- Статика твердого тела

Содержание
- 2. Система сил – это совокупность сил, действующее на данное тело (точку). Кинематическое состояние – это состояние
- 3. Задаваемые силы выражают действие на тело, других тел, вызывающих или способных изменять его кинематическое состояние. Реакции
- 4. Аксиома 2. Присоединение и отбрасывание сил, взаимно уравновешивающихся, не изменяет действия сил, приложенных ранее к телу.
- 5. Аксиома 5. Равновесие деформирующегося нетвердого тела не нарушается, если тело станет абсолютно твердым. Эта аксиома выражает
- 6. Основные типы связей Рассмотрим основные типы связей и силы их реакций. А) шарнирно-подвижная связь (опора с
- 7. В) связь в виде гладкой плоскости. Реакция гладкой плоскости направлена касательно перпендикулярно к плоскости (а,б) или
- 8. Д) связь в виде сферического шарнира или подпятника. Реакция сферического шарнира (или подпятника) раскладывается на три
- 10. Скачать презентацию
Система сил – это совокупность сил, действующее на данное тело (точку).
Система сил – это совокупность сил, действующее на данное тело (точку).
Задаваемые силы выражают действие на тело, других тел, вызывающих или способных
Задаваемые силы выражают действие на тело, других тел, вызывающих или способных
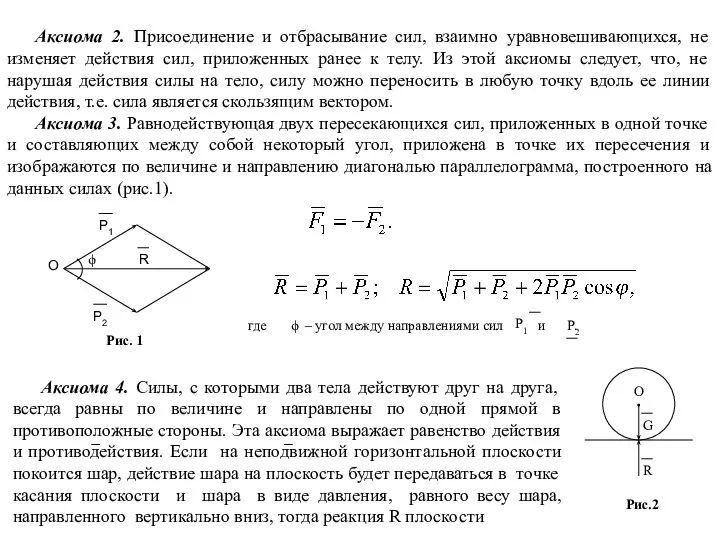
Аксиома 2. Присоединение и отбрасывание сил, взаимно уравновешивающихся, не изменяет действия

Аксиома 5. Равновесие деформирующегося нетвердого тела не нарушается, если тело станет
Аксиома 5. Равновесие деформирующегося нетвердого тела не нарушается, если тело станет
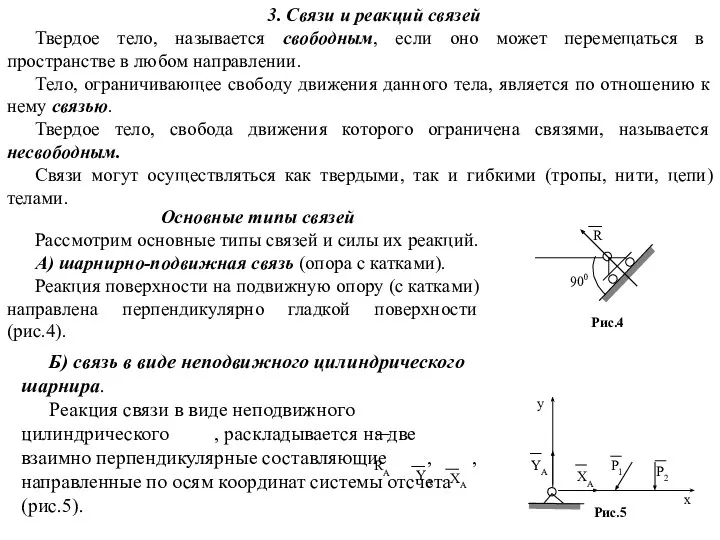
Основные типы связей
Рассмотрим основные типы связей и силы их реакций.
А)
Основные типы связей
Рассмотрим основные типы связей и силы их реакций.
А)
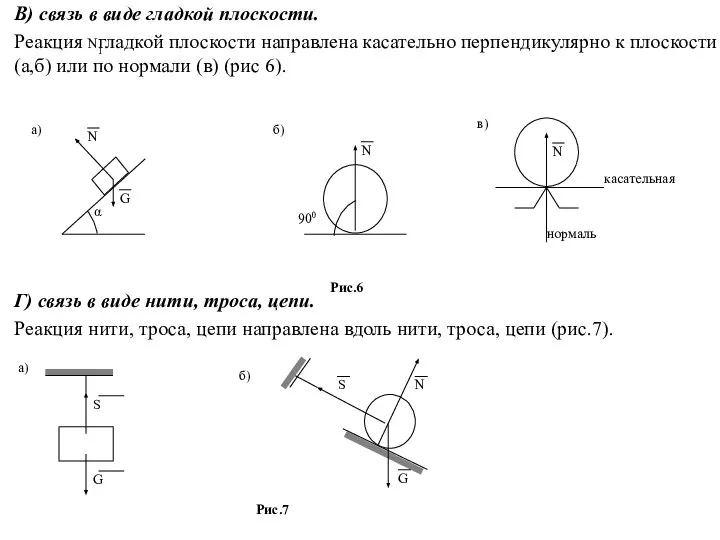
В) связь в виде гладкой плоскости.
Реакция гладкой плоскости направлена касательно перпендикулярно
В) связь в виде гладкой плоскости.
Реакция гладкой плоскости направлена касательно перпендикулярно

Д) связь в виде сферического шарнира или подпятника.
Реакция сферического шарнира (или
Д) связь в виде сферического шарнира или подпятника.
Реакция сферического шарнира (или
 Ионизирующее излучение
Ионизирующее излучение Гаражи-стоянки
Гаражи-стоянки Магнитное поле. Электромагнитные явления
Магнитное поле. Электромагнитные явления Кинематические характеристики движения
Кинематические характеристики движения Видимость. Атмосферная видимость
Видимость. Атмосферная видимость Конденсаторы
Конденсаторы Защитные покрытия. Восстановление корпусов насосов
Защитные покрытия. Восстановление корпусов насосов Взаимодействие электромагнитного излучения
Взаимодействие электромагнитного излучения Контрольная работа 1 по теме Кинематика
Контрольная работа 1 по теме Кинематика Подвески
Подвески Кипение воды. Опыты
Кипение воды. Опыты Лазеры
Лазеры Уравнения поступательного движения
Уравнения поступательного движения Взаимодействие тел. Масса. Решение задач. Урок физики в 7 классе. Учебник Пёрышкин А.В. Учитель Кононова Е.Ю.
Взаимодействие тел. Масса. Решение задач. Урок физики в 7 классе. Учебник Пёрышкин А.В. Учитель Кононова Е.Ю. Тест. Энергия
Тест. Энергия Магнитные наносистемы и наноматериалы
Магнитные наносистемы и наноматериалы Термодинамика. Тепловая машина. (Лекция 7)
Термодинамика. Тепловая машина. (Лекция 7) Диффузия в газах, жидкостях и твердых телах.
Диффузия в газах, жидкостях и твердых телах. Электрохимиялық генератор
Электрохимиялық генератор Основы гидравлики
Основы гидравлики Геометрическая оптика
Геометрическая оптика  Барометр-анероид
Барометр-анероид ГАЛАКТИКИ и туманности
ГАЛАКТИКИ и туманности Методы исследования поверхности и/или тонких слоев
Методы исследования поверхности и/или тонких слоев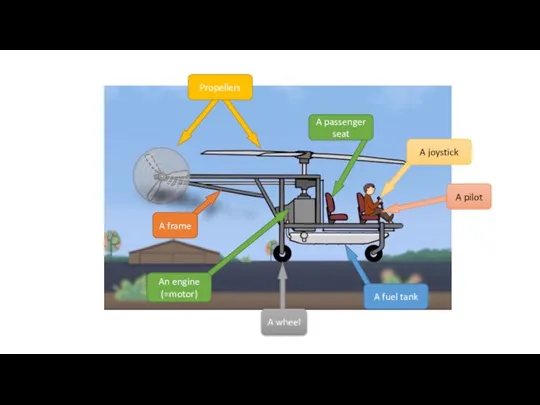 Helicopter
Helicopter Електричне поле
Електричне поле Лекция 35. Дифракция света
Лекция 35. Дифракция света Влияние способов клёпки на ресурс клёпаных соединений
Влияние способов клёпки на ресурс клёпаных соединений