- Решение задачи на равновесие плоской произвольной системы сил

Содержание
- 2. Определение реакций связей твердого тела Практическое занятие №4
- 3. Ось х не должна быть перпендикулярной к прямой, проходящей через центры А и В Центры А,
- 4. где : - уравнение проекций всех сил на ось х - уравнение проекций всех сил на
- 5. Важно ! Для одного твердого тела можно составить только три (!) независимых уравнения равновесия по одной
- 6. Важно ! В задаче на равновесие одного твердого тела может быть только три неизвестные силы (обычно
- 7. Методика решения задач: 2. Изобразить активные (заданные) силы 3. Освободить тело от связей, приложив соответствующие реакции.
- 8. Полезно помнить, что : уравнение моментов будет более простым (содержать меньше неизвестных), если брать моменты относительно
- 9. Полезно помнить, что : при вычислении момента силы часто бывает удобно воспользоваться теоремой Вариньона, то есть
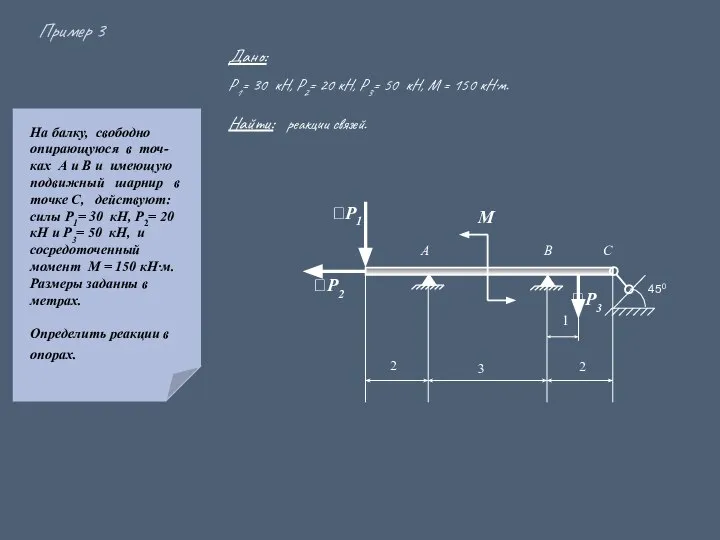
- 10. Пример 3 1 3 2 М 2 А В С Р2 Р1 Р3 На балку, свободно
- 11. Решение: 1. Рассмотрим равновесие балки АВС. . . . 1 3 2 2 А В С
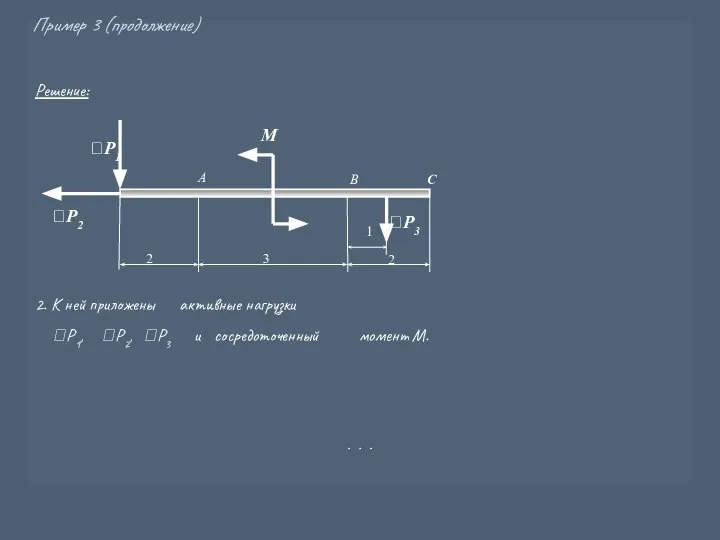
- 12. Решение: 2. К ней приложены активные нагрузки Р1, Р2, Р3 и сосредоточенный момент М. . .
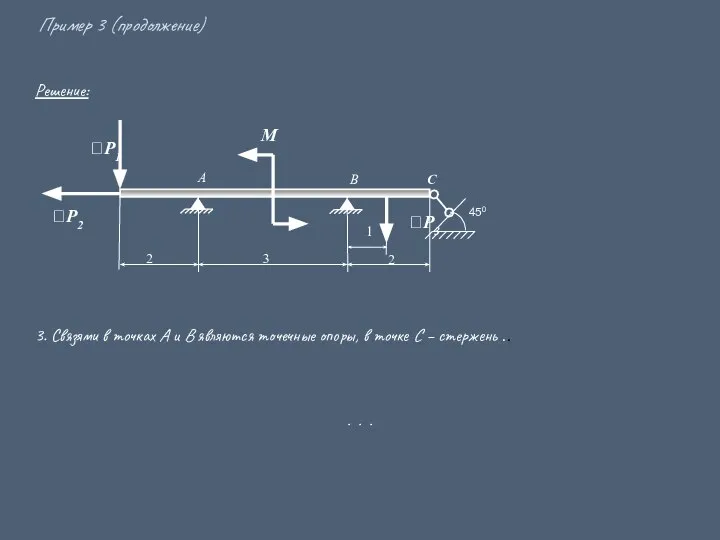
- 13. Решение: 3. Связями в точках А и В являются точечные опоры, в точке С – стержень
- 14. Решение: 4. Сделаем расчетную схему. Для этого отбросим связи, заменив их тремя реакциями RA, RB ,
- 15. Решение: 5. Направим оси координат и составим уравнения равновесия: ΣМЕ(Fi)=0: 2P1-5P2+M-4P3+3RB=0 (1) ΣМD(Fi)=0: 5P1-2P2+M-1P3-3RA=0 (2) ΣFix=0:
- 16. Решение: 6. Решая полученные уравнения (1), (2), (3) относительно искомых реакций, получим: RB = (-2P1+5P2-M+4P3)/3 =
- 18. Скачать презентацию
Определение реакций связей твердого тела
Практическое занятие №4
Определение реакций связей твердого тела
Практическое занятие №4
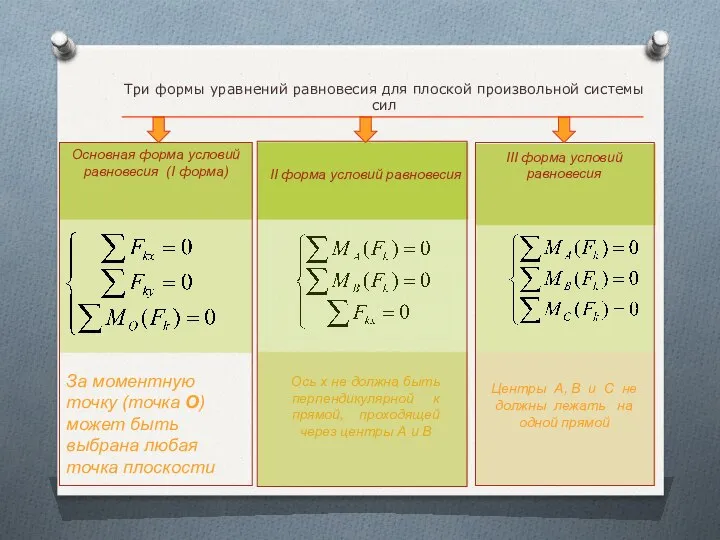
Ось х не должна быть перпендикулярной к прямой, проходящей через центры
Ось х не должна быть перпендикулярной к прямой, проходящей через центры
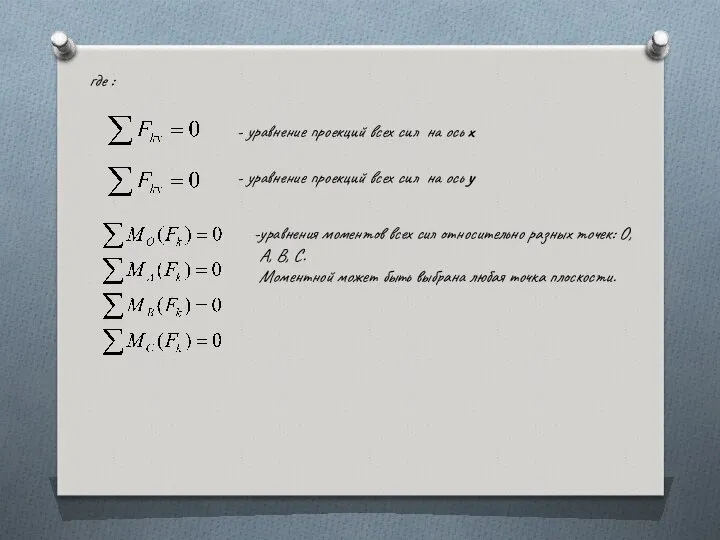
где :
- уравнение проекций всех сил на ось х
- уравнение проекций
где :
- уравнение проекций всех сил на ось х
- уравнение проекций
Важно !
Для одного твердого тела можно составить только три (!) независимых
Важно !
Для одного твердого тела можно составить только три (!) независимых
Важно !
В задаче на равновесие одного твердого тела может быть только
Важно !
В задаче на равновесие одного твердого тела может быть только
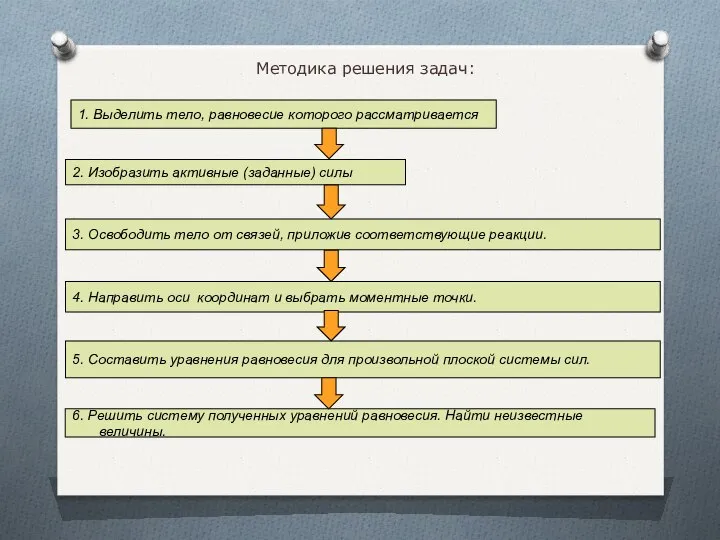
Методика решения задач:
2. Изобразить активные (заданные) силы
3. Освободить тело от связей,
Методика решения задач:
2. Изобразить активные (заданные) силы
3. Освободить тело от связей,
Полезно помнить, что :
уравнение моментов будет более простым (содержать меньше неизвестных),
Полезно помнить, что :
уравнение моментов будет более простым (содержать меньше неизвестных),
Полезно помнить, что :
при вычислении момента силы часто бывает удобно воспользоваться
Полезно помнить, что :
при вычислении момента силы часто бывает удобно воспользоваться
Пример 3
1
3
2
М
2
А
В
С
Р2
Р1
Р3
На балку, свободно опирающуюся в точ-ках А и В и
Пример 3
1
3
2
М
2
А
В
С
Р2
Р1
Р3
На балку, свободно опирающуюся в точ-ках А и В и
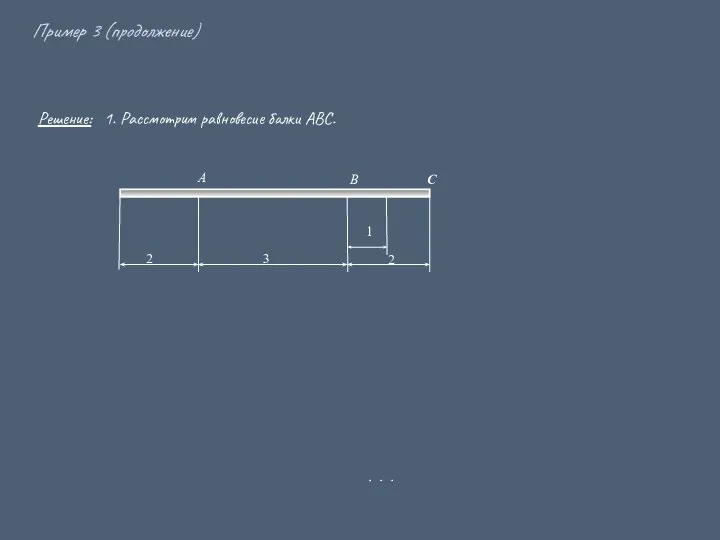
Решение: 1. Рассмотрим равновесие балки АВС.
. . .
1
3
2
2
А
В
С
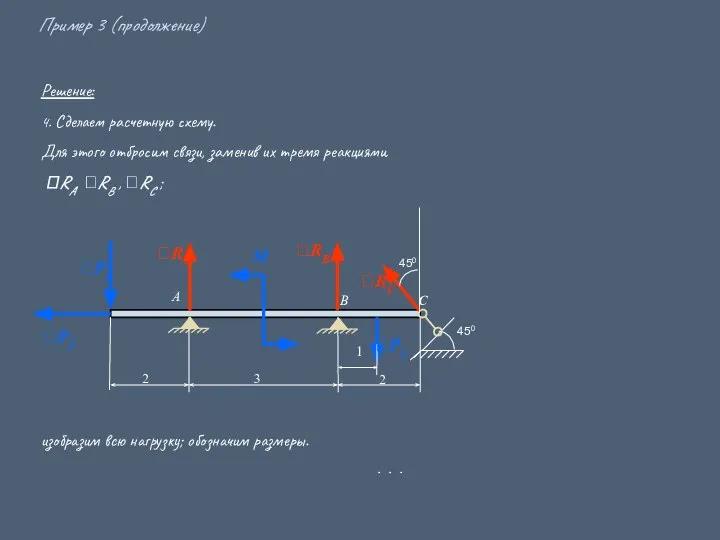
Пример 3 (продолжение)
Решение: 1. Рассмотрим равновесие балки АВС.
. . .
1
3
2
2
А
В
С
Пример 3 (продолжение)
Решение:
2. К ней приложены активные нагрузки
Р1, Р2, Р3 и сосредоточенный
2. К ней приложены активные нагрузки
Р1, Р2, Р3 и сосредоточенный
Решение:
3. Связями в точках А и В являются точечные опоры, в
3. Связями в точках А и В являются точечные опоры, в
Решение:
4. Сделаем расчетную схему.
Для этого отбросим связи, заменив их
4. Сделаем расчетную схему.
Для этого отбросим связи, заменив их
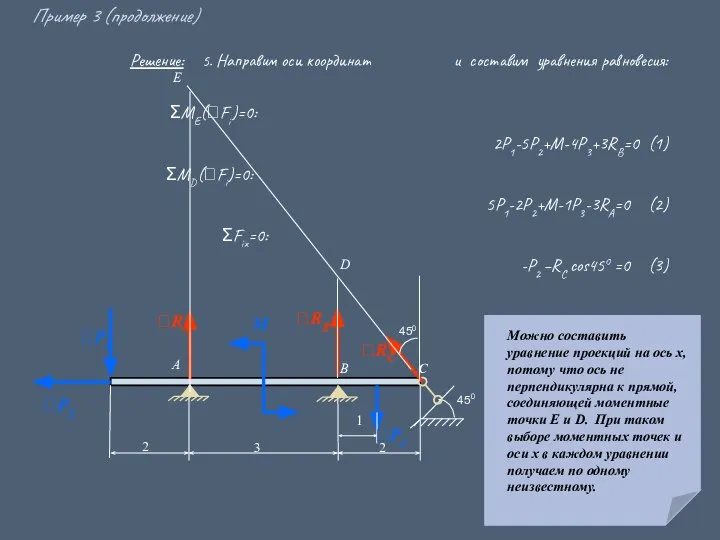
Решение: 5. Направим оси координат и составим уравнения равновесия:
Решение: 5. Направим оси координат и составим уравнения равновесия:
Решение:
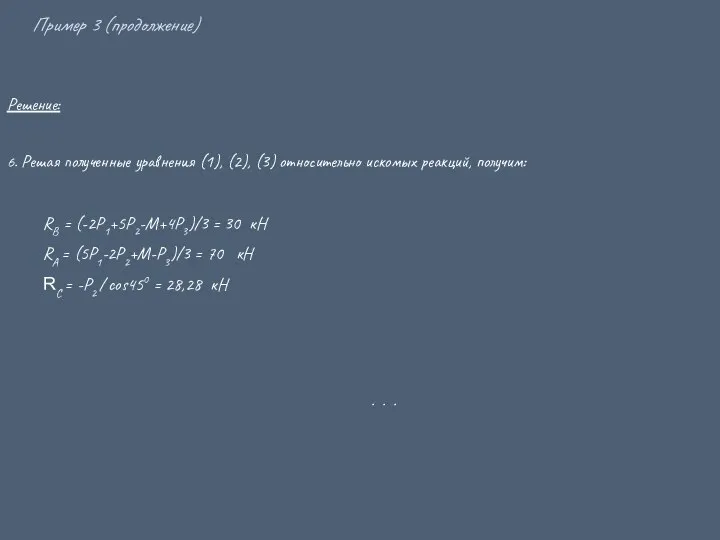
6. Решая полученные уравнения (1), (2), (3) относительно искомых
Решение:
6. Решая полученные уравнения (1), (2), (3) относительно искомых
 Закон сохранения полной механической энергии
Закон сохранения полной механической энергии Эксперименты по физике
Эксперименты по физике Classical angular momentum and magnetic dipole moment
Classical angular momentum and magnetic dipole moment Електричний струм у газах
Електричний струм у газах Специальная теория относительности
Специальная теория относительности 21-mavzu: Muxitlarda elektr toki
21-mavzu: Muxitlarda elektr toki Физические явления
Физические явления Физические величины
Физические величины Поверхностное натяжение и поверхностная энергия жидкостей
Поверхностное натяжение и поверхностная энергия жидкостей Техническое обслуживание автомобильной техники
Техническое обслуживание автомобильной техники Волновая функция, свойства волновой функции. Уравнение Шредингера. (Лекция 4)
Волновая функция, свойства волновой функции. Уравнение Шредингера. (Лекция 4) Условия полного внутреннего отражения
Условия полного внутреннего отражения Гравітаційне поле. Сила тяжіння. Перша космічна швидкість
Гравітаційне поле. Сила тяжіння. Перша космічна швидкість Логарифмы в физике
Логарифмы в физике Магнитное поле
Магнитное поле Лекция 3. Электромагнитная индукция
Лекция 3. Электромагнитная индукция Шкала Фаренгейта
Шкала Фаренгейта Сила — векторная величина
Сила — векторная величина Виды электрических разрядов и их применение
Виды электрических разрядов и их применение Световое поле, обобщение и выводы
Световое поле, обобщение и выводы Волновая оптика
Волновая оптика На чем основано воздухоплавание
На чем основано воздухоплавание Взаимодействие частиц и излучений с веществом
Взаимодействие частиц и излучений с веществом Механика жидкостей и газов. Механические волны
Механика жидкостей и газов. Механические волны Генератор переменного тока
Генератор переменного тока Термодинамические процессы с идеальным газом
Термодинамические процессы с идеальным газом Волновая функция. Общее и стационарное уравнение шредингера. Математический аппарат квантовой механики
Волновая функция. Общее и стационарное уравнение шредингера. Математический аппарат квантовой механики Твердотельные лазеры
Твердотельные лазеры