- Микропроцессорные системы управления. Основные понятия

Содержание
- 2. Физический процесс — это последовательная смена состояний объектов физического мира. Физическими процессами являются: движение; химические реакции;
- 3. Технический процесс – это физический процесс, параметры которого можно измерить и изменить техническими средствами. Технический процесс
- 4. Обобщенная модель ФИЗИЧЕСКОГО/ТЕХНИЧЕСКОГО процесса Информация – важнейший компонент управления физическим процессом Обработка информации производится решающим устройством
- 5. Примеры входных и выходных потоков процесса
- 6. Применение компьютера в управлении процессом Компьютеры выполняют две основные функции: Контроль нахождения параметров технического процесса в
- 7. Отличие задачи УПРАВЛЕНИЯ ТЕХНИЧЕСКИМ ПРОЦЕССОМ от задачи ОБРАБОТКИ ДАННЫХ ОБРАБОТКА ДАННЫХ применяется в таких приложениях, как:
- 8. Понятие технической системы СИСТЕМА – это любой объект, который рассматривается, с одной стороны, как единое целое,
- 9. Физический процесс контролируется с помощью датчиков (измерительных преобразователей). ДАТЧИК − это устройство, преобразующее физические параметры процесса
- 10. Цифровая система управления физическим/техническим процессом Система цифрового управления физическим/техническим процессом состоит из следующих компонентов: Датчики и
- 11. Назначение управляющего компьютера Интерпретирует все поступающие от физического/технического процесса данные. Принимает решения в соответствии с алгоритмами
- 12. Задачи решаемые управляющим компьютером при управлении техническим процессом Основное требование к системе управления заключается в том,
- 13. Отличие управляющего компьютера от обычного Управление техническими процессами всегда происходит в реальном времени. Понятие "реальное время"
- 14. Свойства процессов, усложняющие управление Уровень сложности системы управления определяется, в первую очередь, свойствами управляемого процесса. Факторы
- 15. Примеры реальных физических процессов Механика. Зависимость между силой реакции и удлинением пружины в механических системах часто
- 16. Внутренние взаимодействия технического процесса Любой технический процесс можно представить как систему с внутренними связями, которая изменяет
- 17. Характеристики управляемого технического процесса влияющие на решения по системе управления
- 19. Отображение развития процесса во времени Данные полученные в результате измерений, должны адекватно, с требуемой точностью отображать
- 20. Сбор данных измерений и обработка сигналов Все сигналы измерений содержат как полезную информацию, так и помехи.
- 21. Распределенное прямое цифровое управление Распределенное прямое цифровое управление − это иерархическая структура на базе соединенных между
- 22. Интерфейс оператора Теоретически управляющая система может функционировать без вмешательства человека, но всегда необходимо взаимодействие управляющей системы
- 23. Заключение Для задач управления в режиме реального времени нельзя применять обычные методы программирования из-за особенностей, присущих
- 25. Скачать презентацию
Физический процесс — это последовательная смена состояний объектов физического мира.
Физическими
Физический процесс — это последовательная смена состояний объектов физического мира.
Физическими
Технический процесс – это физический процесс, параметры которого можно измерить и
Технический процесс – это физический процесс, параметры которого можно измерить и
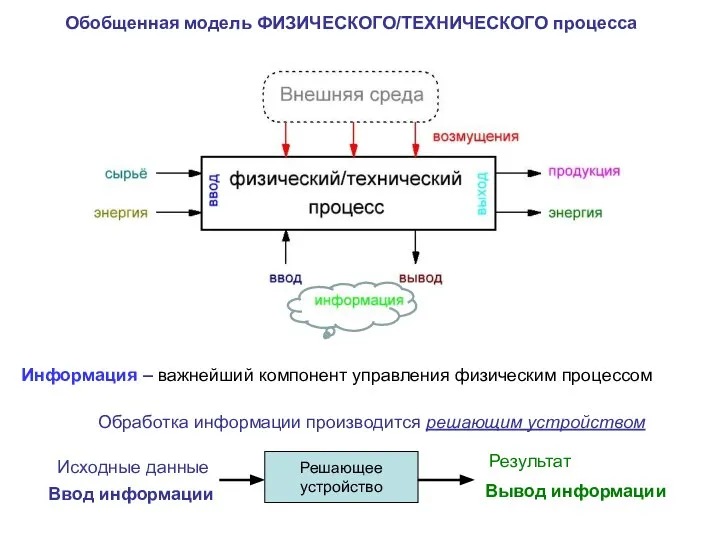
Обобщенная модель ФИЗИЧЕСКОГО/ТЕХНИЧЕСКОГО процесса
Информация – важнейший компонент управления физическим процессом
Обработка информации
Обобщенная модель ФИЗИЧЕСКОГО/ТЕХНИЧЕСКОГО процесса
Информация – важнейший компонент управления физическим процессом
Обработка информации

Примеры входных и выходных потоков процесса
Примеры входных и выходных потоков процесса
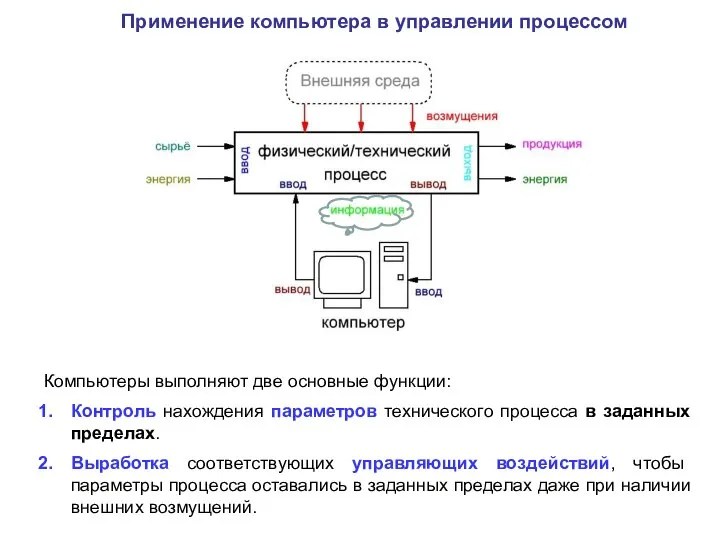
Применение компьютера в управлении процессом
Компьютеры выполняют две основные функции:
Контроль нахождения параметров
Применение компьютера в управлении процессом
Компьютеры выполняют две основные функции:
Контроль нахождения параметров
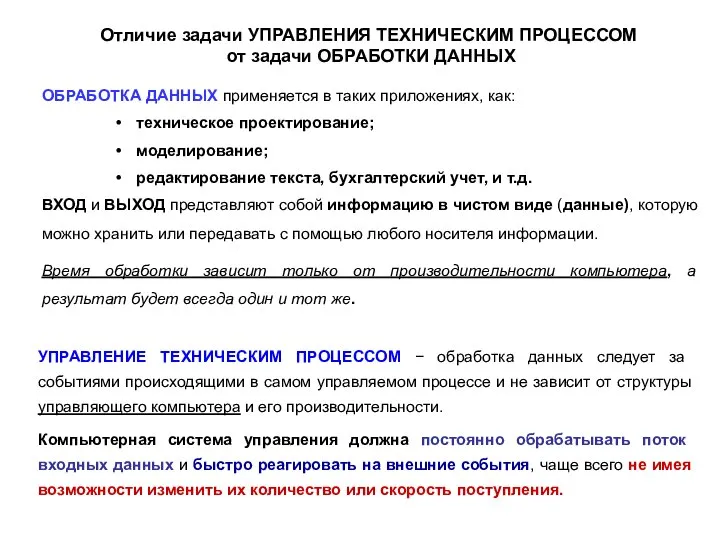
Отличие задачи УПРАВЛЕНИЯ ТЕХНИЧЕСКИМ ПРОЦЕССОМ
от задачи ОБРАБОТКИ ДАННЫХ
ОБРАБОТКА ДАННЫХ применяется
Отличие задачи УПРАВЛЕНИЯ ТЕХНИЧЕСКИМ ПРОЦЕССОМ
от задачи ОБРАБОТКИ ДАННЫХ
ОБРАБОТКА ДАННЫХ применяется

Понятие технической системы
СИСТЕМА – это любой объект, который рассматривается, с одной
Понятие технической системы
СИСТЕМА – это любой объект, который рассматривается, с одной
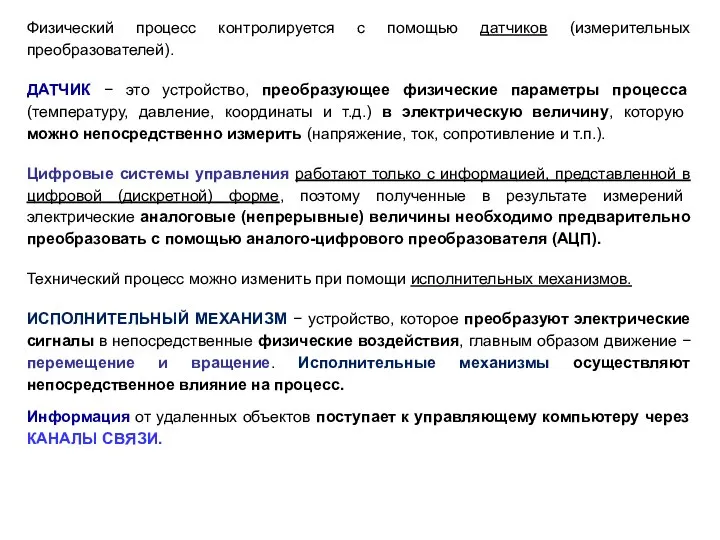
Физический процесс контролируется с помощью датчиков (измерительных преобразователей).
ДАТЧИК − это
Физический процесс контролируется с помощью датчиков (измерительных преобразователей).
ДАТЧИК − это

Цифровая система управления физическим/техническим процессом
Система цифрового управления физическим/техническим процессом состоит из
Цифровая система управления физическим/техническим процессом
Система цифрового управления физическим/техническим процессом состоит из
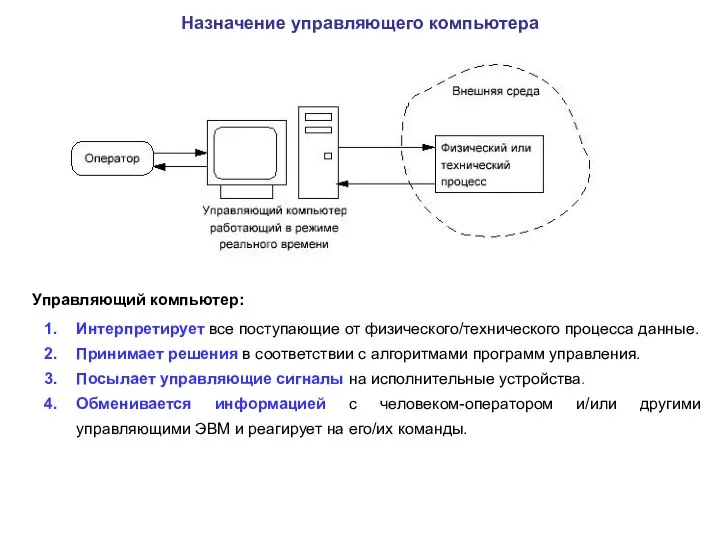
Назначение управляющего компьютера
Интерпретирует все поступающие от физического/технического процесса данные.
Принимает решения
Назначение управляющего компьютера
Интерпретирует все поступающие от физического/технического процесса данные.
Принимает решения

Задачи решаемые управляющим компьютером
при управлении техническим процессом
Основное требование к
Задачи решаемые управляющим компьютером
при управлении техническим процессом
Основное требование к
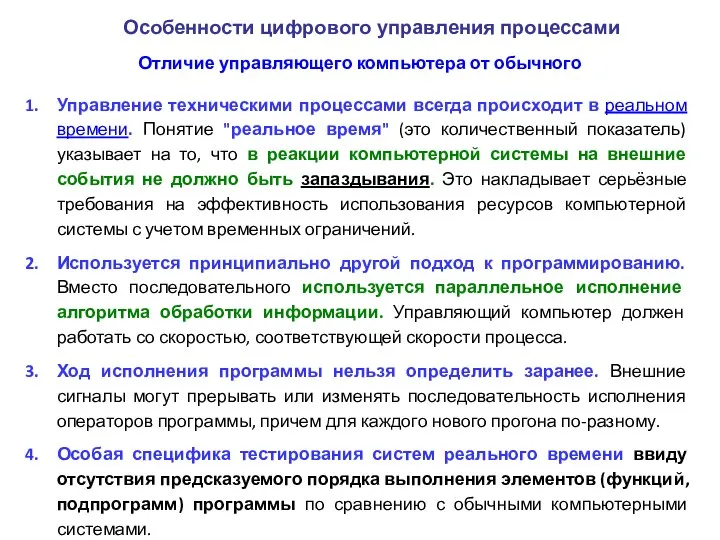
Отличие управляющего компьютера от обычного
Управление техническими процессами всегда происходит в реальном
Отличие управляющего компьютера от обычного
Управление техническими процессами всегда происходит в реальном
Свойства процессов, усложняющие управление
Уровень сложности системы управления определяется, в первую очередь,
Свойства процессов, усложняющие управление
Уровень сложности системы управления определяется, в первую очередь,

Примеры реальных физических процессов
Механика. Зависимость между силой реакции и удлинением пружины
Примеры реальных физических процессов
Механика. Зависимость между силой реакции и удлинением пружины
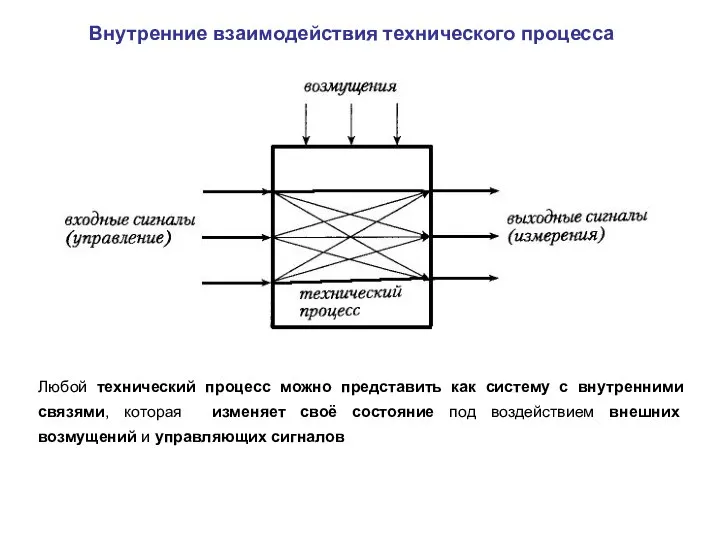
Внутренние взаимодействия технического процесса
Любой технический процесс можно представить как систему с
Внутренние взаимодействия технического процесса
Любой технический процесс можно представить как систему с

Характеристики управляемого технического процесса
влияющие на решения по системе управления
Характеристики управляемого технического процесса
влияющие на решения по системе управления

Отображение развития процесса во времени
Данные полученные в результате измерений, должны адекватно,
Отображение развития процесса во времени
Данные полученные в результате измерений, должны адекватно,
Сбор данных измерений и обработка сигналов
Все сигналы измерений содержат как полезную
Сбор данных измерений и обработка сигналов
Все сигналы измерений содержат как полезную
Распределенное прямое цифровое управление
Распределенное прямое цифровое управление − это иерархическая структура
Распределенное прямое цифровое управление
Распределенное прямое цифровое управление − это иерархическая структура
Интерфейс оператора
Теоретически управляющая система может функционировать без вмешательства человека, но всегда
Интерфейс оператора
Теоретически управляющая система может функционировать без вмешательства человека, но всегда
Заключение
Для задач управления в режиме реального времени нельзя применять обычные методы
Заключение
Для задач управления в режиме реального времени нельзя применять обычные методы
 Гидравлический удар. Описание процесса
Гидравлический удар. Описание процесса Введение в курс ГГД. Основные понятия и предмет изучения курса ГГД
Введение в курс ГГД. Основные понятия и предмет изучения курса ГГД Постулаты общей теории относительности. (Часть 3)
Постулаты общей теории относительности. (Часть 3) Физические основы воздействия на атмосферные процессы. Реагенты
Физические основы воздействия на атмосферные процессы. Реагенты Вынужденные колебания системы с одной степенью свободы
Вынужденные колебания системы с одной степенью свободы Обратные полюсные фигуры (ОПФ)
Обратные полюсные фигуры (ОПФ) Трансформатор
Трансформатор Коллоидтық жүйелердің оптикалық қасиеттері
Коллоидтық жүйелердің оптикалық қасиеттері Движение с постоянным ускорением
Движение с постоянным ускорением Электрические явления. Заряд
Электрические явления. Заряд Электростатика. Электродинамика
Электростатика. Электродинамика Відкриття атомного ядра
Відкриття атомного ядра История создания ядерного оружия. Испытания ядерного оружия.
История создания ядерного оружия. Испытания ядерного оружия.  Автомобіль і люди
Автомобіль і люди Фотоэффект и его законы
Фотоэффект и его законы Статика. Виды равновесия. Равновесие тел имеющих площадь опоры. Законы равновесия. (10 класс)
Статика. Виды равновесия. Равновесие тел имеющих площадь опоры. Законы равновесия. (10 класс) Топливо и топливосжигающие устройства. Конструкции горелок
Топливо и топливосжигающие устройства. Конструкции горелок Презентация по физике "Электротехника" - скачать бесплатно
Презентация по физике "Электротехника" - скачать бесплатно Структурный анализ и синтез механизмов
Структурный анализ и синтез механизмов Термоэлектрические материалы. Современное состояние и пути повышения их эффективности
Термоэлектрические материалы. Современное состояние и пути повышения их эффективности Презентация РАВНОМЕРНОЕ ДВИЖЕНИЕ Механическое движение: перемещение, скорость, ускорение
Презентация РАВНОМЕРНОЕ ДВИЖЕНИЕ Механическое движение: перемещение, скорость, ускорение Сложение скоростей в релятивистской механике
Сложение скоростей в релятивистской механике Предмет гидравлики. Основные свойства жидкости. Гидростатика
Предмет гидравлики. Основные свойства жидкости. Гидростатика Равновесие твердого тела. Решение задач
Равновесие твердого тела. Решение задач Авиационные преобразователи электрической энергии
Авиационные преобразователи электрической энергии Проектирование СТО для автомобилей японских марок с функцией дополнительных услуг, нанесение антигравийной пленки
Проектирование СТО для автомобилей японских марок с функцией дополнительных услуг, нанесение антигравийной пленки Открытие нейтрона
Открытие нейтрона Своя игра 2
Своя игра 2