- Релейный регулятор для движения по границе черного и белого

Содержание
- 2. План занятия Регуляторы Ветвление Задача движения по границе Значение серого Релейные регуляторы Двухпозиционный регулятор Калибровка датчика
- 3. Регулятор Регулятор – это совокупность устройств, обеспечивающих желаемое поведение системы. Поплавковый регулятор Ползунова, 1765 г. Центробежный
- 4. Ветвление Ветвление – часть алгоритма, в которой в зависимости от условия выполняется один или другой набор
- 5. Движение вдоль границы черного и белого Задача двигаться по границе черного и белого с помощью датчика
- 6. Тележка с одним датчиком освещенности 1 B C
- 7. Двухпозиционный релейный регулятор Двухпозиционный релейный регулятор имеет два состояния: освещенность > серого, освещенность ≤ серого. Двухпозиционный
- 8. Релейный регулятор: движение вдоль границы черного и белого Движение на релейном регуляторе слишком неровное: робота заносит
- 9. Трехпозиционный релейный регулятор Рассмотрим окрестность вокруг значения серого ±5 процентов свет>50 | 50≥свет>40 | свет≤40 белый
- 10. Движение по линии с двумя датчиками освещенности 1 2 B C
- 11. Релейный регулятор: движение с двумя датчиками освещенности Оба на белом – движение прямо, левый (S1) на
- 12. Релейный четырехпозиционный регулятор: вложенное ветвление На каждой ветви проверки первого датчика идет проверка второго датчика Алгоритм
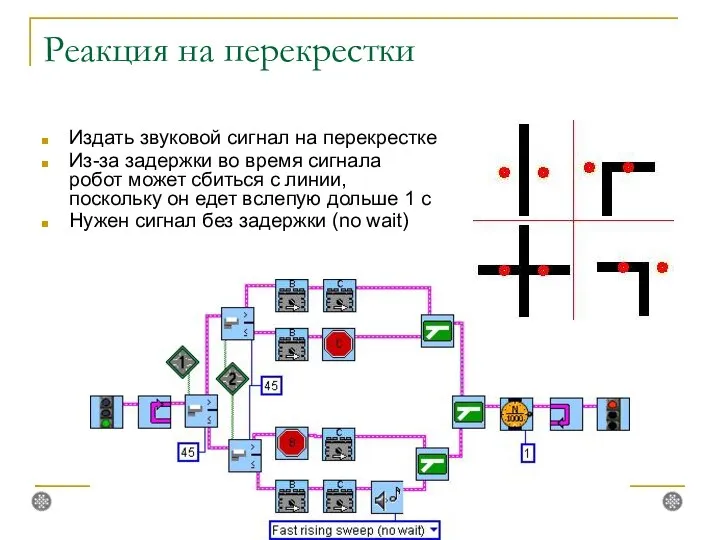
- 13. Реакция на перекрестки Издать звуковой сигнал на перекрестке Из-за задержки во время сигнала робот может сбиться
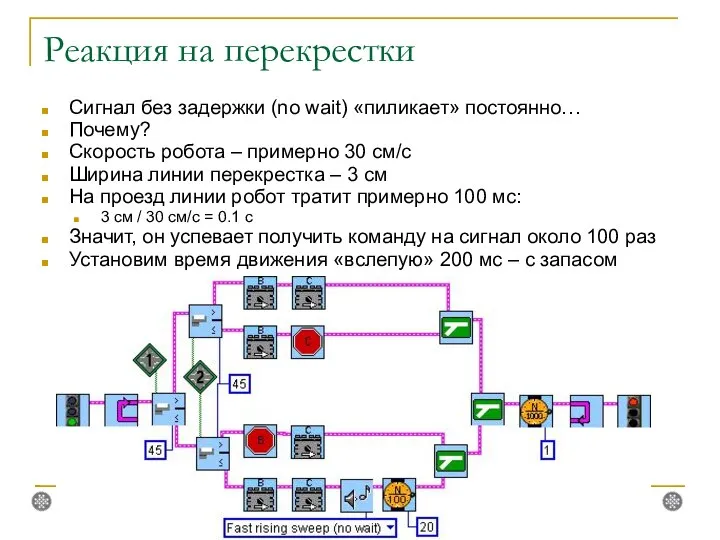
- 14. Реакция на перекрестки Сигнал без задержки (no wait) «пиликает» постоянно… Почему? Скорость робота – примерно 30
- 15. Контейнер Контейнер – ячейка памяти с числовым значением, которое можно изменить Обнулить контейнер Добавить в контейнер
- 16. Подсчет перекрестков Обнуляем контейнер Повторяем цикл, пока значение контейнера меньше 5 На каждом перекрестке добавляем в
- 18. Скачать презентацию
План занятия
Регуляторы
Ветвление
Задача движения по границе
Значение серого
Релейные регуляторы
Двухпозиционный регулятор
Калибровка датчика
Корректировка скорости
Трехпозиционный регулятор
План занятия
Регуляторы
Ветвление
Задача движения по границе
Значение серого
Релейные регуляторы
Двухпозиционный регулятор
Калибровка датчика
Корректировка скорости
Трехпозиционный регулятор
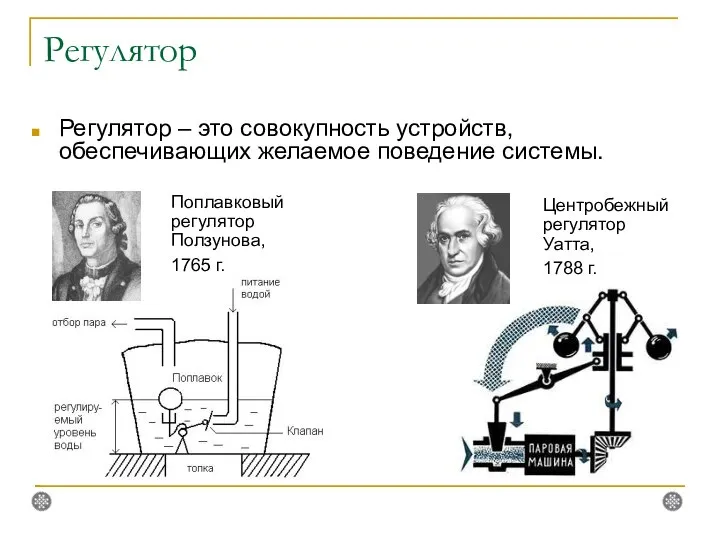
Регулятор
Регулятор – это совокупность устройств, обеспечивающих желаемое поведение системы.
Поплавковый регулятор Ползунова,
Регулятор
Регулятор – это совокупность устройств, обеспечивающих желаемое поведение системы.
Поплавковый регулятор Ползунова,
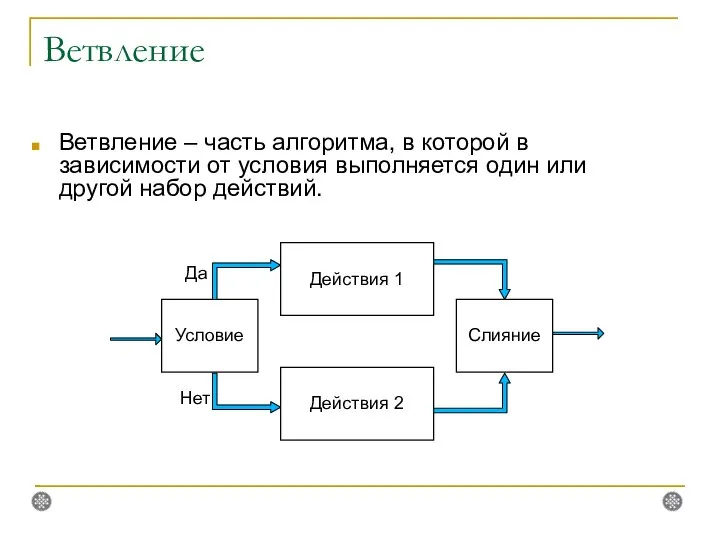
Ветвление
Ветвление – часть алгоритма, в которой в зависимости от условия выполняется
Ветвление
Ветвление – часть алгоритма, в которой в зависимости от условия выполняется
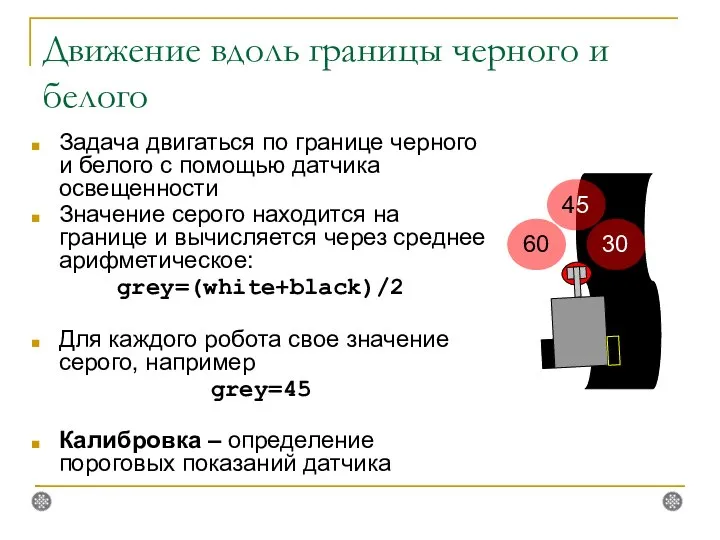
Движение вдоль границы черного и белого
Задача двигаться по границе черного и
Движение вдоль границы черного и белого
Задача двигаться по границе черного и
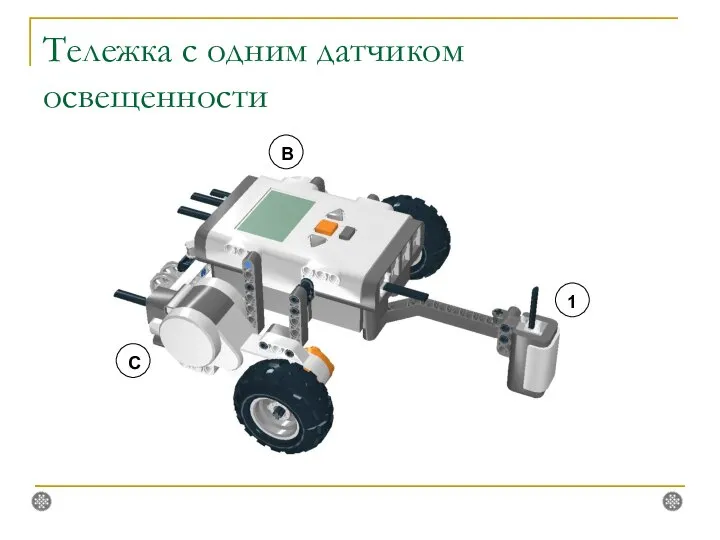
Тележка с одним датчиком освещенности
1
B
C
Тележка с одним датчиком освещенности
1
B
C
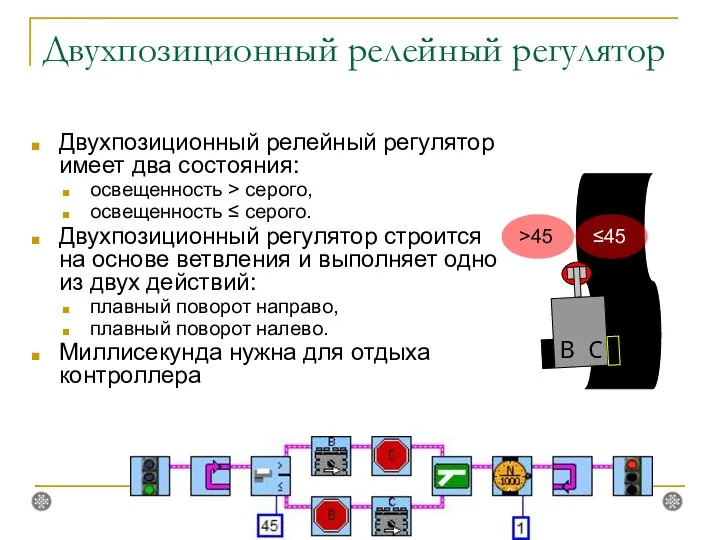
Двухпозиционный релейный регулятор
Двухпозиционный релейный регулятор имеет два состояния:
освещенность > серого,
Двухпозиционный релейный регулятор
Двухпозиционный релейный регулятор имеет два состояния:
освещенность > серого,
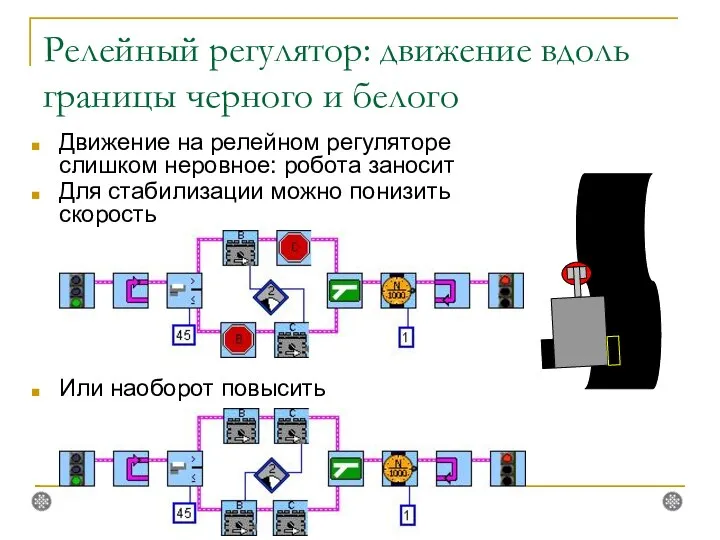
Релейный регулятор: движение вдоль границы черного и белого
Движение на релейном регуляторе
Релейный регулятор: движение вдоль границы черного и белого
Движение на релейном регуляторе
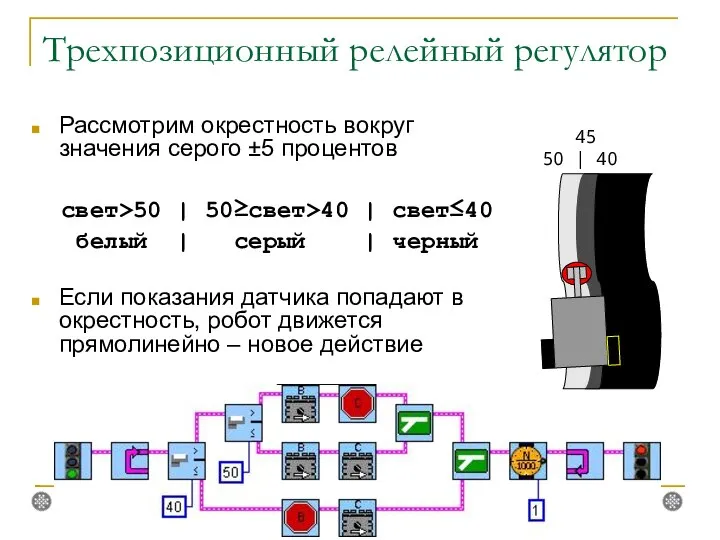
Трехпозиционный релейный регулятор
Рассмотрим окрестность вокруг значения серого ±5 процентов
свет>50 |
Трехпозиционный релейный регулятор
Рассмотрим окрестность вокруг значения серого ±5 процентов
свет>50 |

Движение по линии с двумя датчиками освещенности
1
2
B
C
Движение по линии с двумя датчиками освещенности
1
2
B
C
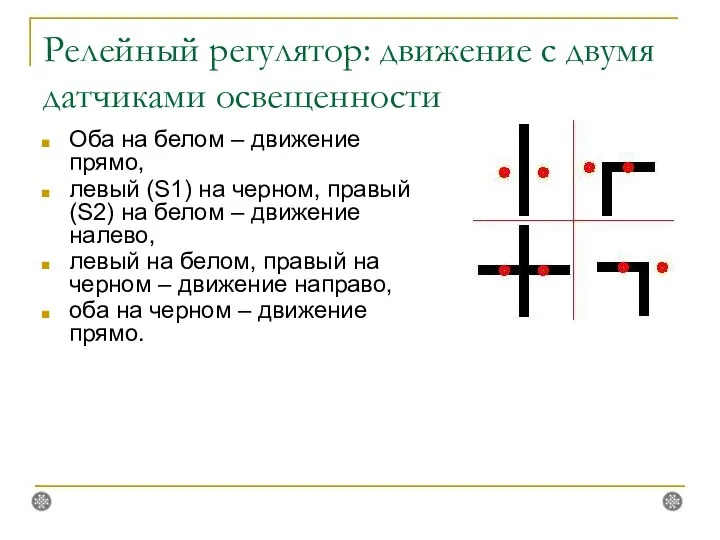
Релейный регулятор: движение с двумя датчиками освещенности
Оба на белом – движение
Релейный регулятор: движение с двумя датчиками освещенности
Оба на белом – движение

Релейный четырехпозиционный регулятор: вложенное ветвление
На каждой ветви проверки первого датчика идет
Релейный четырехпозиционный регулятор: вложенное ветвление
На каждой ветви проверки первого датчика идет
Реакция на перекрестки
Издать звуковой сигнал на перекрестке
Из-за задержки во время сигнала
Реакция на перекрестки
Издать звуковой сигнал на перекрестке
Из-за задержки во время сигнала
Реакция на перекрестки
Сигнал без задержки (no wait) «пиликает» постоянно…
Почему?
Скорость робота –
Реакция на перекрестки
Сигнал без задержки (no wait) «пиликает» постоянно…
Почему?
Скорость робота –

Контейнер
Контейнер – ячейка памяти с числовым значением, которое можно изменить
Обнулить контейнер
Добавить
Контейнер
Контейнер – ячейка памяти с числовым значением, которое можно изменить
Обнулить контейнер
Добавить

Подсчет перекрестков
Обнуляем контейнер
Повторяем цикл, пока значение контейнера меньше 5
На каждом перекрестке
Подсчет перекрестков
Обнуляем контейнер
Повторяем цикл, пока значение контейнера меньше 5
На каждом перекрестке
 Средства защиты от перенапряжений. (Лекция 2.5)
Средства защиты от перенапряжений. (Лекция 2.5) Хроматография. Основные виды хроматографии
Хроматография. Основные виды хроматографии Презентація на тему: “Механічна робота. Потужність” Учня 10-А класу ЗОШ №25 м. Луцька Матвійчука Романа Зберігайте, будь-ласка, тишу !!! Умійте цінувати працю інших людей.
Презентація на тему: “Механічна робота. Потужність” Учня 10-А класу ЗОШ №25 м. Луцька Матвійчука Романа Зберігайте, будь-ласка, тишу !!! Умійте цінувати працю інших людей.  Бета-распад атомных ядер. (Тема 1.4)
Бета-распад атомных ядер. (Тема 1.4) Склокомпозиційні матеріали для спаювання з широким інтервалом ТКЛР
Склокомпозиційні матеріали для спаювання з широким інтервалом ТКЛР Лекция о работе с рациями
Лекция о работе с рациями Магнітний запис інформації Підготувала учениця 11 класу Степанова Тетяна
Магнітний запис інформації Підготувала учениця 11 класу Степанова Тетяна  Погрешности измерений. Правила округления результатов измерений
Погрешности измерений. Правила округления результатов измерений Презентація з фізики на тему “ Сила Ампера, та Правило лівої руки” Виконала: Учениця 11- А класу Твердохліб Анжеліка
Презентація з фізики на тему “ Сила Ампера, та Правило лівої руки” Виконала: Учениця 11- А класу Твердохліб Анжеліка  Лекция № 2 Формирование квантовых понятий о веществе
Лекция № 2 Формирование квантовых понятий о веществе Жидко-солевой реактор. (Лекция 14)
Жидко-солевой реактор. (Лекция 14) Исследовательская работа по теме: «Архимед»
Исследовательская работа по теме: «Архимед»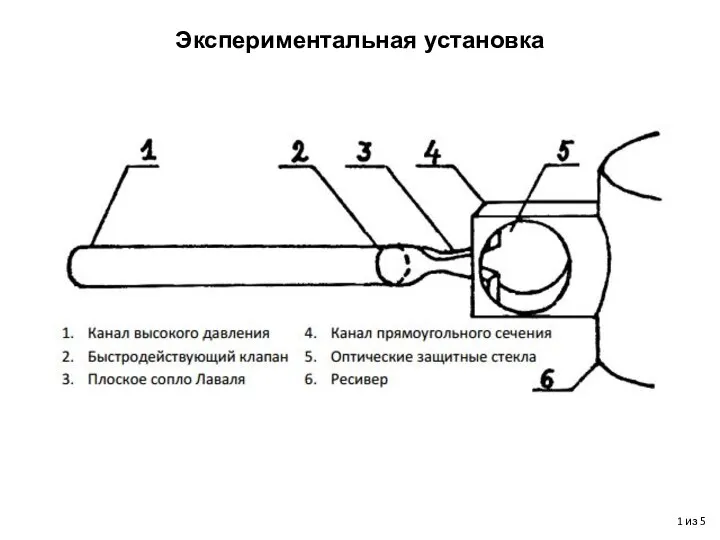 Экспериментальная установка. Метод интерферометра
Экспериментальная установка. Метод интерферометра 1 раунд игры (своя игра)
1 раунд игры (своя игра) Трансмісія вертольота
Трансмісія вертольота Простейший колебательный контур
Простейший колебательный контур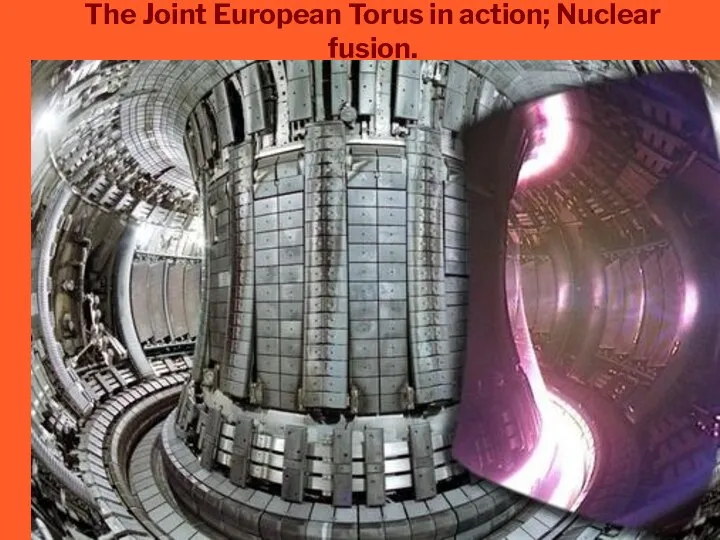 The Joint European Torus in action; Nuclear fusion
The Joint European Torus in action; Nuclear fusion Автомобильные аккумуляторные батареи
Автомобильные аккумуляторные батареи Решение задач на применения закона сохранения импульса
Решение задач на применения закона сохранения импульса Искровой и коронный разряды. Молния. Громоотвод
Искровой и коронный разряды. Молния. Громоотвод Звездные карты и виртуальный планетарий Выступление ученика 11 а кл. ГОУ РШИСП № 5 Зайнутдинова Ильгизара Научный руководитель
Звездные карты и виртуальный планетарий Выступление ученика 11 а кл. ГОУ РШИСП № 5 Зайнутдинова Ильгизара Научный руководитель 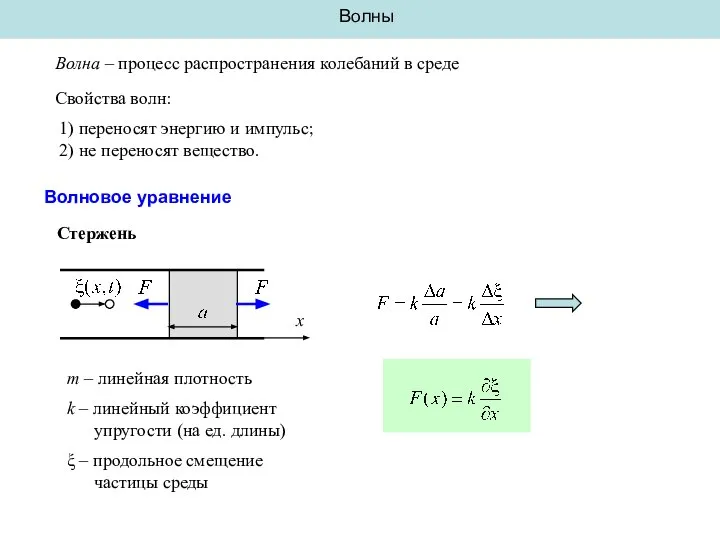 Волны. Волновое уравнение
Волны. Волновое уравнение Ограничители перенапряжения
Ограничители перенапряжения Архимедова сила. Плавание тел. Занятие №6
Архимедова сила. Плавание тел. Занятие №6 Специальня теория относительности Эйнштейна
Специальня теория относительности Эйнштейна Методы магнитного резонанса ЯМР - спектроскопия
Методы магнитного резонанса ЯМР - спектроскопия Введение в динамику системы. Масса. Центр масс. Моменты инерции
Введение в динамику системы. Масса. Центр масс. Моменты инерции Кинематика вращательного движения. Динамика поступательного движения
Кинематика вращательного движения. Динамика поступательного движения