- Основные понятия и определения теоретической механики

Содержание
- 2. Содержание Лекция 1 - Основные понятия и определения теоретической механики Лекция 2 – Виды связей и
- 3. Лекция 1 Теоретическая механика - это наука о наиболее общих законах механического движения и равновесия материальных
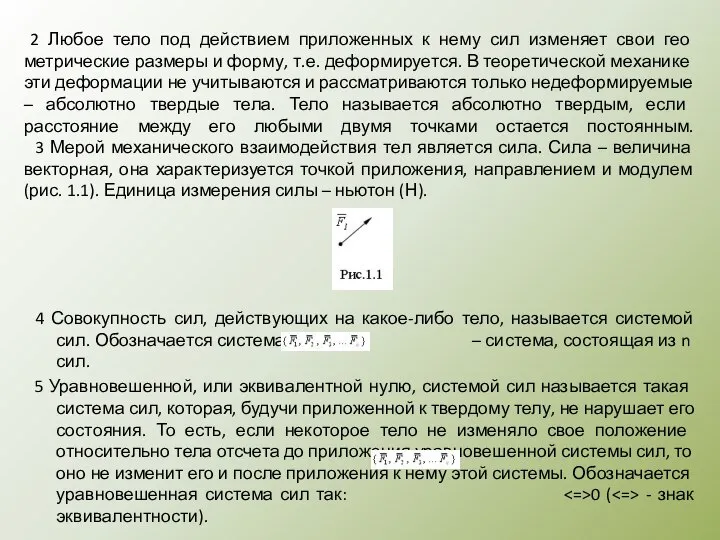
- 4. 2 Любое тело под действием приложенных к нему сил изменяет свои геометрические размеры и форму, т.е.
- 5. 6 Если к некоторому телу приложена система сил и к нему прикладываем еще одну систему сил
- 6. Рис. 1.2 Рис. 1.3 Аксиома 3. Две силы, приложенные в одной точке тела, эквивалентны равнодействующей, приложенной
- 7. Следствия из аксиом Следствие 1. Силу, приложенную к абсолютно твердому телу, можно переносить в любую точку
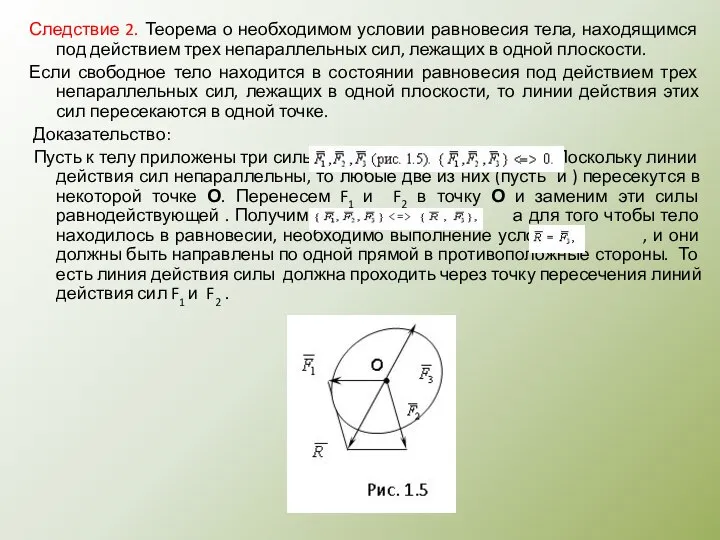
- 8. Следствие 2. Теорема о необходимом условии равновесия тела, находящимся под действием трех непараллельных сил, лежащих в
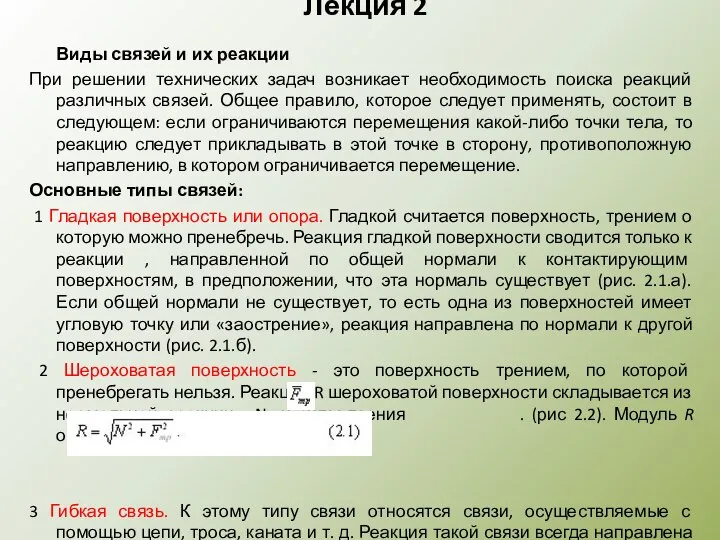
- 9. Лекция 2 Виды связей и их реакции При решении технических задач возникает необходимость поиска реакций различных
- 10. 4 Цилиндрический шарнир (рис. 2.4) и подшипник (опора В рис.2.5). Цилиндрическим шарниром называется соединение двух или
- 11. 6 Шарнирно-подвижная опора. Этот вид связи конструктивно выполняется в виде цилиндрического шарнира, который может свободно перемещаться
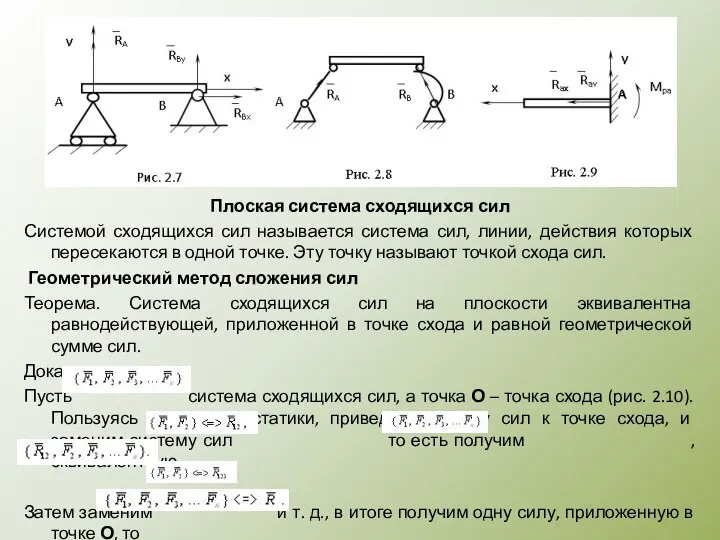
- 12. Плоская система сходящихся сил Системой сходящихся сил называется система сил, линии, действия которых пересекаются в одной
- 13. Рис. 2.10 Аналитический способ нахождения равнодействующей Геометрический способ нахождения равнодействующей системы сил сопряжен с определенными трудностями,
- 14. Модуль равнодействующей равен: Направляющие косинусы вектора R можно найти по формулам: Условие равновесия системы сходящихся сил
- 15. В аналитической форме: Для равновесия свободного твердого тела, находящегося под действием плоской сходящейся системы сил необходимо
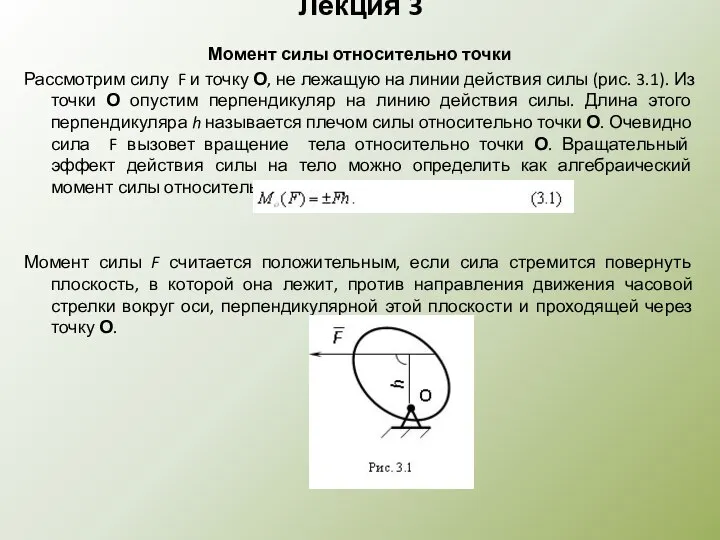
- 16. Лекция 3 Момент силы относительно точки Рассмотрим силу F и точку О, не лежащую на линии
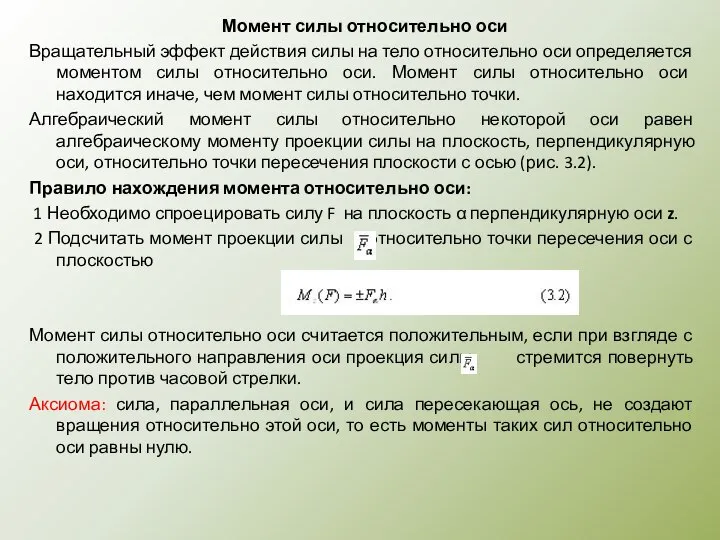
- 17. Момент силы относительно оси Вращательный эффект действия силы на тело относительно оси определяется моментом силы относительно
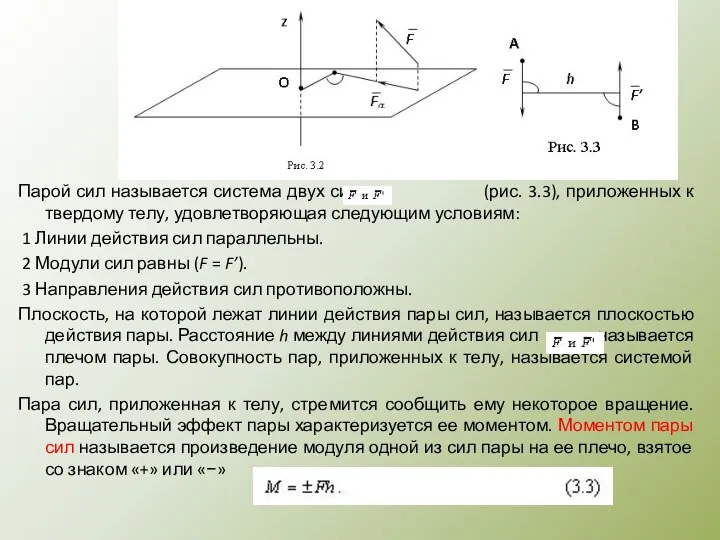
- 18. Пара сил. Момент пары сил на плоскости Парой сил называется система двух сил (рис. 3.3), приложенных
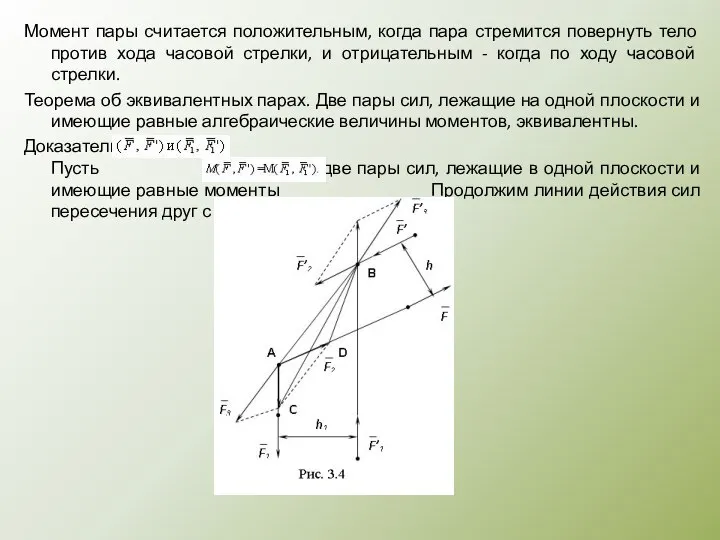
- 19. Момент пары считается положительным, когда пара стремится повернуть тело против хода часовой стрелки, и отрицательным -
- 20. Перенесем силы по линиям действия в точки А и В и разложим каждую из них на
- 21. Теорема о сложении пар сил. Пары сил, лежащие в одной плоскости можно складывать. В результате сложения
- 22. Рис. 3.5 Равновесие рычага Рычагом называется твердое тело, вращающееся вокруг неподвижной оси и находящееся под действием
- 23. Рис. 3.6 Рис. 3.7 Сложим все силы, направленные вверх: , и вниз: , соответственно. Найти точки
- 24. В итоге возможны три случая: 1) , тогда система сводится к одной равнодействующей. 2) - система
- 25. Рис. 3.8 Рис. 3.9 Приведение произвольной плоской системы сил к точке (основная теорема статики для произвольной
- 26. Теорема Вариньона. Если система сил приводится к равнодействующей, то момент равнодействующей относительно любой точки равен сумме
- 27. Следствия из теоремы: 1. Главный вектор не изменится при изменении центра приведения. 2. Главный момент при
- 28. Лекция 4 Кинематика В кинематике изучается движение материальных тел в пространстве с геометрической точки зрения, без
- 29. Рис. 4.1 в) указать закон движения точки S=f(t), а также начало отсчета времени t0. Функция S=f(t)
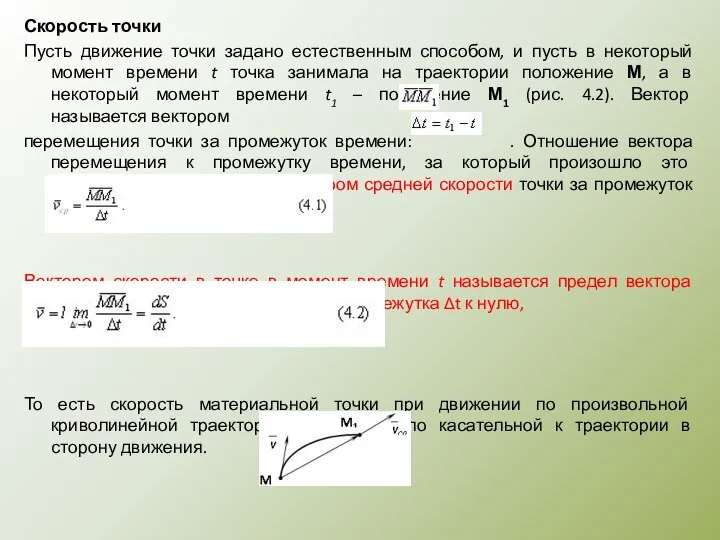
- 30. Скорость точки Пусть движение точки задано естественным способом, и пусть в некоторый момент времени t точка
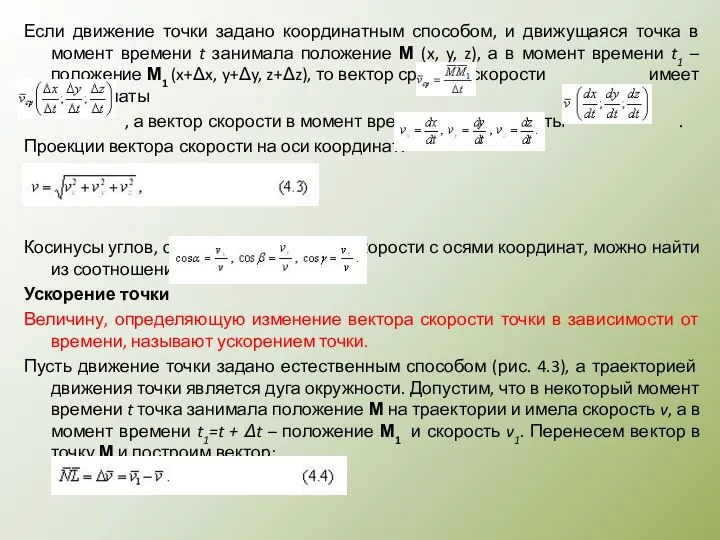
- 31. Если движение точки задано координатным способом, и движущаяся точка в момент времени t занимала положение М
- 32. Вектор Δν называется вектором приращения скорости. Вектор равен отношению приращения скорости Δν к соответствующему приращению времени
- 33. Вычислим первый предел. Для этого введем на касательной к траектории движения точки в точке М единичный
- 34. Модуль и направляющие косинусы полного ускорения найдутся по формулам: где α - угол между направлением вектора
- 35. Лекция 5 Виды движения точки в зависимости от ускорения Прямолинейное движение. В этом случае траектория движения
- 36. Кинематика движения твердого тела При произвольном движении твердого тела отдельные его точки движутся по различным траекториям
- 37. Рис. 5.1 Обозначим через А1, В1 и А2, В2 положения, которые занимают точки А и В
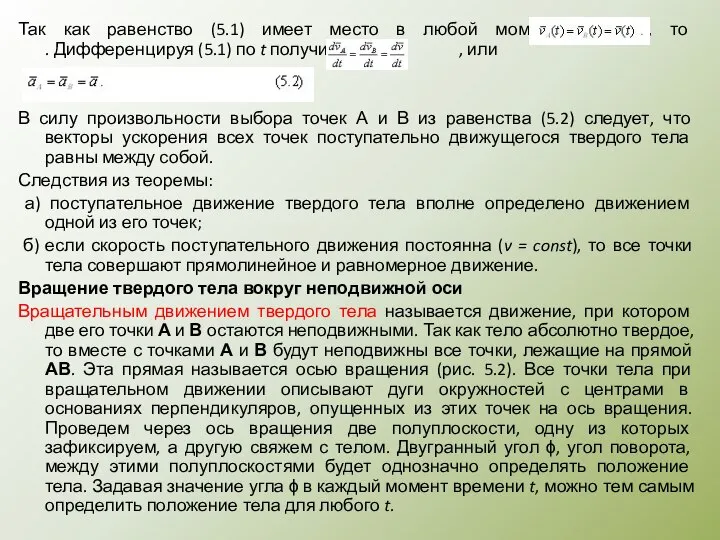
- 38. Так как равенство (5.1) имеет место в любой момент времени, то . Дифференцируя (5.1) по t
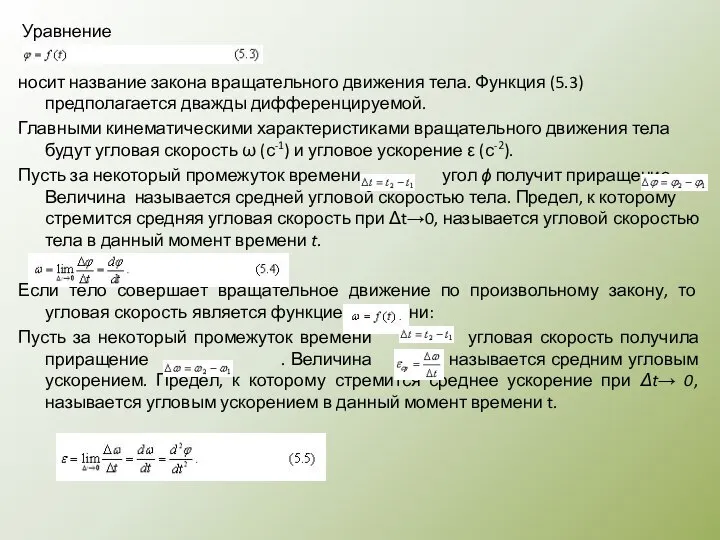
- 39. Уравнение носит название закона вращательного движения тела. Функция (5.3) предполагается дважды дифференцируемой. Главными кинематическими характеристиками вращательного
- 40. Рис. 5.2 Рис. 5.3 Связь угловых характеристик вращающегося твердого тела с линейными кинематическими характеристиками вращающегося тела
- 41. Продифференцировав (5.6) по времени, определим алгебраическую величину касательного ускорения: Нормальное ускорение получим, подставляя (5.6) в выражение
- 42. На рис. 5.4 изображены две системы координат: неподвижная Oxyz и подвижная O1x1y1z1. Движение, совершаемое точкой М
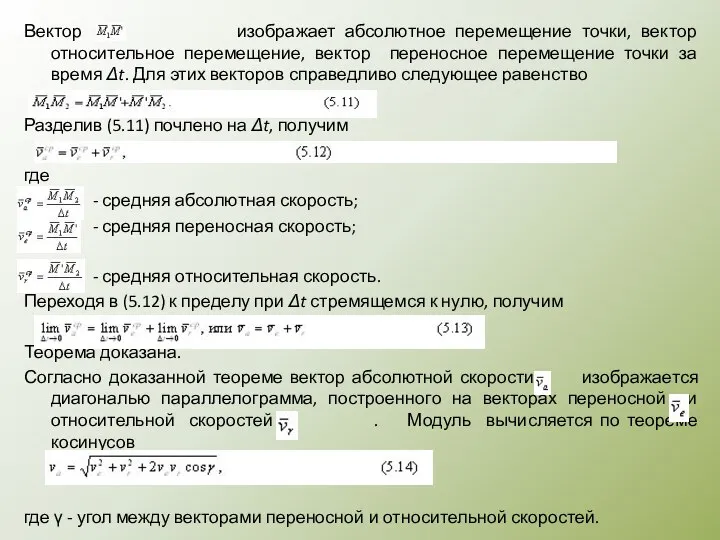
- 43. Теорема о скорости точки в сложном движении. Вектор абсолютной скорости точки в данный момент времени равен
- 44. Вектор изображает абсолютное перемещение точки, вектор относительное перемещение, вектор переносное перемещение точки за время Δt. Для
- 45. Понятие о плоскопараллельном движении твердого тела Движение твердого тела называется плоскопараллельным, если все точки тела перемещаются
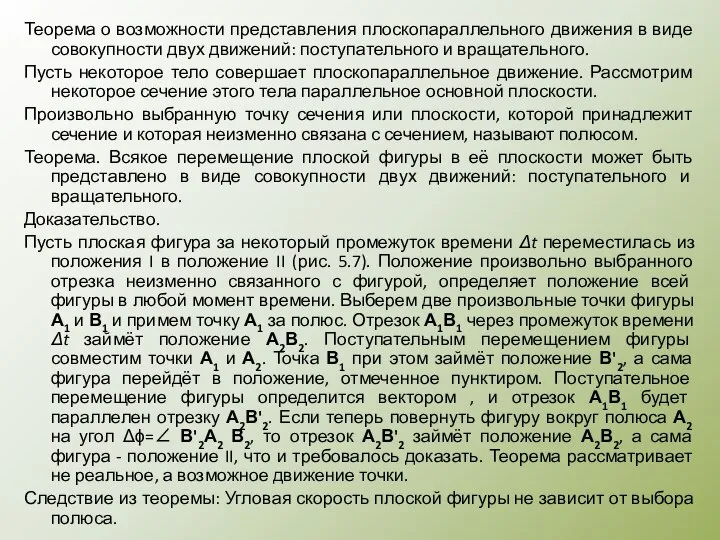
- 46. Теорема о возможности представления плоскопараллельного движения в виде совокупности двух движений: поступательного и вращательного. Пусть некоторое
- 47. Скорость точки плоской фигуры Теорема. Скорость любой точки В плоской фигуры в данный момент времени есть
- 48. На основании теоремы о скорости точки в сложном движении имеем В этом выражении так как переносное
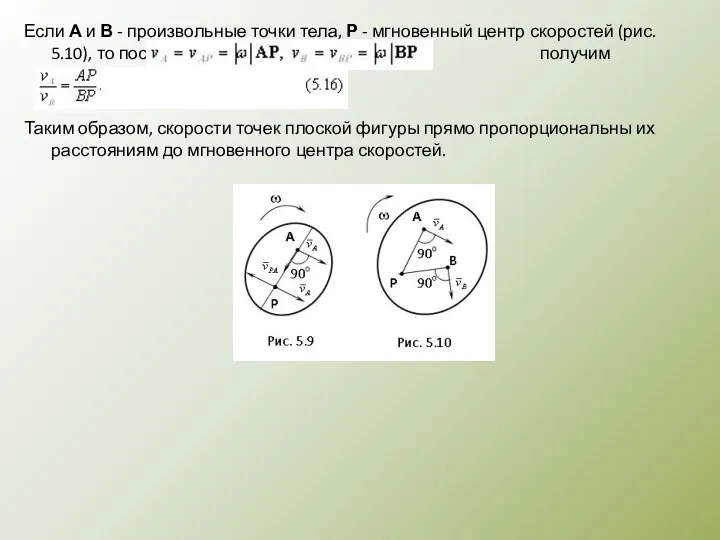
- 49. Если А и В - произвольные точки тела, Р - мгновенный центр скоростей (рис. 5.10), то
- 50. Лекция 6 Динамика Динамика – раздел теоретической механики, изучающий движение материальных объектов и причины его вызывающие.
- 51. Таким образом, причиной возникновения движения является сила. Закон равенства действия и противодействия. Две материальные точки действуют
- 52. Рис. 6.1 Вектор Ф, направленный в сторону противоположную ускорению точки, и по модулю равный произведению массы
- 53. Знак «+» берется в случае, когда направления силы и перемещения совпадают, знак «−» - когда эти
- 54. Работа силы на криволинейном участке Рассмотрим общий случай нахождения работы переменной силы, точка приложения которой движется
- 55. Рис. 6.2 Рис. 6.3 Теорема. Работа равнодействующей системы сил на некотором пути равна сумме работ составляющих
- 56. Поскольку окончательно имеем: что и требовалось доказать.
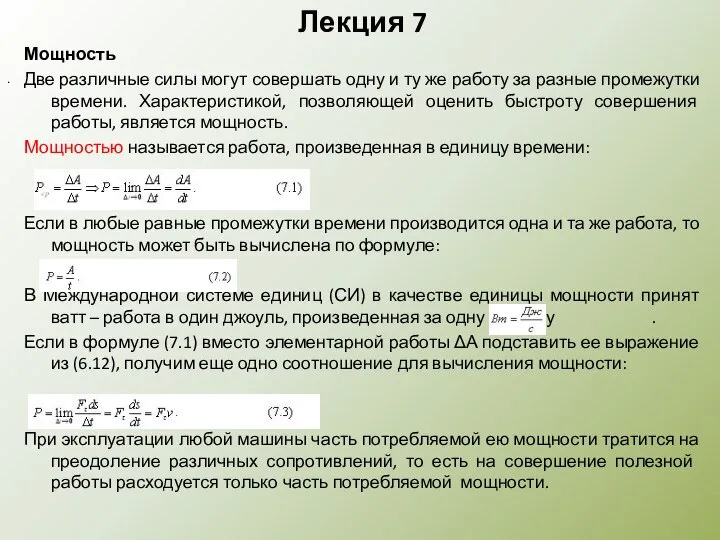
- 57. Лекция 7 Мощность Две различные силы могут совершать одну и ту же работу за разные промежутки
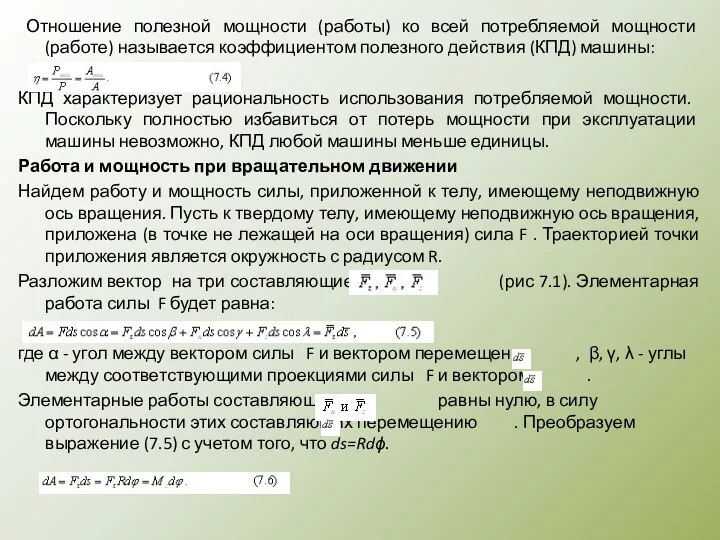
- 58. Отношение полезной мощности (работы) ко всей потребляемой мощности (работе) называется коэффициентом полезного действия (КПД) машины: КПД
- 59. Для определения мощности силы F подставим выражение элементарной работы (7.6) в формулу (7.3). Получим: так как
- 60. Понятие о трении. Трение скольжения Сопротивление, возникающее при скольжении одного тела по поверхности другого, называется трением
- 61. Исследованием явления трения занимался еще Леонардо да Винчи. Ввиду значения, которое имеет явление трения в технической
- 62. Сила трения скольжения в движении пропорциональна нормальному давлению одного тела на другое: где f’ – коэффициент
- 63. Эта пара, препятствующая качению катка, называется парой трения качения. Возникновение этой пары объясняется тем, что вследствие
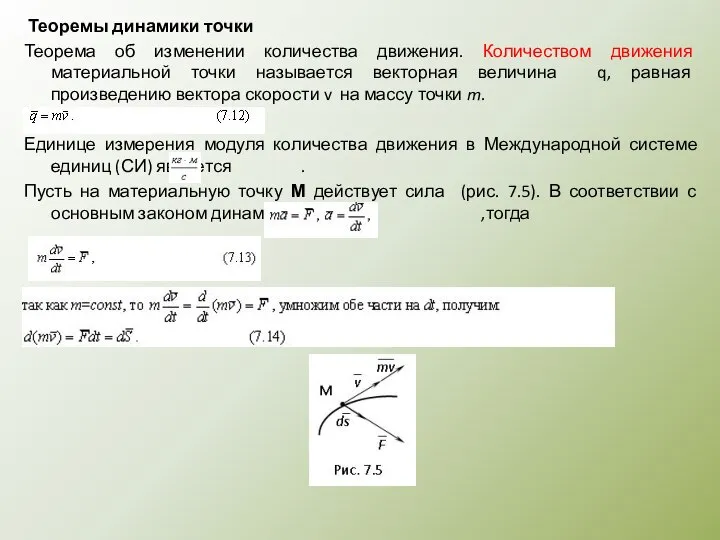
- 64. Теоремы динамики точки Теорема об изменении количества движения. Количеством движения материальной точки называется векторная величина q,
- 65. Произведение силы F на малое приращение времени dt, в течение которого эта сила действует, называется элементарным
- 66. Лекция 8 Кинетическая энергия Кроме количества движения основной мерой механического движения является кинетическая энергия. Кинетической энергией
- 67. Потенциальная энергия Часть (ограниченная или неограниченная) пространства, в каждой точке которого на находящуюся там материальную точку
- 68. то есть работа силы потенциального поля равна разности значений силовой функции в конечной и начальной точках
- 69. где v1 и v2 – скорости движущейся точки в положениях М1 и М2. Но так как
- 70. Кинетическая энергия материального тела в различных видах движения Материальное тело есть совокупность отдельных материальных точек. Кинетическая
- 71. Теорема Кенига. Кинетическая энергия тела, совершающего плоскопараллельное движение, равна сумме кинетических энергий поступательного движения тела со
- 72. Для этого разобьем всю окружность на бесконечно малые элементы массой m. Все элементы находятся от точки
- 73. 3. Круглый цилиндр радиуса R, массой М. Разобьем весь цилиндр на тонкие диски. Момент инерции диска
- 74. Объем сферы равен: масса сферы: тогда момент инерции шара равен: Подставляя значение ρ, получим: Дифференциальное уравнение
- 75. По аналогии можно записать дифференциальное уравнение вращательного движения тела в виде: где Iz – момент инерции
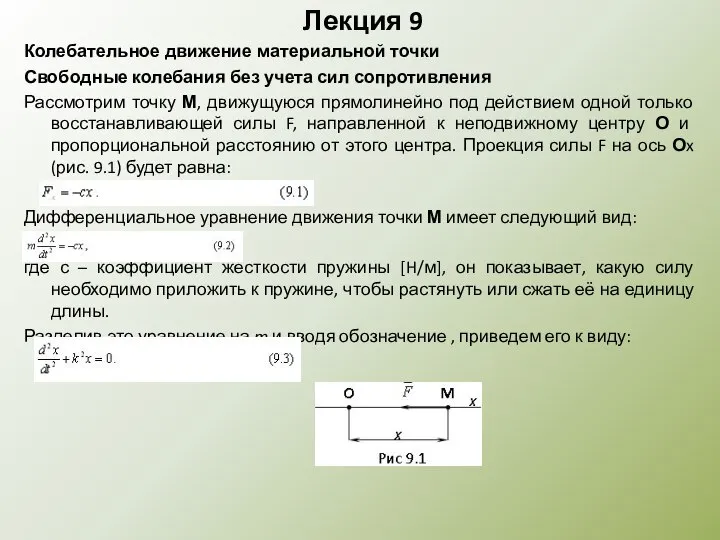
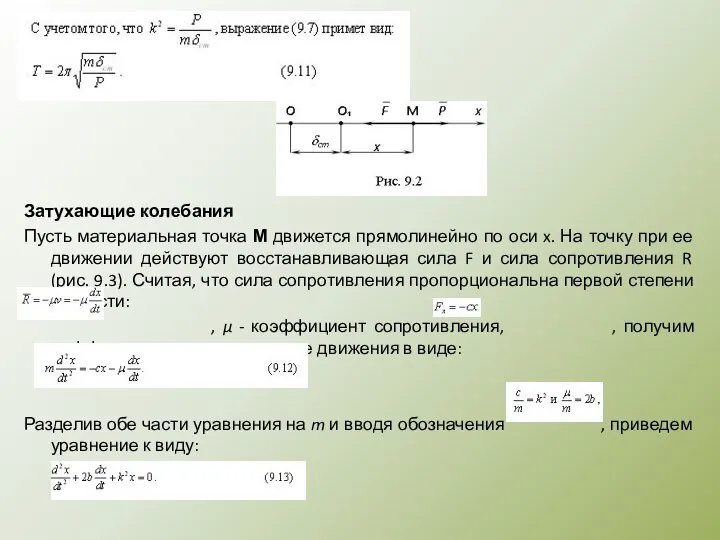
- 76. Лекция 9 Колебательное движение материальной точки Свободные колебания без учета сил сопротивления Рассмотрим точку М, движущуюся
- 77. Уравнение (9.3) представляет собой дифференциальное уравнение свободных колебаний при отсутствии сопротивления. Решение этого линейного однородного дифференциального
- 78. Промежуток времени Т, в течение которого точка совершает одно полное колебание, называется периодом колебаний. По истечении
- 79. Итак, свободные колебания при отсутствии сопротивления обладают следующими свойствами: 1 амплитуда и начальная фаза колебаний зависят
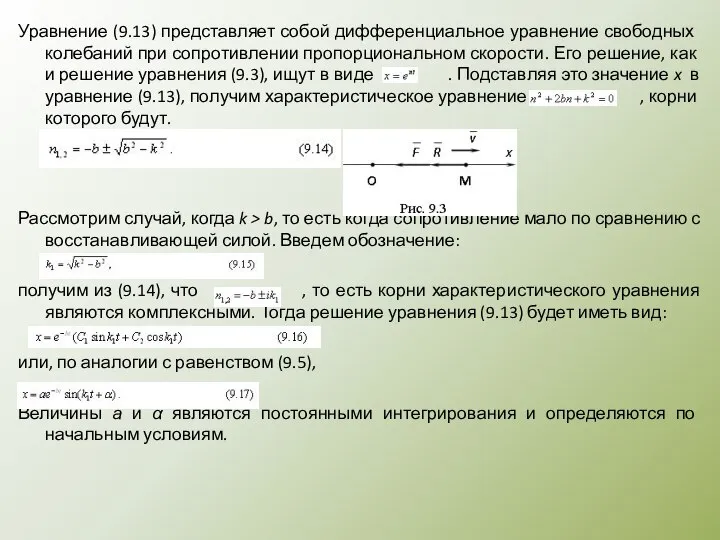
- 80. Затухающие колебания Пусть материальная точка М движется прямолинейно по оси x. На точку при ее движении
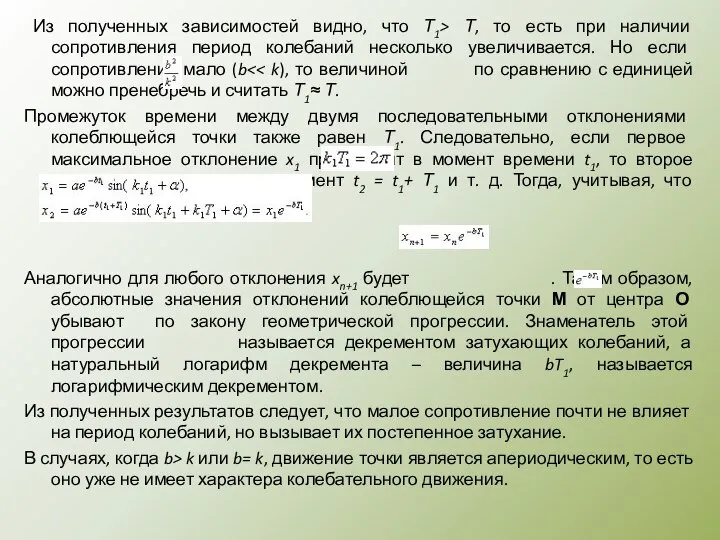
- 81. Уравнение (9.13) представляет собой дифференциальное уравнение свободных колебаний при сопротивлении пропорциональном скорости. Его решение, как и
- 82. Колебания, происходящие по закону (9.17), называют затухающими, так как благодаря наличию множителя е-bt величина x =
- 83. Из полученных зависимостей видно, что Т1> Т, то есть при наличии сопротивления период колебаний несколько увеличивается.
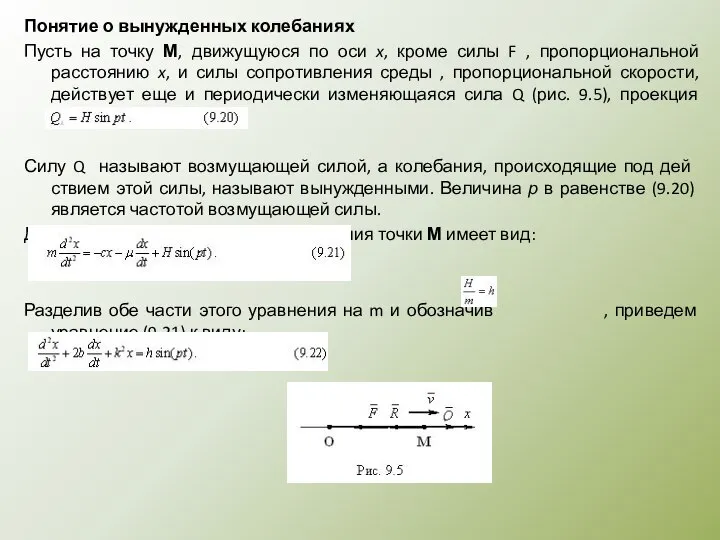
- 84. Понятие о вынужденных колебаниях Пусть на точку М, движущуюся по оси x, кроме силы F ,
- 85. Это есть линейное дифференциальное уравнение второго порядка с постоянными коэффициентами и с правой частью отличной от
- 87. Скачать презентацию
Содержание
Лекция 1 - Основные понятия и определения теоретической механики
Содержание
Лекция 1 - Основные понятия и определения теоретической механики
Лекция 1
Теоретическая механика - это наука о наиболее общих законах механического
Лекция 1
Теоретическая механика - это наука о наиболее общих законах механического
2 Любое тело под действием приложенных к нему сил изменяет
2 Любое тело под действием приложенных к нему сил изменяет

6 Если к некоторому телу приложена система сил и
6 Если к некоторому телу приложена система сил и

Рис. 1.2 Рис. 1.3
Аксиома 3. Две силы, приложенные
Рис. 1.2 Рис. 1.3
Аксиома 3. Две силы, приложенные

Следствия из аксиом
Следствие 1. Силу, приложенную к абсолютно твердому
Следствия из аксиом
Следствие 1. Силу, приложенную к абсолютно твердому
Следствие 2. Теорема о необходимом условии равновесия тела, находящимся под
Следствие 2. Теорема о необходимом условии равновесия тела, находящимся под
Лекция 2
Виды связей и их реакции
При решении технических задач возникает необходимость
Лекция 2
Виды связей и их реакции
При решении технических задач возникает необходимость

4 Цилиндрический шарнир (рис. 2.4) и подшипник (опора В
4 Цилиндрический шарнир (рис. 2.4) и подшипник (опора В

6 Шарнирно-подвижная опора. Этот вид связи конструктивно выполняется в
6 Шарнирно-подвижная опора. Этот вид связи конструктивно выполняется в
Плоская система сходящихся сил
Системой сходящихся сил называется система сил, линии,
Плоская система сходящихся сил
Системой сходящихся сил называется система сил, линии,
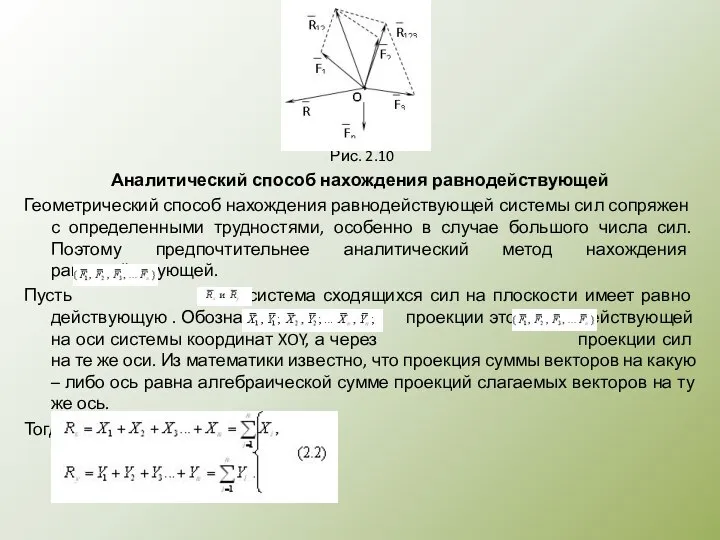
Рис. 2.10
Аналитический способ нахождения равнодействующей
Геометрический способ нахождения равнодействующей системы
Рис. 2.10
Аналитический способ нахождения равнодействующей
Геометрический способ нахождения равнодействующей системы

Модуль равнодействующей равен:
Направляющие косинусы вектора R можно найти по
Модуль равнодействующей равен:
Направляющие косинусы вектора R можно найти по
В аналитической форме: Для равновесия свободного твердого тела, находящегося под
В аналитической форме: Для равновесия свободного твердого тела, находящегося под
Лекция 3
Момент силы относительно точки
Рассмотрим силу F и точку О,
Лекция 3
Момент силы относительно точки
Рассмотрим силу F и точку О,
Момент силы относительно оси
Вращательный эффект действия силы на тело
Момент силы относительно оси
Вращательный эффект действия силы на тело
Пара сил. Момент пары сил на плоскости
Парой сил называется система
Пара сил. Момент пары сил на плоскости
Парой сил называется система
Момент пары считается положительным, когда пара стремится повернуть тело против
Момент пары считается положительным, когда пара стремится повернуть тело против

Перенесем силы по линиям действия в точки А и В
Перенесем силы по линиям действия в точки А и В

Теорема о сложении пар сил. Пары сил, лежащие в одной
Теорема о сложении пар сил. Пары сил, лежащие в одной

Рис. 3.5
Равновесие рычага
Рычагом называется твердое тело, вращающееся вокруг неподвижной оси
Рис. 3.5
Равновесие рычага
Рычагом называется твердое тело, вращающееся вокруг неподвижной оси

Рис. 3.6 Рис. 3.7
Сложим все силы, направленные вверх: ,
и
Рис. 3.6 Рис. 3.7
Сложим все силы, направленные вверх: ,
и

В итоге возможны три случая:
1) , тогда система сводится к
В итоге возможны три случая:
1) , тогда система сводится к
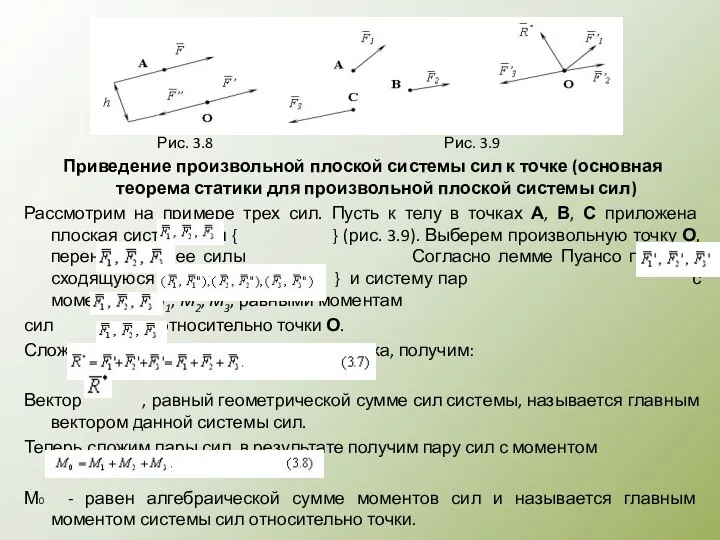
Рис. 3.8 Рис. 3.9
Приведение произвольной плоской системы сил к
Рис. 3.8 Рис. 3.9
Приведение произвольной плоской системы сил к
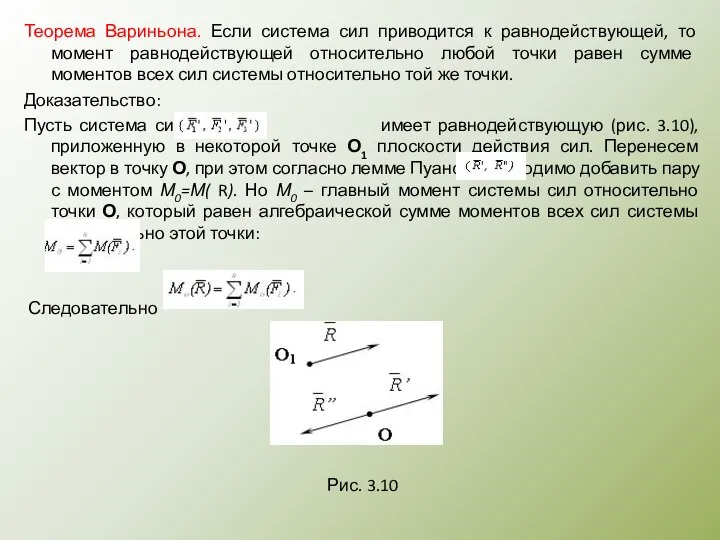
Теорема Вариньона. Если система сил приводится к равнодействующей, то момент
Теорема Вариньона. Если система сил приводится к равнодействующей, то момент
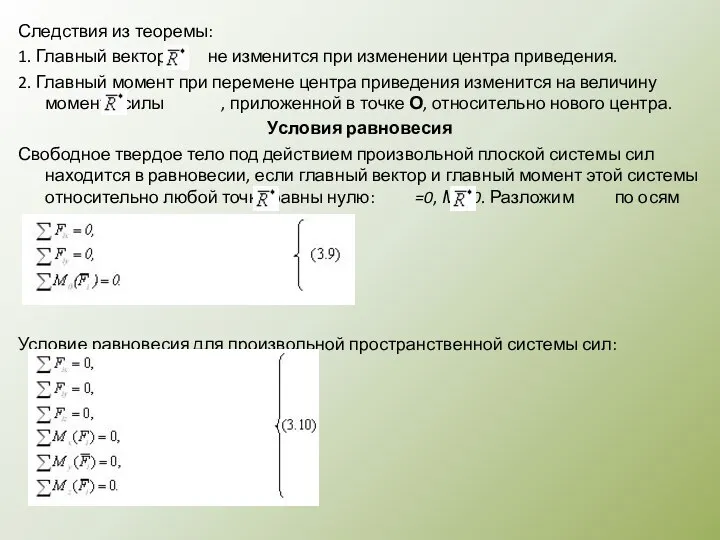
Следствия из теоремы:
1. Главный вектор не изменится при изменении центра
Следствия из теоремы:
1. Главный вектор не изменится при изменении центра

Лекция 4
Кинематика
В кинематике изучается движение материальных тел в пространстве с
Лекция 4
Кинематика
В кинематике изучается движение материальных тел в пространстве с
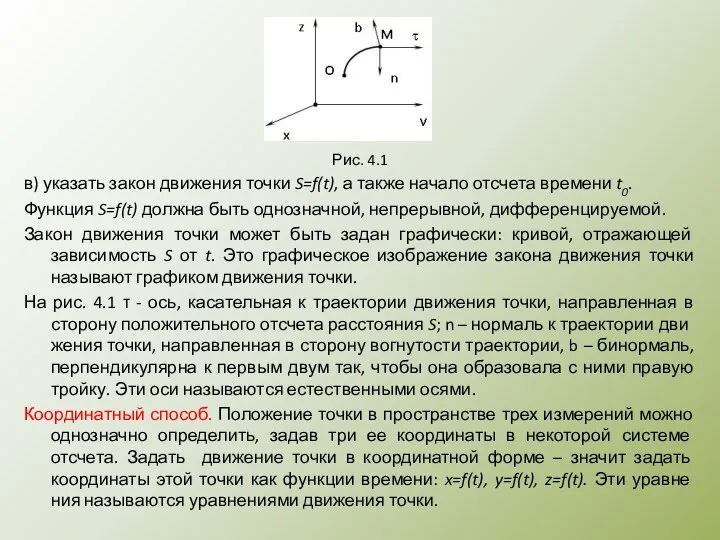
Рис. 4.1
в) указать закон движения точки S=f(t), а также начало
Рис. 4.1
в) указать закон движения точки S=f(t), а также начало
Скорость точки
Пусть движение точки задано естественным способом, и пусть в
Скорость точки
Пусть движение точки задано естественным способом, и пусть в
Если движение точки задано координатным способом, и движущаяся точка в
Если движение точки задано координатным способом, и движущаяся точка в

Вектор Δν называется вектором приращения скорости. Вектор равен отношению приращения
Вектор Δν называется вектором приращения скорости. Вектор равен отношению приращения

Вычислим первый предел. Для этого введем на касательной к траектории
Вычислим первый предел. Для этого введем на касательной к траектории

Модуль и направляющие косинусы полного ускорения найдутся по формулам:
где α
Модуль и направляющие косинусы полного ускорения найдутся по формулам:
где α
Лекция 5
Виды движения точки в зависимости от ускорения
Прямолинейное движение. В
Лекция 5
Виды движения точки в зависимости от ускорения
Прямолинейное движение. В
Кинематика движения твердого тела
При произвольном движении твердого тела отдельные его
Кинематика движения твердого тела
При произвольном движении твердого тела отдельные его

Рис. 5.1
Обозначим через А1, В1 и А2, В2 положения, которые занимают
Рис. 5.1
Обозначим через А1, В1 и А2, В2 положения, которые занимают
Так как равенство (5.1) имеет место в любой момент времени,
Так как равенство (5.1) имеет место в любой момент времени,
Уравнение
носит название закона вращательного движения тела. Функция (5.3)
Уравнение
носит название закона вращательного движения тела. Функция (5.3)
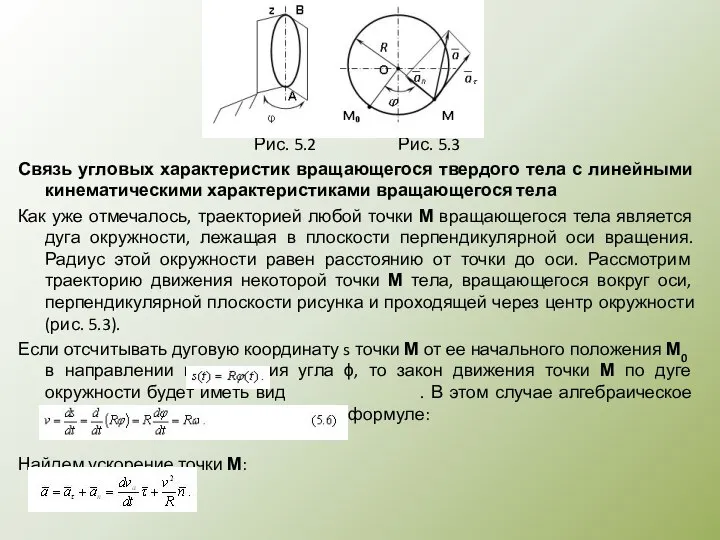
Рис. 5.2 Рис. 5.3
Связь угловых характеристик вращающегося твердого тела с линейными
Рис. 5.2 Рис. 5.3
Связь угловых характеристик вращающегося твердого тела с линейными

Продифференцировав (5.6) по времени, определим алгебраическую величину касательного ускорения:
Нормальное ускорение
Продифференцировав (5.6) по времени, определим алгебраическую величину касательного ускорения:
Нормальное ускорение

На рис. 5.4 изображены две системы координат: неподвижная Oxyz и
На рис. 5.4 изображены две системы координат: неподвижная Oxyz и

Теорема о скорости точки в сложном движении.
Вектор абсолютной скорости точки
Теорема о скорости точки в сложном движении.
Вектор абсолютной скорости точки
Вектор изображает абсолютное перемещение точки, вектор относительное перемещение, вектор переносное
Вектор изображает абсолютное перемещение точки, вектор относительное перемещение, вектор переносное

Понятие о плоскопараллельном движении твердого тела
Движение твердого тела называется плоскопараллельным,
Понятие о плоскопараллельном движении твердого тела
Движение твердого тела называется плоскопараллельным,
Теорема о возможности представления плоскопараллельного движения в виде совокупности двух
Теорема о возможности представления плоскопараллельного движения в виде совокупности двух

Скорость точки плоской фигуры
Теорема. Скорость любой точки В плоской фигуры
Скорость точки плоской фигуры
Теорема. Скорость любой точки В плоской фигуры

На основании теоремы о скорости точки в сложном движении имеем
На основании теоремы о скорости точки в сложном движении имеем
Если А и В - произвольные точки тела, Р -
Если А и В - произвольные точки тела, Р -
Лекция 6
Динамика
Динамика – раздел теоретической механики, изучающий движение материальных
Лекция 6
Динамика
Динамика – раздел теоретической механики, изучающий движение материальных

Таким образом, причиной возникновения движения является сила.
Закон равенства действия и
Таким образом, причиной возникновения движения является сила.
Закон равенства действия и
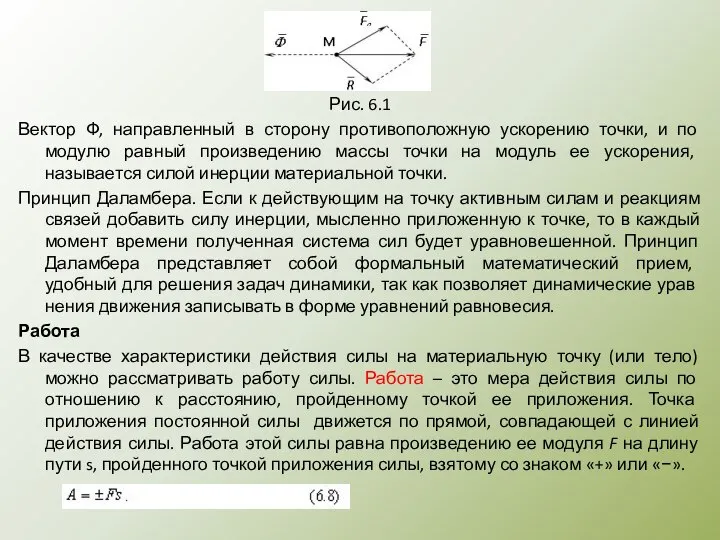
Рис. 6.1
Вектор Ф, направленный в сторону противоположную ускорению точки, и
Рис. 6.1
Вектор Ф, направленный в сторону противоположную ускорению точки, и

Знак «+» берется в случае, когда направления силы и перемещения
Знак «+» берется в случае, когда направления силы и перемещения

Работа силы на криволинейном участке
Рассмотрим общий случай нахождения работы
Работа силы на криволинейном участке
Рассмотрим общий случай нахождения работы
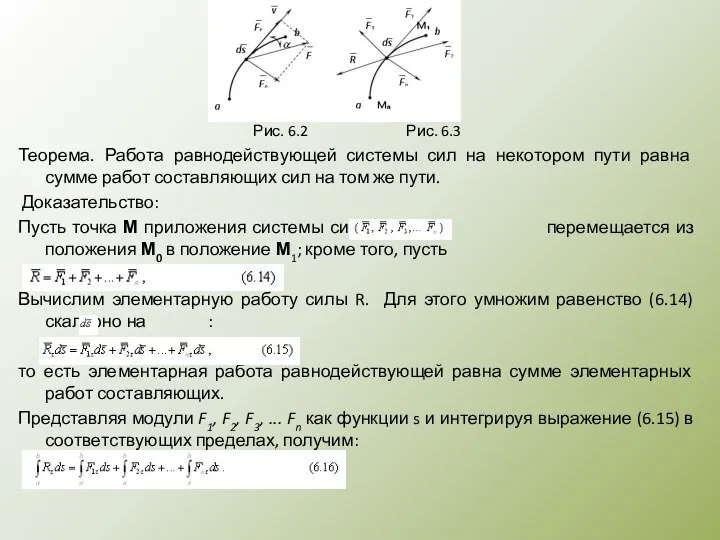
Рис. 6.2 Рис. 6.3
Теорема. Работа равнодействующей системы сил на некотором
Рис. 6.2 Рис. 6.3
Теорема. Работа равнодействующей системы сил на некотором
Поскольку окончательно имеем:
что и требовалось доказать.
Поскольку окончательно имеем:
что и требовалось доказать.
Лекция 7
Мощность
Две различные силы могут совершать одну и ту же
Лекция 7
Мощность
Две различные силы могут совершать одну и ту же
Отношение полезной мощности (работы) ко всей потребляемой мощности (работе)
Отношение полезной мощности (работы) ко всей потребляемой мощности (работе)
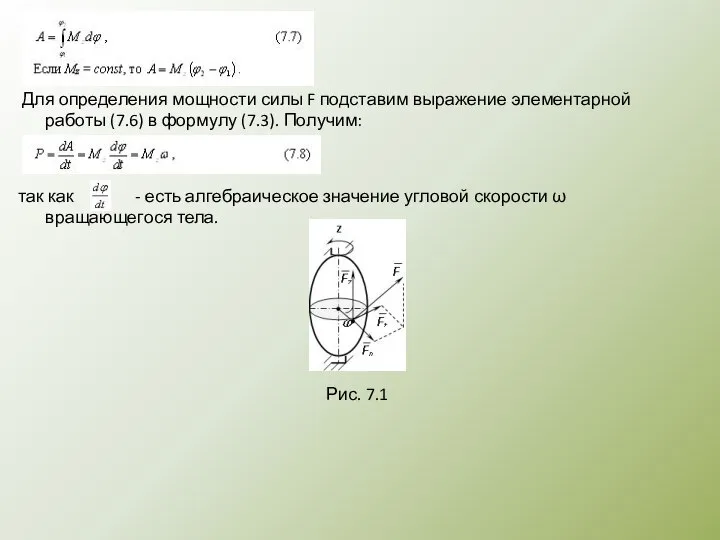
Для определения мощности силы F подставим выражение элементарной работы
Для определения мощности силы F подставим выражение элементарной работы

Понятие о трении. Трение скольжения
Сопротивление, возникающее при скольжении одного тела
Понятие о трении. Трение скольжения
Сопротивление, возникающее при скольжении одного тела

Исследованием явления трения занимался еще Леонардо да Винчи. Ввиду значения,
Исследованием явления трения занимался еще Леонардо да Винчи. Ввиду значения,

Сила трения скольжения в движении пропорциональна нормальному давлению одного тела
Сила трения скольжения в движении пропорциональна нормальному давлению одного тела
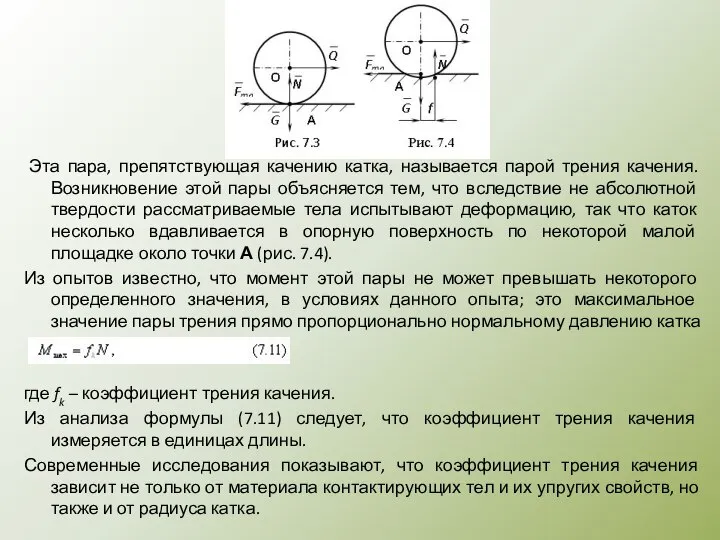
Эта пара, препятствующая качению катка, называется парой трения качения.
Эта пара, препятствующая качению катка, называется парой трения качения.
Теоремы динамики точки
Теорема об изменении количества движения. Количеством движения
Теоремы динамики точки
Теорема об изменении количества движения. Количеством движения

Произведение силы F на малое приращение времени dt, в течение
Произведение силы F на малое приращение времени dt, в течение

Лекция 8
Кинетическая энергия
Кроме количества движения основной мерой механического движения является
Лекция 8
Кинетическая энергия
Кроме количества движения основной мерой механического движения является
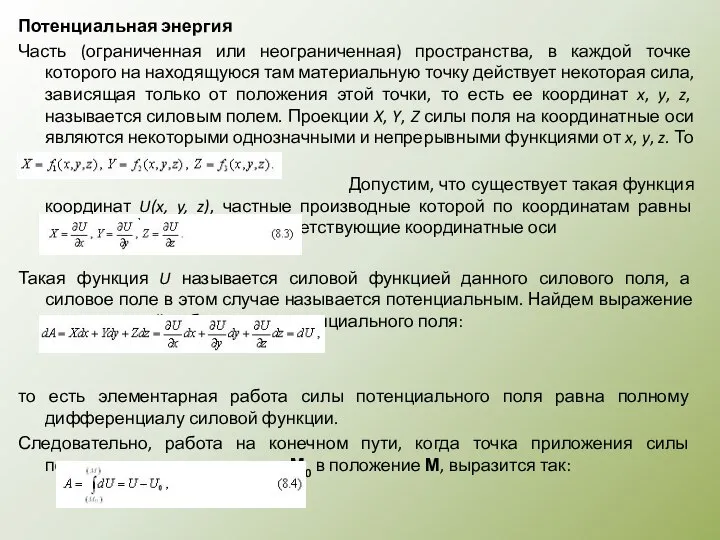
Потенциальная энергия
Часть (ограниченная или неограниченная) пространства, в каждой точке которого
Потенциальная энергия
Часть (ограниченная или неограниченная) пространства, в каждой точке которого
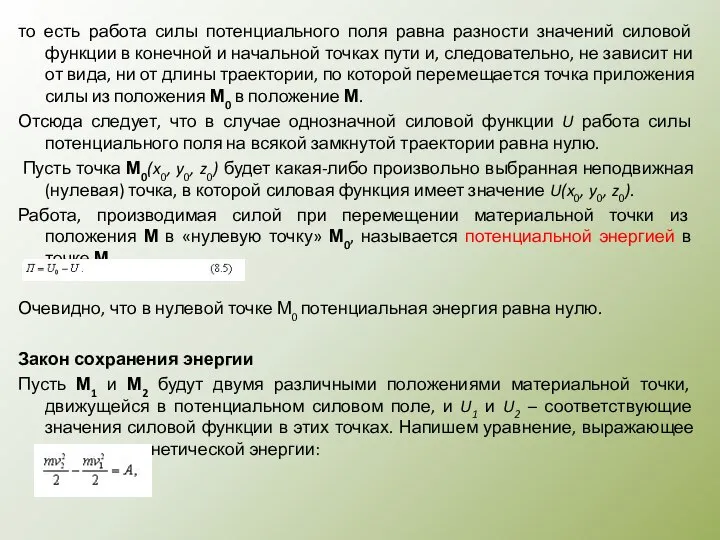
то есть работа силы потенциального поля равна разности значений силовой
то есть работа силы потенциального поля равна разности значений силовой

где v1 и v2 – скорости движущейся точки в положениях
где v1 и v2 – скорости движущейся точки в положениях
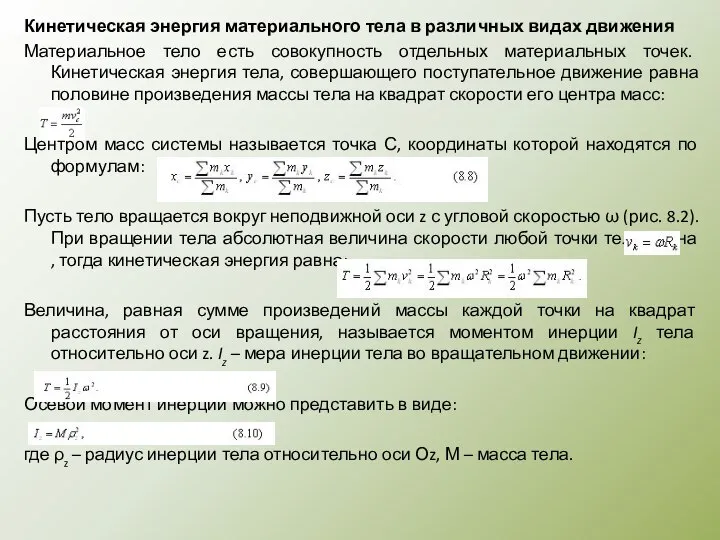
Кинетическая энергия материального тела в различных видах движения
Материальное тело есть
Кинетическая энергия материального тела в различных видах движения
Материальное тело есть
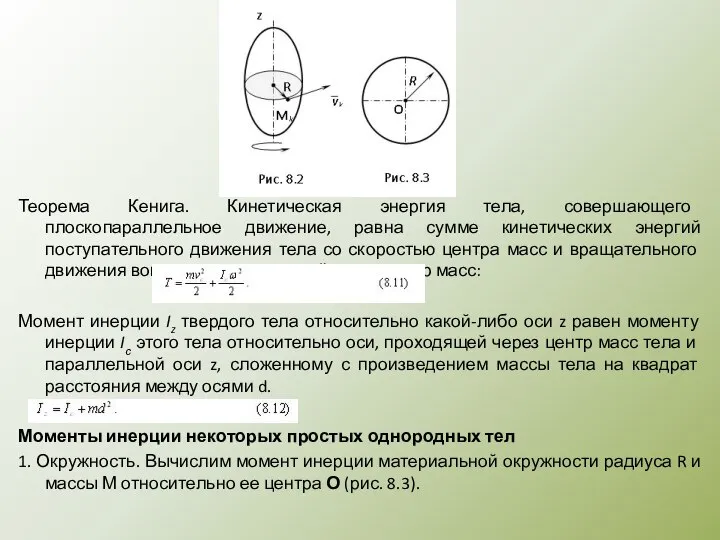
Теорема Кенига. Кинетическая энергия тела, совершающего плоскопараллельное движение, равна сумме
Теорема Кенига. Кинетическая энергия тела, совершающего плоскопараллельное движение, равна сумме
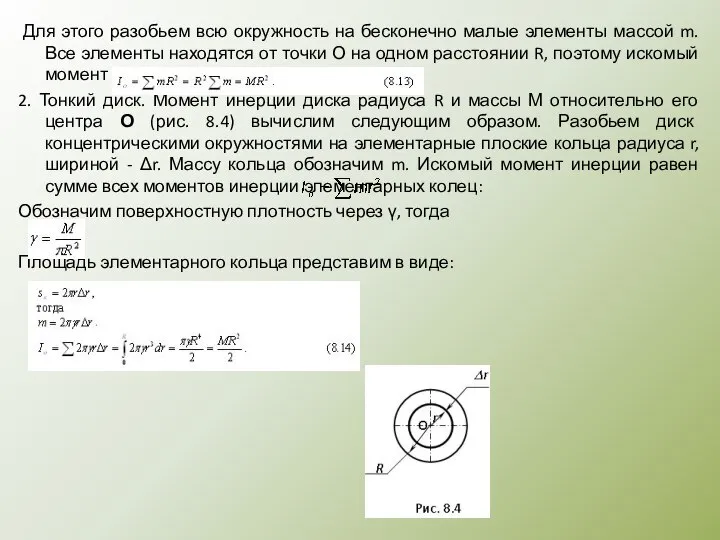
Для этого разобьем всю окружность на бесконечно малые элементы
Для этого разобьем всю окружность на бесконечно малые элементы

3. Круглый цилиндр радиуса R, массой М. Разобьем весь
3. Круглый цилиндр радиуса R, массой М. Разобьем весь

Объем сферы равен:
масса сферы:
тогда момент инерции шара равен:
Подставляя значение
Объем сферы равен:
масса сферы:
тогда момент инерции шара равен:
Подставляя значение

По аналогии можно записать дифференциальное уравнение вращательного движения тела в
По аналогии можно записать дифференциальное уравнение вращательного движения тела в
Лекция 9
Колебательное движение материальной точки
Свободные колебания без учета сил
Лекция 9
Колебательное движение материальной точки
Свободные колебания без учета сил
Уравнение (9.3) представляет собой дифференциальное уравнение свободных колебаний при
Уравнение (9.3) представляет собой дифференциальное уравнение свободных колебаний при
Промежуток времени Т, в течение которого точка совершает одно полное
Промежуток времени Т, в течение которого точка совершает одно полное
Итак, свободные колебания при отсутствии сопротивления обладают следующими свойствами:
1 амплитуда
Итак, свободные колебания при отсутствии сопротивления обладают следующими свойствами:
1 амплитуда
Затухающие колебания
Пусть материальная точка М движется прямолинейно по оси x.
Затухающие колебания
Пусть материальная точка М движется прямолинейно по оси x.
Уравнение (9.13) представляет собой дифференциальное уравнение свободных колебаний при сопротивлении
Уравнение (9.13) представляет собой дифференциальное уравнение свободных колебаний при сопротивлении

Колебания, происходящие по закону (9.17), называют затухающими, так как благодаря
Колебания, происходящие по закону (9.17), называют затухающими, так как благодаря
Из полученных зависимостей видно, что Т1> Т, то есть
Из полученных зависимостей видно, что Т1> Т, то есть
Понятие о вынужденных колебаниях
Пусть на точку М, движущуюся по оси
Понятие о вынужденных колебаниях
Пусть на точку М, движущуюся по оси

Это есть линейное дифференциальное уравнение второго порядка с постоянными коэффициентами
Это есть линейное дифференциальное уравнение второго порядка с постоянными коэффициентами
 Постоянный электрический ток. Причины электрического тока
Постоянный электрический ток. Причины электрического тока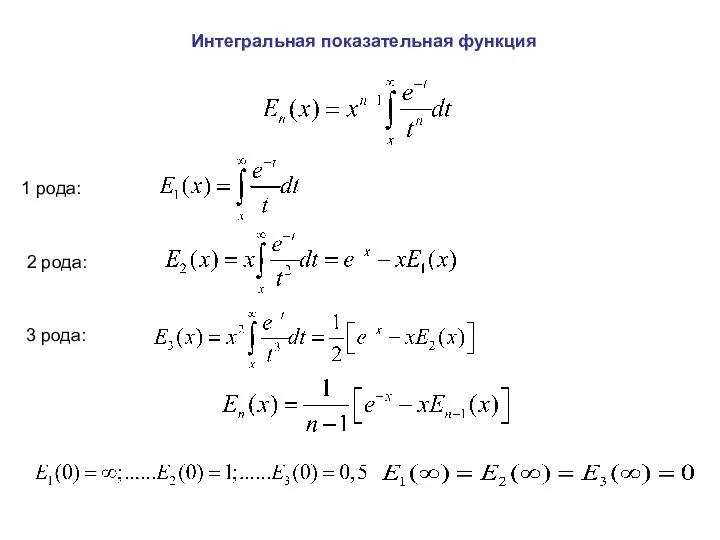 Излучение источников. Интегральная показательная функция. (Лекция 5)
Излучение источников. Интегральная показательная функция. (Лекция 5) Газовая хроматография
Газовая хроматография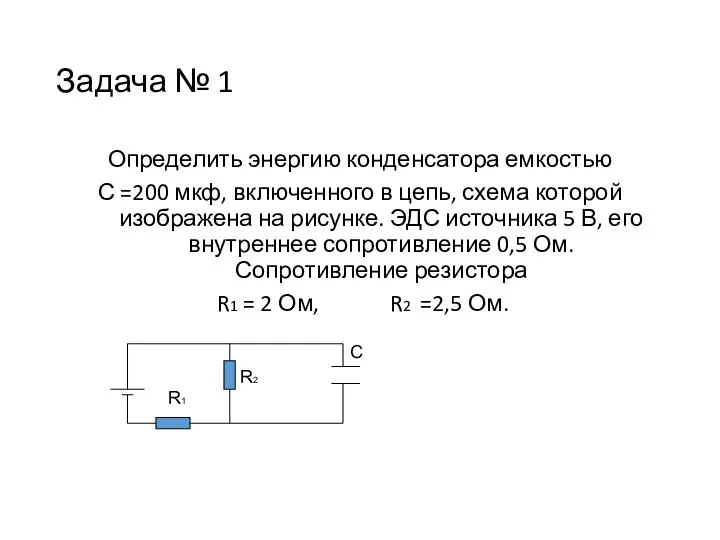 Конденсаторы в цепи постоянного тока
Конденсаторы в цепи постоянного тока Квантовая радиофизика
Квантовая радиофизика Презентация по физике "Компьютерные технологии в процессе обучения физики" - скачать
Презентация по физике "Компьютерные технологии в процессе обучения физики" - скачать  «Момент силы»
«Момент силы»  Определение фокусного расстояния рассеивающей линзы
Определение фокусного расстояния рассеивающей линзы Электротехника и электроника
Электротехника и электроника Презентация по физике "Видимое излучение" - скачать
Презентация по физике "Видимое излучение" - скачать  Роботизированные машины для выполнения интеллектуальных технологий в растениеводстве
Роботизированные машины для выполнения интеллектуальных технологий в растениеводстве Презентация по физике "Силы всякие нужны. Силы всякие важны" - скачать
Презентация по физике "Силы всякие нужны. Силы всякие важны" - скачать  Механическая картина мира (МКМ). Механика и методология Ньютона
Механическая картина мира (МКМ). Механика и методология Ньютона Презентация по физике "«Конденсаторы»" - скачать
Презентация по физике "«Конденсаторы»" - скачать  Ньютон и Гук В.Е. Фрадкин, 2006-8
Ньютон и Гук В.Е. Фрадкин, 2006-8 Закони електричного подразнення
Закони електричного подразнення Презентация ультразвук
Презентация ультразвук  Относительность движения
Относительность движения Фотонные кристаллы и методы их синтеза
Фотонные кристаллы и методы их синтеза Изображение. Структура оптического изображения
Изображение. Структура оптического изображения Аттестационная работа. Использование метода проектов в преподавании физики в образовательном учреждении
Аттестационная работа. Использование метода проектов в преподавании физики в образовательном учреждении Нобель сыйлығының иегері Николай Николаевич Семенов
Нобель сыйлығының иегері Николай Николаевич Семенов Умники и умницы
Умники и умницы Спектральдік және басқа да оптикалық әдістер
Спектральдік және басқа да оптикалық әдістер Лекция 7. Свободные затухающие колебания
Лекция 7. Свободные затухающие колебания Коливальний рух у природі і техніці
Коливальний рух у природі і техніці Основные понятия сопромата
Основные понятия сопромата Линзы. Ход лучей в линзе (11 класс)
Линзы. Ход лучей в линзе (11 класс)