- Полигармонические колебания

Содержание
- 2. Другие характеристики колебательных процессов Пиковое значение и размах. Осредненные характеристики среднее значение и СКЗ:
- 3. Колебания системы с одной степенью свободы При изучении колебаний различных механических систем необходимо в зависимости от
- 4. Колебания системы с одной степенью свободы
- 5. АЧХ и ФЧХ системы с одной степенью свободы
- 6. Колебания системы с малым демпфированием. Переходные процессы. Свободные fрез =3 Гц вынужденные f=0.5 Гц вынужденные f=2
- 7. Колебания системы с двумя степенями свободы
- 8. АЧХ системы с двумя степенями свободы
- 9. Колебания системы с одной степенью свободы
- 10. Идеология
- 11. Виброметрия
- 12. Чем, где, как и что мерить Частотный диапазон: НЧ - 0 - 200 Гц СЧ -
- 13. 1 3 2 7 6 5 4 АКСЕЛЕРОМЕТРЫ Частотный диапазон Способы установки датчиков Низкие частоты (0
- 14. ВЕЛОМЕТРЫ. Частотный диапазон 1 2 3 5 6 4 Резонансная частота датчика Частотный диапазон Границы частотного
- 15. Частотный диапазон Границы частотного диапазона f, Гц S ПРОКСИМЕТРЫ 2 1 С В А 3 4
- 16. Периодический мониторинг I уровня I уровень периодический мониторинг вибрационного состояния роторного оборудования в стандартных полосах частот;
- 17. Периодический мониторинг II уровень контроль вибрации в полосах, тренд-анализ; прогнозирование ресурса работы оборудования, выявление причин повышенной
- 18. Уравновешивание в собственных опорах Нулевой пуск: А0 В0 Первый пробный пуск: A1 В1 Второй пробный пуск:
- 19. Одноплоскостная и двухплоскостная балансировка роторов Одноплоскостная балансировка Двухплоскостная балансировка C B А I I I А
- 20. Определение коэффициента влияния при одноплоскостной балансировке ротора
- 21. Определение места установки и величины корректирующей массы при одноплоскостной балансировке ротора
- 22. Неуравновешенность ротора Вызываемые неуравновешенностью вибрации имеют частоту, равную частоте вращения ротора.
- 23. Некоторые дефекты механической обработки Нагрев и воздействие центробежной силы приводят к радиальному смещению деталей, насажанных с
- 24. Анизотропия жесткости ротора Часто появление второй гармоники может быть вызвано анизотропией жесткости ротора. При вращении происходит
- 25. Расцентровка, жесткая муфта Дефектная муфта (а, б, в, г) а: моментная неуравновешенность в: статическая неуравновешенность ж:
- 26. Расцентровка, подвижная муфта Размах виброперемещения возрастает пропорционально передаваемой мощности
- 27. Подшипники скольжения Средний зазор: Относительный зазор: Где: относительный эксцентриситет χ = e/δ ; e=OO2 ; α
- 28. Подшипники качения Частота дефекта сепаратора: Частота дефекта нар. кольца: Частота дефекта внут. кольца: Дефект тел качения:
- 29. Метод огибающей
- 30. Развитие дефекта подшипника качения во времени Хороший Редкий дефект Развитый дефект Сильный дефект
- 31. Плохое крепление машины на фундаменте
- 32. Неравномерные воздушные зазоры О1 - ось цилиндрической расточки; О2 - ось симметрии поверхности полюсов О -
- 33. Магнитная несимметрия при равномерных воздушных зазорах
- 34. Зубчатые передачи
- 35. Сдвиг фазы и фазовая поправка
- 36. Пример расчета допустимой остаточной неуравновешенности Масса ротора W=100 кг; класс точности балансировки G=2,5; max частота вращения
- 37. Нормы на уравновешивание роторов G16 - приводы специального назначения, детали двигателей, коленчатые валы, части сельско- хозяйственных
- 38. Нормы вибрации Класс I: Отдельные узлы двигателей и агрегатов, полностью соединительные с основной машиной в рабочих
- 39. Типы опор балансировочных станков Наша схема: Классическая схема:
- 40. Собственные частоты и формы колебаний системы ротор-опоры I, II - ротор остается жестким, III, IV -
- 41. Отличительные особенности станков Отличительные особенности станка ВМ 3000: отсутствие затрат на монтаж (устанавливается на обычный цеховой
- 42. Особенности роликого блока Станки серии ВМ Станки серии ВМ, благодаря оригинальной конструкции роликового блока полностью исключают
- 44. Скачать презентацию
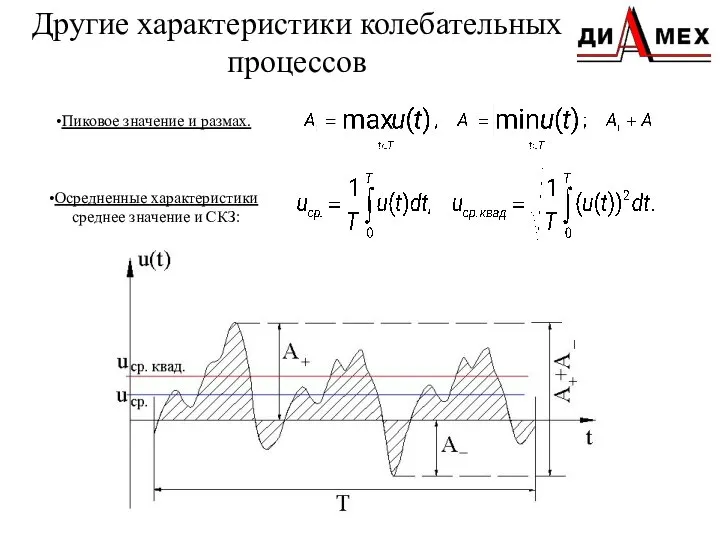
Другие характеристики колебательных процессов
Пиковое значение и размах.
Осредненные характеристики
среднее значение и
Другие характеристики колебательных процессов
Пиковое значение и размах.
Осредненные характеристики
среднее значение и
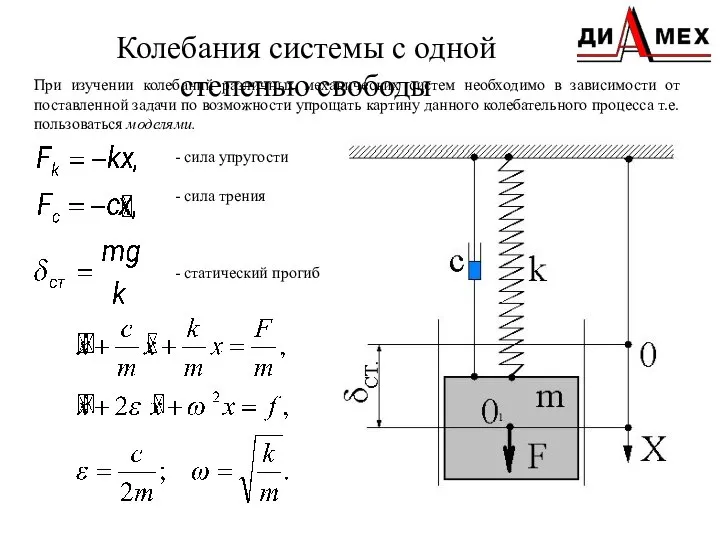
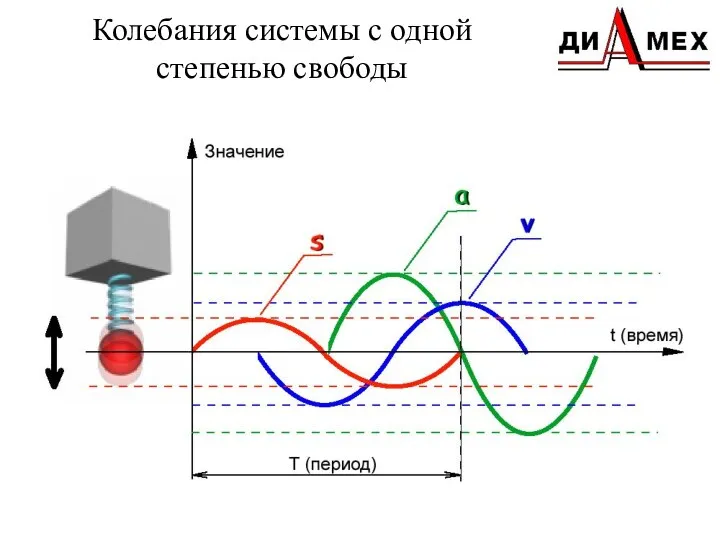
Колебания системы с одной степенью свободы
При изучении колебаний различных механических систем
Колебания системы с одной степенью свободы
При изучении колебаний различных механических систем
Колебания системы с одной степенью свободы
Колебания системы с одной степенью свободы
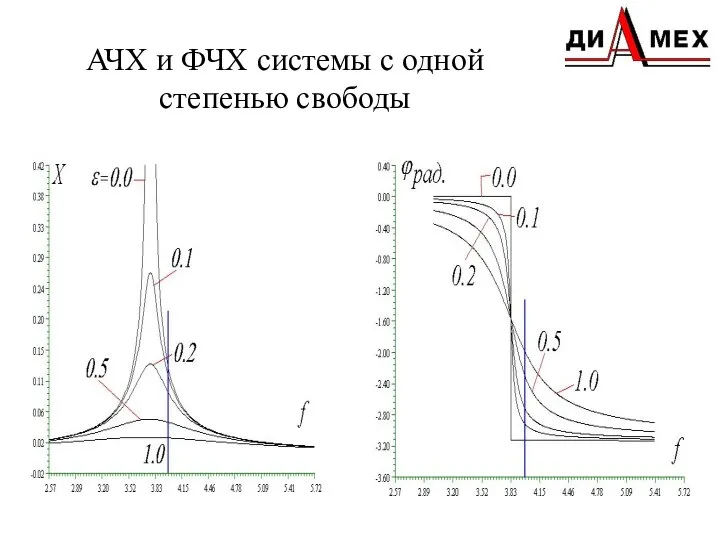
АЧХ и ФЧХ системы с одной степенью свободы
АЧХ и ФЧХ системы с одной степенью свободы
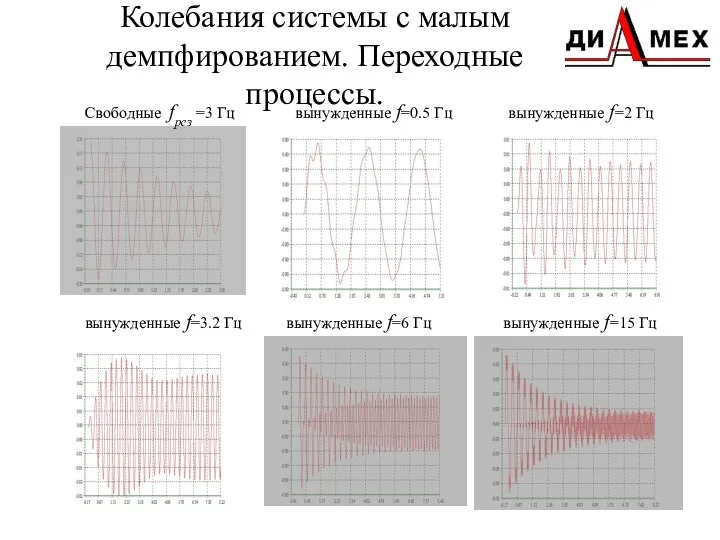
Колебания системы с малым демпфированием. Переходные процессы.
Свободные fрез =3 Гц вынужденные
Колебания системы с малым демпфированием. Переходные процессы.
Свободные fрез =3 Гц вынужденные
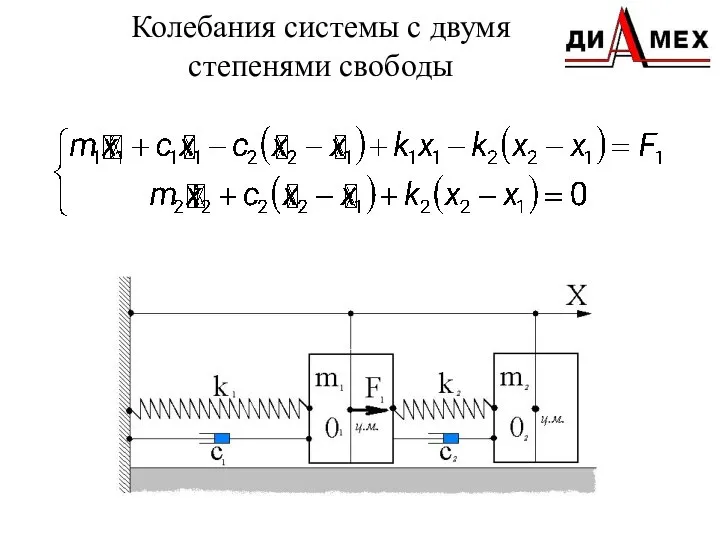
Колебания системы с двумя степенями свободы
Колебания системы с двумя степенями свободы
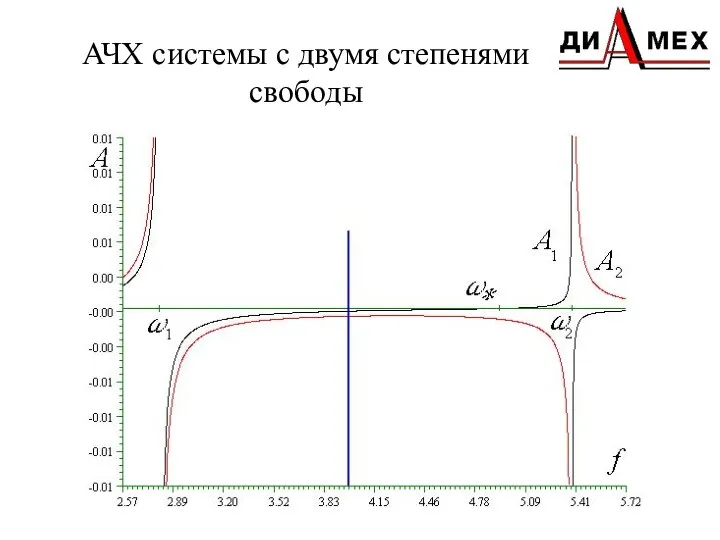
АЧХ системы с двумя степенями свободы
АЧХ системы с двумя степенями свободы
Колебания системы с одной
степенью свободы
Колебания системы с одной
степенью свободы
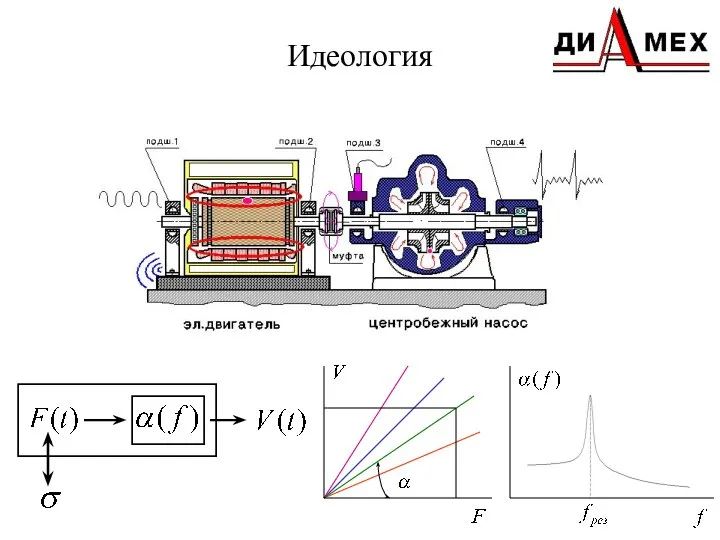
Идеология
Идеология
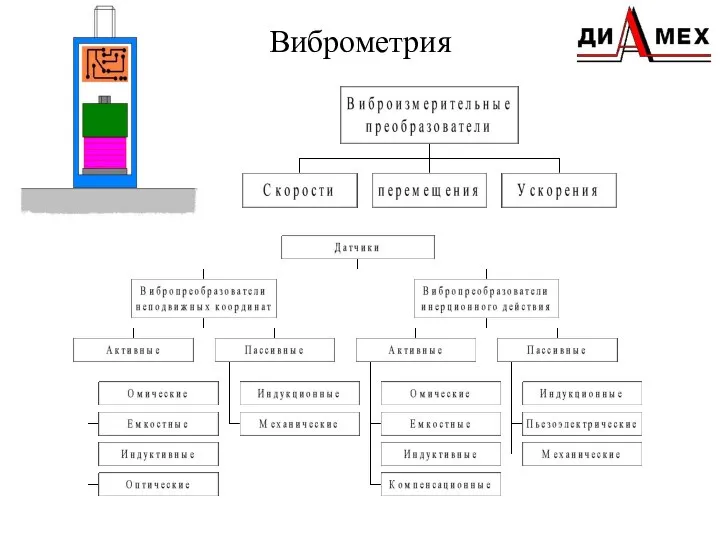
Виброметрия
Виброметрия
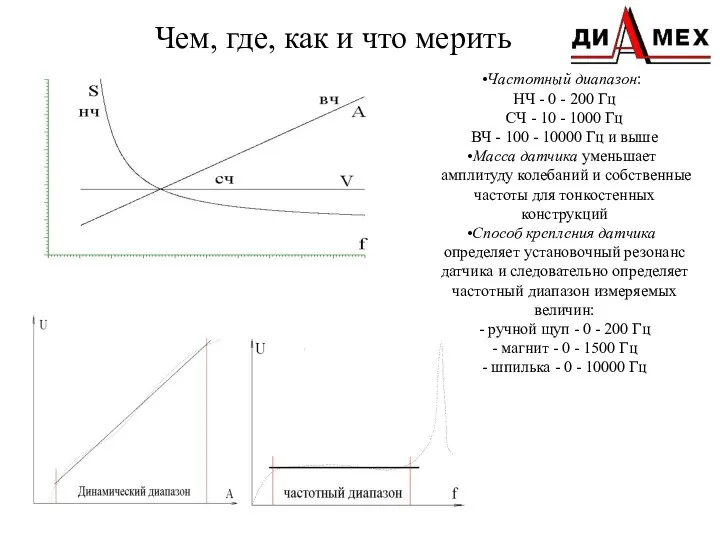
Чем, где, как и что мерить
Частотный диапазон:
НЧ - 0 -
Чем, где, как и что мерить
Частотный диапазон:
НЧ - 0 -
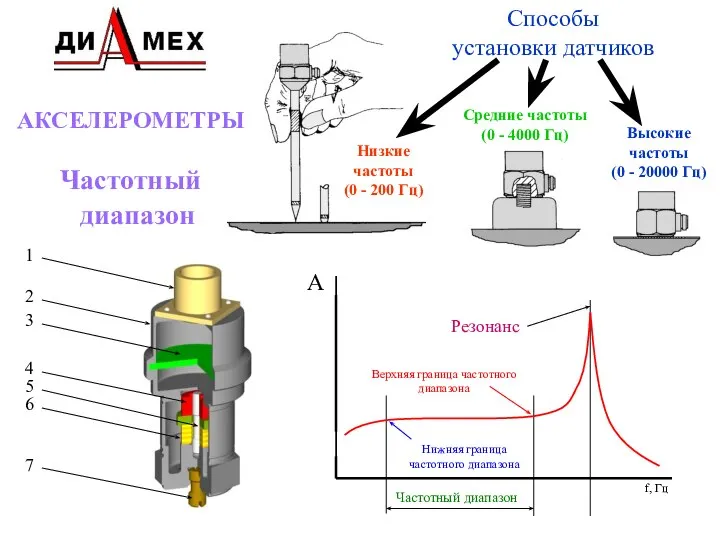
1
3
2
7
6
5
4
АКСЕЛЕРОМЕТРЫ
Частотный
диапазон
Способы
установки датчиков
Низкие
частоты
(0 - 200 Гц)
Средние частоты
(0 - 4000
1
3
2
7
6
5
4
АКСЕЛЕРОМЕТРЫ
Частотный
диапазон
Способы
установки датчиков
Низкие
частоты
(0 - 200 Гц)
Средние частоты
(0 - 4000
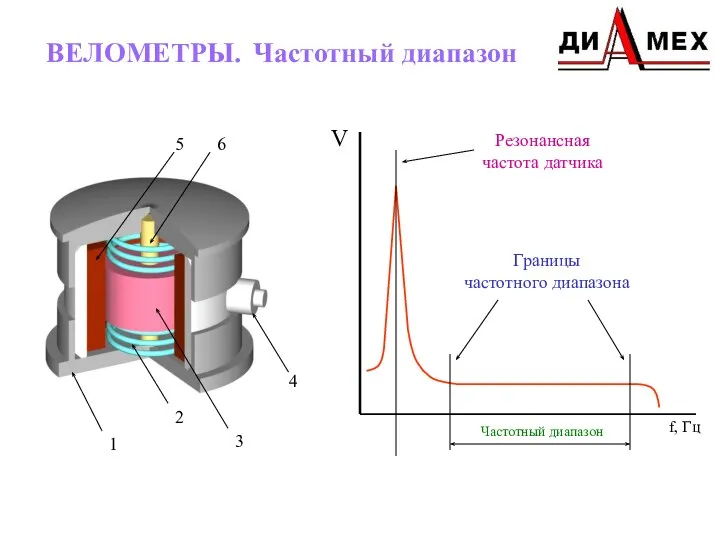
ВЕЛОМЕТРЫ. Частотный диапазон
1
2
3
5
6
4
Резонансная
частота датчика
Частотный диапазон
Границы
частотного диапазона
f, Гц
V
ВЕЛОМЕТРЫ. Частотный диапазон
1
2
3
5
6
4
Резонансная
частота датчика
Частотный диапазон
Границы
частотного диапазона
f, Гц
V
Частотный диапазон
Границы
частотного диапазона
f, Гц
S
ПРОКСИМЕТРЫ
2
1
С
В
А
3
4
Частотный диапазон
Границы
частотного диапазона
f, Гц
S
ПРОКСИМЕТРЫ
2
1
С
В
А
3
4
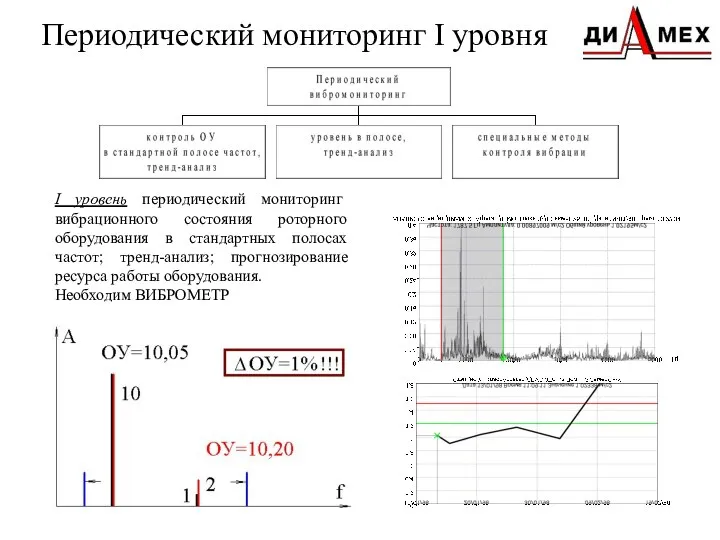
Периодический мониторинг I уровня
I уровень периодический мониторинг вибрационного состояния роторного оборудования
Периодический мониторинг I уровня
I уровень периодический мониторинг вибрационного состояния роторного оборудования
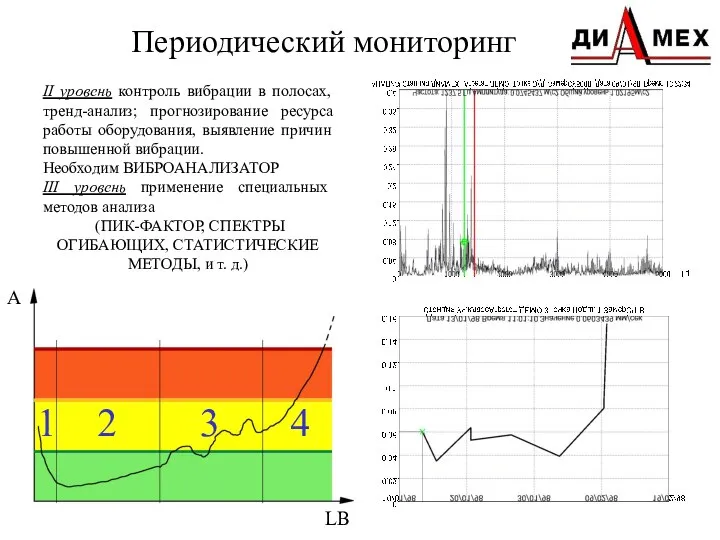
Периодический мониторинг
II уровень контроль вибрации в полосах, тренд-анализ; прогнозирование ресурса
Периодический мониторинг
II уровень контроль вибрации в полосах, тренд-анализ; прогнозирование ресурса
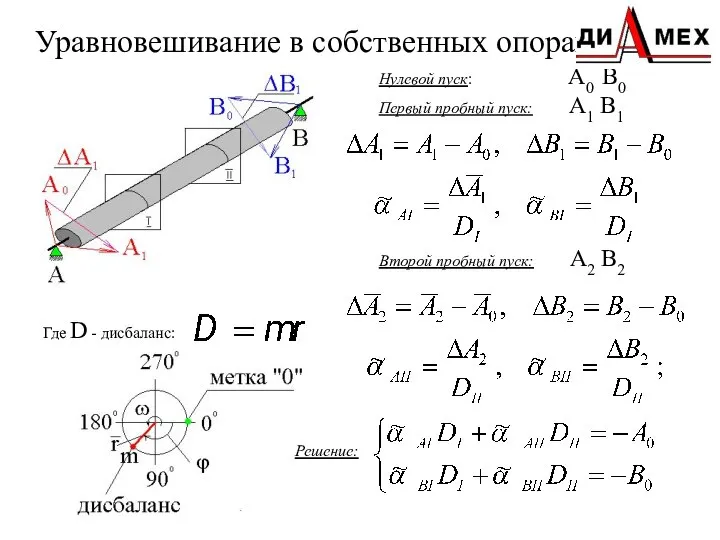
Уравновешивание в собственных опорах
Нулевой пуск: А0 В0
Первый пробный пуск: A1 В1
Второй
Уравновешивание в собственных опорах
Нулевой пуск: А0 В0
Первый пробный пуск: A1 В1
Второй
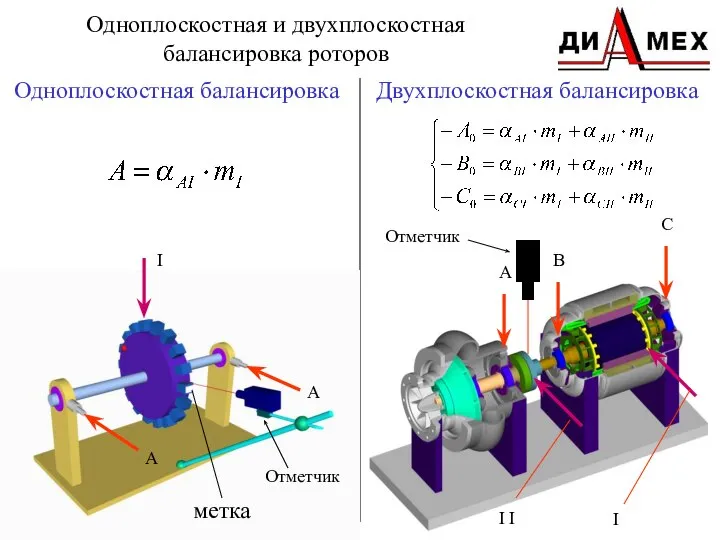
Одноплоскостная и двухплоскостная
балансировка роторов
Одноплоскостная балансировка
Двухплоскостная балансировка
C
B
А
I I
I
А
А
Отметчик
I
Отметчик
метка
Одноплоскостная и двухплоскостная
балансировка роторов
Одноплоскостная балансировка
Двухплоскостная балансировка
C
B
А
I I
I
А
А
Отметчик
I
Отметчик
метка
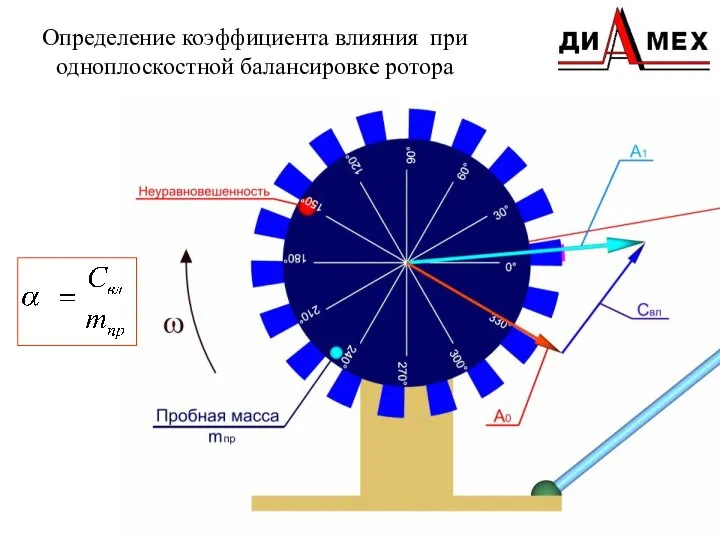
Определение коэффициента влияния при одноплоскостной балансировке ротора
Определение коэффициента влияния при одноплоскостной балансировке ротора
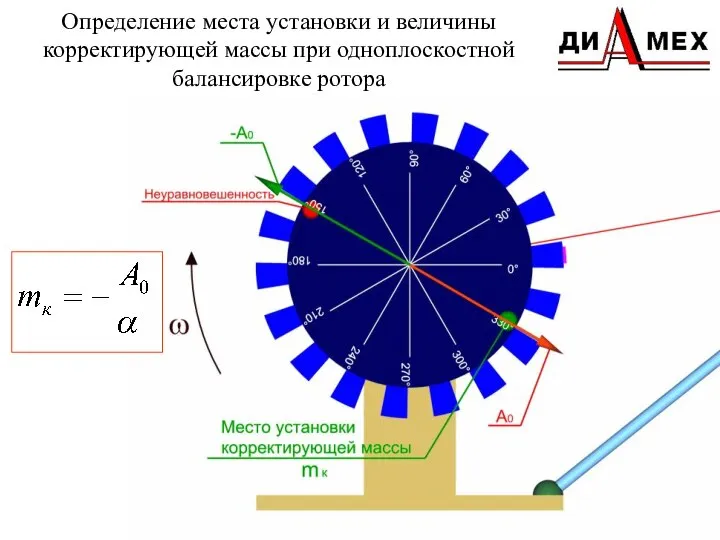
Определение места установки и величины корректирующей массы при одноплоскостной балансировке ротора
Определение места установки и величины корректирующей массы при одноплоскостной балансировке ротора

Неуравновешенность ротора
Вызываемые неуравновешенностью вибрации имеют частоту, равную частоте вращения ротора.
Неуравновешенность ротора
Вызываемые неуравновешенностью вибрации имеют частоту, равную частоте вращения ротора.
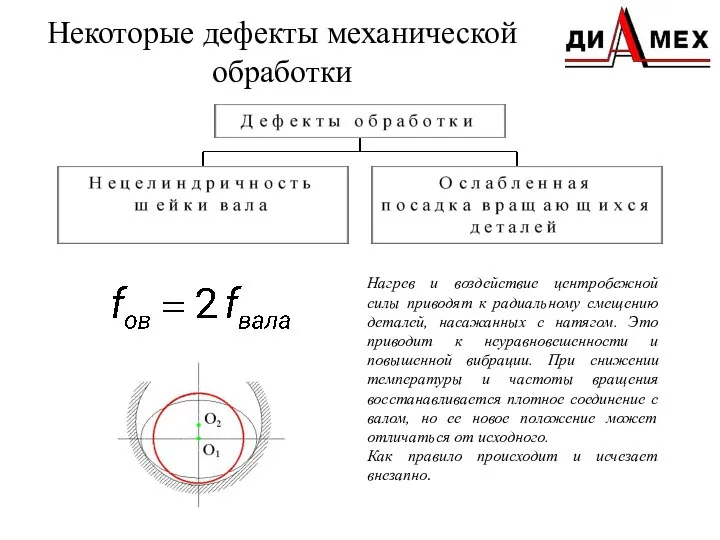
Некоторые дефекты механической обработки
Нагрев и воздействие центробежной силы приводят к радиальному
Некоторые дефекты механической обработки
Нагрев и воздействие центробежной силы приводят к радиальному
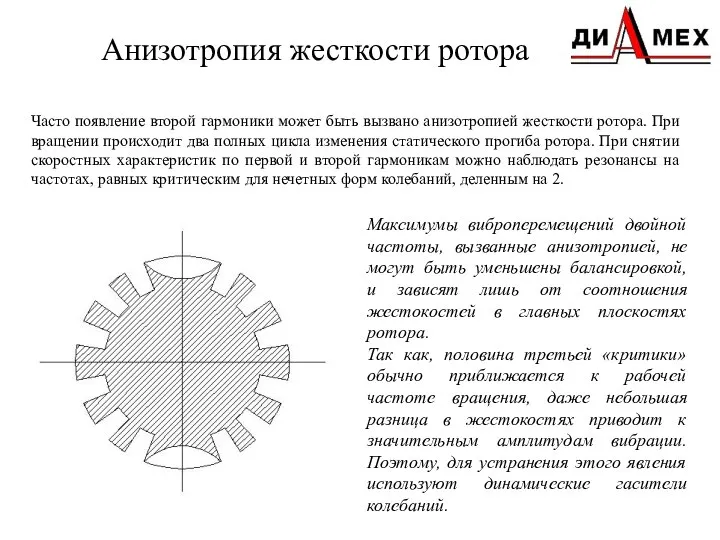
Анизотропия жесткости ротора
Часто появление второй гармоники может быть вызвано анизотропией
Анизотропия жесткости ротора
Часто появление второй гармоники может быть вызвано анизотропией

Расцентровка, жесткая муфта
Дефектная муфта (а, б, в, г)
а: моментная
неуравновешенность
в: статическая
неуравновешенность
ж: моментная
неуравновешенность
д:
Расцентровка, жесткая муфта
Дефектная муфта (а, б, в, г)
а: моментная
неуравновешенность
в: статическая
неуравновешенность
ж: моментная
неуравновешенность
д:
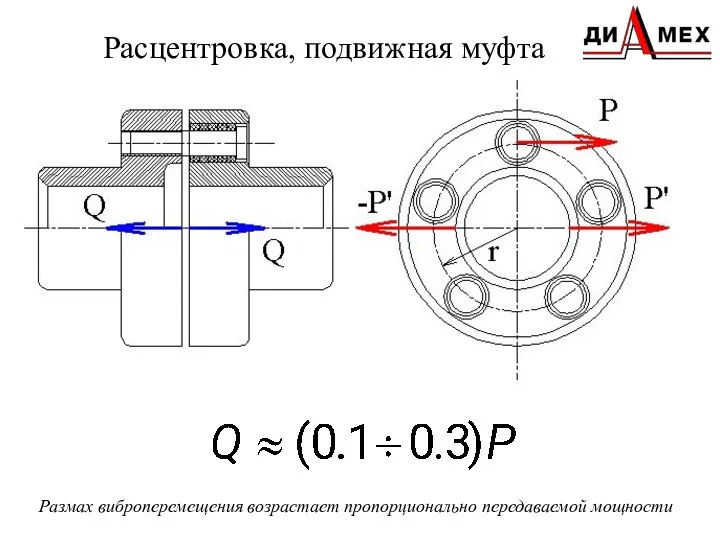
Расцентровка, подвижная муфта
Размах виброперемещения возрастает пропорционально передаваемой мощности
Расцентровка, подвижная муфта
Размах виброперемещения возрастает пропорционально передаваемой мощности
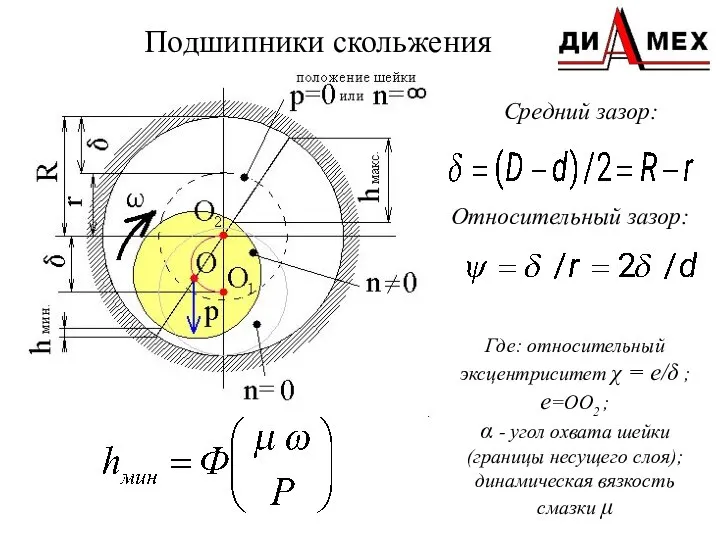
Подшипники скольжения
Средний зазор:
Относительный зазор:
Где: относительный эксцентриситет χ = e/δ ; e=OO2
Подшипники скольжения
Средний зазор:
Относительный зазор:
Где: относительный эксцентриситет χ = e/δ ; e=OO2
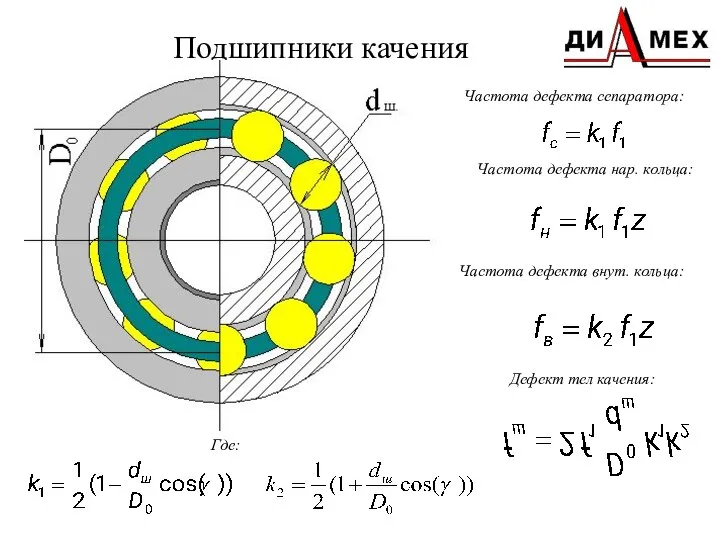
Подшипники качения
Частота дефекта сепаратора:
Частота дефекта нар. кольца:
Частота дефекта внут. кольца:
Дефект тел
Подшипники качения
Частота дефекта сепаратора:
Частота дефекта нар. кольца:
Частота дефекта внут. кольца:
Дефект тел
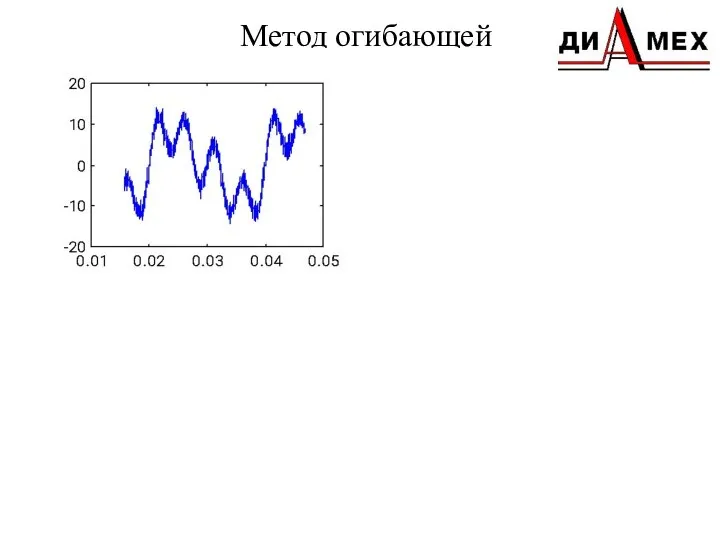
Метод огибающей
Метод огибающей
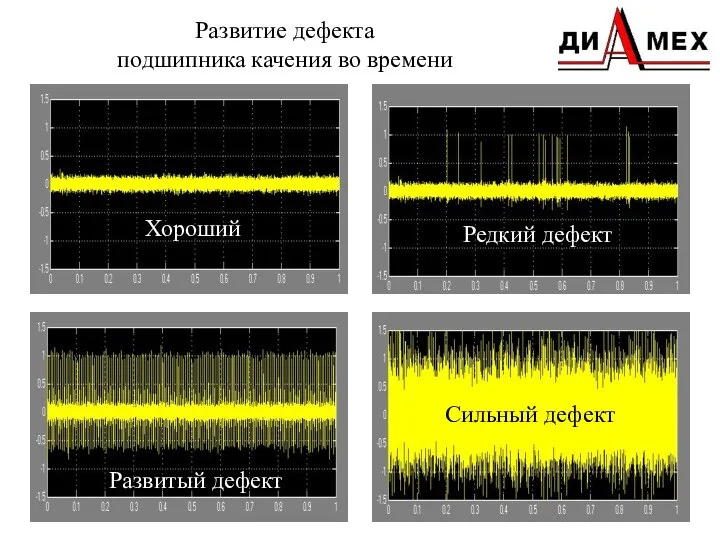
Развитие дефекта
подшипника качения во времени
Хороший
Редкий дефект
Развитый дефект
Сильный дефект
Развитие дефекта
подшипника качения во времени
Хороший
Редкий дефект
Развитый дефект
Сильный дефект
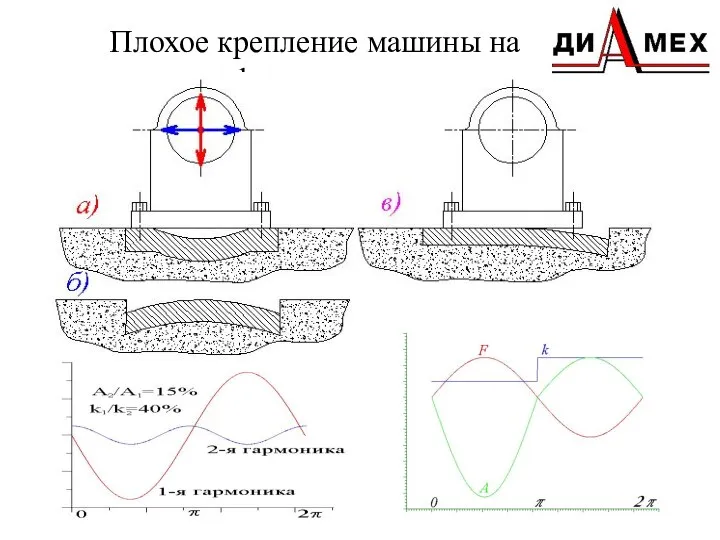
Плохое крепление машины на фундаменте
Плохое крепление машины на фундаменте
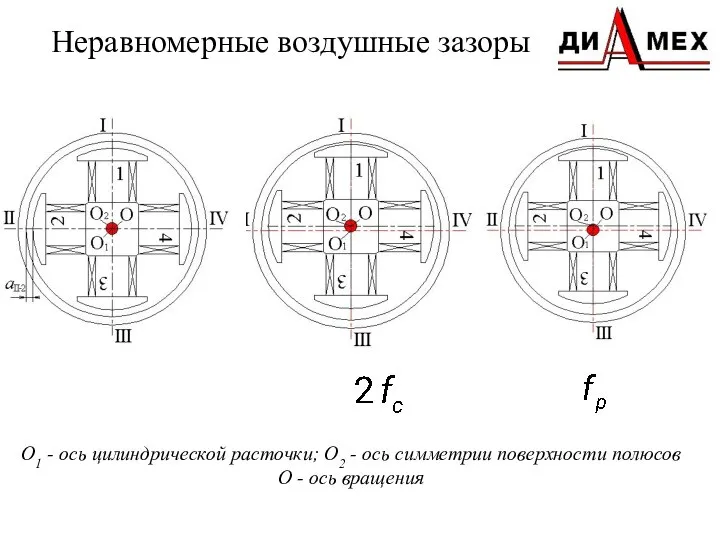
Неравномерные воздушные зазоры
О1 - ось цилиндрической расточки; О2 - ось симметрии
Неравномерные воздушные зазоры
О1 - ось цилиндрической расточки; О2 - ось симметрии
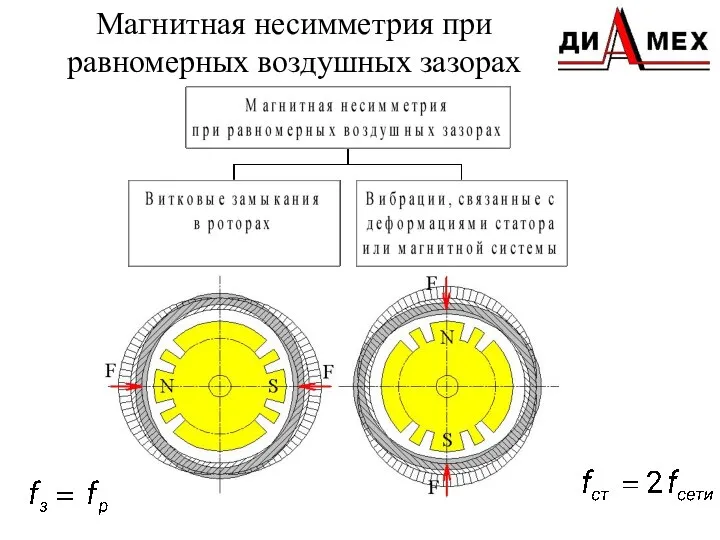
Магнитная несимметрия при равномерных воздушных зазорах
Магнитная несимметрия при равномерных воздушных зазорах
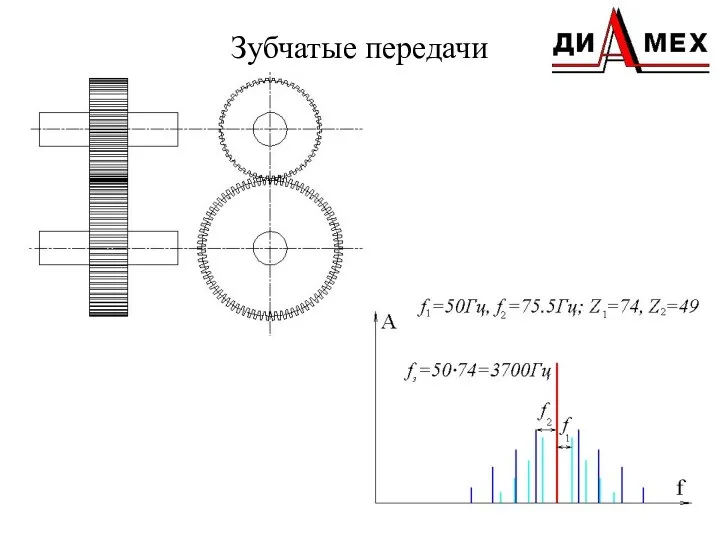
Зубчатые передачи
Зубчатые передачи
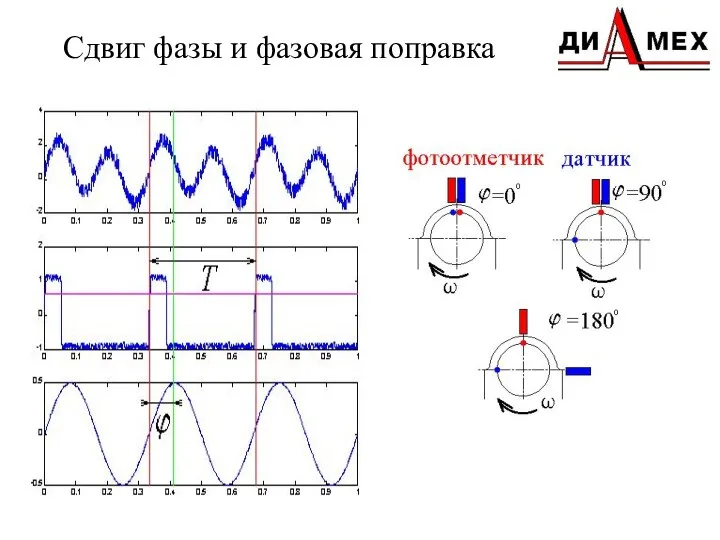
Сдвиг фазы и фазовая поправка
Сдвиг фазы и фазовая поправка
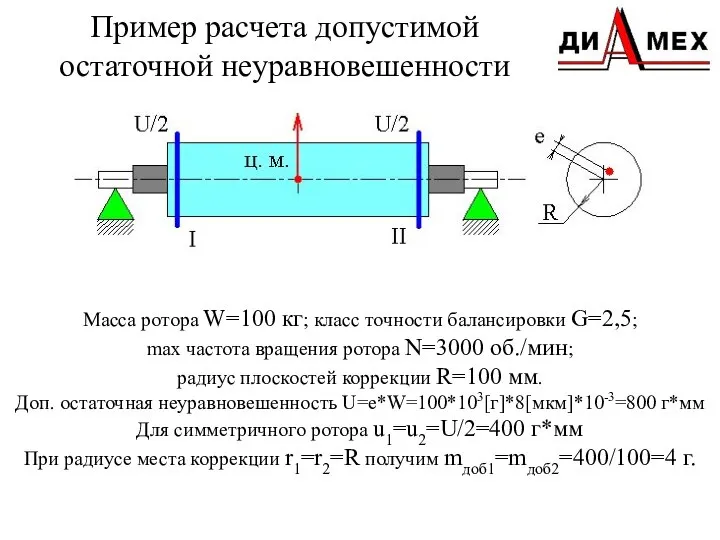
Пример расчета допустимой остаточной неуравновешенности
Масса ротора W=100 кг; класс точности балансировки
Пример расчета допустимой остаточной неуравновешенности
Масса ротора W=100 кг; класс точности балансировки
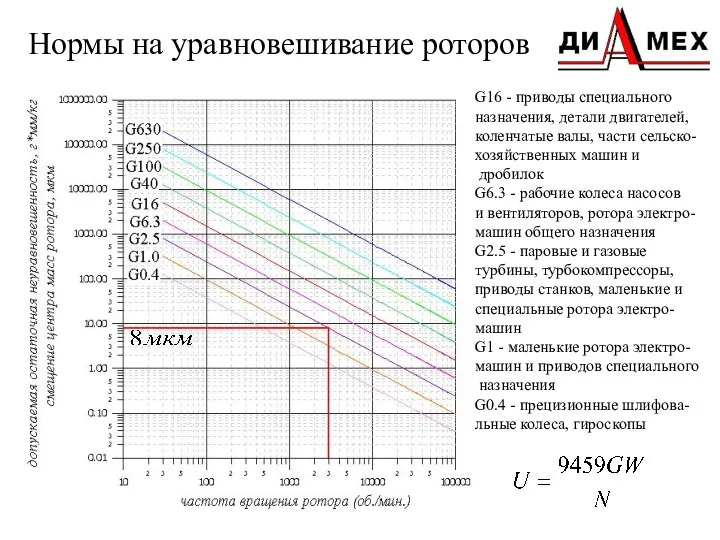
Нормы на уравновешивание роторов
G16 - приводы специального
назначения, детали двигателей,
коленчатые валы, части
Нормы на уравновешивание роторов
G16 - приводы специального
назначения, детали двигателей,
коленчатые валы, части
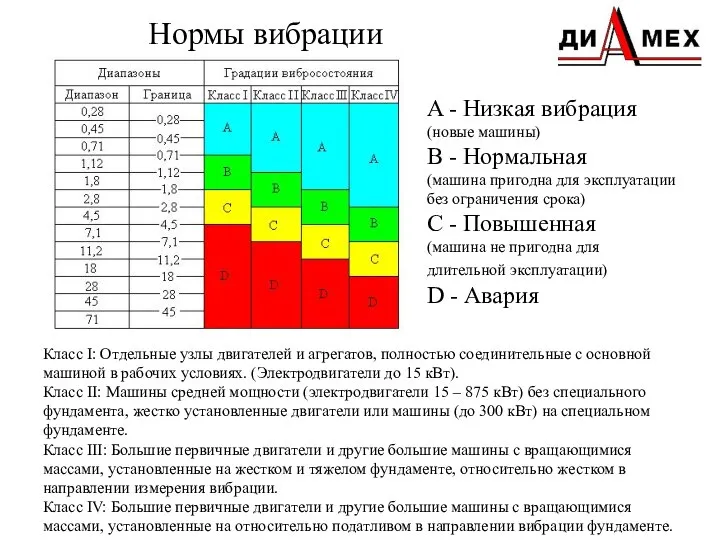
Нормы вибрации
Класс I: Отдельные узлы двигателей и агрегатов, полностью соединительные с
Нормы вибрации
Класс I: Отдельные узлы двигателей и агрегатов, полностью соединительные с
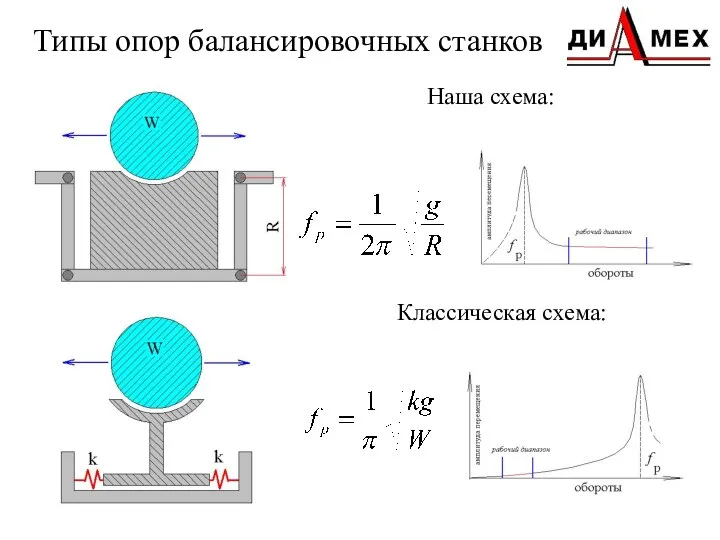
Типы опор балансировочных станков
Наша схема:
Классическая схема:
Типы опор балансировочных станков
Наша схема:
Классическая схема:
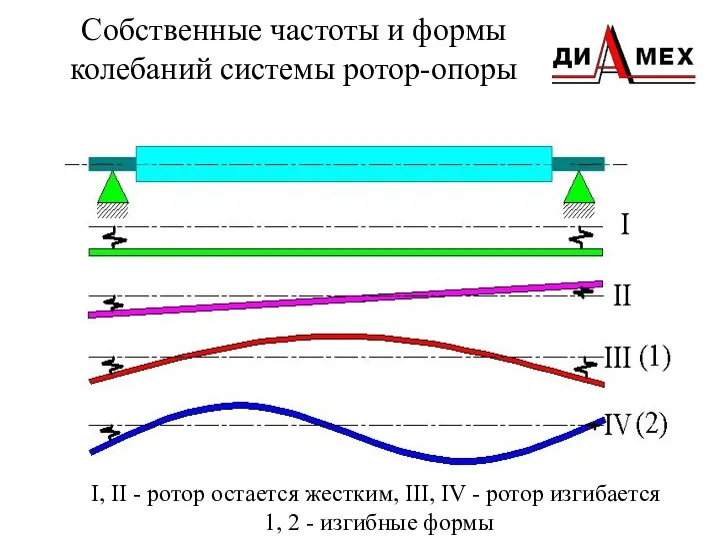
Собственные частоты и формы колебаний системы ротор-опоры
I, II - ротор остается
Собственные частоты и формы колебаний системы ротор-опоры
I, II - ротор остается
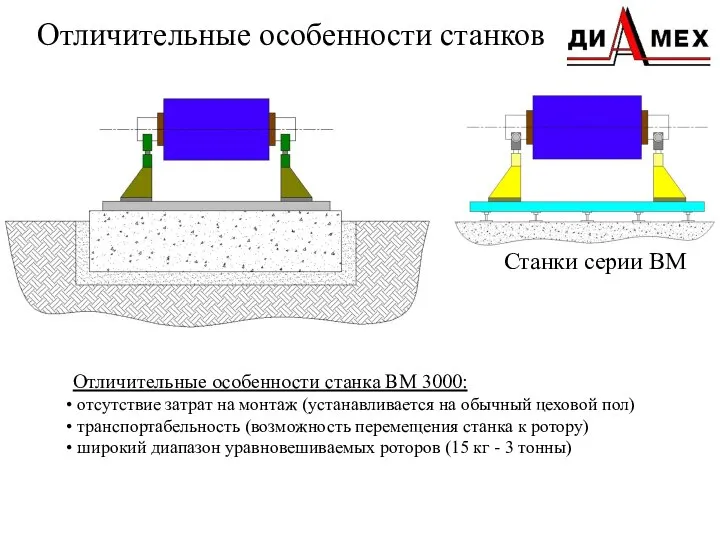
Отличительные особенности станков
Отличительные особенности станка ВМ 3000:
отсутствие затрат на монтаж
Отличительные особенности станков
Отличительные особенности станка ВМ 3000:
отсутствие затрат на монтаж
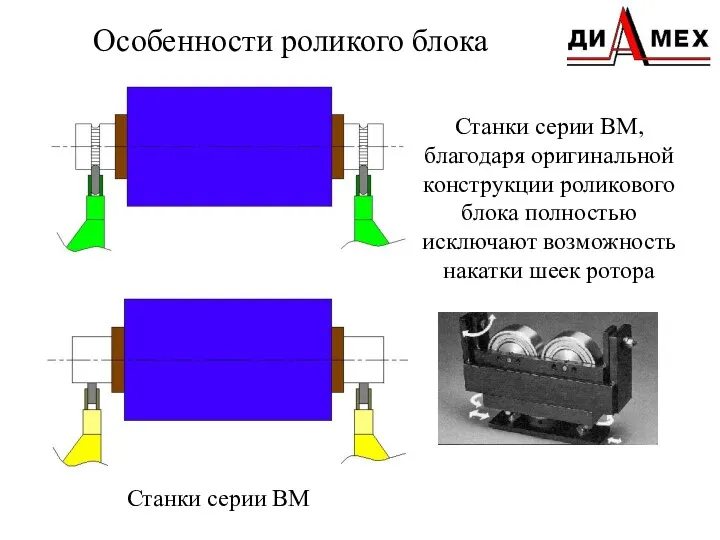
Особенности роликого блока
Станки серии ВМ
Станки серии ВМ,
благодаря оригинальной
конструкции роликового
блока
Особенности роликого блока
Станки серии ВМ
Станки серии ВМ,
благодаря оригинальной
конструкции роликового
блока
 Засади поширення радіохвиль
Засади поширення радіохвиль Механические колебания и их характеристики. Виды колебаний. Механические волны
Механические колебания и их характеристики. Виды колебаний. Механические волны Давление газа
Давление газа Механическое движение и его виды
Механическое движение и его виды Характеристика систем электроснабжения воздушных судов. Состав, назначение и классификация систем электроснабжения. (Тема 1.1)
Характеристика систем электроснабжения воздушных судов. Состав, назначение и классификация систем электроснабжения. (Тема 1.1) Эксплуатация релейной защиты электрооборудования электрических станций
Эксплуатация релейной защиты электрооборудования электрических станций Квадратичные эффекты отражения в ферромагнетиках
Квадратичные эффекты отражения в ферромагнетиках Статика
Статика Модель атома Резерфорда. Атомные спектры. Постулаты Бора. Опыт Франка и Герца. Элементарная боровская теория водородного атома
Модель атома Резерфорда. Атомные спектры. Постулаты Бора. Опыт Франка и Герца. Элементарная боровская теория водородного атома Толқындық оптика
Толқындық оптика Ультразвуковые колебания. Ультразвук и инфразвук
Ультразвуковые колебания. Ультразвук и инфразвук Сила струму. Амперметр. Вимірювання сили струму. (9 класс)
Сила струму. Амперметр. Вимірювання сили струму. (9 класс) Қатты диэлектриктің жылулық және ионизациялық тесілуі
Қатты диэлектриктің жылулық және ионизациялық тесілуі Презентация по физике "Измерение размеров деталей с помощью штангенциркуля" - скачать
Презентация по физике "Измерение размеров деталей с помощью штангенциркуля" - скачать  Окружающий мир как иерархическая система. 9 класс
Окружающий мир как иерархическая система. 9 класс Элементы квантовой статистики и физики твёрдого тела. Лекция № 7. Часть 2
Элементы квантовой статистики и физики твёрдого тела. Лекция № 7. Часть 2 Построение эпюр внутренних сил, напряжений и деформаций растяжения-сжатия
Построение эпюр внутренних сил, напряжений и деформаций растяжения-сжатия Магнитное поле. Действие магнитного поля на электрический заряд и опыты, иллюстрирующее это действие. Магнитная индукция
Магнитное поле. Действие магнитного поля на электрический заряд и опыты, иллюстрирующее это действие. Магнитная индукция Флуиди. Идеален флуид
Флуиди. Идеален флуид Радиоактивность – способность некоторых ядер самопроизвольно превращаться в другие ядра с испусканием различных видов радио
Радиоактивность – способность некоторых ядер самопроизвольно превращаться в другие ядра с испусканием различных видов радио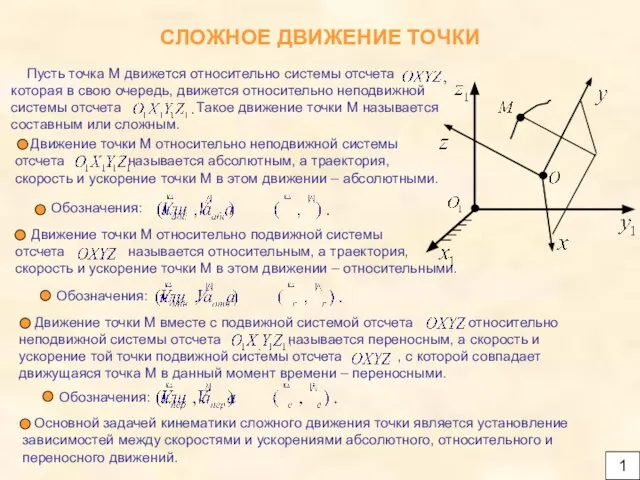 Сложное движение точки
Сложное движение точки Третий закон термодинамики
Третий закон термодинамики Резонанс в цепи переменного тока
Резонанс в цепи переменного тока Презентация Что изучает Физика
Презентация Что изучает Физика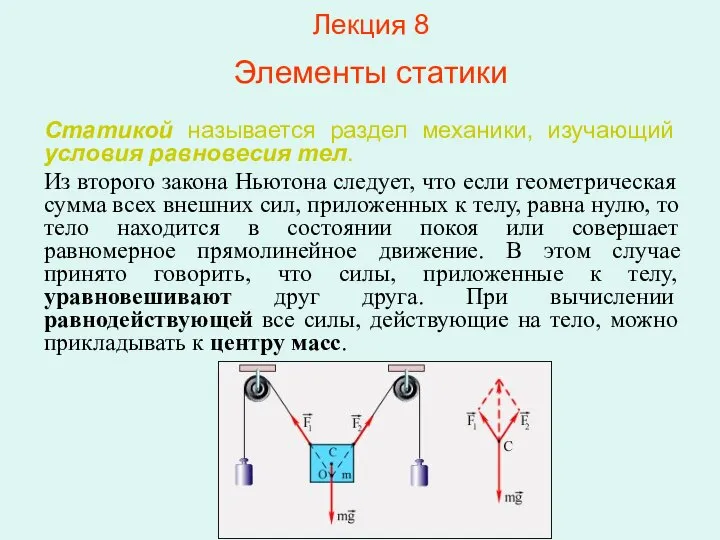 Элементы статики
Элементы статики Строение вещества, атома
Строение вещества, атома Онлайн Электрик: Расчет и анализ установившихся режимов электрических сетей
Онлайн Электрик: Расчет и анализ установившихся режимов электрических сетей Распространение плоских волн в гиротропных средах
Распространение плоских волн в гиротропных средах