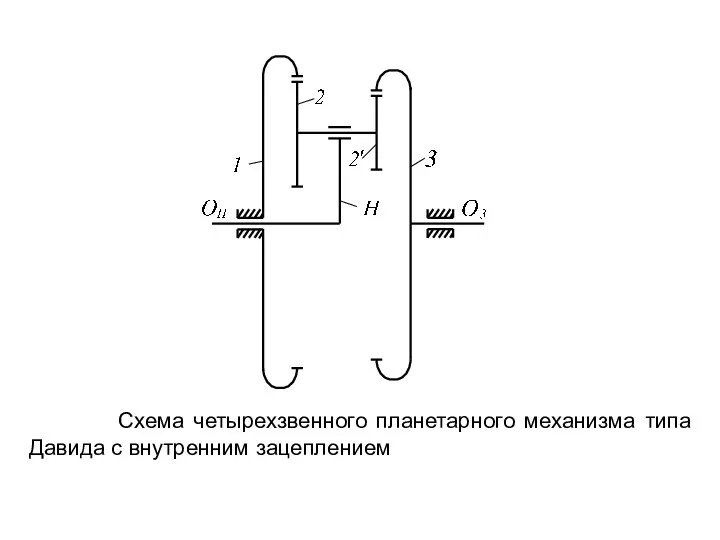
Схема четырехзвенного планетарного механизма типа Давида с внутренним зацеплением
Схема четырехзвенного планетарного механизма типа Давида с внутренним зацеплением
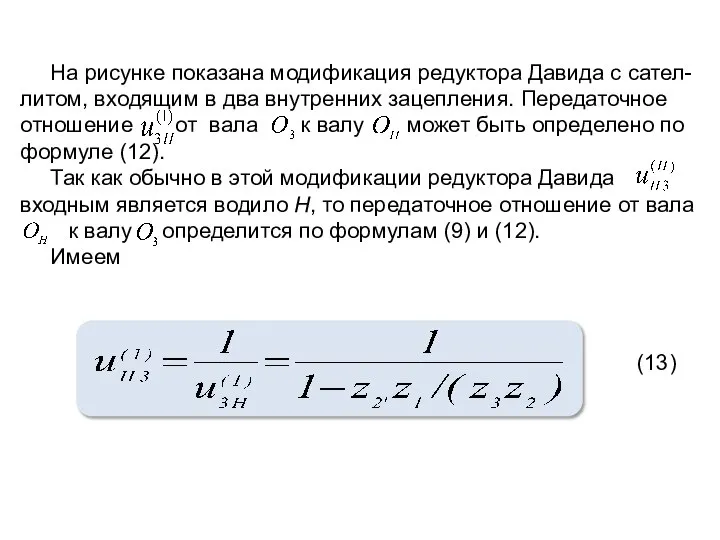
На рисунке показана модификация редуктора Давида с сател-литом, входящим в
На рисунке показана модификация редуктора Давида с сател-литом, входящим в

где и -соответственно числа зубьев колеса 1, 2, 2’и 3
где и -соответственно числа зубьев колеса 1, 2, 2’и 3
3
2’
2
H
O
a
b
B
C
d
рис.3.6. Схема четырехзвенного планетарного механизма типа Давида с коническими колесами
3
2’
2
H
O
a
b
B
C
d
рис.3.6. Схема четырехзвенного планетарного механизма типа Давида с коническими колесами
 Электростатика. Электрический заряд. Элементарные частицы. Лекция 8
Электростатика. Электрический заряд. Элементарные частицы. Лекция 8 Расчет бруса круглого поперечного сечения при сочетании основных деформаций. Тема 2.7
Расчет бруса круглого поперечного сечения при сочетании основных деформаций. Тема 2.7 Видимость. Атмосферная видимость
Видимость. Атмосферная видимость Валы и оси
Валы и оси Короткое замыкание
Короткое замыкание Увеличительные приборы. Строение растительной клетки
Увеличительные приборы. Строение растительной клетки Блоки. Похила площина. підготувала
Блоки. Похила площина. підготувала  Свободные и вынужденные колебания. Условия возникновения колебаний
Свободные и вынужденные колебания. Условия возникновения колебаний Вынужденные колебания системы с одной степенью свободы
Вынужденные колебания системы с одной степенью свободы Проста модель освітлення
Проста модель освітлення Динамика пассивного космического объекта при его бесконтактной транспортировке ионным потоком
Динамика пассивного космического объекта при его бесконтактной транспортировке ионным потоком Работа по перемещению зарядов
Работа по перемещению зарядов Аттестационная работа. Образовательная программа элективного курса Физика и экология
Аттестационная работа. Образовательная программа элективного курса Физика и экология Волноводы с волнами типа Т. Лекция 11
Волноводы с волнами типа Т. Лекция 11 Расчет и анализ электромагнитных полей элементарных излучателей
Расчет и анализ электромагнитных полей элементарных излучателей Источники света. Виды люминесценции
Источники света. Виды люминесценции Теория компульсивных циклов
Теория компульсивных циклов Расчет изменения внутренней энергии
Расчет изменения внутренней энергии Электротехника и электроника
Электротехника и электроника Основы электронной оптики
Основы электронной оптики Инфразвук Звуки, издаваемые камнями. Ультразвук
Инфразвук Звуки, издаваемые камнями. Ультразвук Подготовила Ученица 9 «А» класса Ярославцева Дарья
Подготовила Ученица 9 «А» класса Ярославцева Дарья Обратимые и необратимые термодинамические процессы. (Лекция 8)
Обратимые и необратимые термодинамические процессы. (Лекция 8) Подготовка к ЕГЭ по физике
Подготовка к ЕГЭ по физике Аттестационная работа. Проектная деятельность по физике
Аттестационная работа. Проектная деятельность по физике Насыщенный пар. Зависимость давления насыщенного пара от температуры. Влажность
Насыщенный пар. Зависимость давления насыщенного пара от температуры. Влажность Електричний струм – упорядковий рух зарядженних частинок
Електричний струм – упорядковий рух зарядженних частинок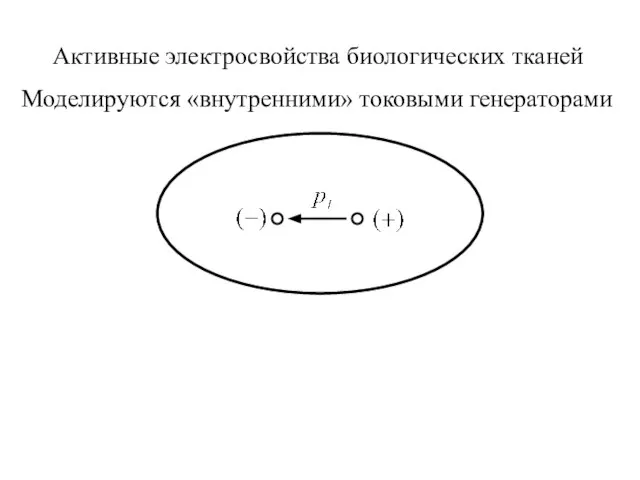 Активные электросвойства биологических тканей
Активные электросвойства биологических тканей